多维力传感器耦合分析及解耦方法的研究*
2011-10-19曹会彬孙玉香刘利民王以俊葛运建
曹会彬,孙玉香,刘利民,冯 勇,王以俊,葛运建,*
(1.中国科学院合肥智能机械研究所,合肥 230031;2.中国科学技术大学,合肥 230026)
多维力传感器是机器人实现智能化应用最重要的传感器之一[1-4]。根据应用的场合不同,能够设计成不同维数(1维-6维)的传感器,从而测量三维空间的全力信息(3个力分量和3个力矩分量)。由于力传感器在机械设计中要求体积小,结构紧凑、功能强等特点,这同时也带来了多维力传感器的共性问题,即维间耦合问题。消除维间耦合是多维传感器准确测量的核心,也是机器人实现智能化控制的重要前提[5-8]。
目前常用的传感器静态解耦的主要方法[9]:一是基于线性标定的静态解耦算法。假设传感器为线性系统的前提下,通过对六维力传感器各方向进行实验标定,进而确定标定矩阵。二是基于最小二乘法线性拟合的静态解耦算法。根据最小二乘法,依据标定数据进行线性拟合,可得到广义外力各分别单独加载时,力分量与各电桥输出电压之间的线性回归方程[10-11]。
对于多维力传感器的解耦问题并没有统一的处理方法,本文以我们研制的六维腕力传感器为依托,提出了一种基于神经网络的多维力传感器的解耦方法[12]。通过对解耦后数据分析,证实了该方法解耦的可行性和优越性。这样工程实现时可以大大提高机械手的控制精度,满足机器人智能控制的要求。
1 多维力传感器的耦合分析
多维力传感器的耦合从产生的原因上分为两种:结构性耦合和误差性耦合。以我们研制的六维力传感器为例,结构如图1所示(六维力传感器上膜测量三维力矩:Mx,My,Mz;下膜测量三维力:Fx,Fy,Fz)。
