基于改进L-M算法的NSV姿态系统模糊建模
2010-08-24王宇飞吴庆宪姜长生
王宇飞 吴庆宪 姜长生
(南京航空航天大学自动化学院,南京 210016)
作为一种性能良好的逼近器[1-2],模糊系统被广泛应用于非线性系统的建模中[3-5].模糊方法备受研究者关注,尤其是T-S模糊方法.传统的模糊逼近对象是根据专家经验建立的,虽然其基本上可以反映系统的非线性动态特性,但模糊子系统参数一旦确定后将不再变更.而实际中,当模型本身的参数一旦发生调整,已建立的模糊逼近对象将无法适应此类变化,大大影响控制效果.引入优化训练算法可在线调整模糊逼近器,提高逼近精度,适应系统模型参数的变化.
Levenberg-Marquardt(L-M)算法[6]是一种著名的寻优算法,尤其在神经网络的批处理训练中通常被认为是最好的算法之一,其训练精度和训练速率都优于BP、共轭梯度法、高斯-牛顿法等算法[7-9].但是当L-M算法用于求解线性方程组时,要求方程组解处的Jacobi矩阵非奇异,这一条件往往过强,可以通过引入局部误差界的定义来弱化此条件[10-12].基于模糊系统的万能逼近特性[13],L-M 算法还可用于T-S模糊系统训练[14],使其不过分依赖于专家经验,有效逼近复杂非线性系统及函数,且可对各线性多项式的参数及模糊隶属度函数的参数进行在线调节,大大提高了训练时的收敛速率.
基于以上分析,本文在局部误差界条件下,研究了一种新的L-M参数迭代算法,并将其推广应用于T-S模糊系统的建模中.该算法可在线训练各线性多项式的参数及模糊隶属度函数的参数,有效避免Jacobi矩阵奇异并加快收敛速率.最后,将该算法应用于NSV系统的模糊建模训练中.仿真结果表明,与标准L-M算法相比,该算法的收敛速率明显加快.
1 NSV姿态系统建模
1.1 NSV姿态系统
假设NSV是一个刚体,那么其姿态系统可以表示为

式中,x(t)={ωT,ΩT}T∈R6;Ω ={α,β,μ}T∈R3为姿态角;α,β,μ 分别为攻角、侧滑角和滚转角;ω ={p,q,r}T∈R3为角速率;u(t)∈R3为控制力矩;g(x)∈R6×R3为输入矩阵;Δ(x)∈R6为不确定部分;f(x)∈R6为非线性的,可表示为

可以看出,NSV姿态系统是高度非线性和强耦合的,并且含有不确定部分,这使控制器的设计增加了难度.采用模糊系统可以逼近系统的特性.传统的模糊系统需要依靠专家经验,这在实现过程中是比较困难的,但利用L-M算法就可以解决这个问题.
1.2 训练方案
基于L-M算法的T-S模糊在线逼近方案如图1所示.采用输入输出的采样数据(xk,yk)(k为迭代次数,且k=1,2,…)的信息,基于T-S模糊理论来构建模糊逼近器FTS,逼近器参数θ0可在线调节.
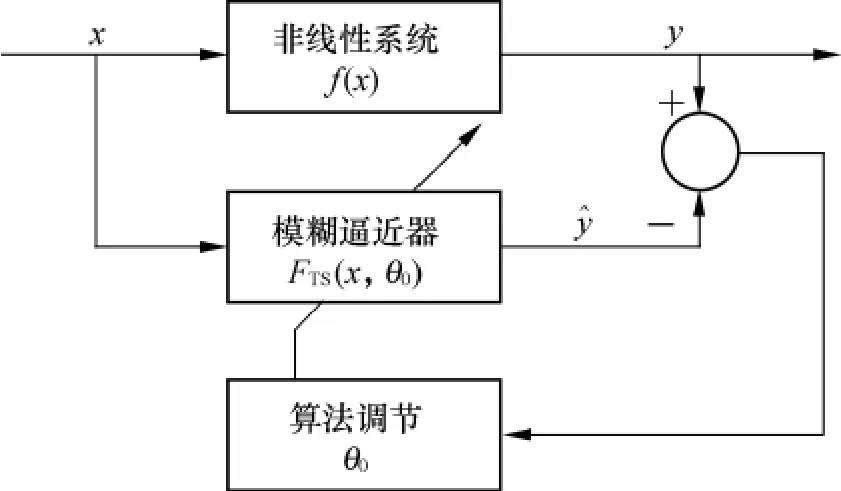
图1 L-M算法模糊在线逼近方案
基于T-S模糊系统的逼近器可表示为

