基于磁悬浮隔振器的主动隔振控制实验研究
2010-08-24陈绍青
陈绍青 王 永
(中国科学技术大学自动化系,合肥 230027)
根据隔振时是否需要外界输入能量,隔振技术可以分为被动隔振和主动隔振.其中,主动隔振通过在振源与隔振对象之间加入作动器,施加主动控制使该作动器与被动隔振器共同或者独立工作.主动隔振由于能够很好地克服被动隔振存在的低频与宽带随机振动下隔振效果差的缺点,而日益受到重视[1-2].
作动器是控制器与被控对象之间联系的纽带,是实现主动隔振控制必不可少的环节.其中,电磁式作动器具有响应快、控制力大、无摩擦的优点,是新型的机电磁一体化作动器.虽然电磁式作动器在振动主动控制中得到了较为广泛的应用[3],但是其在舰船大型辅机设备的隔振应用中,除了国外的一些研究[4-6]有所涉及,国内在这方面的研究尚处于起步阶段.
同有源消声技术类似,主动隔振是控制器采用一定的控制策略驱动作动器产生次级振动,该振动与振动干扰叠加,从而减少振动向隔振对象的传递.基于滤波x-LMS算法(FXLMS)的自适应前馈控制算法简单、易于实现,且对于线性系统具有较好的稳定性和可靠性,因而在主动隔振中应用较广泛,对于周期性振动也能取得较好的控制效果[7].但是这类算法由于需要辨识次级通道模型,可能存在以下问题:① 增加算法实现的复杂度;②次级通道辨识若存在较大误差将影响最终控制器的性能;③当次级通道为时变时,需要在系统中加入辅助输入以完成通道的在线辨识,这将影响最终的收敛结果[8-9].
本文研究了一类新型的磁悬浮主动隔振系统的控制问题,研制了一款能够支撑200 kg静态载荷、大工作行程的磁悬浮隔振器,并建立了相应的隔振模拟实验系统.对于本文的主动隔振系统来说,由于系统工作在持续激励下,能够采集到与振源信号相关的稳定的参考信号,故可以采用自适应前馈控制的方法.在基于Zhou等[8-9]提出的无需次级通道辨识的有源噪声控制算法的基础上,改进并设计出一种自适应前馈控制器.为将该控制器成功应用于带有非线性环节的磁悬浮主动隔振系统上,采用孟令雷等[10]提出的静态电磁力实验建模的方案建立了该款隔振器的电磁作动单元模型,并将其逆模型应用到自适应前馈控制器中.接着,在隔振模拟实验平台上进行主动隔振实验,验证了当收敛步长固定时算法的有效性,但是这种定步长算法的收敛较慢,不利于应用.在对算法作进一步优化,实现归一化变步长后,主动隔振实验取得了更为显著的隔振效果.
1 实验系统设计与实现
1.1 实验系统组成
整个实验系统由激扰源、负载、磁悬浮隔振器、弹性基座和安装基础共同组成,如图1所示.其中,安装基础的质量远大于隔振器的静态载荷,并在安装基础下方设置支撑弹簧,使得其固有频率为2.7 Hz左右,以模拟船体随波浪缓慢起伏的环境.隔振器位于负载与安装基础之间,并通过一个弹性基座与安装基础固连.信号发生器、功率放大器1和激振器构成系统的激扰源,通过函数信号发生器产生持续激励的电信号驱动功率放大器1,可使得电磁式激振器激励200 kg的负载.以隔振器与弹性基座的联结点作为减振目标点,通过加速度传感器提取目标点的振动信号,反馈到PC机中的主动控制器中计算控制信号,控制信号经过功率放大器2后驱动磁悬浮隔振器工作,实现主动隔振.