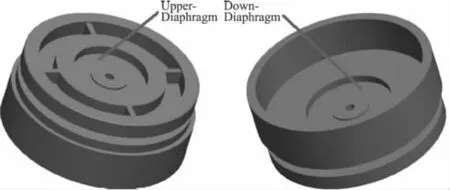
图1 六维力传感器结构图
1.1 结构耦合
结构性耦合产生的原因主要是因为弹性体是一体化结构,在设计上某些方向必然存在耦合,例如Mx(绕X轴的力矩)与Fy(沿Y轴的受力)和My(绕Y轴的力矩)与Fx(沿X轴的受力),其它方向是不存在这种耦合的,这些可以从有限元分析中得到。由于产生的原理相同,存在结构性耦合的以Mx和Fy为例,如图1所示。不存在这种耦合的以Mz和Fx,Fz,Mx为例,如图 2 所示。
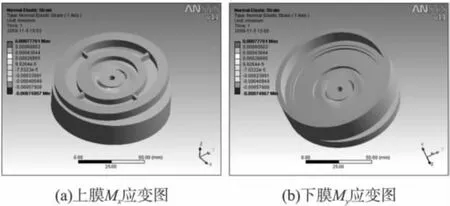
图2 有限元分析图Mx-Fy
从图2(a)可以看出,在上膜施加力矩Mx时,在下膜Fy方向上有明显的应变现象如图2(b)所示。从图3(a)可以看出,在上膜施加力矩Mz时,上膜和下膜没有明显的应变,如图3(b)、3(c)、3(d)所示。
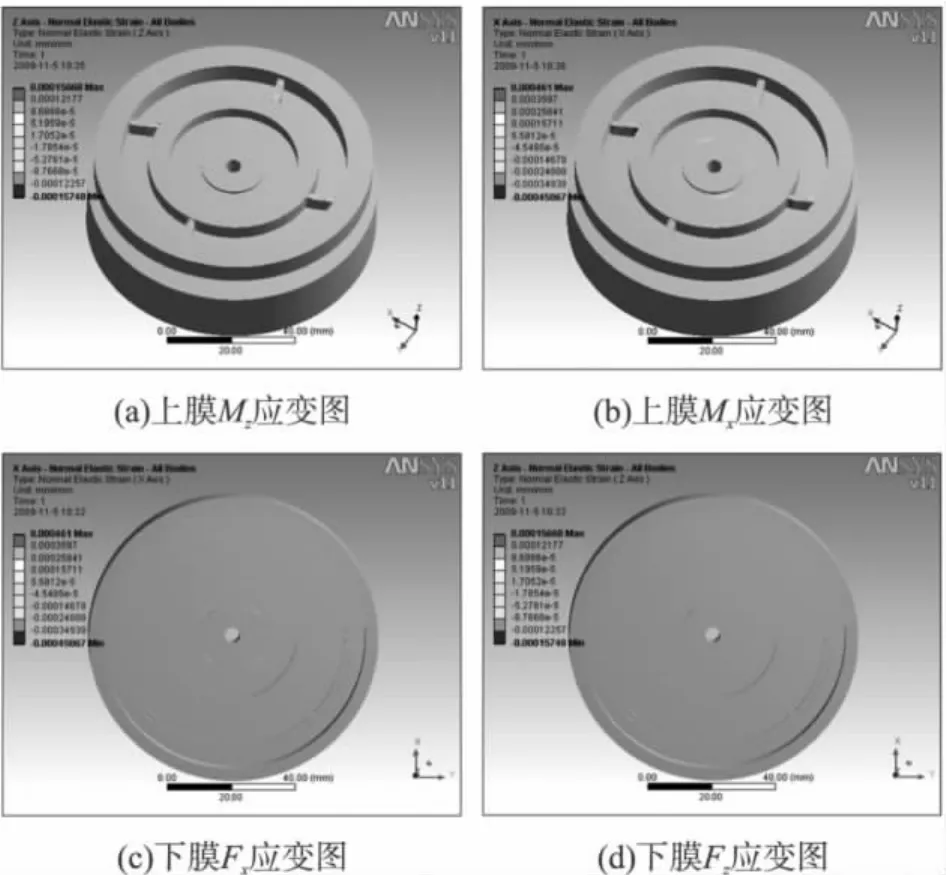
图3 有限元分析图Mz-Mx-Fx-Fz
1.2 误差耦合
误差性耦合产生的原因主要是制造工艺和贴片水平的限制,而误差性耦合在有限元分析中是不存在的,事实上误差性耦合几乎存在于所有的多维力传感器中。下面以研制的六维腕力传感器为例进行分析。
在上膜My施加力矩,方法是同一种力矩施加5次,施加大小为0,6 kg×5 cm,12 kg×5 cm,18 kg×5 cm,其它五维经A/D转换后的数值如表1所示,解耦前后各维数据如图4所示。
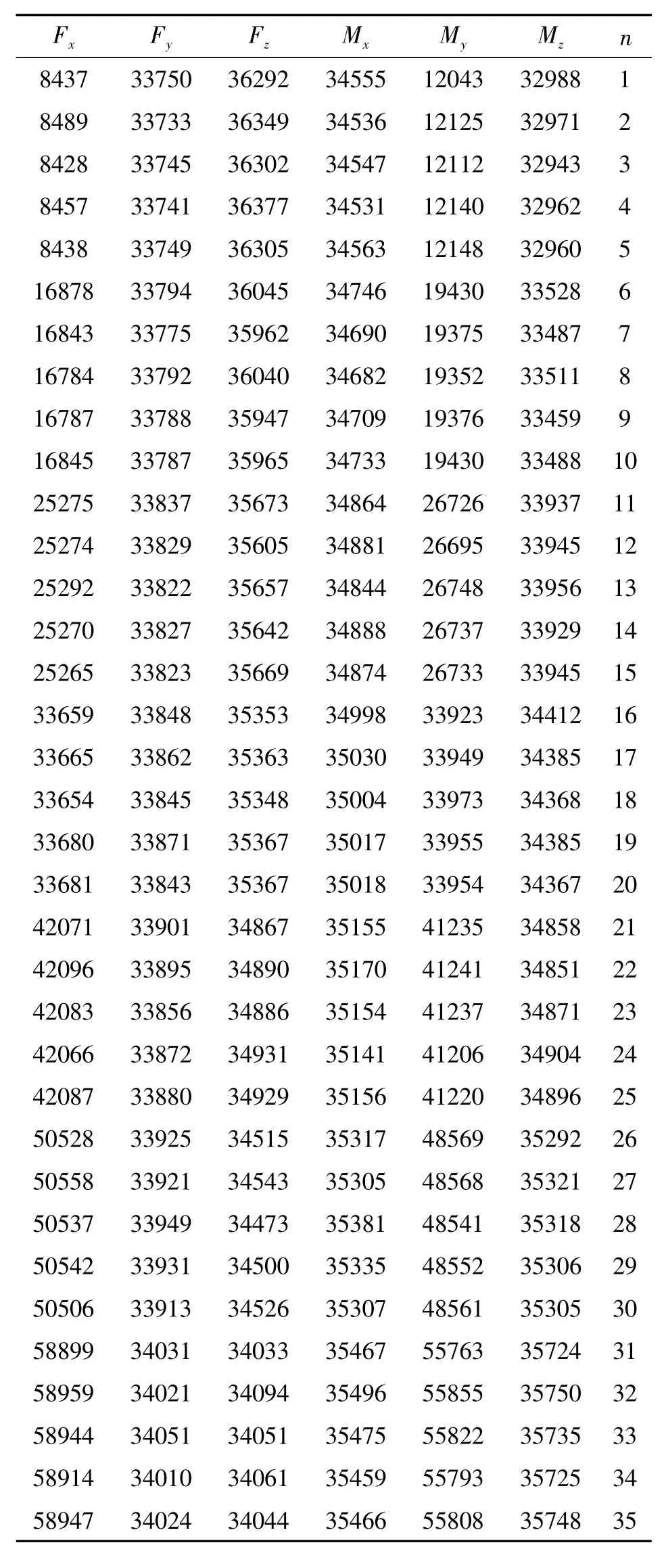
表1 沿X轴施加力测得数据
