涡流阵列检测修正C扫描成像技术研究
2011-10-19罗飞路侯良洁
刘 波,罗飞路,侯良洁
(国防科技大学机电工程与自动化学院,长沙 410073)
涡流阵列(Eddy Current Array,ECA)检测技术是涡流无损检测技术中新兴的技术分支,它是通过检测传感器结构的特殊设计,运用计算机技术和数字信号处理技术,实现对材料和零部件的快速、有效地检测。由于具有高空间分辨率、无需自动扫描装置和可视化等优势,该技术已广泛应用于飞机机体、飞机轮毂、核电站蒸发器传热管、管棒条型材、平面大面积金属板材、焊接缝隙等领域的无损检测中[1-3]。涡流阵列检测技术已成为当前涡流检测技术和传感器技术中的重要发展方向。
涡流阵列成像技术是阵列检测技术的重要组成部分,是实现缺陷快速、有效检测不可或缺的关键技术。常用的涡流阵列成像方法一般可分为阻抗平面图、带状视图和 C扫描视图[4-5]。阻抗平面图是将阻抗幅值和相位变化进行二维显示。带状视图将阻抗变化曲线随扫描时间变化进行二维显示。用涡流阵列检测阻抗变化量的大小来调节图像的灰度,阻抗变化量越大,则图像颜色越深,表示受检件损伤越严重。据此可以做出缺陷的俯视图,称为C扫描图像,C扫描图像采用伪三维显示技术。C扫描图像在无须无损检测人员大量先验知识的条件下,可以快速准确地判断受检件有无缺陷、缺陷的大致位置等信息,为常规检测提供便利。
涡流阵列C扫描图像是涡流阵列检测方法定性判断受检件有无缺陷和缺陷特征信息的重要依据,但是,涡流阵列C扫描成像存在如下问题:(1)C扫描成像方法中线圈单元点扩展函数卷积效应导致缺陷图像模糊[6],检测人员无法较为精确判断缺陷的位置、长度、方向等信息;(2)激励检测式涡流阵列检测中C扫描成像红色标识的缺陷区域与实际缺陷区域存在位置差。本文结合涡流阵列特征提取方法和图像处理方法,提出了可以较为准确反映裂纹位置、长度、方向等特征信息的涡流阵列修正C扫描成像。
1 涡流阵列无损检测平台
1.1 涡流阵列检测硬件平台
涡流阵列检测硬件系统如图1所示,分为阵列传感器、DDS信号发生电路、运放和功放电路、线圈单元阵列的模拟开关阵、正交锁定放大电路和数据采集处理显示五部分。DDS发生单频、双频或脉冲信号,经滤波、放大与传感器线圈单元阵列的模拟开关阵连接,对阵列传感器线圈单元阵列进行同时、分时激励。线圈单元阵列的模拟开关阵对激励和检测传感器同时选通。阵列传感器线圈单元阵列通过线圈单元阵列的模拟开关阵将检测信号送至正交锁定放大(Lock-in Amplifier,LIA)电路,调理后用 PCI卡采集数据,进行数据处理,完成涡流成像和缺陷检测。
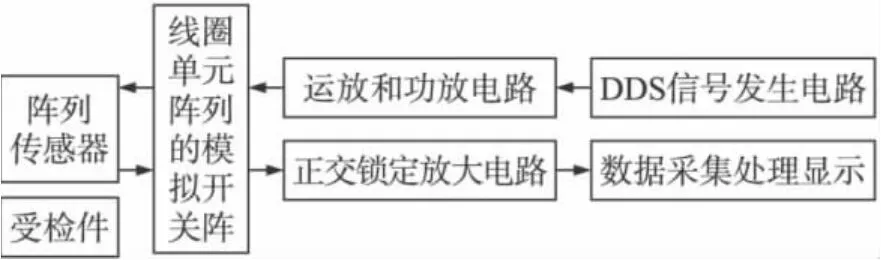
图1 涡流阵列无损检测平台硬件组成框图
1.2 涡流阵列传感器的设计
前期研究采用有限元数值计算方法,以线圈单元组为简化的研究对象,以检测灵敏度、空间分辨率和线圈单元组有效检测区域比率等评价指标为依据,对平板表层缺陷检测涡流阵列传感器线圈单元内径、外径、高度等参数,线圈单元中心距,线圈单元排布方式进行了设计,此处不再赘述[7-9]。基于优化结果,制作了涡流阵列传感器,排布方式如图2中所示。所有线圈单元尺寸均相同,外径3.5 mm,内径1 mm,高3 mm。线圈单元组呈等边三角形分布,线圈单元中心距为10 mm。
