飞机作动器的故障辨识与自修复控制
2010-08-24郭志伟
王 永 郭志伟 彭 程
(中国科学技术大学自动化系,合肥 230027)
故障诊断是自修复飞行控制中的关键技术[1].飞机作动器故障是比较常见的故障,如何快速诊断作动器发生的故障,是能否有效地进行故障修复的关键.故障诊断方法分为基于观测器的残差检测法[2]和基于故障参数估计的诊断方法[3].前者需要确定故障检测阈值,选择不当容易导致误报或漏检;后者则是直接估计与故障有关的参数,通过参数的估计值确定故障,避免了残差法的不足.文献[4]利用高增益观测器,同时对状态和故障参数进行估计,达到确定故障的目的.但该方法是以故障诊断为目的,并没有涉及到故障的修复控制问题,不能简单地将其移植到故障诊断和修复控制综合设计中.故障诊断和修复控制综合设计中的故障参数估计问题实质上是闭环辨识问题,持续激励条件不易满足,尽管可以通过引入特别设计的激励信号[5],达到参数估计的目的,但是对飞行控制系统设计而言这是不合理的,特别是在发生故障的情况下.直接对系统设计高增益观测器,估计故障参数,在不引入故障修复控制律的情况下,可以得到故障参数的真实值;一旦引入修复控制作用,则参数的估计不能得到真实值.考虑到飞机的作动器具有二阶动态特性,将其引入飞机的非线性动态方程中,通过对作动器动态的状态和参数进行联合估计,得到表征故障的参数.
1 问题描述
考虑包含作动器动态的飞机角速率动态方程如下:

式中,x=[p,q,r]T分别为飞机的滚转、俯仰和偏航角速率;f(x)∈R3为非线性向量;g(x)∈R3×3为可逆矩阵;参数λ1≫λ2,λ1≫1;u1为作动器输出;ui为作动器输入.在飞机作动器的二阶动态方程中,λ1=,λ2∈[0.7ωn,1.4ωn],ωn≥20,因此有: λ1/λ2≥14.对于具有五舵面的飞机有如下关系:

利用Backstepping方法[6],可以得到针对不含作动器动态的飞机模型(1a)的基本控制律如下:

式中,k>0的常数对角阵的选取要保证无故障闭环系统的稳定性;xc为角速率的期望值.
通常作动器的故障建模采用零阶动态模型[7]:

式中,D=diag{d1,d2,…,dm},Σ =diag{σ1,σ2,…,σm},di∈[εd,1],εd≪1,i=1,2,…,m.
对于任意一个作动器,其具有二阶动态的故障模型如下:

式中,λ2+≫1;d为故障残存率.式(4)可以涵盖所有的作动器故障,包括卡死、缺损等故障.考虑到σ∈{0,1},σ =σ2,进一步整理,有

类似文献[8],定义 Θ =(Ι-Σ)D,Δ =Σ,则有


2 作动器故障参数辨识
针对二阶系统(6),利用高增益观测器[4]对作动器的状态η及参数ϑ同时进行估计,从而得到故障参数的估计值.定义作动器状态估计误差及故障参数估计误差如下:

定理1 针对作动器二阶系统(6),存在如下高增益观测器:

式中,Λ =diag{1,λ}.则存在正定矩阵 S,满足

及反馈增益矩阵

证明 将故障估计值代入状态估计式,得

定义坐标变换:

注意到矩阵的特殊性,有

将式(13)代入式(12),整理得

其中,非线性项ζ(t)如下:



取 Lyapunov 函数 V(t)= ξT(t)Sξ(t)+,微分整理得

式中,

矩阵S为方程(10)的解,是正定的;根据Υ(t),C的定义,可知2ΥT(t)CTCΥ(t)为标量,且误差向量为一维的,只要2ΥT(t)CTCΥ(t)>0则可以保证矩阵M正定.
若要求2ΥT(t)CTCΥ(t)>0,则只要二维向量Υ(t)=[Υ1Υ2]T的第1项Υ1不恒为零就可以保证2ΥT(t)CTCΥ(t)正定,即满足持续激励条件[9].同时,只要取足够大的λ值就可以保证观测器(9)为系统(7)的渐近观测器.则有成立.定理1 得证.
3 自修复控制律重构方法
根据式(6),λ1≫1,λ1≫λ2,因此有 1/λ1≅0;λ2/λ1≅0.即

将式(21)代入式(1)得

定理2 对于发生如式(6)所示故障的系统(22),可以用如下的修复控制律来修复,使得故障系统接近原有的性能水平

修复控制向量满足下式:

其中,


将式(25)展开,并令
则有

将式(27)代入式(26)中右端后2项整理得

将式(29)代入式(26),有

当发生缺损故障时,C=D≈0,则式(30)退化为




即故障修复后误差系统(32)具有以故障参数估计误差为输入的输入-状态稳定(ISS)性质.故障参数估计误差足够小,则保证故障系统(22)的性能接近原始系统(1)在基本控制律(2)控制下的水平.卡死故障的分析也有类似上面的结论,这里不再详细分析.定理2得证.
4 仿真结果
仿真条件的设定:飞机在基本控制律作用下处于定高9 144 m,以107 m/s的速度匀速飞行,此时攻角α=5°,侧滑角β=0°.飞机的气动参数取自文献[11].高增益观测器的参数选择如下:λ=35,γ0=2.则由方程(11)解得观测器增益:K=[4,4]T.基本控制律参数 k=diag{5,7,2},期望角速率值 xc=0.飞机在第10 s开始进行180°转弯爬升机动动作,假定右副翼在第20 s时突然发生故障:卡死在+2°不能回零.此后仿真继续进行,总共历时60 s,其中前20 s飞机无故障,主要考验自修复控制系统对期望值的跟踪能力;后40 s为自修复控制系统对右副翼卡死在+2°的突发性故障的修复过程.具体仿真曲线见图1~图4.