图1 磁悬浮隔振模拟实验平台系统示意图
1.2 磁悬浮隔振器设计及其电磁作动单元模型的建立
本文所设计的磁悬浮隔振器为主被动复合式隔振器,该隔振器在被动隔振单元的基础上串联一个主动电磁作动单元,以对设备和结构施加作用力.其优点在于由被动隔振单元承担全部载荷,电磁作动单元只提供动态控制力.磁悬浮隔振器的主动单元在隔振过程中,能够根据需要主动抵消设备的作用力,能使得整个隔振系统在振动时的实际动质量增加,弹性系数变小,而隔振器的弹簧变形量仍不变,即改变了整个隔振系统的等效刚度.根据上述的原理,可建立如图2的磁悬浮隔振器的机理模型.其中K为弹簧刚度,m为隔振器负载重量,f为激振力,x为负载位移,F为电磁力,C为弹簧阻尼.
根据本文隔振模拟实验平台的参数和特性,最终研制出的磁悬浮隔振器实物如图3所示,其主要参数如下:承载200 kg静态载荷情况下,隔振器的固有频率约为3.8 Hz,总气隙10 mm,工作行程±4 mm,最大输入电流6 A,最大输出磁力1 000 N.采用孟令雷等[10]提出的建模方法,可建立包含驱动电磁铁功率放大器特性的电磁力模型(即图3中的F),得到上下电磁铁的电磁力公式如下:

式中,Fu,Fd分别代表上、下电磁铁产生的磁力;i为输入到功率放大器的驱动电流;g为磁隙的大小.

图2 磁悬浮隔振器的机理模型

图3 磁悬浮隔振器实物图
1.3 控制系统的组成
磁悬浮隔振器控制系统主要由如图1所示的传感器及其调理仪、研华公司的16通道数据采集卡PCI-1710和4通道驱动卡PCI-1720、配置高速CPU处理器的PC主机及使用Microsoft VC6.0编写的隔振模拟实验平台主动控制系统软件组成.软件采用窗口操作模式,除了具备数据采集、控制量计算等功能,还实现了实验数据的实时图形显示和数据存储功能.
2 主动隔振控制律设计
本文涉及的隔振模拟实验平台的振源为周期性振动,且该信号可测,因此考虑通过施加前馈信号来抵消振源信号向减振目标点的传递.Zhou等[11]在对滤波x-LMS算法进行几何分析的基础上,研究了一种无需次级通道模型的自适应滤波控制算法.他们首先指出,当次级通道模型与真实模型的相位误差不大于±90°,且步长因子满足一定条件时,滤波 x-LMS 算法始终是收敛的.接着,Zhou 等[8-9]将滤波 x-LMS 算法的几何分析结果推广到了完全不考虑次级通道的情况.基于LMS算法的自适应滤波器的原理图如图4所示.
在图4中,P(z),S(z)分别代表初级通道和次级通道,W(z)是自适应滤波器,x(n)是参考信号,v(n)是目标点处附加的零均值噪声,它与x(n)无关.定义参考信号向量x(n)=[x(n) x(n-1) … x(n-M)]T,其中M是自适应滤波器的阶次.自适应滤波器系数的更新公式为

式中,μ是一个小的正实数.
则对于一个单频输入Xω(n)有

式中,∠Sω代表Sω的角度,代表Sω的幅值.根据文献[10]的讨论结果,可以得到当步长满足

并且∠Sω在±90°的范围内时,Wω(n)的更新公式依然适用,不需要次级通道最终也能收敛到最优值.如果∠Sω在±90°的范围外,自适应滤波器就会发散.这时,如果改变式(2)中μ前面的符号,即

此时,对于单频输入有

通过改变步长的方向,可以把角度差从±90°的范围外转移到±90°的范围内,图5给出了式(6)的直观物理解释.当然也可能有角度差刚好等于±90°的情况(此极端情况极其少见),此时只需对参考信号进行延迟输入处理.

图4 LMS算法原理图

图5 式(6)在复平面图中的直观解释
如果没有次级通道的信息,则不能确定∠Sω是在±90°的范围内还是范围外.文献[11]针对这种情况提出了一种能够辨别搜索方向、适应次级通道时变情况的有源噪声主动控制算法.本文研究的磁悬浮隔振器是一个非线性的环节,电磁力与线圈电流、气隙之间是非线性的关系,要将这种算法用于带有非线性特性的磁悬浮隔振系统上,需要对LMS算法进行修改.在求出k时刻FIR控制滤波器输出的控制量u(k)后,根据位移传感器实时测得的气隙值,再通过逆电磁力模型,得到电流值i(k)后施加到磁悬浮隔振器中.此外,为了减小测量噪声的影响,还设计了软件带通滤波器.修改后的算法原理图如图6所示.
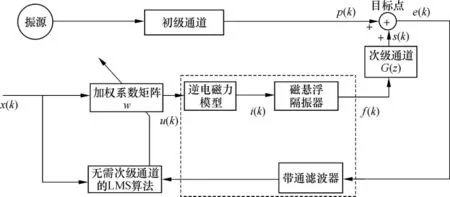
图6 用于磁悬浮隔振系统的算法原理图
Zhou等[8-9]提出的算法往往收敛速度较慢,不利于实际应用.因此,本文结合文献[12]中提出的变步长LMS算法的思想,对Zhou等的算法进行了改进.自适应过程初始阶段采用较大的μ值可以保证较快的收敛速度,而在后期采用较小的μ值则可以保证收敛后得到较小的失调量.采用建立起步长因子μ与误差e之间关系的方法,来实现变步长的算法,同时考虑到归一化LMS能够改善LMS算法的鲁棒性,使系统具有更好的稳定性,提出采用变步长归一化的步长因子,