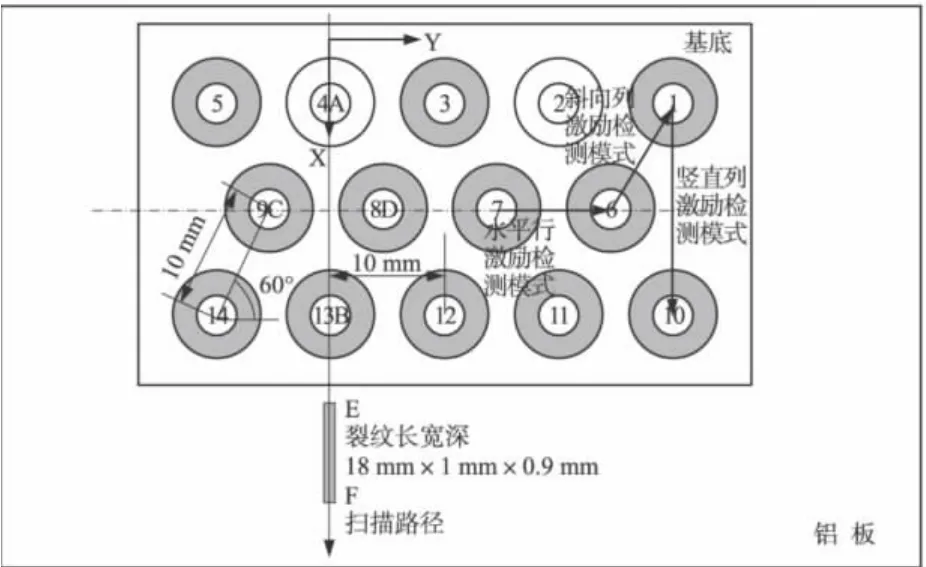
图2 涡流阵列传感器示意图
1.3 激励检测模式
基于图2所示涡流阵列传感器,根据裂纹特征提取方法的不同,确定了如下三种检测模式:斜向列检测模式,如线圈单元6激励,线圈单元1检测;竖直列检测模式,如线圈单元1激励,线圈单元10检测;水平行检测模式,如线圈单元7激励,线圈单元6检测。具体的裂纹特征提取方法见§3.2。
2 涡流阵列C扫描成像
由于检测原理和硬件实现方法的不同,涡流阵列C扫描成像与常规涡流检测C扫描成像存在几点区别:①涡流阵列检测由于不同通道硬件性能、传感器线圈单元参数、线圈单元排布方式等差异,采集得到的数据须进行通道校准,才能较为准确的反映缺陷真实特征信息;②常规C扫描成像由于有自动扫描装置,扫描方向和垂直于扫描方向单位扫描尺度均可以很小,阵列检测由于没有扫描装置,垂直于扫描方向的单位扫描尺度决定于线圈单元的中心距和阵列传感器的排布方式等,通常情况下为线圈单元1/2中心距或1/4中心距,涡流阵列C扫描成像由于垂直扫描方向图像信息较少,通常需要应用插值方法得到更多的图像信息。
涡流阵列C扫描成像通道校准实时性要求较高,实际检测中一般根据待测部件的参考缺陷,选定激励幅值、频率和相位等参量,各个检测通道通过调节自身增益和激励信号、参考信号相位差等消除输出信号的差异,相同检测模式中所有通道可以同时校准。图3为仪器进行通道校准后应用斜向列检测模式沿图2所示扫描路径对18 mm×1 mm×0.9 mm裂纹实施检测图像,图3(a)~图3(e)分别代表Y方向5个相邻检测线圈单元所得检测曲线。图4为相邻检测通道间线性插值所得C扫描图像。
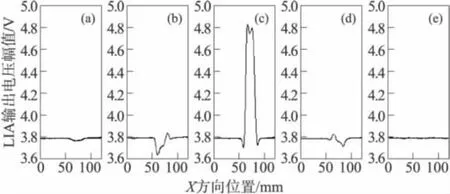
图3 通道校准后应用斜向列检测模式裂纹检测图像
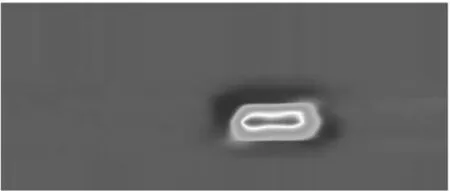
图4 涡流阵列检测C扫描图像
3 涡流阵列修正C扫描成像
3.1 成像原理
涡流阵列检测由于线圈单元互为激励检测,所成C扫描图像不具有对称性,由图3校准后波形也可以看出,且裂纹所在位置与红色区域有较大的位置差。由于涡流阵列传感器线圈单元点扩展函数卷积效应导致缺陷图像模糊,无法确定缺陷长度、宽度等边缘位置,从而影响涡流阵列检测的可靠性和检测效率。
基于上述原因,本文提出了涡流阵列修正C扫描成像,并将裂纹特征提取方法与图像处理方法有机结合,实现了涡流阵列修正C扫描成像。图像重构过程如下:
(1)依据裂纹C扫描图像特征,将C扫描图像进行图像分割,每个裂纹区域形成一个子图像以便于分析。
(2)对每个子图像进行旋转变换和灰度分析,结合裂纹特征提取方法获得方向、宽度中心位置、长度方向边缘点位置、长度、深度等裂纹特征信息。
(3)对每个子图像的原灰度图进行灰度映射、中值滤波、边缘提取、轮廓跟踪、空间平移等操作后,应用长度边缘点对图像模糊区域的修正值,约束细化操作的迭代次数,得到修正C扫描图像。