式中,^y=FTS(x,θ0)为模糊逼近输出;pi(x)=ai,0+ai,1x1+ …+ai,nxn(i=1,2,…,R;j=0,1,2,…,n)为后件函数;为组成T-S模糊系统的第i个模糊规则的模糊权函数;分别为第i个模糊规则下xj的隶属度函数的中心和宽度.
模糊规则定义如下:

若有如下定义:

则T-S模糊系统可表示为

若要求隶属度函数的中心和宽度均可在线调节,则定义参数θ∈Rp为

2 改进L-M算法及模糊系统训练
2.1 标准L-M算法
在标准L-M算法中,逼近误差可定义为

式中,ε(θ):Rp→RM(i=1,2,…,M)为连续可微函数;M为逼近对象y的数据采样点的个数.在本文中,假设当迭代次数k→∞时,ε(θ)=0解集非空,记为Θ*.
性能指标函数定义为

迭代求解参数θ的修正公式为

式中,k为迭代次数;Γ(θk)=ε′(θk)为 Jacobi矩阵;Λk= λkI∈Rp×p为对角正定阵,以保证 Γ(θk)TΓ(θk)+Λk正定且可逆.
2.2 改进L-M算法
在标准L-M算法中,将λk取为常数.本文考虑的是在局部误差界下一种基于信赖域的全局收敛的LM算法,根据逼近效果可实时调节步长,以进一步改善L-M算法的收敛速率.因此,先给出局部误差界的定义.
定义1 设 N⊂Rp,且满足 N∩Θ*≠∅.如果存在常数 c>0,使得‖ε(θ)‖≥cdist(θ,Θ*),∀θ∈N,则称ε(θ)在N内有局部误差界.其中 dist(θ,Θ*)=minϑ∈Θ*‖θ-ϑ‖,局部误差界条件比非奇异性条件弱.
选取迭代参数λk=αk‖εk‖,指标函数由式(9)式给出,则第k步迭代的实际下降量和预测下降量分别为

实际下降量与预测下降量的比值为

下面,给出改进L-M算法的步骤如下:
① 给定 θ1∈Rp,ξ≥0,0 <m < α1,0≤β0≤β1≤β2<1,k:=1.
② 若‖(Γk)Tεk‖≤ξ,则终止算法;否则,取 λk=αk‖εk‖,求解得到 Δθk.

③ 计算 rk=Ak/Pk,令

④计算

⑤令k:=k+1,转至步骤②.
2.3 基于改进L-M算法的T-S模糊系统训练
训练的目标是当迭代数k→∞时y→^y.当采用改进的L-M 算法训练T-S模糊系统时,逼近误差可表示为

误差向量ε是参数θ的函数;权值增量Δθ可由2.2节中改进L-M算法得到.用于模糊系统训练时,Jacobi矩阵Γ(θ)定义如下:


同理可得FTS(x(i*),θ)对参数θ其余分量的偏导数.鉴于篇幅,下面仅给出FTS(·)对,aj*,0,aj*,1的偏导表达式,即

至此,得到了Jacobi矩阵Γ(θ)中各元素的表达式,改进的L-M 算法就可以对T-S模糊系统进行训练了.
3 在NSV姿态系统模糊建模中的应用
为验证本文算法的有效性,并与标准L-M算法进行比较,下面对NSV姿态系统中非线性函数f2(x)进行模糊逼近.
3.1 参数的选择与初始化
一般来说,p,q,r∈[-0.5,0.5],α,β,μ∈[-0.5,0.5],故限制各隶属度函数的中心均在此范围内,而隶属度函数的宽度限制在[0.01,1]之间.
各隶属度函数中心的初始值在[-0.5,0.5]均匀分布,宽度的初始值分别为0.5.θ0的初始值选为0.
取 ξ=0.01,m=1 ×10-8,β0=1 ×10-4,β1=0.25,β2=0.75,α1=0.5.
3.2 仿真结果
x1是f2(x)中的关键变量,故而仅给出函数分量f2(x)关于变量x1的模糊逼近及逼近误差仿真效果图(见图2和图3).
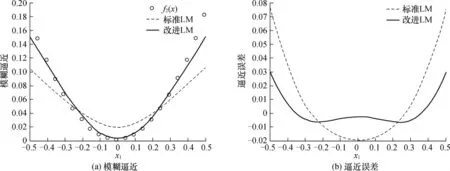
图2 1次迭代逼近f2(x)的结果

