基于测量报告信号聚类的指纹定位方法
2024-01-09张海永方贤进张恩皖李宝玉彭超穆健翔
张海永,方贤进*,张恩皖,李宝玉,彭超,穆健翔
基于测量报告信号聚类的指纹定位方法
张海永1,2,方贤进1*,张恩皖3,李宝玉2,彭超4,穆健翔2
(1.安徽理工大学 计算机科学与工程学院,安徽 淮南 232001; 2.科大国创云网科技有限公司,合肥 230088; 3.中国移动通信集团安徽有限公司,合肥 230088; 4.国防科技大学 电子对抗学院,合肥 230037)(∗通信作者电子邮箱xjfang@aust.edu.cn)
针对基于加权最近邻(WKNN)和机器学习算法的指纹库定位方法存在精度和定位效率较低的问题,提出一种基于测量报告(MR)信号聚类的指纹定位方法。首先,把MR信号分为室内、道路和室外这3种属性;其次,利用地理信息系统(GIS)信息将栅格分为建筑物、道路和室外子区域,并将不同属性的MR数据落入对应的属性子区域;最后,借助均值(-Means)聚类算法对栅格内的MR信号进行聚类分析,以创建子区域下的虚拟子区域,并采用WKNN算法对MR测试样本进行匹配。此外,利用欧氏距离计算平均定位精度,并通过生产环境的一些MR数据测试了所提方法的定位性能。实验结果表明,所提方法的50 m定位误差占比为71.21%,相较于WKNN算法提升了2.64个百分点;平均定位定位误差为44.73 m,相较于WKNN算法降低了7.60 m。所提方法具备良好的定位精度和效率,可满足生产环境中MR数据的定位需求。
测量报告;定位;信号聚类;加权K最近邻算法;欧氏距离
0 引言
位置能力是运营商数据核心能力之一[1],在对内运维优化、精准营销,对外数据变现、行业应用支撑等[2-3]方面起着至关重要的作用。室外定位方法中,虽然已有基站定位[4]、到达时间(Time Of Arrival, TOA)定位[5]、到达时间差(Time Difference Of Arrival, TDOA)定位[6-7]、到达角度(Angle of Arrival,AOA)定位[8-9]、无线网络技术(Wireless Fidelity,Wi-Fi)定位[10-11]等定位方法,但是在实际应用中,基站定位精度一般在200 m以上,无法满足高精度定位的业务需求;而基于TOA、TDOA定位方法至少需要3个基站才能估算目标位置,AOA定位方法至少需要2个基站才能估算目标位置,且该类方法对数据质量、时间同步要求较高,定位精度较差。Wi-Fi定位方法,需要建设大量的无线接入点(Access Point, AP),投入成本较大,不适合当前室外定位的场景。当前,运营商主流且能够提供较为准确位置能力的技术是基于测量报告(Measurement Report, MR)的指纹定位技术[12]。MR数据可通过无线管理平台进行周期性配置或者事件触发式配置,使手机终端上报毫秒级MR。MR记录了用户手机在业务过程中的主服务小区ID、邻服务小区ID、信号强度、时间提前量和方位角等一系列无线信息,具有更全面、更完整、更易取得的优点。
本文的主要工作如下:
1)提出一种基于MR信号聚类的指纹定位方法,通过对栅格中的信号聚类分析,提升在复杂的地理环境下MR定位的精度。
2)在数据处理过程中,基于信号传播特征,对MR样本数据进行了有效清洗和缺失值处理;并通过对栅格的划分和聚类分析,可以将位置定位至栅格内的任意聚类中心。
3)通过实验证明,将栅格划分更小,仅空间聚类而不考虑信号间特性,并不能提升定位精度;通过栅格中基于信号聚类分析,可以有效提升定位精度,并且保证了定位的性能。
1 相关工作
在运营商位置应用场景中,对MR定位的精度和效率有着明确的要求。为此,众多学者在此方面进行了探索。相较于基于加权最近邻(Weighted-Nearest Neighbor, WKNN)算法[13]实现的MR指纹库定位方式,当前前沿的是利用机器学习算法实现MR指纹库定位精度的提升,Zhang等[14-15]提出了一种上下文感知的定位技术RLoc(context-awaRe telco Localization),该技术引入两阶段自适应隐马尔可夫模型,以计算MR样本序列的置信度,找出有缺陷的MR样本,并计算位置转移的可能性,再通过动态路径规划的方法修复路径缺陷序列,从而提升电信定位精度;然而该技术面对运营商TB级别的MR数据时,计算性能存在着极大的考验。王宁等[16]提出一种基于机器学习算法设计高精度混合定位算法的思想,采用AdaBoost算法对同区域具备定位信息标签的MR数据进行模型训练,该模型可对定位信息缺失的MR数据进行较高精度的定位信息重构,并且具有较好的性能和定位精度;但是该方法基于基站扇区维度的指纹库构建,而一个基站扇区覆盖范围较大,在运营商大数据下,计算复杂度将成倍增长。周志超等[17]提出基于移动蜂窝网的机器学习室外指纹定位方案,通过栅格化和非栅格化两种方式,利用机器学习实现对MR的定位;然而其中基于栅格化的方式只能将定位位置定位于单点位置,存在较大的性能折损,基于非栅格化的方式虽然没有性能折损,但是定位精度较低。
