基于被动式PD控制策略的“双水舱”减摇系统研究
2011-06-07金鸿章张宏瀚
金鸿章 , 张宏瀚
(1哈尔滨工程大学自动化学院,哈尔滨 150001;2船舶控制工程教育部工程研究中心,哈尔滨 150001)
1 引 言
减摇水舱是一种广泛实用的船舶横摇减摇装置,已经有100余年的应用历史,利用合理设计的减摇水舱可以在船舶谐摇频率范围内提供良好的减摇效果。但在实际航行中,由于船舶航行状态的变化或装载的变化,船舶横摇的固有频率以及海浪的干扰频率常常发生变化,因此单一的被动式水舱很难有效地调频适应[1-4]。为使水舱在更宽的频率范围内能够有效减摇,一种在结构上同时设置两个或多个质量较小的减摇水舱的多水舱减摇系统得到了广泛的研究。2003年,Youssef等利用六自由度的非线性船舶运动模型分别对由一个、两个和三个被动式水舱组成的减摇系统进行研究,通过仿真验证“三水舱”减摇系统具有相对最好的减摇效果[2]。2009年,Osama对Youssef的模型进行了改进,并利用主动式控制方法对“三水舱”系统做出进一步的研究,认为主动式控制和被动式控制的“三水舱”系统都能够对船舶有效减摇并避免船舶的参数横摇发生,且主动式控制效果要远好于被动式水舱[3]。国内,陈放等在2003年将参数频率响应法应用于双水舱系统的船舶横摇响应求解,并分析了水舱特性参数对船舶横摇响应的影响[4]。2007年,金鸿章等对双水舱系统的参数设计方法及优化进行了研究与仿真[5];贲成华等提出了由两对减摇鳍、双被动式减摇水舱和抗静倾平衡水舱组成的综合减摇系统,并通过仿真验证了该综合系统的优越性[6]。
可以看出,目前对多水舱减摇系统的研究主要集中在被动式和主动式水舱系统,被动式多水舱系统虽然减摇频率范围较宽,但是在某些频率范围内,特别是低频范围的减摇效果不如单一的被动可控式水舱。而主动式水舱在快速改变大流量的技术上存在一定的困难,特别是能量消耗很大,在经济上很不合算,实用性较差。本文针对由两个被动可控式减摇水舱组成的双水舱系统进行研究,利用控制理论的方法研究并分析“船舶—双水舱”物理系统,分别以不同的反馈信号被动控制两个水舱内液体运动,使“双水舱”物理系统形成PD式控制反馈,克服单一被动可控式减摇水舱相位控制中的存在的问题,在不增加水舱容量的情况下,增加水舱系统的减摇效果。
2 “船舶—双水舱”系统数学模型
对于装备多个具有不同固有频率减摇水舱的船舶,“船舶—水舱”系统运动方程的推导类似于单个水舱的情形。考虑具有两个减摇水舱的情形,两个水舱的参数使用相同的符号,以下标1和2区分。根据水舱内水流运动是一元流线的假设,“船舶—双水舱”系统的运动可用三个坐标描述,根据查德惠克—克劳托U型减摇水舱理论,取水舱内液体表面在移动后相对原静水面的角度δ和船舶横摇角φ作为系统的广义坐标,利用拉格朗日方程可得“船舶—双水舱”系统的微分方程为[4]
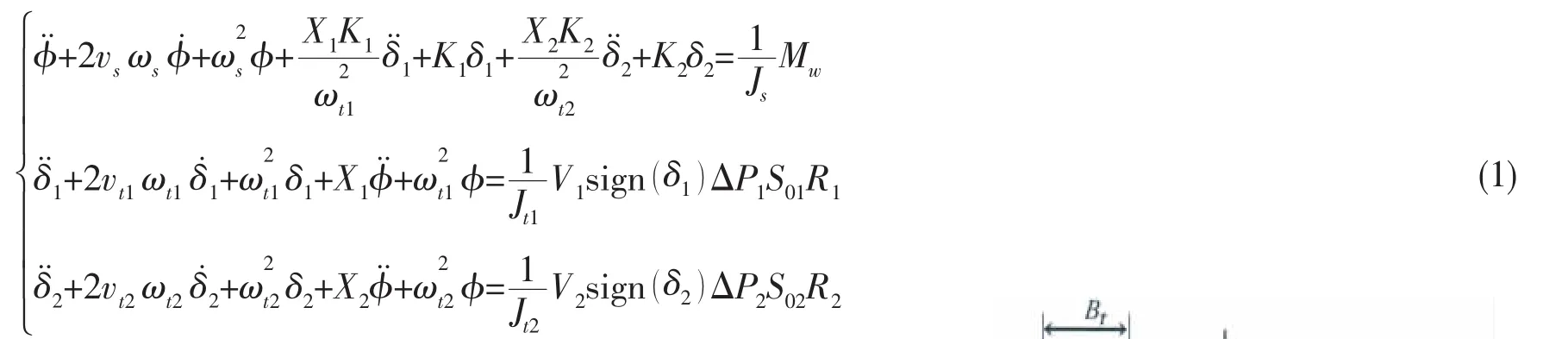
其中:Js为计入水舱内液体质量的船舶横摇质量惯性矩;Jt1、Jt2分别为两水舱内液体的横摇质量惯性矩;vs、vt1和vt2分别为船舶横摇阻尼系数和水舱液体振动阻尼系数;ωs、ωt1和ωt2分别为船舶横摇固有频率和水舱液体振动固有频率;Mw为海浪的横摇干扰力矩;Vi为控制函数,当阀门关闭时,Vi=1,当阀门开启时,Vi=0;Ri为边舱中心至船纵中剖面的水平距离;Soi为边舱自由液面的面积;sign(.)为符号函数。
水舱结构参数及位置布置情况如图1所示。水舱的固有频率与水舱结构设计有关[7]:

图1 U型减摇水舱在船中的垂向布置Fig.1 Vertical arrangement of U-tube tank in the ship

式中:Kt1、Kt2分别为两水舱内液体振荡的恢复力矩系数;Bt为边舱宽度;Lt为水舱沿船长方向长度;h为水舱水平放置时,底部连通道中心线到边舱自由液面的垂直距离;ht为水舱底部连通道高度,g为重力加速度。
参数Xi可由下式计算[8]:

其中:Jst1、Jst2分别为船舶和两水舱的耦合横摇惯性矩;S0为减摇水舱边舱截面积;S为水舱底部连通道截面积;KCR为船舶横摇中心CR到水舱底部连通道中心线的垂直距离,规定中心线在横摇中心以上时,KCR为正值;反之,KCR为负值。由(3)式可以看出,参数Xi与水舱在船舶上垂直位置布置有关。
参数Ki的计算公式为

式中:ρ为舱内液体的密度。若边舱高度和R固定不变,Ki越大,则表明S0越大,也就是说水舱的减摇能力越大。可见Ki是表征水舱减摇能力的参数。
3 双水舱减摇系统控制策略研究
根据减摇水舱的减摇原理,安装减摇水舱后,水舱内的液体流动产生的减摇力矩起到了增加船舶横摇阻尼力矩的作用,当船舶横摇角度与水舱内液体运动的相位差为π/2,即船舶的横摇角速度与舱内液体振动反相时,船舶阻尼力矩增加得最大,这时减摇效果最佳。按照最佳控制相位的要求,如何确定气阀关闭和开启的时刻,最大限度地发挥可控被动式减摇水舱的减摇能力,是控制水舱内水流运动的关键因素。