图3 2次迭代逼近f2(x)的结果
当逼近误差小于0.01时,L-M算法停止迭代.由图3可知,本文算法在迭代2次后就已达到规定的误差精度,算法收敛速率优于标准L-M算法.
4 结语
本文提出了一种用于T-S模糊系统训练的改进的全局收敛L-M 算法.采用L-M 算法训练T-S模糊系统,可在线调节各线性系统的参数及模糊隶属度函数的参数,使系统建模时不用过分依赖于专家经验,从而大大提高了T-S模糊系统逼近复杂非线性系统的收敛速率.将本文算法应用于训练T-S模糊系统,以逼近NSV姿态系统.仿真结果表明,与标准L-M算法相比,本文算法在保证精度的同时,收敛速率明显加快.由此可知,本文算法可有效提高L-M算法训练T-S模糊系统的收敛速率.
References)
[1] Wang L X.Fuzzy systems are universal approximators[C]//Proceeding of the 1992 IEEE International Conference on Fuzzy Systems.San Diego,CA,USA,1992:1163-1170.
[2] Ying H.General Takagi-Sugeno fuzzy systems are universal approximators[C]//Proceedings of the 1998 IEEE Interna-tional Conference on Fuzzy Systems.Anchorage,AK,USA,1998:819-823.
[3] Onut S,Saglam C O.Modeling and optimization of general cargo port operations through fuzzy minimal spanning tree and fuzzy dynamic programming approaches [J].International Journal of Innovative Computing,Information and Control,2008,4(8):1835-1851.
[4] Takagi T,Sugeno M.Fuzzy identification of systems and its applications to modeling and control[J].IEEE Transactions on Systems,Man and Cybernetics,1985,15(1):116-132.
[5] Wang Y H,Wu Q X,Jiang C S,et al.Acceleration of Levenberg-Marquardt method training of chaotic systems fuzzy modeling [J].World Journal of Modeling and Simulation,2007,3(4):289-298.
[6] Marquardt D.An algorithm for least squares estimation of nonlinear parameters[J].Journal of the Society for Industry and Applied Mathematics,1963,11(2):431-441.
[7] Hagan M T,Menhaj M B.Training feedforward networks with the Marquardt algorithm[J].IEEE Transactions on Neural Networks,1994,5(6):989-993.
[8] Chen T C,Han D J.Acceleration of Levenberg-Marquardt training of neural networks with variable decay rate[C]//Proceedings of the International Joint Conference on Neural Networks.New York,USA,2003:1873-1878.
[9] Amir A S,Mohammad B T,Abbas H.Modified Levenberg-Marquardt method for neural networks training[J].World Academy of Science,Engineering and Technology,2005,6(6):46-48.
[10] Yamashita N,Fukushima M.On the rate of the convergence of the Levenberg-Marquardt method[J].Computing,2001,15(Sup1):239-249.
[11] Fan J Y,Yuan Y X.On the quadratic convergence of the Levenberg-Marquardt method without nonsingularity assumption[J].Computing,2005,74(1):23-39.
[12] Yang L,Chen Y P.A new globally convergent Levenberg-Marquardt method for solving nonlinear system of equations[J].Mathematic Numerica Sinica,2008,30(4):388-396.
[13] Wang L X.Universal approximation by hierarchical fuzzy systems[J].Fuzzy Sets and Systems,1998,93(3):223-230.
[14] Passino K M.Biomimicry for optimization,control and automation[M].London,UK:Springer-Verlag,2005.