从表1数据可以看出施加力矩My时,其它五维都有不同程度的输出。存在这结构耦合和误差耦合现象。经过解耦以后,结构耦合和误差耦合都有很大程度的提高,如图4所示。
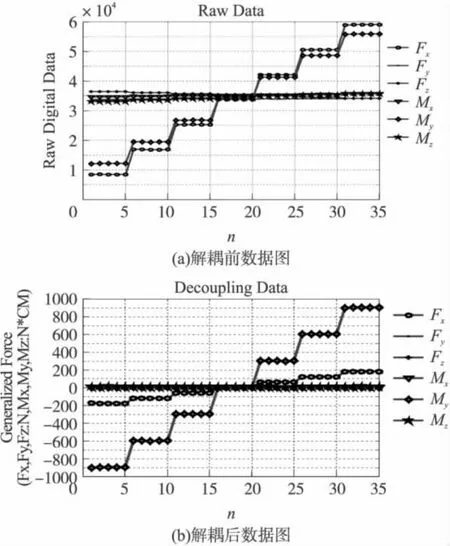
图4 数据关联示意图
2 解耦方法研究
2.1 标定-样本数据
神经网络依靠学习样本来确定网络中的向量W值,一个学习样本是一组输入输出数据。为了使经学习后得到的网络具有更好的性能,也就是说能准确反映输出量和输入量之间的关系,所收集的数据必须包含问题的全部模式,所以我们采用的标定方法与文献[5]相同。
为了确保标定-样本数据的准确性和可靠性,在硬件设计上采用高精度的12位A/D采集的控制器和精密低噪声放大器,软件设计上采用数字低通滤波器(传感器机械频率120 MHz左右)和移动平均法的数据处理方式。
2.2 解耦-网络训练
六维腕力传感器各维之间都存在着耦合,耦合的程度可以用网络的权值来表示,如图5所示。其中Nx,Ny,Nz,Nmx,Nmy,Nmz是在某一方向施加力或者力矩时,经过数据采集卡采集的原始数字量(采集范围是0 ~4 095),Fx,Fy,Fz,Mx,My和Mz是解耦后各维的真实受力数值,w(i,j)(1≤i,j≤6)是网络训练后的权值,表示第j维对第i维的影响程度,也就是耦合度。(1≤k≤6)为偏差矢量。
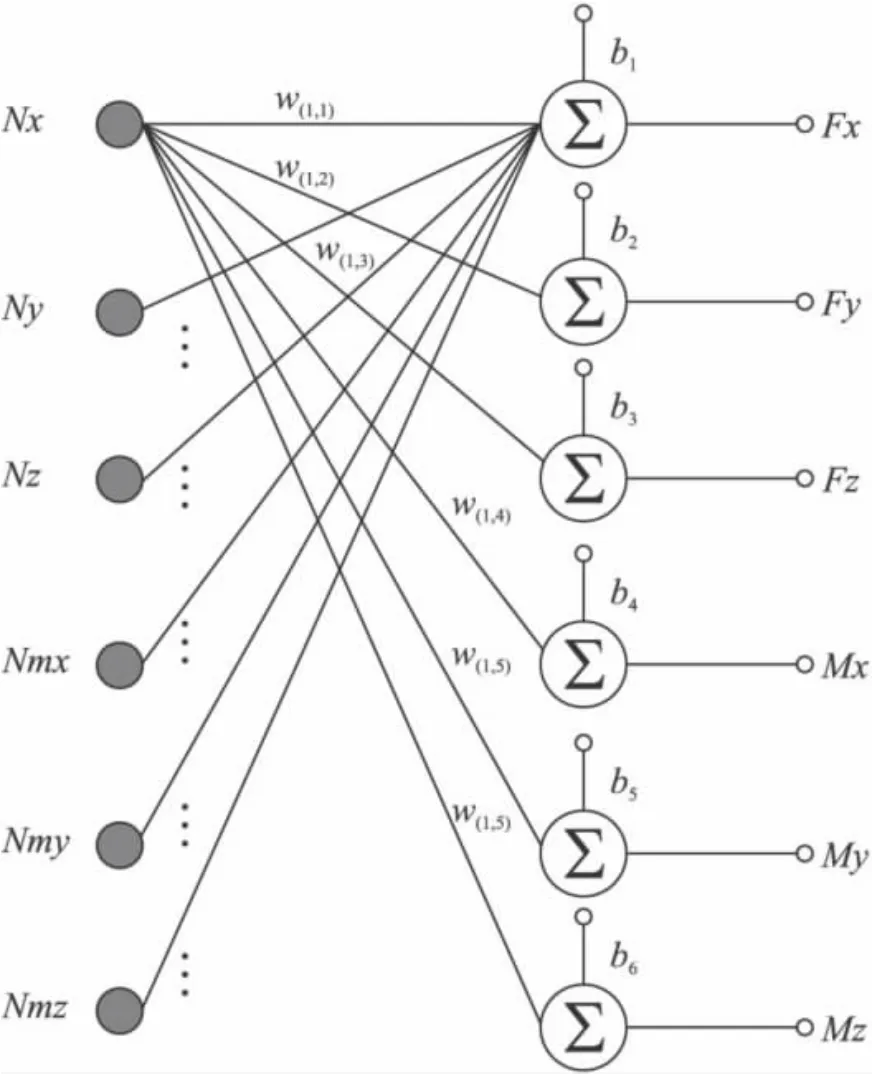
图5 六维网络训练图
在解耦之前通过标定得到加载力和采集数字量之间的关系为:

其中F表示各方向施加的标准广义力(包括沿各轴的力和绕轴的力矩),这里

N表示通过数据采集卡采集到的数字量,这里