图1 角速率及法向过载修复过程

图3 舵面偏转及推力

图2 故障参数估计值

图4 修复向量曲线
图1中的实线表示修复曲线,虚线表示仅在基本控制律作用下的角速率曲线.由图1可以看出,在出现卡死故障后,飞机的滚转和偏航角速度出现了振荡,而俯仰角速率和法向负载均出现了小幅振荡,修复后的曲线振荡明显减小.说明本文设计的自修复控制律对卡死故障的修复作用是有效的,修复的过渡过程也比较平稳.图3和图4分别为飞机的控制输入曲线和修复向量,同样说明了修复过程是比较平稳的.从图4可以看出修复向量的变化是比较平稳的.从图2右副翼卡死状态估计曲线可以看出,对于卡死故障本文提出的算法能够在很短的时间内估计出表征卡死故障的指示参数.
作为比较,给出了类似文献[7]中的自适应修复控制律设计方法的仿真曲线,如图5~图7所示.

图5 基于自适应方法的角速率及法向过载修复过程
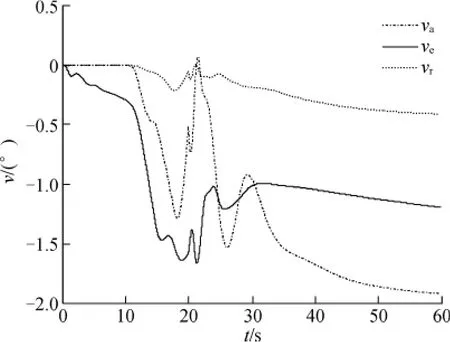
图6 修复向量曲线

图7 自适应参数曲线
由图5和图6可看出,自适应修复控制向量并不是在故障发生后才作用于系统,而是始终对系统产生作用.因为参数自适应律不仅仅是针对故障产生作用,而是只要角速率跟踪存在误差,参数就会进行更新,并且试图减小跟踪误差,直至误差为零,最后停止修复控制律的更新.即从修复控制律或是参数更新律中无法判断哪个作动器发生卡死故障,更不能得到故障的准确信息.
由图7可以看出,自适应参数是稳定有界的.需要说明的是,由图2和图7、图4和图6可以看出,不同于文献[7]的自适应修复控制律设计,本文提出的修复控制向量在故障发生前不对系统产生修复作用,无故障系统只是在基本控制律的作用下运行,只有在发生故障后,修复控制向量才会产生修复作用,补偿故障的影响.
5 结语
本文提出了基本控制律加修复控制向量的自修复控制方案,可以解决作动器发生故障的飞机的角速率跟踪问题.基本控制律通过反步法进行设计.作动器发生故障后,保持基本控制律不变,设计高增益观测器对作动器故障参数进行辨识;利用故障辨识结果构造修复控制向量,并叠加到基本控制律上,以保证故障后系统的跟踪性能.仿真结果表明,故障参数的估计值能够快速收敛到真值,修复控制向量能够将系统性能恢复到无故障时的水平,验证了本文提出的自修复控制方案的有效性.与自适应自修复控制方案相比,本文设计的修复控制向量可以作为判断作动器发生故障的一个依据,进一步可以通过故障参数估计得到故障的相关信息.
References)
[1] Zhang Y M,Jiang J.Bibliographical review on reconfigurable fault-tolerant control system [J].Annual Reviews in Control,2008,32(2):229-252.
[2] Narasimhan S,Vachhani P,Rengaswamy R.New nonlinear residual feedback observer for fault diagnosis in nonlinear systems[J].Automatica,2008,44(9):2222-2229.
[3]Song Y,Campa G,Napolitano M,et al,Online parameter estimation techniques comparison within a fault tolerant flight control system [J].Journal of Guidance,Control,and Dynamics,2002,25(3):528-537.
[4] Xu A P,Zhang Q H.Nonlinear system fault diagnosis based on adaptive estimation[J].Automatica,2004,40(7):1181-1193.
[5]Chen W,Saif M.Adaptive actuator fault detection,isolation and accommodation in uncertain systems[J].International Journal of Control,2007,80(1):45-63.
[6] Farrell J,Sharma M,Polycarpou M.Backstepping-based flight control with adaptive function approximation[J].Journal of Guidance,Control,and Dynamics,2005,28(6):1089-1102.
[7]Tang X D,Tao G,Joshi S M.Adaptive actuator failures compensation for nonlinear MIMO systems with an aircraft control application[J].Automatica,2007,43(11):1869-1883.
[8] Boskovic J D,Redding J,Mehra R K.Robust fault-tolerant flight control using a new failure parameterization[C]//Proceedings of the 2007 American Control Conference.New York,USA,2007:5753-5758.
[9]Besancon G.Parameter/fault estimation in nonlinear systems and adaptive observers[M].Berlin:Springer,2007:211-222.
[10]Krstic M,Kanellakopolous I,Kokotovic P.Nonlinear and adaptive control design[M].New York:Wiley,1995:505-506.
[11] Morelli E A.Global nonlinear parametric modeling with application to F-16 aerodynamics[C]//Proceedings of American Control Conference.Philadelphia,PA,USA,1998:997-1001.