可控被动式水舱通过获得水舱内最大的水容积,就可以获得最大的减摇力矩,当水舱内液体流动速度为零或水舱液位到达舱顶时,关闭气阀;当水舱气阀关闭后,下面的问题就是如何确定开启阀门时刻,被动可控式水舱的减摇效果主要取决于正确的开启气阀时刻。传统的可控被动式减摇水舱选择在船舶开始扶正时开启气阀,即以船舶横摇角速度为反馈信号,当横摇角速度为零时开启气阀。
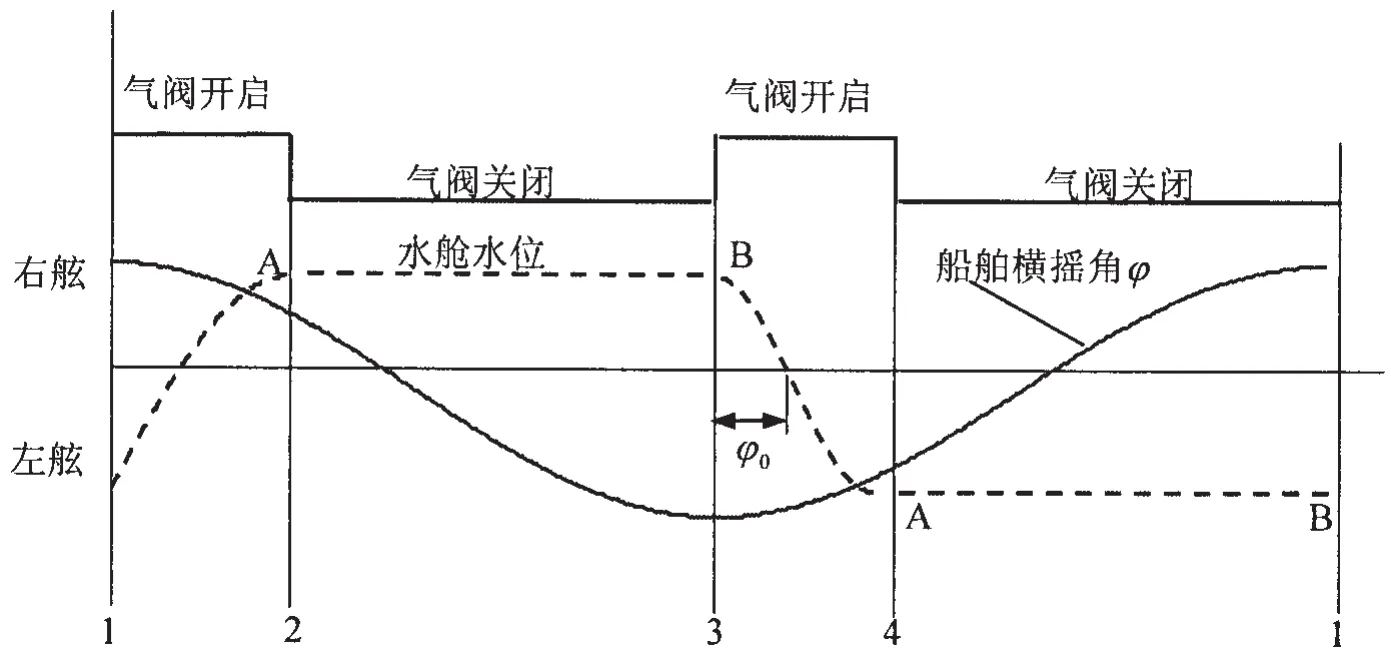
图2 被动可控式减摇水舱相位时序图Fig.2 Time history of phase of a passively controlled tank
由图2可以看到,由于水舱内流体存在惯性滞后,这种开启气阀策略不能保证船舶横摇运动与水舱内流体运动相位差为π/2。假定在规则波的作用下,船舶横摇角度可以表示成:

式中φ0为船舶的横摇振幅。则利用图2所示控制策略控制水舱内液体运动可表示为

式中,δ0为水舱内液体运动角度幅值;φ0为实际水舱内液体运动与液体最佳运动方式之间的相位偏差。
分别用船舶横摇角速度信号和角度信号作为反馈信息控制水舱1和水舱2,利用图2中方法控制气阀开闭,当信号值过零时打开气阀,使水舱1中液体流动和船舶横摇角速度保持反相位,水舱2中液体流动与船舶横摇角度保持同相位。根据上面分析可知,由于水舱液体运动惯性,利用图2气阀开启策略控制水舱内液体运动,水舱1和水舱2中液体运动均滞后控制信号φ0,且水舱2中液体运动超前水舱1中液体运动π/2相位:

由(1)式可知,水舱对船舶的横摇作用力矩可表示为

根据(8)、(9)式和(10)式可知,通过对水舱系统参数 Xi、Ki及 ωti的设计,可以对 φc进行调节,当 φ0=φc时,双水舱系统对船舶横摇作用力矩与船舶横摇角速度反相,此时水舱系统的作用效果完全表现为船舶的横摇阻尼力矩,系统实现最佳减摇效果。由(7)式和(8)式可以看出,减摇系统对船舶产生的横摇力矩Mt实际为船舶横摇角和横摇角速度反馈信号的线性叠加,即由两个水舱组成的双水舱系统在“船舶—双水舱”闭环系统中起到了PD控制器作用,形成了一个被动式PD反馈控制系统。
4 双水舱减摇系统参数设计
水舱距船舶的重心较远时,可以得到较大的复原力臂,由舱内液体引起的横摇复原系数增量也就越大。安装减摇水舱后,还将使船舶横摇固有频率减小,在横摇中心附近,固有频率变化量相对较小。水舱离横摇中心越远,固有频率减小量也越大;纵向和垂直尺寸应根据要求和允许而定,尺寸越大水舱起到的效果越好。所以本文将两个水舱均布置在上层甲板的船桥处,这样除了增加力臂之外,对于相同的横稳心高损失,可以减小所需要水舱的尺寸[7,9]。
可控被动式减摇水舱的作用相当于通过气阀控制延长了水舱内液体运动的周期,缩短了水舱中水流频率,也就是说,只有船舶的横摇频率小于水舱固有频率时,自动控制系统才能发挥作用,因此在进行水舱设计时,不能按被动式减摇水舱的双共振原理选取水舱的固有频率,应使水舱固有频率尽量大于船舶固有频率。由(3)式可知,水舱频率越大,则要求连接水舱两边舱的连通道尺寸越大,从而要求的水量也越大,而这些增加的水量并没有起到增加减摇效果的作用。因此水舱频率的设计应权衡各方面因素,根据船舶最大横摇角、运行海域等设计需求进行选取。本文选择有义波高6m海情下船舶谐摇频率ωφ的1.6倍作为两个水舱的固有频率:

水舱内的流体运动是一个近似的二阶振荡运动,对于二阶振荡系统,当阻尼比较小时,系统的有阻尼固有频率与无阻尼固有频率的误差相当小,即使当阻尼比为0.5时,有阻尼固有频率与无阻尼固有频率之比也有0.866。而在对水舱进行结构设计时,水舱内流体振动的阻尼比远小于0.5,因此水舱内液体从一侧边舱流向另一侧的时间可近似等于水舱内流体振动固有周期的一半,因此φ0可近似为ω π/(2ωt)。由于系统位置参数Xi和水舱固有频率ωti已经确定,只需对两个水舱的参数Ki进行多变量寻优,使φc(jω)在每一个频率采样点接近 ωπ/(2ωt)。
船舶横摇既取决于波浪能量的大小,也取决于谱密度曲线与横摇放大因数曲线的关系。根据随机过程理论,横摇角φ(t)的谱密度为:

其中:Wφ(ω)为船舶横摇角对于海浪波倾角的幅频特性;Sw(ω)为海浪波倾角谱密度。加装双水舱系统的船舶横摇幅频特性可以由(1)式通过参数频率响应法得到[4]:
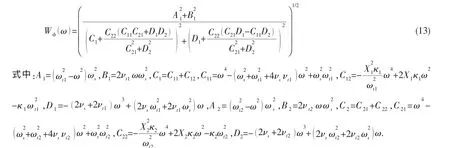
在船舶控制系统设计中,横摇力矩Ww可以利用一个高斯分布的白噪声通过一个成型滤波器产生。 海浪成型滤波器Gw(s)一般选为有理式形式,本文中,Gw(s)选为

