基于单神经元PID的直流电动机速度控制算法研究
2011-03-02刘南昌李全王宏张楠
刘南昌,李全,王宏,张楠
(五邑大学 信息工程学院,江门 广东 529020)
基于单神经元PID的直流电动机速度控制算法研究
刘南昌,李全,王宏,张楠
(五邑大学 信息工程学院,江门 广东 529020)
为了处理常规PID难以克服的电动机非线性、模型参数易变等问题,通过单经元PID速度控制器控制算法的研究,实现了对PID控制器参数的动态调控,克服了电动机非线性、参数易变等不良影响.仿真结果表明,单神经元PID控制器优于常规PID,其自适应能力好、响应快、鲁棒性强、系统稳态和动态特性良好,能满足实际运用和电动机快速响应的要求.
电机控制;PID;单神经元PID
在直流电动机驱动系统中,速度控制是工程应用的主要目的,一般要求系统具备响应时间短、稳定误差小等特点,常规PID是直流电动机驱动系统速度控制的较好手段.但是,由于电动机驱动系统具有非线性、时变性以及驱动响应的滞后复杂性等特点,对其建立准确的数学模型将变得非常困难,这就使通常依据电动机模型计算出的PID控制器参数很难达到满意的控制效果.神经网络控制作为一种不依赖于模型的控制方式,在非线性控制领域得到了广泛的应用,[1-2]本文对常规PID和单神经元PID在电机速度控制系统上的应用进行了研究和比较.
1 系统简介
直流电动机驱动速度控制系统包括电动机驱动模块、直流电动机和测速模块.本文采用RS-380SH型直流电动机作为系统的驱动电动机.其工作电压范围3.0~9.0 V、额定电压值7.2 V[3],无负荷转速16 200 r/min、无负荷电流0.50 A,额定转速14 060 r/min、额定电流3.29 A、额定转距111 g·cm、额定功率16 W,起动转矩840 g·cm、起动电流21.6 A.传递函数为:

静态工作时, J= 0.006 7、B=0.10[4].由于电动机驱动系统具有非线性、时变性以及驱动响应的滞后复杂性,并且易受到各种干扰,故电机参数J、B不稳定.
测速模块采用分辨率为200脉冲/转的增量式旋转编码器.用单片机的外部中断来记录编码器输出的脉冲数n和驱动轮转动的圈数,根据 v = n 200t π d(其中t为速度采集时间,d驱动轮直径),得到电动机驱动轮速度,将v反馈给单片机计算,实现闭环控制.
2 控制算法