式中,l为归一化数据的长度;α,β可根据实际情况选取.
提出如下适用于磁悬浮隔振系统的无需次级通道模型的单频主动控制算法:
①初始化自适应滤波器的系数向量、用于评价信号能量的数据采集个数N、定步长μ、浮动因子δ、归一化数据的长度l、变步长因子系数α,β.
③采用定步长μ按式(2)更新自适应滤波器,测量误差信号能量ξ2,如果则停止更新,并改变μ的符号.
④根据式(2)更新自适应滤波器,进而生成磁悬浮隔振器的控制输入.
⑤根据传感器采集的信号,按式(7)更新变步长因子μ(n),并令式(2)中的μ=μ(n),然后返回第④步,继续循环.
3 实验结果与分析
隔振模拟实验平台如图1所示,振源采用50 kg的电磁式激振器,负载的重量200 kg,采用上述的磁悬浮隔振器和控制系统进行主动隔振实验.激振信号采用单频正弦信号,目标频段为5~10 Hz,5~8 Hz频段内,每隔1 Hz进行一次试验,每个频率点处的试验时间为200 s,前后20 s内都不施加主动控制.采用减振目标点的加速度响应来评价主动隔振效果,其计算公式为,式中a1为控制后目标点的加速度响应幅值,a2为控制前目标点的加速度响应幅值,a2为振动加速度的信号能量,故可提取加速度响应的功率谱进行分析.
实验中取β=1,α=5,表1给出了主动隔振在各频率点的基频减振效果.图7给出了5~10 Hz频段内,采用变步长归一化的控制律时,减振目标点的振级落差.图8给出了在5 Hz激振频率下采用定步长算法(全程取μ=0.000 5)与变步长归一化的控制律时的时域曲线效果,定步长情况下目标点加速度响应在加入主动隔振20s后收敛到最小值,变步长情况下则只花了8 s的时间,大大加快了收敛速度.图9是5 Hz激振频率下主动隔振前后目标点加速度的频谱图(功率谱).将图9中主动隔振后目标点加速度频谱取出,并放大纵坐标,以便更清楚地了解主动隔振控制的效果,如图10所示.

图7 主动隔振前、后目标点的基频振级落差

表1 主动隔振在各频率点的基频减振效果

图8 激振频率为5 Hz时目标点的加速度响应

图10 控制后目标点加速度响应频谱
可以看出,在5~10 Hz频段内,采用本文提出的控制律控制磁悬浮隔振器,对目标点的振动具有很好的抑制作用.从图9和图10中可以看出,主动隔振对基频振动有着显著的抑制作用,但同时也增加了一些倍频分量,使得整体的主动隔振效果略差于基频主动隔振效果.经实验分析,倍频分量主要是由磁悬浮隔振器的非线性(磁滞、弹簧等)引起的,而实验平台中弹性基座等的弹体结构又有可能放大其中的某些倍频分量.图11给出的是考虑了大部分倍频分量的情况下,主动隔振前后目标点的总体振级落差,可以看出在5~8 Hz频段内,仍取得了15 dB以上的主动隔振效果.这说明磁悬浮主动隔振控制虽然激发了部分倍频分量,但其整体的主动隔振效果仍然十分明显.
4 结论
1)研制了一种重载荷、大工作行程的磁悬浮隔振器,建立了隔振器的电磁力模型,并构建了以高速CPU的PC机与数采及驱动卡为核心的控制系统.
2)针对隔振模拟实验系统建模难度大的问题,改进并设计了一种无需次级通道模型且收敛速度较快的自适应前馈控制器,并在具有非线性环节的磁悬浮隔振器上加以应用.
3)在隔振模拟实验平台上进行了主动隔振实验.结果表明,在5~10 Hz频段内取得了显著的主动隔振效果.控制前后,目标点的基频振级落差最多达到了30 dB以上;考虑了隔振器非线性等因素的影响后,其整体的主动隔振效果仍然十分明显.
4)在实验中,采用了稳定的振源驱动电信号作为控制器的参考信号,而在某些实际应用场合所能提取到的参考信号(比如振源附近的加速度信号)将受到隔振系统次级反馈通道的影响,有必要进一步研究次级反馈通道存在情形下带来的系统性能不稳定的问题.此外,如何隔绝多频激励下传递给目标点的振动也是今后的研究内容.