其中,系数a1、a2和b1与波高、船舶航向和航速有关。
根据随机过程理论,随机海浪作为有色噪声的谱密度可表示为


设Kmax为水舱最大设计容量,在限制条件K1+K2≤Kmax下,利用多变量寻优技术计算K1、K2,使目标函数J最小。
利用上述方法计算得到的双水舱系统,可在减摇系统满足设计容量要求和获得最大减摇力臂的同时,使系统产生的横摇力矩始终与船舶横摇角速度保持180°相位差,即最大限度增加船舶横摇阻尼力矩,获得满意的减摇效果。
式中S0(ω)是白噪声的谱密度函数,为一个常数。在船舶横摇频率范围内选择n个采样点ω1,ω2,…,ωn,以Sφ(ωi)作为各采样频率点相位逼近的权函数,则优化指标为
5 系统仿真研究
本文针对一条高速滚装船为例进行水舱设计。船舶的参数如下:船长L=195.30m,型宽B=25.6m,型深8.70m(至主甲板),排水量D=19 655.9t,初稳性高GM=2.282m,正常排水量时船舶的固有横摇周期Ts=14.1s。
为了比较双水舱系统和单水舱系统的减摇效果,使两种系统的水舱设计容量相近,单水舱系统水舱总质量为707t,双水舱内液体总质量为704t,基于遗传算法寻优计算,得到K1/K2≈3/4,则双水舱系统中两个水舱容量分别占船舶总排水量的1.49%和1.98%。由(11)式,被动可控式水舱的固有频率为0.54rad/s。当被动式水舱的固有频率与船舶横摇固有频率相同时,水舱系统达到最好的减摇效果,由于安装水舱后的船舶横摇自然频率向低频移动,所以被动式水舱固有频率选为0.4rad/s。水舱容量与可控被动式单水舱相同。水舱的结构设计方法参考文献[8],针对对象船舶设计水舱尺寸如表1所示。所有水舱系统均布置在距离船舶横摇中心上方10m处。仿真时船舶横摇阻尼系数νs=0.1,根据文献[4]和文献[8]中关于水舱阻尼系数对船舶横摇响应的影响及阻尼系数的确定方法,选择最优阻尼系数νt=0.3。
