一种卧式圆柱度测量虚拟仪器的不确定度评估
2011-02-20荆学东
荆学东 , 吉 涛, 何 凯, 杨 亮
(1.上海应用技术学院机械工程学院, 上海 204189; 2.陕西科技大学机电工程学院, 陕西 西安 710021)
0 引 言
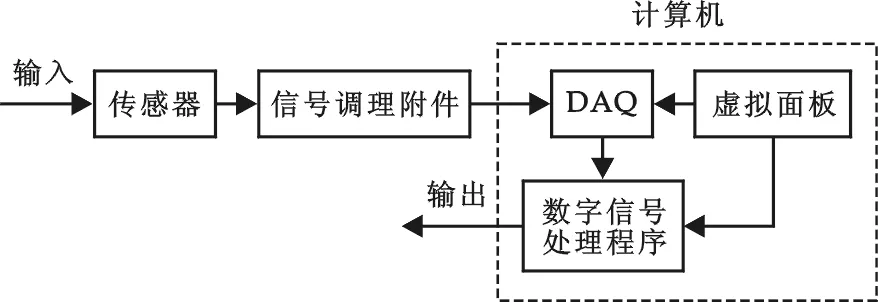
图1 虚拟仪器的典型结构
虚拟仪器的典型结构如图1所示.虚拟仪器是基于计算机的仪器,仪器工作时通过操纵位于计算机屏幕虚拟面板上的“按钮”来完成检测或者控制任务.与以硬件为主的传统仪器不同,在虚拟仪器中数据采集和信号调理控制、信号处理以及结果显示等主要通过软件实现.
目前虚拟仪器虽然得以普遍应用,但虚拟仪器的测量不确定度评估由于涉及的因素多、非线性及强耦合等原因,迄今仍然没有公认的评估手段.本文将依据GUM[1]的B类型评估方法,研究一种圆柱度测量虚拟仪器的不确定度评估问题.
1 圆柱度测量虚拟仪器组成
1.1 圆柱度测量原理及虚拟仪器的组成

图2 虚拟仪器测量装置
圆柱度测量装置示意图如图2所示,其测量原理是将高灵敏度电涡流传感器的检测探头沿工件直径方向安装,利用工件的旋转运动以及探头沿工件轴向运动检测出工件外径沿径向及轴向的变化,再利用最小二乘法求出工件的圆柱度.
图2中测量装置除工控机RK-40610外,1为X轴电机, 2为工作台箱体, 3为工件轴向固定装置, 4为水平导轨,5为被测工件,6为Z轴电机,7为垂直导轨,8为传感器夹持装置,9为传感器测头,10为三爪卡盘,11为主轴电机.该装置为测量圆柱度提供3种运动:工件旋转运动,它由主电机11通过带动主轴运动实现;传感器沿工件表面的轴向运动,它由X轴电机1 驱动丝杠副实现;传感器沿工件表面的径向运动,它由Z轴电机6驱动丝杠副实现.
1.2 测量环节的不确定度影响因素分析
整个测量环节包括电涡流传感器、数据采集装置、检测软件和计算机以及机械装置,因此该仪器测量的不确定度来自上述5个方面,本文只讨论传感器、数据采集、DSP以及测量装置的不确定度.
1.2.1 标准不确定度及合成分布的不确定度
假定某一测量环节j的量程为Aj,它有n个相互独立的不确定度来源.对于每一个不确定度来源i,产品生产厂家保证了其误差范围为±eji.依据GUM,其相应的标准不确定度uji(标准偏差的估计值σji)为:
σji=uji=eji/kαji
(1)
式中kαji为置信系数,它可以依据误差在区间±eji的概率分布规律确定.令:
(2)
从而合成分布的偏峰系数γcj为[2]:
(3)
式中:γji是第i个不确定度来源的偏锋系数,它与置信水平αji以及置信系数kαcj的关系如表1所示.

