航天员出舱泄压过程飞船精密轨道确定方法
2011-09-21李远平
李远平
(中国西安卫星测控中心)
1 引言
神舟七号载人飞船任务是我国载人航天工程第二步的首次任务,其目的是验证、突破和掌握航天员出舱活动技术。飞船采用三轴稳定对地定向的姿控控制模式,利用圆锥扫描式红外地平仪、数字式太阳敏感器和速率积分陀螺仪进行姿态测量,使用小推力的姿控喷气发动机产生控制力矩。出舱前的气闸舱泄压、航天员舱内和舱外活动会使飞行姿态产生8°以内的扰动,气闸舱泄压和姿控力都会使飞船轨道产生明显的摄动。如果采用传统的轨道确定方法,不考虑姿控力和气闸舱泄压力的作用,飞船轨道确定精度会大大降低。因此,需要在飞船精密轨道确定方法中增加姿控力和气闸舱泄压力的估值模型,保证长时间连续扰动过程中的轨道确定精度。
2 飞船气闸舱泄压过程分析
在神舟七号飞船运行第28圈,2008年9月27日13时45分00秒,姿态控制系统切换为出舱活动控制模式。
在第29圈,15时26分49秒,气闸舱压力为97.2kPa,打开气闸舱泄压阀,开始第一阶段泄压。15时27分54秒,气闸舱压力为70.2kPa,第一阶段泄压结束,开始航天员服装大流量冲洗。15时34分50秒,大流量冲洗结束,气闸舱压力升高至78.2kPa,随后航天员吸氧排氮。16时15分09秒,气闸舱压力为78.2kPa,再次打开气闸舱泄压阀,开始第二阶段泄压。16时37分43秒,气闸舱压力为0.6kPa,气闸舱泄压基本结束。16时39分27秒,气闸舱压力为0.1kPa,气闸舱泄压完全结束。16时41分07秒,气闸舱舱门完全打开。
气闸舱泄压期间地面测控通信覆盖示意图见图1。
气闸舱泄压期间舱内压力变化见图2。

图1 气闸舱泄压期间地面测控通信覆盖示意图

图2 气闸舱泄压期间舱内压力变化
3 飞船姿态控制力建模
在飞船三轴稳定对地定向飞行期间,姿态控制力由推进舱上安装的12台小推力发动机提供,单台额定推力为28N。这些姿控发动机分别控制飞船俯仰轴、偏航轴和滚动轴的姿态运动,每个轴又分为正向力矩控制两台和负向力矩控制两台。
飞船推进舱姿控发动机安装方向示意图见图3。
在图 3 中,Fφ+为俯仰正向姿控力方向,Fφ-为俯仰负向姿控力方向,Fψ+为偏航正向姿控力方向,Fψ-为偏航负向姿控力方向,Fθ+为滚动正向姿控力方向,Fθ-为滚动负向姿控力方向。

图3 飞船推进舱姿控发动机安装方向示意图
因为这些姿控发动机的喷气状态是随机出现的,姿控力的估值又不可能按很多次的控制脉冲来求解,因此,把飞行轨道划分为若干个弧段,对每个弧段内的平均姿控力进行估值。由于飞船姿态角存在8°以内的偏差,导致每个姿控发动机所产生的推力都会存在沿飞船当地轨道坐标系三个轴方向的分量。因此,把姿控力的估值分解为沿飞行轨道径向(R)、切向(T)、法向(N)三个方向的分量。
4 飞船气闸舱泄压力建模
在神舟七号飞船气闸舱的前锥面上方设计有泄压口,舱内气体沿泄压口方向喷出,使飞船产生反方向的泄压力。气闸舱泄压方向示意图见图4。

图4 气闸舱泄压方向示意图
气闸舱泄压力与舱内压力和泄压口有关,在泄压过程中近似呈指数曲线递减变化,其估值模型为

式中,F为泄压力大小;F0为初始泄压力;k为泄压指数;t为泄压过程时刻;t0为泄压开始时刻。
5 飞船精密轨道确定方法
5.1 轨道动力学模型
飞船运行轨道高度约为343km,能使定轨轨道位置误差大于1m量级的摄动因素包括:地球非球形引力摄动、大气阻力摄动、太阳引力摄动、月球引力摄动、地球潮汐摄动和太阳光压摄动[1]。在航天员出舱泄压的长时间连续扰动过程中,姿控力和气闸舱泄压力会使飞船轨道产生明显的摄动,其影响不容忽视。因此,在轨道动力学模型中,需要考虑上述摄动因素,地球引力场采用EGM96(160阶)模型,大气密度采用MSISE-90模型,以保证轨道计算精度。
采用位置矢量r和速度矢量作为变量,运动方程为初值问题