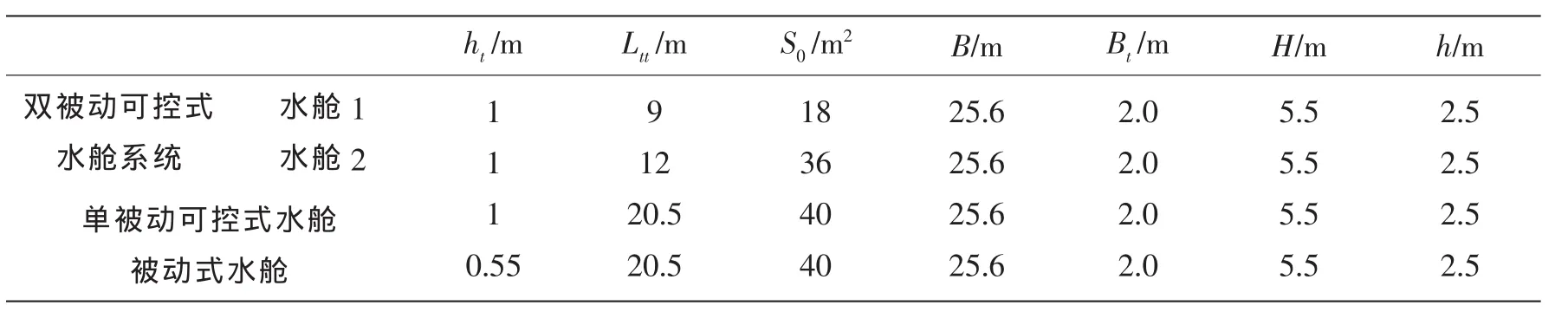
表1 减摇水舱结构设计尺寸Tab.1 Parameters of tanks
仿真时船舶航速分别为0kn和18kns,船舶航行的海情分别取有义波高3m和6m,船舶与海浪遭遇角分别为 30°、90°和 150°。 随机海浪波倾角成型滤波器参数如表2所示。分别对未安装减摇装置、安装被动式减摇水舱、安装被动可控式单水舱系统和安装被动可控式双水舱系统的船舶进行计算机仿真。仿真结果统计数据见表2。图3为船舶航速18kns、海浪有义波高6m时船舶横摇运动时序仿真。图4为船舶航速18kns、海浪有义波高3m时船舶横摇运动时序仿真。图5为双水舱系统控制相位φc的频率特性曲线。
从表3可以看出,减摇水舱在船舶各种航行状态下均有减摇效果。在随机海浪干扰下,可控被动式减摇水舱系统的减摇效果要明显好于被动式减摇水舱。
从图3、图4及表3看出,被动可控式单水舱系统在有义波高6m、船舶航速18kns和遭遇角30°情况下以及有义波高3m的情况下,减摇效果明显降低,而双水舱系统没有受到较大影响,减摇效果在此情况下要明显好于单水舱系统。
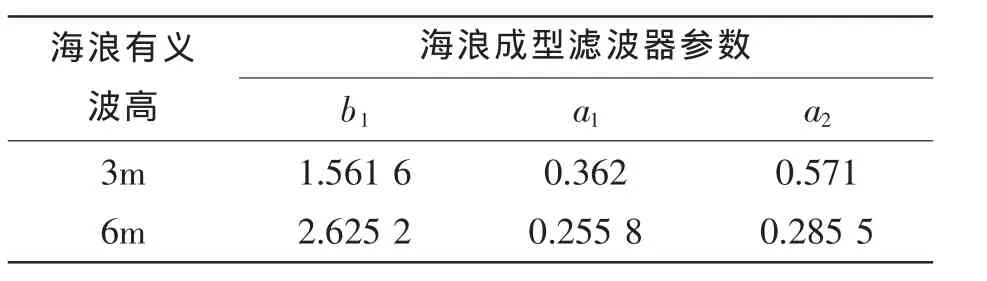
表2 海浪波倾角成型滤波器系数Tab.2 The forming filter parameters for slope of wave surface
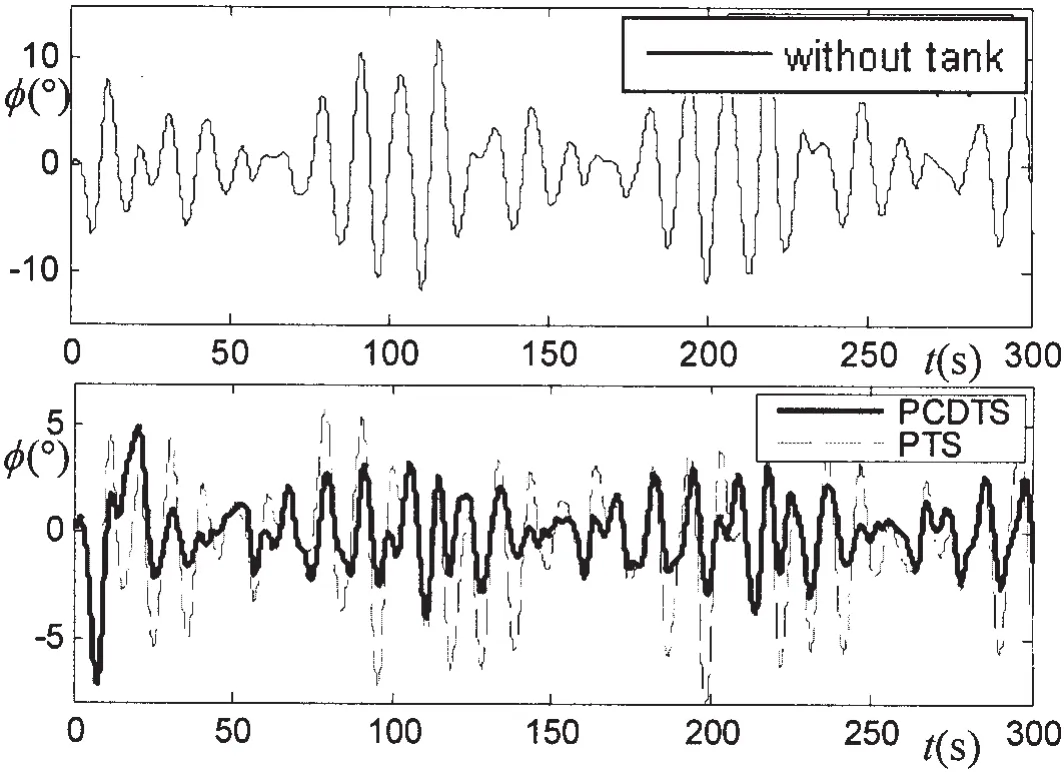
图3 航速18kns、有义波高6m时船舶横摇运动时序仿真Fig.3 Time history of ship rolling stimulation at 18kns in beams seas with 6m significant wave height