Toril等[18]研究了长期演进(Long Term Evolution, LTE)技术网络道路场景中无线电信号强度波动情况,显示同一地理位置信号电平最高偏差23 dBm。Micheli等[19]分析了手机报告的最小化路测数据,发现阴雨天气会对LTE车载电磁传播产生较大影响。上述研究成果表明,真实环境会对MR定位产生了较大的影响。此外,指纹库建设庞大,针对一个城市需要完成千万数据集的训练,并实现每日百亿次的数据定位能力,对硬件设备和定位性能有着严峻的考验;因此需要在保障定位精度的情况下,实现高效的定位能力,以满足业务需求。
针对上述的需求与挑战,受栅格化的MR指纹库启发,本文设计了一种基于MR信号聚类的指纹定位方法。该方法在原有栅格化的基础上,创新性地引入了建筑物、道路的地理信息系统(Geographic Information System,GIS)数据,将栅格细分为建筑物、道路和室外子区域。考虑不同区域内信号的差异,利用均值(-Means)聚类算法对各个子区域进行聚类计算,各个聚类中心作为定位点。该方法一方面丰富了定位区域,降低了性能折损,提升了定位精度;另一方面具有较高的定位性能,可以满足定位业务性能的需求。
2 MR信号聚类总体框架
MR信号聚类的总体框架如图1所示,主要包含5个模块:MR样本数据集构建模块、MR数据预处理模块、栅格划分模块、MR指纹库构建模块、MR指纹库定位和评估模块。
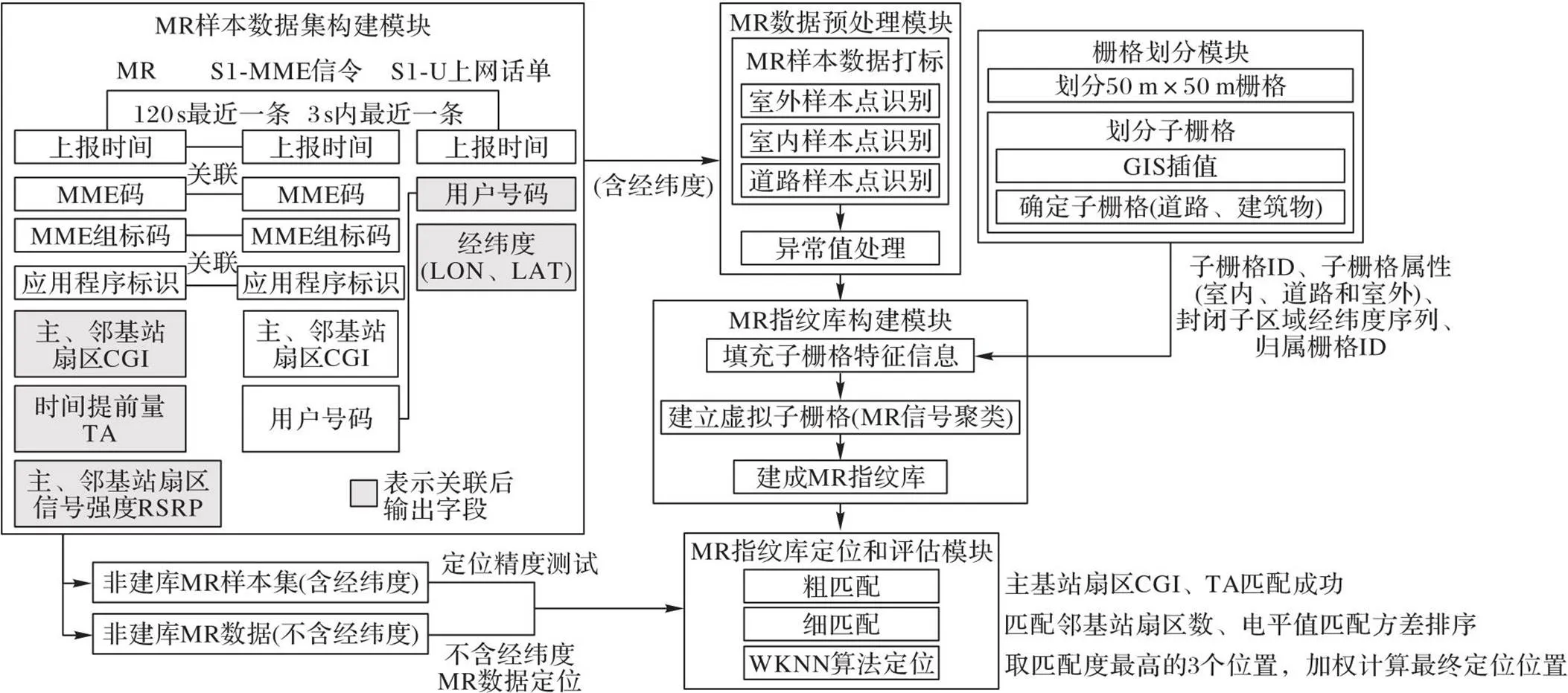
图1 MR信号聚类的总体框架
2.1 MR样本数据集构建模块
由于MR数据没有用户号码和位置信息,需要与S1接口移动管理实体(Mobility Management Entity, MME)信令数据通过三元组(MME码,MME组标码,应用程序标识)进行关联,获取用户号码信息,再通过与S1-U用户上网话单数据中的用户号码进行关联,从而回填部分MR数据的位置信息;然而S1-U上网话单中的位置信息是通过解析用户上网请求过程中上报的位置获得,具有经纬度的S1-U数据不足1%。因此,通过3种数据源的关联,可以构建一定量含有经纬度的MR样本集,样本集包含主、邻全球小区识别码(Cell Global Identifier, CGI)、参考信号接收功率(Reference Signal Receiving Power, RSRP)、时间提前量(Time Advanced, TA)和关联的经度、纬度,用于MR指纹库建库。
本文所用符号说明如表1所示。
2.2 MR数据预处理模块
1)MR样本数据分类。
MR样本点在不同环境下具有不同的地理属性,可以通过位置移动、信号变化和基站类型等进行判断,从而划分MR样本点的地理属性。MR样本点根据地理属性可划分为室内样本点、道路样本点、室外样本点这3种类型。基站类型一般划分为室分基站和室外基站,其中室分基站一般部署在大型写字楼内,覆盖范围较小。MR室内样本点通过判断上报的基站是否为室分基站,确定MR样本点是否为室内样本点。如果没有使用室分基站,由于室内信号在无室分情况下存在信号大幅衰减现象,因此可以通过MR连续信号变化模拟用户进出室内的过程,从而提取MR室内样本点。MR道路样本点则通过用户速度、基站切换、基站的场景和信号稳定性进行判断:通过速度可以识别高速行驶用户;通过基站切换相似度匹配可以获取相似轨迹的用户;通过基站工参部署的场景为地铁,则可以提取地铁线路上的MR样本等。识别以上两种MR室内样本点、MR道路样本点后,其余数据归为MR室外样本点。最终,模型输出为CGI、TA、RSRP、LON、LAT、MR属性(室外样本点、室内样本点、道路样本点)。
2)异常值处理。
基站在城区一般覆盖范围为200~500 m,由于存在过覆盖和信号漂移现象,导致定位点样本经纬度不准确。对此,通过计算基站位置和终端位置计算基站和采集终端的水平位置;再根据基站参数站高,通过勾股定理计算基站到终端的欧氏距离,如图2所示。