表1 置信系数kα和偏峰系数γ的关系
因此测量环节j的合成分布的置信系数kαcj可以依据偏峰系数γcj和显著水平α由表1得以近似确定,从而该环节的合成分布的不确定度ucj为:
ucj=kαcjσj
(4)
该测量环节的相对不确定度urj为:
(5)
1.2.2 电涡流传感器的不确定度
传感器不确定度主要包括非线性、噪音、长期稳定性、滞后、重复性、温度漂移、灵敏度、偏移、分辨率以及其它干扰[2].本文使用的电涡流传感器型号为CWY-D0-502,由技术规范可知该传感器的不确定度的主要来源如表2所示.利用式(1)可确定每一不确定度来源的标准不确定度ui,再按照单一环节的测量不确定度评估方法[2,3],由式(2)~(5)确定该传感器技术规范并求出每一影响因素的不确定度及合成不确定度,如表2所示.

表2 涡流传感器的不确定度
1.2.3A/D转换的不确定度
A/D转换的不确定度来源主要包括非线性、长期稳定性、温度漂移、偏移以及分辨率、噪音、量化误差、凝固时间、通道干扰、时标抖动等[2].本文采用了16位的NIPCI-6010数据集采集卡,由其技术规范可知该传感器的不确定度的主要来源如表3所示.采用与1.2.2节相同的方法,可确定数据采集卡中每一影响因素的不确定度及合成不确定度以及相对不确定度,如表3所示.

表3 DAQ的不确定度
1.2.4 DSP引起的不确定度
和DSP相关的不确定度来源主要有两种,即DSP算法偏差和舍入误差.算法偏差也称为截断误差,是由于检测算法的有限次运行导致的.如对于时域无限长的信号需要进行加窗处理,因为对信号进行截断,其频谱不再连续;还有对函数利用有限项逼近进行计算等,这些都势必带来计算误差.舍入是由于计算机微处理器的字长有限造成的,它可能发生于浮点数的加法和乘法运算,此时其不确定度可分别由式(6)和(7)计算[4],也可能发生在定点数的乘法运算,此时其不确定度可由式(8)计算[5].
(6)
(7)
(8)
式中:Bm代表尾数的位数;p是一个在加法运算中与舍入发生概率相关的因子;Bx是计算机的固定字长.
由于采用的计算机字长为Bm=32位,代入式(6)~(8)可得:ufloat,add≈0;ufloat,multipl≈0;ufixedt,multipl≈0.因此,DSP的不确定度uDS≈0.
2 圆柱度测量不确定度分析


3 结论
(1)在几何量测量虚拟仪器中,A/D转换以及DSP的不确定度极小,而传感器的不确定度对整个仪器的测量不确定度影响最大,因此选择不确定度较小的传感器要比选择高精度数据采集装置更容易提高仪器测量精度.
(2)尽管可以利用误差分离技术减小传感器相对于工件的位置误差对测量结果的影响,但是难以减小传感器本身的不确定度对测量结果的影响.
参考文献
[1] ISO. Guide to the expression of uncertainty in measurement[S]. Geneva, Switzerland (ISBN 92-67-10188-9), 1993.
[2] Jing Xuedong. Evaluation of measurement uncertainties of virtual instruments[J]. International Journal of Advanced Manufacturing Technology(UK), 2005, 27(11-12): 1 202-1 210.
[3] 荆学东. 基于虚拟仪器的纳米颗粒复合电刷镀工艺过程自动化研究[D]. 上海:上海交通大学博士学位论文,2005.
[4] I. Pitas, M. Strintzis. Floating-point error analysis of two dimensional fast Fourier transform algorithms[J]. IEE Trans. On Circuits and Systems, 1988, 35(1): 112-115.
[5] K. Kalliojarvi, J. Astola. Roundoff errors in block-floating-point system[J]. IEEE Trans. On Signal Processing, 1996, 44(4): 783-790.