智能运动系统控制软件采用模块化程序结构,根据功能要求,系统程序主要包括系统初始化程序、图像数据采集及处理程序和PID速度控制程序等.
2.1 常规PID速度控制算法
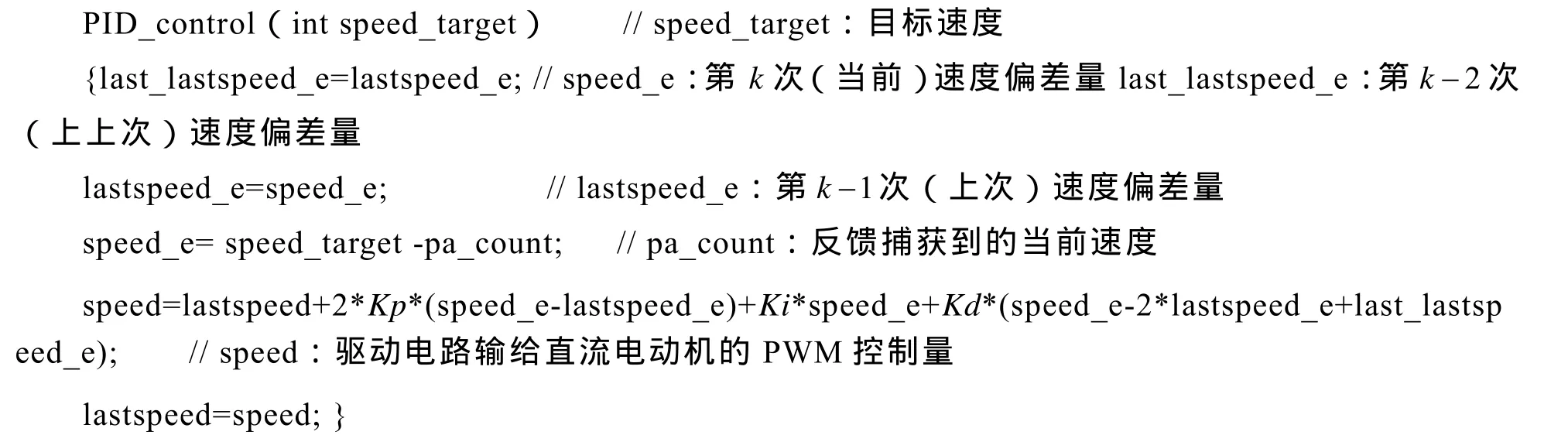
对于不同的识别目标,系统要有不同的目标速度.我们先采用常规PID算法,通过旋转编码器实现驱动轮的速度采样,再进行闭环PID速度控制.系统利用测速模块反馈的当前速度值,通过增量式PID算法进行调节,其算式为:

C语言代码是如下:
2.2 神经元PID速度控制算法
神经元是神经网络的基本单位,具有自学习和自适应能力,而且结构简单易于计算.常规PID控制器的参数与被控对象联系密切,将二者结合组成具有自适应能力的神经元PID控制器,可以实现电动机负载变化时控制器参数的自动调节.图1所示为神经元控制器结构图.
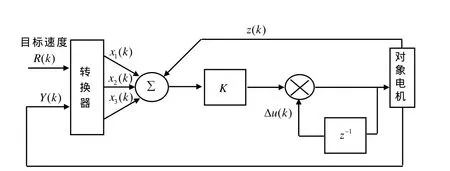
图1 神经元控制器结构图
图1中转换器的输入为R( k)、输出为Y( k),经过转换器转换后得神经元的输入量x1( k)、x2( k)、x3( k)即为积分、比例和微分3个分量,且有:

设 wi( k )(i = 1,2,3)为对应于 xi( k)的加权,K为神经元的比例系数,K>0.神经元控制器通过有监督的Hebb学习规则来调整加权系数,控制量u( k)为:

神经元PID控制器的控制学习算法为:

式中,Δ e( k ) = e( k ) - e( k -1),z( k )=e( k),w1、w2、w3分别对应增量式PID控制器的3个参数KI、KP、KD, ηI、 ηP、 ηD为比例、积分、微分的学习速率.
3 仿真结果及分析
机器视觉中控制周期一般为20 ms[3],故设采样时间 t= 20 ms.采用常规PID控制方式时,由于微分项对干扰信号比较敏感,影响系统的稳态性能,故微分项通常被忽略,即KD=0,根据电机参数可以得到PID参数分别为KP=4、 KI= 0.05.采用神经元PID速度控制时,设速度控制器PID参数的初始值为 w1= 0.15、 w2= 0.12、 w3= 0.12,其学习速率 ηI为0.2、 ηP为0.01、 ηD为0.001,神经元的比例系数K为0.6,在此条件下,跟踪给定速度波形如图2所示.
模拟电机受到各种干扰,即电机数学模型参数J、B发生变化时,常规PID与单神经元PID控制方式下的速度波形亦发生相应的变化,其控制效果对比如图2~5所示.