右函数a可分为a0和aε两部分

a0为二体问题下飞船的加速度,aε为其他各种摄动加速度之和,aε可表示如下:

aNS为地球非球形引力摄动加速度,aNB为太阳、月球引力摄动加速度,aSR为太阳光压摄动加速度,aDG为地球大气阻力摄动加速度,aET为地球潮汐摄动加速度,aAC为姿控喷气摄动加速度,aPR为气闸舱泄压摄动加速度。
5.2 轨道估值模型
采用最小二乘法进行轨道改进。[2]设观测数据为(m 维观测向量),被估参数的真值为(n 维被估向量包括轨道参数、多组姿控力和一组气闸舱初始泄压力及泄压指数),则有


设的初值为,略去的高阶项,将Z()线性化,可得

其中,H为观测向量对历元时刻状态矢量的偏导数矩阵。可得:




上式称为法方程,由此可以解得



其中,σj为上次计算的均方根误差、σj+1为当前计算的均方根误差。

迭代过程中,误差大于3σ的观测数据被剔除。
6 飞船精密轨道确定结果
在航天员出舱活动之前,神舟七号飞船气闸舱的第二阶段泄压过程持续时间较长,气闸舱压力变化范围较大,姿控较为频繁。下面给出这一过程的飞船轨道确定结果。
使用2008年9月27日16时09分56秒至16时43分10秒的飞船测轨数据进行轨道确定,不考虑姿控力和气闸舱泄压力的影响,测轨位置数据初步定轨结果见表1,初步定轨残差见图5,定轨位置残差统计结果:X分量为13.5m,Y分量为8.9m,Z分量为28.9m,位置残差统计量为33.2m。
考虑姿控力和气闸舱泄压力的影响后,精确定轨结果见表2,姿控力估值结果见表3,气闸舱泄压力估值结果见表4,精确定轨残差见图6,定轨位置残差统计结果:X分量为5.1m,Y分量为4.0m,Z分量为1.9m,位置残差统计量为6.8m。

表1 第二阶段泄压前后初步定轨结果

表2 第二阶段泄压前后精确定轨结果
对比表1和表2,轨道半长轴相差372 m。第二阶段泄压持续时间长,对轨道扰动较大,是否进行姿控力和气闸舱泄压力估值对定轨结果影响很大。
对比图5和图6可以发现,在飞船精密轨道确定过程中进行姿控力和气闸舱泄压力估值后,定轨残差明显减小。
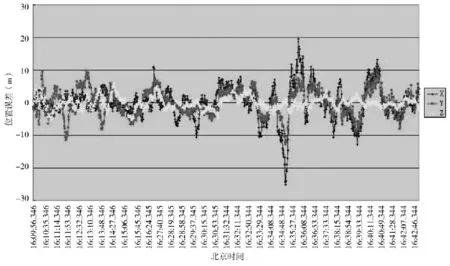
图5 第二阶段泄压前后初步定轨残差

表3 第二阶段泄压前后姿控力估值结果

表4 第二阶段泄压前后轨道舱泄压力估值结果

图6 第二阶段泄压前后精确定轨残差
7 结论
在航天员出舱前安排飞船气闸舱多次泄压,飞船受到扰动,姿态控制力和气闸舱泄压力会使飞船轨道产生明显的摄动;采用传统的轨道确定方法,不考虑姿控力和气闸舱泄压力的作用,飞船定轨位置残差大于30m(1σ);在飞船精密轨道确定方法中增加了多组姿控力和一组气闸舱泄压力的估值模型,可以使长时间连续扰动过程中的定轨位置残差小于10m(1σ),飞船轨道确定精度明显提高。 ◇
[1]李济生.人造卫星精密轨道确定.解放军出版社,1995年7月
[2]刘林.航天器轨道理论.国防工业出版社,2000年6月