表3 仿真结果统计数据Tab.3 Sample result for numerical simulation
在低频海浪干扰下,船舶横摇周期较长,由控制方法和液体运动惯性所导致的如图2所示的相位误差φ0对减摇效果影响不大;而在上述两种船舶航行状况下,海浪干扰频率升高,相对于仿真中所用“船舶—水舱”系统属于高频干扰,水舱内液位与船舶横摇角之间的相位差与π/2之间的误差相对增大,导致单水舱系统的减摇效果下降明显。
从图5中可以看出,由两个不同结构参数的减摇水舱构成的双水舱减摇系统有效地解决了由水舱惯性所产生的相位滞后问题。在较宽的频率范围内,控制相位φc有效补偿了由液体惯性引起的相位滞后,使减摇系统所产生的横摇力矩与船舶横摇角速度保持180°相位差,有效地增加船舶的横摇阻尼,所以双水舱系统可以在更宽的干扰频率范围内起到良好的减摇效果。同时从图5中也可看到,在高频范围内,控制相位φc与液体滞后相位φ0出现较大偏差,减摇效果必然降低甚至产生增摇现象。但对于具有较大横摇惯性的船舶来说,在此高频范围内,海浪对于船舶的干扰非常微小,不需再利用减摇装置进行减摇,可将水舱气阀开关置于常闭状态。

图4 航速18kns、有义波高3m时船舶横摇运动时序仿真Fig.4 Time history of Ship rolling stimulation at 18kns in beams seas with 3m significant wave height

图5 双水舱系统控制相位φc的频率特性Fig.5 Frequency characteristic of controlled phase shift φcof double-tank stabilizers
6 结 论
本文对由两个被动可控式水舱组成的被动可控式双水舱减摇系统进行了系统设计和控制策略研究,提出了利用不同的船舶横摇信号分别控制两个水舱内液体流动的被控式PD控制策略。通过仿真试验得到以下结论:
(1)减摇水舱的减摇效果受船舶航速影响较小,与船舶和海浪的遭遇频率有关。可控被动式减摇水舱的减摇效果要好于被动式减摇水舱,特别在低频范围内优势明显。
(2)利用被动式PD控制的双水舱减摇系统与相同容量的单水舱系统相比,在更宽的频率范围内有较好的减摇效果。且在船舶上的布置更加灵活,在执行某些海上作业时,还可兼顾水舱的减摇和抗静倾功能,用途更加广泛。
[1]Reza M,Alistair R G.On the development of ship anti-roll tanks[J].Ocean Engineering,2007(1):103-121.
[2]Youssef K S,Mook D T,Nayfeh A H.Roll stabilization by passive anti-roll tanks using improved model of the tank-liquid motion[J].Journal of Vibration and Control,2003,9(1):832-862.
[3]Osama A M,Ali H N.Control of ship roll using passive and active anti-roll tanks[J].Ocean Engineering,2009(3):1-27.
[4]陈 放,赖志昌,金鸿章.参数频率相应法在“双水舱”系统中的应用[J].船舶力学,2003,7(1):38-45.
[5]金鸿章,张宏瀚,贲成华.船舶双水舱系统设计与仿真研究[J].哈尔滨工程大学学报,2008,29(3):242-246.
[6]贲成华.船舶-鳍减摇和抗倾系统研究[D].哈尔滨:哈尔滨工程大学,2006.
[7]Jones E B,Roskilly A P,Webster B.Adaptive roll stabilization of fishing vessels[J].IMechE,2006,220,Part M.
[8]赖志昌.U型减摇水舱及试验摇摆台实验研究[D].哈尔滨:哈尔滨工程大学,2001.
[9]金鸿章,赵为平,綦志刚,许叙遥.大型船舶综合减摇系统的研究[J].中国造船,2005,46(3):29-35.