涡流阵列修正C扫描图像由于包含裂纹的方向、位置、长度等信息,因此,它作为C扫描图像的一种衍生图像,可以提高部件无损检测的速度和可靠性。
3.2 修正C扫描成像中的裂纹特征提取方法
根据上述图像重构过程,修正C扫描成像中包含裂纹的方向、位置、长度、深度信息,下面结合成像过程对各种特征信息的获取方法分别进行阐述。
(1)方向信息获取
对每个子图像进行0°~90°旋转变换和灰度分析,对于每个变换后的图像求取Y方向非零元素的灰度均值。当待测件含直裂纹,则灰度均值最大的投影方向即为裂纹方向,和值最大的Y坐标可近似认为裂纹宽度中心的Y坐标;当待测部件含折线裂纹或曲线裂纹时,可近似看作数个不同方向直裂纹的叠加,求得灰度和值几个极大值方向进行比较,若夹角大于某一经验值,则认为待测件裂纹为折线裂纹或曲线裂纹。
(2)长度边缘点位置和长度获取
沿裂纹宽度中心的Y坐标,提取每个子图像Y方向非零元素的灰度值分布,根据相应检测模式的长度特征量提取方法得到裂纹长度方向边缘点位置和长度。
三种检测模式下裂纹长度特征量提取方法如下:斜向列检测模式下,LIA输出波形前(后)波峰和后(前)波谷对应扫描长度即为裂纹长度,两波谷对应的扫描长度为裂纹长度与检测激励线圈单元中心距沿扫描方向的分量之和;竖直列检测模式下,LIA输出波形波峰和波谷对应扫描长度即为裂纹长度,两波谷对应的扫描长度为裂纹长度与检测激励线圈单元中心距沿扫描方向的分量之和;水平行检测模式下,LIA输出波形前波峰和前波谷间拐点与后波峰和后波谷间拐点对应的扫描长度近似为裂纹长度。应用斜向列检测模式扫描裂纹缺陷时,激励线圈单元先到达裂纹边缘点和检测检测线圈先到达裂纹边缘点LIA输出波形特征略有不同。如果为激励线圈单元先到达,则长度边缘点对应为前波峰点和后波谷点;反之,则为后波峰点和前波谷点。
(3)深度获取
由于裂纹长度和宽度一定时,裂纹深度与三种检测模式中LIA输出波形波峰峰值成单调递增关系,可应用插值拟合或神经网络方法,快速估计出裂纹深度。提取每个子图像宽度中心位置前(后)波峰点的灰度值,运用深度先验数据获取裂纹深度信息。
3.3 修正C扫描成像中的图像处理方法
涡流阵列修正C扫描成像解决图像裂纹位置与实际裂纹所在位置存在位置差和由线圈单元的点扩展效应引起的图像模糊两个问题,并将§3.2提取的裂纹特征信息,尽可能直观地复现。下面就形成修正C扫描成像中的图像处理方法进行论述。
(1)涡流阵列C扫描图像的图像分割
一般情况下,涡流阵列C扫描图像包含图像背景、一个或多个缺陷区域、图像灰度渐变但非缺陷区域等。当仅含一个裂纹时,裂纹区域可能只是图像的一小部分,如果对整幅图像进行处理算法实时性较差且难度增加,合理的方法是分割出包含裂纹区域的一小部分进行处理;当包含多个裂纹时,可将图像分割成多个子图像,对所有子图像进行初步判断滤除掉没有裂纹区域的子图像。
