窄带雷达目标特性分析技术在近距离伴飞中的应用
2011-09-21牛威寇鹏,2
牛 威 寇 鹏,2
(1中国西安卫星测控中心 2宇航动力学国家重点实验室)
1 引言
小卫星伴飞是载人航天飞行任务中的一项重要的科学实验活动,伴星及轨道舱轨道测定是完成伴星对轨道舱的伴飞试验的前提条件。雷达是进行空间目标监视的主要设备之一[1],利用雷达对伴星及轨道舱进行反射式跟踪,可为伴飞试验提供数据支持。此时,伴星及轨道舱视为非合作目标。非合作目标的监测与航天测控有所不同,需要考虑目标特性等问题。目前窄带雷达观测非合作目标时主要获取的是测轨和雷达目标反射截面积(Radar Cross Section,RCS)数据,因此我们从轨道和RCS两个方面分析了目标特性,根据分析结果研究了近距离伴飞中目标识别方法,在试验中得到了验证。
2 伴星和轨道舱目标特性分析
2.1 轨道特性分析
描述目标运动轨道的表达方式有轨道根数及目标位置、速度两种[2]。分析目标运动特性时通常基于轨道根数,不同轨道体系定义了不同的轨道根数,本文研究了基于经典的开普勒根数的轨道特性识别技术。
经典的开普勒根数包括目标的半长轴、偏心率、轨道倾角、升交点赤经、近地点幅角、平近点角。其中半长轴、轨道倾角、升交点赤经等为慢变化轨道元素。开普勒根数又分为瞬时根数和平根数,进行识别时需分析目标瞬时位置变化情况[3]。
伴星分离后,对轨道舱和伴星进行了跟踪。由于是非合作式跟踪,需要根据目标特性判别目标身份,因此分析了两个目标的轨道和RCS特性,根据特性分析结果进行了目标身份识别。
(1)基于轨道根数的识别方法分析
根据雷达测轨数据分别计算轨道舱和伴星的轨道根数,表1给出了某时刻轨道舱和伴星在J2000惯性系中的开普勒瞬时根数。由表1可见,轨道舱和伴星轨道的差别已经与定轨误差同量级,因此利用轨道根数对二者进行识别的方法不可行。
(2)基于测站跟踪时序的识别方法分析
我们分析了轨道舱和伴星进入设备视场的时间顺序,希望借助其进行识别。表2给出了两个不同跟踪圈次的轨道舱和伴星的某雷达跟踪预报情况。由表2可见,A时刻,伴星先进入设备视场,B时刻,轨道舱先进入设备视场,因此利用测站跟踪时序对二者进行识别的方法也不可行。
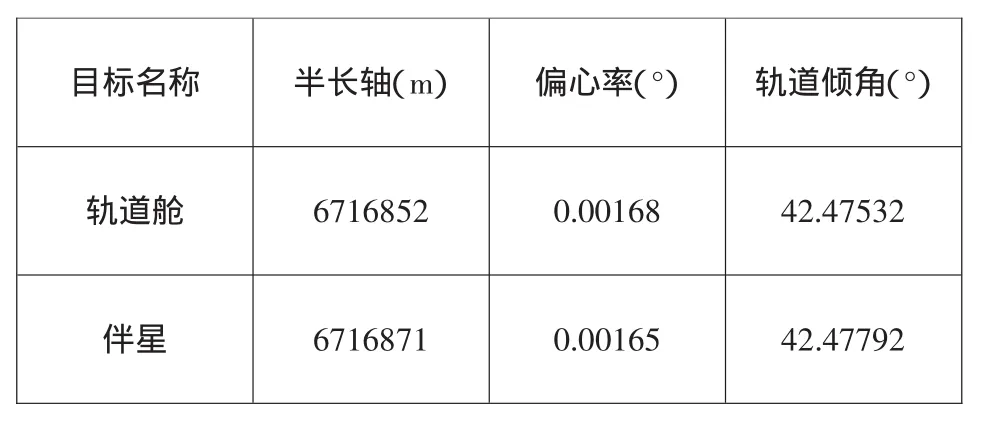
表1 轨道舱和伴星根数瞬时根数
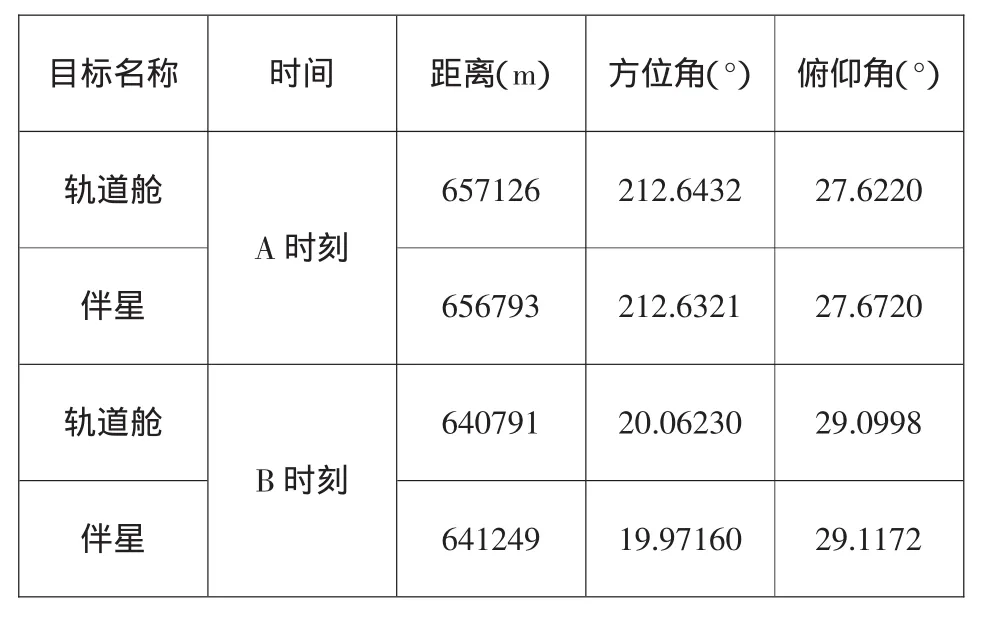
表2 轨道舱和伴星测站跟踪预报情况
2.2 目标RCS特性分析
根据目标物理特性分析,伴星RCS均值远小于轨道舱RCS均值。根据目标运动特性分析,伴星为姿态稳定目标,轨道舱为姿态翻滚目标。伴星RCS均值预估结果小于1m2,轨道舱RCS均值预估结果大于1m2。
根据以上分析,当不能通过轨道特性区分伴星和轨道舱时,可以通过目标RCS特性进行识别,方法如下:
(1)计算目标RCS均值;
(2)利用RCS起伏特性判断目标姿态。
判据:目标RCS均值小于1m2且姿态稳定,识别为伴星;目标RCS均值大于1m2且姿态翻滚,识别为轨道舱。其中稳定性判别是关键技术,下节对算法进行详细描述。
3 稳定性判别算法
由于周期性的翻滚使得目标的RCS反射图具有明显的周期性,与卫星三轴稳定姿态的RCS反射图有明显区别。可以提取反射图的特征量进行分类识别[4]。直接提取RCS反射图的方差、最大值和均值比、变异系数等特征量进行识别的效果并不理想。对RCS反射图进行小波变换,提取小波变换后的各种特征进行了分析,经过大量实测数据验证,发现小波变换后两类目标的最大奇异值、最大值和均值比、方差、中心矩等特征具有可分性,利用这些特征能够进行分类识别,试验表明小波变换后的识别结果较好。下面对利用小波变换的识别算法进行说明。
3.1 利用小波变换的特征提取
选择对尺度参数a和时间参数b进行离散化,设窄带雷达 RCS数据x(n),n=0,1,…,N,N为雷达观测数据的长度,则x(n)的离散小波变换为