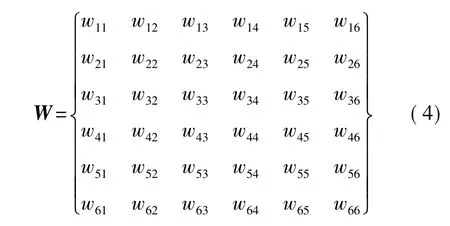
W是一个6×6的解耦矩阵,数据大小表示各维之间耦合的程度。其中主对角线w(i,j)(i=j,1≤i,j≤6)表示在某维单独受力时力与标定数字量的相关系数,其它系数w(i,j)(i≠j,1≤i,j≤6) 表示第j维对第i维的影响程度,即耦合系数。
B是网络训练的偏移量:

神经网络解耦的优势就是能够把所有标定的有效数据进行训练,得到一个最优的解耦矩阵。
解耦算法具体流程如图6所示。
图6 解耦算法流程图
3 实例及分析
以我们研制的一款小量程的六维腕力传感器为例,标定-样本数据见附表1。标定过程以Mx为例如下:
(1)在上膜Mx施加力矩,力大小为6 000 g,力臂距离为5 cm,采集并且保存经过数据卡输出的六路数字量,Fx,Fy,Fz,Mx,My和Mz,采集次数为5次。
(2)增加砝码重量到12 000 g,力臂距离不变,采集并且保存经过数据卡输出的六路数字量,Fx,Fy,Fz,Mx,My和Mz,采集次数不变。
(3)以此类推,最后完成实验,获得标定数据。其它维的标定过程与Mx相同。
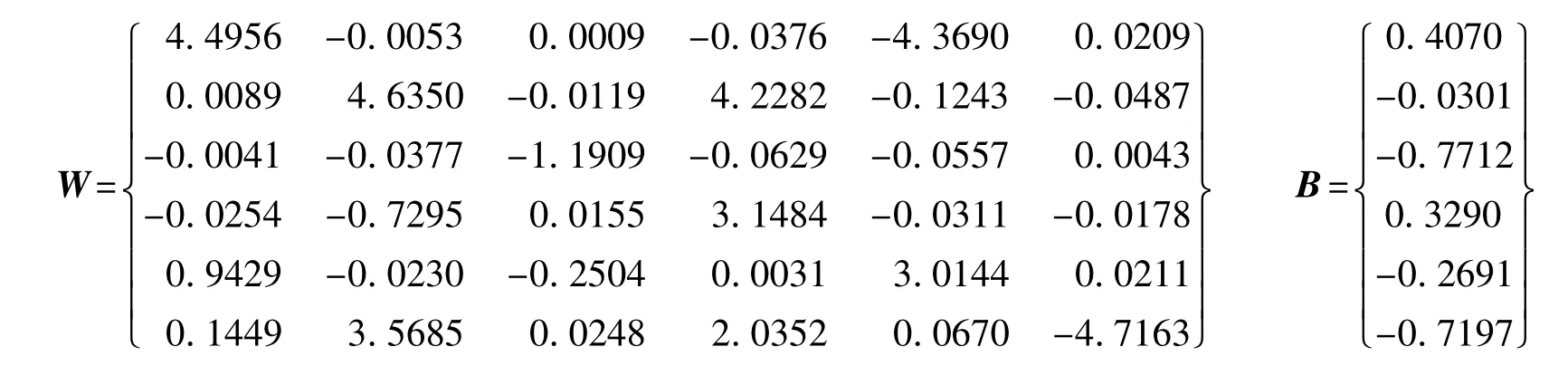
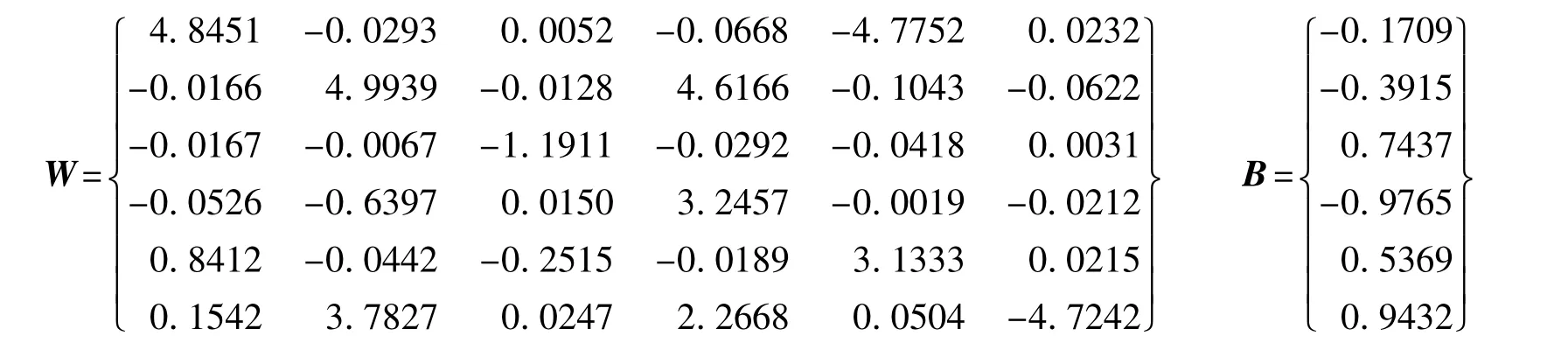
获取标定数据以后,根据3.2解耦-网络训练解耦算法,获取解耦矩阵。在训练过程中,网络训练次数不同,训练的权值和偏差值不同,如下所示。
(a)训练500次后的权值和偏差值
(b)训练700次后的权值和偏差值
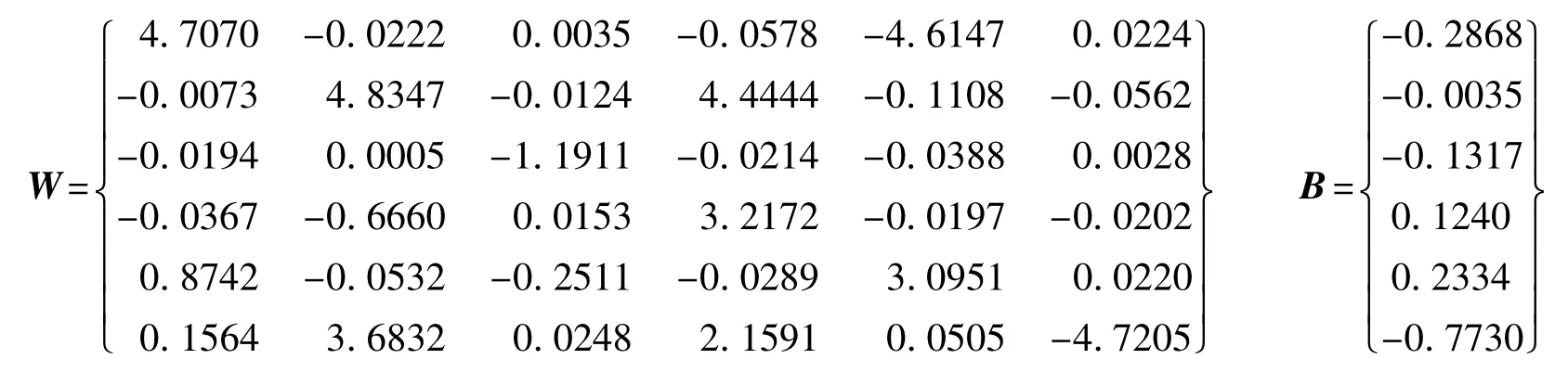
(c)训练1 000次后的权值和偏差值