图像处理中的图像分割技术大致可以分为三类:基于区域的分割算法、基于边缘的分割算法和结合特定理论工具的分割算法[10-11]。基于区域的分割方法的目的是将图像划分为不同的区域,是以直接寻找区域为基础的分割技术。基于区域的分割方法有两种基本形式:一种是区域生长,从单个像素出发,逐步合并以形成所需要的分割区域;另一种是从全局出发,逐步切割至所需的分割区域。典型的基于区域的图像分割方法有阈值法、区域生长和分裂合并的方法等。
涡流阵列C扫描图像的图像分割因其分割目标的特殊性,应用现有的基于区域的分割方法均很难有效解决,但由于有大量的先验知识,可制定非常具有针对性的分割规则完成图像分割。本文基于裂纹特征提取方法对涡流阵列C扫描图像提出如下分割算法:
①从全局出发,分析整幅图像Y方向灰度变化,如果存在某些Y方向图像灰度变化满足相应检测模式下的裂纹长度特征提取曲线的变化特征,则认为存在裂纹,须进行图像分割;否则,不进行图像分割,认定此次检测无裂纹区域。
②X方向图像分割。如果整幅图Y方向的灰度变化曲线仅含一个满足裂纹长度边缘提取曲线变化特征的区域,则可提取满足特征的所有灰度变化曲线的前波谷点和后波谷点的X坐标,确定两波谷点差值最大的Y方向,该Y方向的前波谷X坐标记为x1,后波谷X坐标记为x2,分割出X坐标大于x1-max(x2-x1),小于x2+max(x2-x1)的区域。如果整幅图Y方向的灰度变化曲线包含多个满足裂纹长度边缘提取曲线变化特征的区域,则可确定所有裂纹区域两波谷点差值最大的Y方向,求取相邻两裂纹区域中前裂纹区域差值最大Y方向的后波谷点与后裂纹区域差值最大Y方向的前波谷点的中心点,定为子图像分割边缘。
③Y方向图像分割。Y方向多裂纹区域的识别可通过分析满足裂纹长度边缘提取曲线变化特征的所有Y方向坐标,由图3可以看出,裂纹宽度中心方向满足长度边缘提取曲线,但当距宽度中心大于某一阈值,则并不满足长度边缘提取曲线。由此可知,如果Y方向存在几个裂纹,则满足长度边缘提取曲线的Y坐标值集中于对应数量的几个区域。具体的分割规则与规则②类似,限于篇幅此处不再赘述。
根据上述算法,可将C扫描图像进行图像分割,每个裂纹区域形成一个子图像分析方便,且分割算法实时性较强。
(2)涡流阵列C扫描图像的轮廓提取
为了使修正后的C扫描图像保留原始图像最根本的信息,图像模糊区域消除和裂纹位置差修正均基于原始图像的轮廓进行。涡流阵列C扫描图像的轮廓提取包含了灰度映射、中值滤波、边缘提取和轮廓跟踪等过程。
灰度映射在电桥式涡流阵列传感器所成C扫描图像的轮廓提取中作用较小,但对于激励检测式阵列传感器所成C扫描图像的轮廓提取非常必要。前者裂纹长度边缘灰度值均大于图像背景灰度值,长度两边缘均为强边缘,经过后续算法处理较易得到裂纹区域轮廓;而后者的斜向列和竖直列检测模式,裂纹总有一个边缘对应的灰度值小于图像背景灰度值,且与背景的灰度差远小于另一边缘与背景的灰度差,边缘提取算法易存在边缘信息提取不完备情况。为了改善边缘提取的效果和降低算法的复杂度,可对含裂纹区域的子图像进行如下灰度映射:

式中,g(x,y)为原始图像灰度值,f(x,y)为映射后灰度值,M为灰度直方图分布密度最大值点,N为映射后灰度直方图分布密度最大值点。