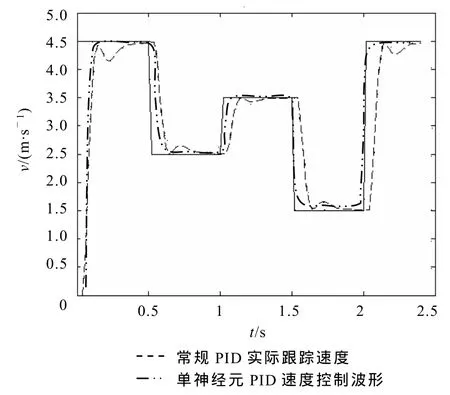
图2 正常情况下常规PID和单神经元PID控制速度波形
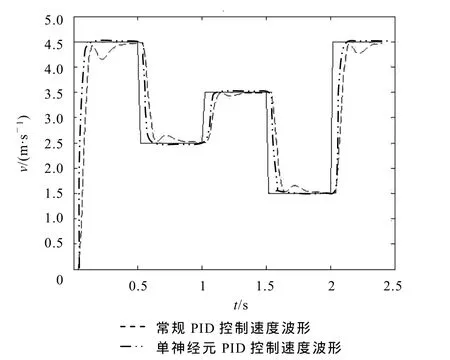
图3 J= 0.005、B不变时的效果图
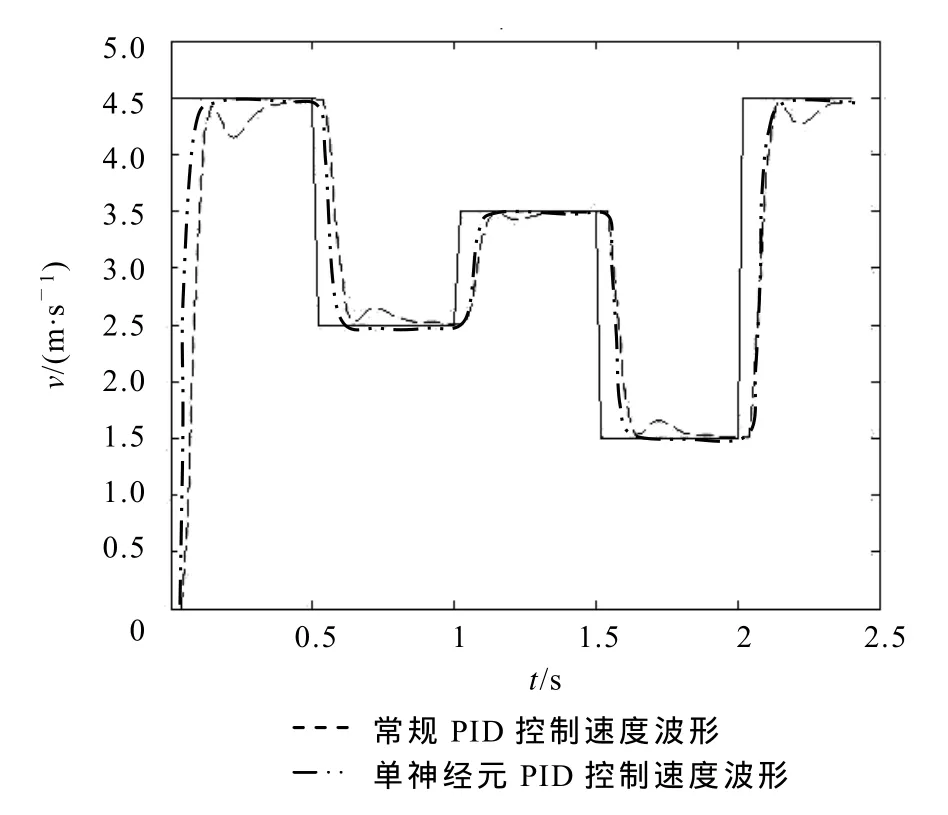
图4 J= 0.003、B不变时的效果图
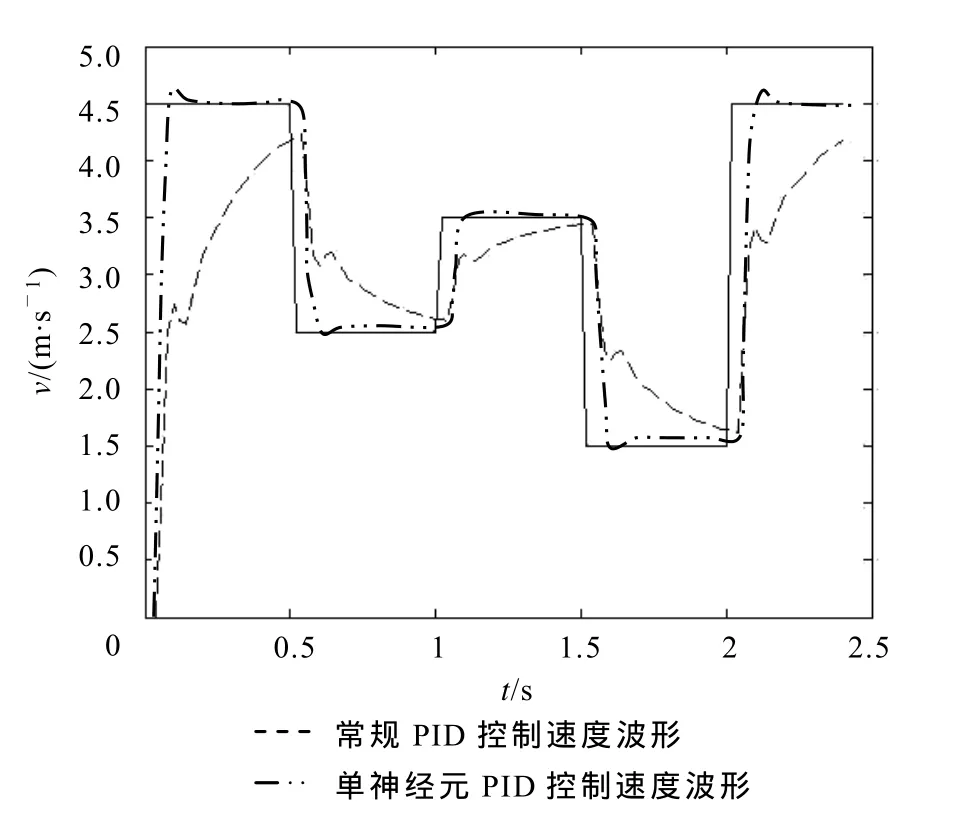
图5 J= 0.005、B=0.2的效果图
由图2可以看出,采用单神经元PID控制的效果好于常规PID控制方式,速度波形上升时间没有受到参数整定计算影响,都是120 ms左右,有较小的超调量并且稳态运行时速度的稳定性也较好.从图4~5可以看出,通过Matlab仿真,模拟电机参数J、B波动变化,常规PID因为参数KI、KP、KD没有随着J、B参数的变化而作相应的调整,所以跟踪很不理想,而单神经元PID能很好地进行速度跟踪,效果非常理想,表现出了良好的自适应性和鲁棒性.
4 结论
仿真结果表明,由于神经元的连接权值可调,使得基于单神经元的PID控制器具有在线调整参数、自学习以及自适应的能力.在电动机速度控制系统中,单神经元PID优于常规PID,能快速提高系统的速度反应性能,该方法应用在电机控制中是可行的.
[1]刘金琨.先进PID控制及其MATLAB仿真[M].2版.北京:电子工业出版社,2005.
[2]曹敏,徐凌桦.神经元PID算法在倒立摆控制系统中的应用[J].微计算机信息,2009,25(1):70-71.
[3]马艳,徐淑华,周建春.基于摄像头寻迹的智能电动车的设计[J].机械与电子,2009(2):21-23.
[4]丁军,徐用懋.神经元自适应PID控制器及其应用[J].控制工程,2004,10(1):28-29.
Single Neuron PID DC Motor Speed Control Algorithm
LIU Nan-chang,LI Quan,WANG Hong,ZHANG Nan
(School of Information Engineering,Wuyi University,Jiangmen 529020,China)
In order to overcome the nonlinear manner and parameter variability of the motor,the study achieves the purpose of dynamic control of parameters of PID controller and overcomes the nonlinear manner and parameter variability of the motor by studying the Control Algorithm of speed controller of single neuron PID.Simulation results show that speed controller of single neuron PID achieves a good adaptive capacity,fast response,robustness,system stability and dynamic characteristics and it can meet the practical application and rapid response of motors.
motor control;PID;single neuron PID
?
TP11
A
1006-7302(2011)03-0070-04
2011-04-11
刘南昌(1985—),男,江西赣州人,硕士研究生,研究方向为模式识别、智能控制;李全,副教授,硕士生导师,通信作者,主要从事模式识别方面的研究.