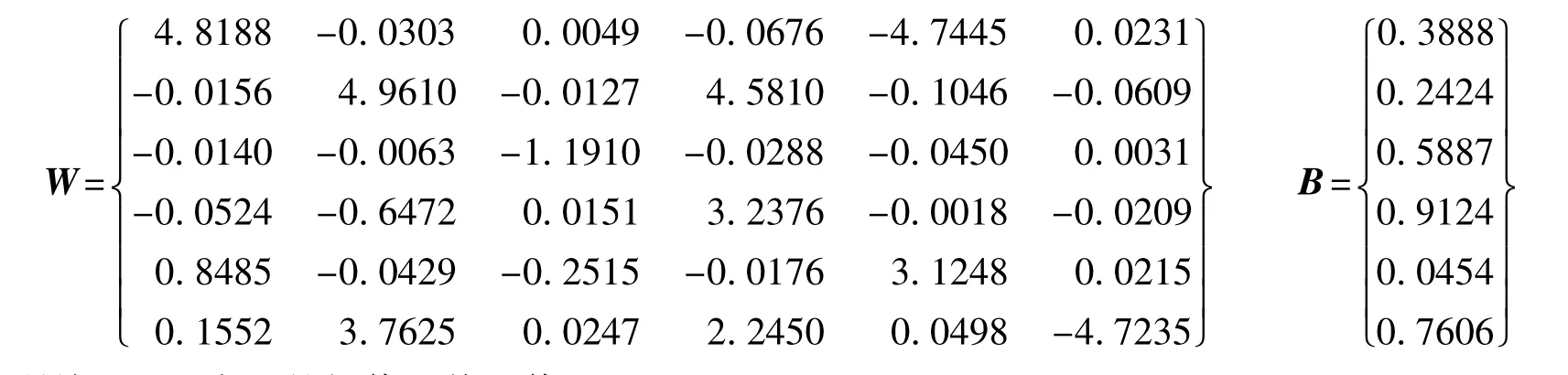
(d)训练3 000次后的权值和偏差值
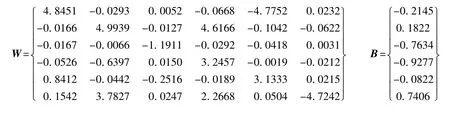
(e)训练5 000次后的权值和偏差值
训练后的误差值也就不同。如表2所示。

表2 不同训练次数的误差和
由传统静态解耦方法[9]得到的方差和为sse=3.5641×105。由表2和表3可知,随之训练次数的增大,权值在变化,精度也在提高。以传统解耦方法为基准点,训练 500、700、1 000、3 000 和 5 000 后,方差和减少了 6.78%、21.23%、24.18%、24.34%、24.33%。总之只要在多维力传感器误差允许的范围内,训练的权值和偏差值都是有效的。
4 结论
力传感器各维之间的耦合程度是由它的结构决定的。如何能够定量的表示各维之间耦合程度是传感器能够应用的重要前提。本文提出的基于线性神经网络解耦方法,是在准确获取样本数据的前提下,利用神经网络的自适应性和学习性进行训练得到网络的权值和偏差值,也就是耦合矩阵。最后通过具体实例验证了神经网络训练的优越性,对以后多维力的工程应用具有重要的指导意义。
[1]Yong Yu,Takashi Chaen,Showzow Tsujio.Hign-Stiffness and High-Sensitivity 3-Axis Force Sensor Using Strain=Deformation Expansion Mechanism,International Conference on Intelligent Robots and System J.Magn.Beijing,China,pp.4417-4422,October,2006,[Proceedings of the 2006 IEEE/RSJ].