涡流阵列检测中,复杂的检测环境会使得检测结果包含大量噪声。这些噪声使灰度图像模糊,甚至淹没或改变图像特征,给边缘检测和轮廓处理带来困难。中值滤波是一种较少边缘模糊的非线性滤波方法,不仅能够去除或者减少随机噪声和脉冲干扰,还能较好地保留图像边缘信息[12]。中值滤波模板的大小与平滑效果直接相关,模板越大,平滑的效果越明显。但模板过大,一方面会增加算法的耗时,另一方面会造成图像边缘信息的损失,模板的大小要在保证消除噪声和算法实时性的前提下尽可能的保持图像的边缘信息。
为了提取图像轮廓信息,须引入边缘提取算法。边缘检测大致可分以下几类:基于局部图像函数的方法、基于全局的边缘检测方法和图像滤波的方法[13-14]。图像滤波的方法,即先对图像滤波,再对滤波结果作一阶或二阶导数以寻找边缘,其中典型的算法有Robert、Kirsch、Sobel、Prewitt、Canny、Marr-Hildreth、Laplacian 算法及基于小波变换的边缘提取算法等。
边缘轮廓点跟踪就是通过扫描二值边缘图像,将第一个被扫描到得边缘像素作为起点,搜索其八邻域,寻找另一边缘像素,并记录下搜索过的边缘点的空间位置。如其八邻域内无边缘点,说明是孤立点,中止搜索。边缘轮廓经常会出现断点和分叉,因此轮廓跟踪须引入补偿算法[15]。
(3)图像模糊区域的消除
由于涡流阵列传感器线圈单元点扩展函数卷积效应导致裂纹图像模糊,边缘检测算法提取得到裂纹区域的边缘与实际裂纹边缘存在较大差异,该差异可通过提取轮廓跟踪结果所得裂纹长度与§3.2方法所得裂纹长度进行计算。为了消除图形模糊区域,可引入细化算法。
细化又称为骨架化,该算法在保持原图像结构信息的前提下,删除边缘像素,抽取单像素宽度的骨架特征。按照处理过程的迭代方式,细化算法分为串行和并行细化算法。并行细化算法由于具有快速、准确等优点,一直是人们的研究热点。常用的并行细化算法可分为ZS细化算法、LU细化算法、基于神经网络的细化算法等[6,16-17]。
由于细化是为了消除图像模糊区域但并不形成单像素骨架,在细化算法中应加入迭代次数的约束条件。迭代次数Nth可依照下式计算:

式中,Lb和Lf分别为提取轮廓跟踪结果所得裂纹长度和由长度特征提取方法得到的裂纹长度,ΔLS为单次细化算法消减的裂纹长度近似值。
另外,细化之前应对C扫描图像轮廓跟踪结果进行种子填充,否则细化算法效果较差。
(4)裂纹位置差修正
图像裂纹位置与实际裂纹所在位置存在位置差,可通过对图像进行空间变换的方法进行修正。为此,首先必须提取细化处理后含近似边缘信息的二值图像的裂纹长度中心点和宽度中心点。由于细化处理图像无对称性,中心点的提取可以采用的方法较多,本文用二值图像重心近似裂纹中心点,具体计算公式如下:

式中,xbc和ybc分别为细化处理后二值图像中裂纹中心点的近似X和Y坐标,xi和yi分别为二值图像中1值点的X和Y坐标,Kx和Ky分别为二值图像中X和Y方向包含1值点的数量。
结合§3.2节裂纹特征提取方法获得的裂纹长度中心点xfc和宽度中心点yfc修正xbc和ybc,即得到裂纹位置差修正方法:

式中,ξ(x,y)为细化后二值图像的灰度值,ξ'(x,y)经过空间变换后二值图像的灰度值。
4 试验及结果分析