图11 目标点的整体振级落差
References)
[1]张磊,付永领,刘永光,等.主动隔振技术及其应用与发展[J].机床与液压,2005(2):5-8.Zhang Lei,Fu Yongling.Liu Yongguang,et al.Active vibration isolation and its application and development[J].Machine Tool and Hydraulics,2005(2):5-8.(in Chinese)
[2]蔺玉辉,靳晓雄,肖勇.振动主动控制技术的研究与发展趋势[J].上海汽车,2006(7):29-31.Lin Yuhui,Jin Xiaoxiong,Xiao Yong.Research and development trend of vibration active control technologies[J].Shanghai Auto,2006(7):29-31.(in Chinese)
[3]赵利颇,潘存治,马强.基于电磁作动器的主动隔振系统研究[J].石家庄铁道学院院报,2006,19(2):51-53.Zhao Lipo,Pan Cunzhi,Ma Qiang.Research on active isolation system based on electromagnetic actuator[J].Journal of Shijiazhuang Railway Institute,2006,19(2):51-53.(in Chinese)
[4]何琳,姚耀中.潜艇声隐身技术研究进展[J].舰船科学技术,2007,29(5):29-42.He Lin,Yao Yaozhong.Development of submarine acoustic stealth technology[J].Ship Science and Technology,2007,29(5):29-42.(in Chinese)
[5] Daley S,Johnson F A,Pearson J B,et al.Active vibration control for marine applications[J].Control Engineering Practice,2004,12(4):465-474.
[6] Daley S,Hätönen J,Owens D H.Active vibration isolation in a“smart spring”mount using a repetitive control approach[J].Control Engineering Practice,2006,14(9):991-997.
[7]张磊,付永领,刘永光,等.基于在线频率估计的自适应反馈主动隔振技术[J].北京航空航天大学学报,2005,31(2):172-176.Zhang Lei,Fu Yongling,Liu Yongguang,et al.Adaptive feedback control method for active vibration isolation based on on-line frequencies estimation[J].Journal of Beijing University of Aeronautics and Astronautics,2005,31(2):172-176.(in Chinese)
[8] Zhou Dayong.ANC algorithms that do not require identifying the secondary path[C]//IEEE International Conference on Acoustics,Speech,and Signal Processing.Philadelphia,PA,USA,2005,3:125-128.
[9] Zhou Dayong,DeBrunner V.A new active noise control algorithm that requires no secondary path identification based on the SPR property[J].IEEE Transactions on Signal Processing,2007,55(2):1719-1729.
[10]孟令雷,倪向贵,王永,等.基于MTS809的磁悬浮隔振器电磁力测量[J].自动化与仪表,2009,24(3):4-7.Meng Linglei,Ni Xianggui,Wang Yong,et al.Measurement of maglev isolator′s electromagnetic force based on MTS809[J].Automation and Instrumentation,2009,24(3):4-7.(in Chinese)
[11] Zhou Dayong,DeBrunner Victor E,DeBrunner Linda,et al.Geometric analysis of filtered-X LMS algorithms[C]//IEEE/SP 13th Workshop on Statistical Signal Processing.Bordeaux,France,2005:127-132.
[12]李昌利,沈玉利.一种改进的变步长LMS算法[J].无线电通信技术,2009,35(1):53-54.Li Changli,Shen Yuli.An improved variable step size LMS algorithm[J].Radio Communications Technology,2009,35(1):53-54.(in Chinese)