[2]Zang Xiaohui,Gao Fen.Design of New-Style Six-Dimension Force Sensors System for Robot Finger[J].Journal of Transducer Technology,2003,22(9):22-25.
[3]Yao Zhihui,Zhang Fuxiang,Chen Hua.Novel Decoupled Six-Axis Robot Sensor[J].Journal of Harbin Institute of Technology,2004,36(2):160-162.
[4]徐科军,李成.多维腕力传感器静态解耦的研究[J].合肥工业大学学报,1999,22(2):1-6.
[5]王建波,吕震中.基于INA的机器人六维腕力传感器的解耦研究[J].测控技术,2002,21(9):5-7.
[6]Jiang Zhaohui,Kohno M R.Robotic Manipulation of Flexible Objects Based on Vibration Control Using Force Sensors[C]//2002 IEEE International Conference on Systems,Man and Cybernetics,Hammamet,Tunisia,2002,4:6.
[7]Jianhe Lei,Liankui.Application of Neural Network to Nonlinear Static Decoupling of Robot Wrist Force Sensor[C]//Proceedings of the 6th World Congress on Intelligent Control and Automation,2006,pp.5282-5285.Martin T Hagan,Howard B Demuth,Mark Beale.Neural Network Design[M].Beijing:China Machine Press,2002.8.
[8]Tommy C P Lo,Philip C H Chan.Design and Calibration of a 3-D Micro-Strain Gauge for in Situ on Chip Stress Measurements[C]//IEEE,ICSE’96 Proc.,1996:252-255.
[9]张景柱,郭凯.六维力传感器静态解耦算法应用研究[J].传感器与微系统,2007,26(12)58-62.
[10]LI Minggang.Calibration and Linerarization Method for Microcontroller—Based Sensor System[J].Measurement& Control,1996,29(1):75-78.
[11]许德章,吴仲城,葛运建,等.机器人六维腕力传感器耦合矩阵的确定与摄动分析[J].仪器仪表学报,2005,26(1):7-11.
[12]丛爽.MATLAB工具箱的神经网络理论与应用[M].中国科学技术大学出版社,2003.