为了验证本文算法,基于图1所示涡流阵列硬件平台和图2所示涡流阵列传感器,应用斜向列检测模式,沿图2所示扫描路径对18 mm×1 mm×0.9 mm裂纹实施检测图像,获得了图4涡流阵列C扫描图像。图5为对图4进行了图像分割和灰度映射所得结果。观察图5可知,原图像经过图像分割和灰度映射后,图像尺寸减小,有用信息基本保留,弱边缘得到极大的加强。

图5 经过图像分割和灰度映射的C扫描图像
用 Robert、Kirsch、Sobel、Prewitt、Canny、Marr-Hildreth、Laplacian算法对中值滤波后C扫描图像进行边缘提取,通过比较提取结果,Canny算法在提取激励检测式阵列传感器C扫描图像边缘信息效果较好,具体结果见图6。图7为经过轮廓跟踪和补偿算法后得到的轮廓曲线,轮廓曲线的获取还可通过对中值滤波后图像进行二值变换和种子填充,但边缘毛刺较多,细化处理较难实施。
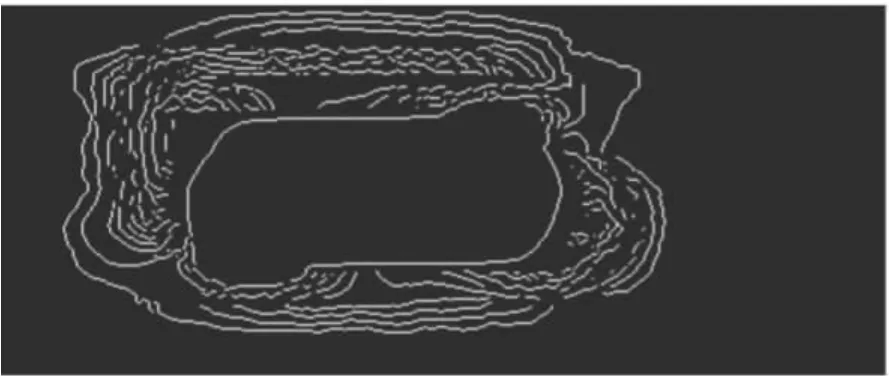
图6 Canny边缘提取算法得到C扫描图像的边缘信息

图7 经过轮廓跟踪和补偿后得到的轮廓曲线
对细化处理后的二值图像进行裂纹位置差修正,将子图像坐标还原至原C扫描图像,二值图像中的数值0点用原图像灰度代替,数值1点转变为黑色区域。将处理结果与原C扫描图进行加法操作后,得到如图8中所示的修正C扫描图像。深度信息的复现可采取两种方法:直接标识或对二值图像的数值1点用子图像强边缘点灰度代替的方法,图8为了突出处理结果采用直接标识的方法。
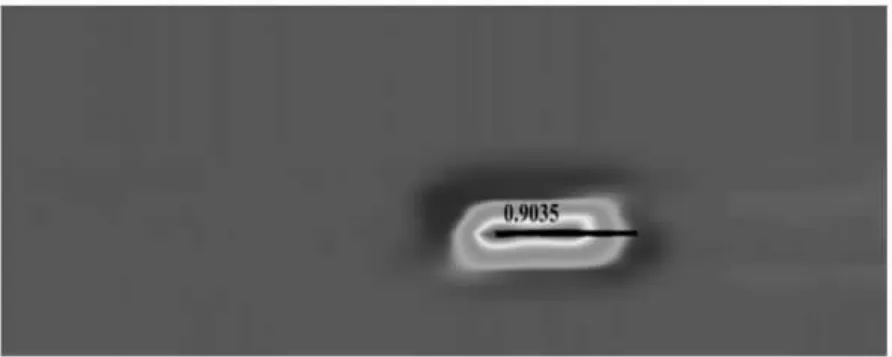
图8 涡流阵列修正C扫描图像
将图4的涡流阵列C扫描图像与图8涡流阵列修正C扫描图像进行对比分析可知,修正C扫描图像作为C扫描成像的一种衍生图像,可以较为准确地定量反映受检件裂纹位置、长度、深度、方向等特征信息,由于去除了缺陷区域图像模糊和修正了缺陷区域与实际缺陷区域存在的位置差,能够有效降低涡流阵列检测的漏检率和误检率,提高检测的速度。
5 结论
本文将涡流阵列特征提取方法和图像方法结合,提出了可以较为准确反映裂纹位置、长度、方向等特征信息的涡流阵列修正C扫描成像,并通过成像过程的算法验证得到如下结论:
(1)基于裂纹特征提取方法对涡流阵列C扫描图像的分割算法在减小图像尺寸的同时,基本保留了待提取的裂纹信息。
(2)Canny边缘提取算法在提取激励检测式阵列传感器C扫描图像边缘信息效果较好。
(3)经过边缘提取、轮廓跟踪和补偿算法提取的轮廓较二值变换和种子填充后的轮廓毛刺较少,更利于细化。
(4)涡流阵列修正C扫描图像能够使检测人员快速识别部件裂纹信息,提高涡流无损检测的可靠性和速度。
[1]Goldfine N,Zilberstein V,Washabaugh A,et al.Eddy Current Sensor Networks for Aircraft Fatigue Monitoring[J].Material Evaluation,2003,61(7):852-859.