其中,b=1,2,…,N;a=1,2,…,M。令,选取由A提取的7个有效统计特征如下:
(1)最大值和均值之比特征

(2)最大奇异值特征
将A看作维矩阵,则分别存在一个M×M维和N×N维酉阵U和V,使得A=UΣVH,其中上标H表示矩阵的共轭转置,Σ是一个M×N维对角矩阵,其主对角线上的元素是非负的,并按下列顺序排列:σ11≥σ22≥…≥σhh≥0,式中h=min(M,N)。则最大奇异值特征为:

(3)方差特征
方差特征为:

(4)中心矩特征

分别令(p,q)=(2,2)、(2,4)、(4,2)、(4,4),可以提取中心矩特征t4=u22,t5=u24,t6=u42,t7=u44。
3.2 神经网络判别
考虑到分类识别和工程应用的需求,试验选取了算法简单,便于实现的BP(Back Propagation)神经网络。由于提取的7种小波变换特征值之间相差较大,直接作为BP神经网络的输入,网络不收敛。根据实际情况,对特征值进行了归一化处理,使用归一化处理后的特征值进行识别,使用基本的BP神经网络算法就可以达到较好的识别效果,网络收敛速度较快。
使用BP神经网络首先需要对其进行训练,使其通过对一定数量的样本数据进行学习后,具备识别新样本数据的能力。实验中选取三层BP神经网络,设输入层有n个神经元,隐含层有p个神经元,输出层有m个神经元,根据特征提取结果和识别要求,取n=7,p=5,m=2。xi表示输入层第i个神经元,yh表示隐含层第h个神经元,zj表示输出层第j个神经元,wih表示输入层第i个神经元和隐含层第h个神经元之间的连接权值,whj表示隐含层第h个神经元和输出层第j个神经元之间的连接权值。
隐藏层第h个神经元的输入为:
其中,θh为结点门限。
隐藏层第h个神经元的输出为:

采用S形压缩函数:

输出层第j个神经元的输入加权和为:

输出层第j个神经元的输出为:

误差函数采用:

其中,tj为要求的理想输出。
为使误差函数值最小,用梯度下降法求得优化的权值。权值修正量先从输出层开始修正,然后依次修正前层权值。网络任意层的连接权值修正量可以写成如下一般形式:

其中,yp代表输入端点实际输入,δq表示输出端点的误差。δq的含义由具体的层决定,η为训练速率。
4 试验结果
跟踪试验中对目标特性进行了分析,部分结果如下:
4.1 轨道舱特性测量和分析结果

表3 B型号雷达跟踪目标RCS均值计算结果

图1 A型号雷达RCS时间序列曲线
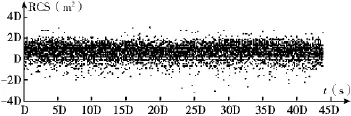
图2 B型号雷达RCS时间序列曲线
稳定姿态结果设为0,翻滚姿态结果设为1,取两类目标输出中值0.5为阈值。
根据RCS均值计算结果和姿态识别结果判断,跟踪目标为轨道舱。

表4 A型号雷达RCS序列识别结果

表5 B型号雷达RCS序列识别结果
4.2 伴星特性测量和分析结果

表6 B型号雷达跟踪目标RCS均值计算结果

图3 A型号雷达RCS时间序列曲线
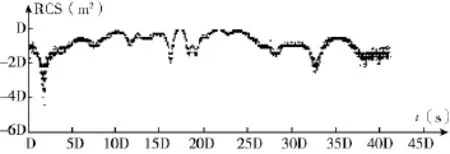
图4 B型号雷达RCS时间序列曲线
稳定姿态结果设为0,翻滚姿态结果设为1,取两类目标输出中值0.5为阈值。
根据RCS均值计算结果和姿态识别结果判断,跟踪目标为伴星。

表7 A型号雷达RCS序列识别结果
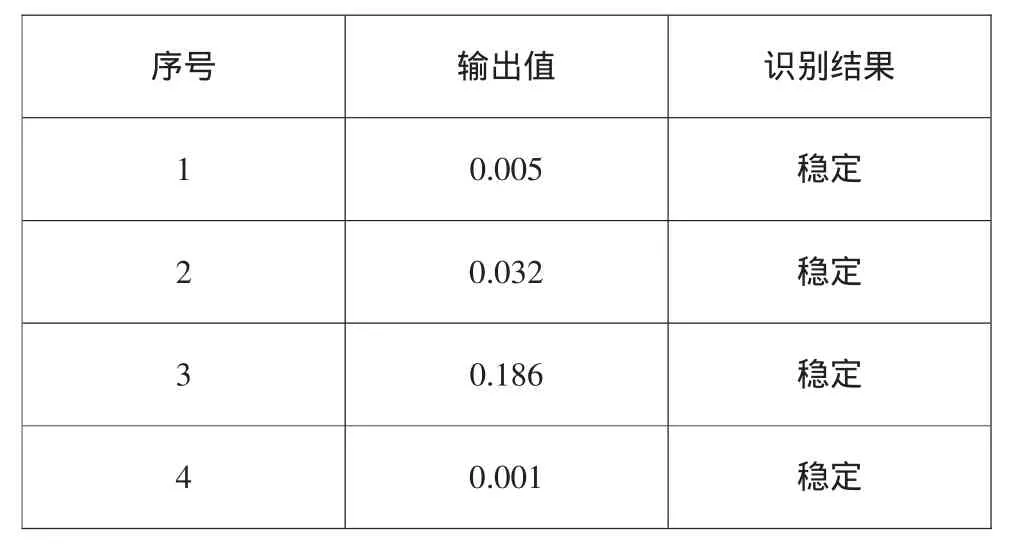
表8 B型号雷达RCS序列识别结果
5 结论
近距离伴飞实验中,由于伴星和轨道舱目标相对距离较近,两目标进入设备视场的时间顺序也不能确定,导致常用的轨道根数和测站跟踪时序识别法不能对两者加以区分。本文通过分析目标的物理特性及姿态特性,提出了使用RCS均值及姿态稳定判别的识别方法,识别出伴星和轨道舱。但是窄带雷达不能得到目标的细节信息,后续工作将利用不同类型雷达的特性测量结果,进一步研究空间目标的融合识别方法,更好的为我国航天试验服务。
[1]柳仲贵.近地空间目标监视网设计[J].飞行器测控学报,2000,19(4):9-17.
[2]李济生.人造卫星精密轨道确定[M].北京,解放军出版社,1995:76-78.
[3]Qisheng Sui,Jianping Yuan,Wei Niu,and Li Shaoming.A Method of Space Object Recognition Based on Threshold Estimating[C],ISSCAA2010,Haerbing,China,pp.838-840,6.8-6.10,2010.
[4]Wei Niu,Shaoming Li,Rongzhi Zhang.Method for Determining Spacecraft Attitude Stability based on RCS[C].61st International Astronautical Congress,Prague,Czech Republic,IAC-10-A6.1.3,9.27-10.1,2010.