[2]Butin L,Wache G,Perez L,et al.New NDE Perspectives with Magnetoresistance Array Technologies-from Research to Industrial Applications[J].Insight,2005,47(5):280-284.
[3]Crouch A E,Goyen T,Porter P.New Method Uses Conformable Array to Map External Pipeline Corrosion[J].Oil and Gas Journal,2004,102(41):55-59.
[4]高印寒,吴定超,李春光,等.涡流实时成像技术的研究[J].仪表技术与传感器,2003,4:44-47.
[5]吴迪,张兆东,韩秀甫,等.通用扫描成像检测软件的开发及应用[J].无损检测,2003,25(8):403-406.
[6]Rao B P C,Baldev Raj,Jayakumar T,et al.A New Approach for Restoration of Eddy Curreng Images[J].Journal of Nondestructive Evaluation,2001,20(2):61-72.
[7]Takagi T,Uchimoto T.Design of An Eddy-Current Array Probe for Crack Sizing in Steam Generator Tubes[J].NDT and E International,2003,36(7):515-522.
[8]张玉华,孙慧贤,罗飞路,等.一种用于盘孔裂纹检测的差动式涡流探头的设计与实现[J].传感技术学报,2008,21(6):1079-1083.
[9]任吉林,刁海波,唐继红,等.涡流传感器提离效应的ANSYS模拟[J].传感技术学报,2008,21(6):967-971.
[10]章毓晋.图像分割[M].北京:科学出版社,2001.
[11]Zhang Y J.A Survey on Evaluation Methods for Image Segmentation[J].Pattern Recognition,1996,29(8):1335-1346.
[12]张明谦,李雷.改进的中值滤波算法[J].兵工自动化,2007(5):77-80.
[13]张凯丽,刘辉.边缘检恻技术的发展研究[J].昆明理工大学学报,2000,25(5):36-39.
[14]尹平,王润生.多尺度边缘检测技术的分类及比较[J].计算机工程与科学,1998,20(1):16-19.
[15]袁野.摄像机标定方法及边缘检测和轮廓跟踪算法研究[D].大连:大连理工大学(博士学位论文),2002.
[16]任传波,吴红.二值图案字符细化的一种算法-神经网络算法[J].小型微型计算机系统,1999,20(3):228-232.
[17]包建军,樊菁.鲁棒的二值图像并行细化算法[J].计算机辅助工程,2006,15(4):43-46.