图2 信号传播距离模型
Fig.2 Signal propagation distance model
MR中TA可以表示为基站与终端的距离范围。表2为TA值与最大和最小采样时间的关系表[20]。

表2 TA关系
表2中,Ts是LTE中正交频分复用(Orthogonal Frequency Division Multiplexing, OFDM)技术符号快速傅里叶变换(Fast Fourier Transform, FFT)大小为2 048点的采样时间(分辨率),即OFDM时域符号持续时间为2 048 Ts=1 s/15 kHz。由于无线端口与终端的传播速度约为光速,则1 Ts可表示距离(单位:m)为:

因此可计算出:

此处定义合理率,即

2.3 栅格划分模块
栅格划分的一般方式是将地理区域划分成50 m×50 m的栅格,然后对栅格内所有的数据点根据主邻小区进行统计、分组和建模计算,并以栅格的中心点作为定位结果的位置;然而此种方式很容易造成特征失真,定位点单一,且性能折损较大。因此通过引入城市建筑物和道路的GIS信息,并对该GIS数据进行处理和划分,使得栅格具有建筑物、道路和室外属性的子区域,极大丰富了定位位置[21]。
对GIS数据处理步骤如下:
步骤1 获取GIS建筑物和道路数据进行预处理,生成格式化道路和建筑物数据。
步骤2 原始道路数据是一条直线,根据道路的属性进行横向扩展,并形成封闭道路区域。
步骤3 计算栅格与封闭区域交叉点。
步骤4 对栅格边界点数据进行插值填充。
步骤5 判断道路和建筑物与栅格之间是否生成封闭区域:如是,则生成子区域,并遍历该子区域封闭区间点;否则,继续判断是否生成封闭区域。
步骤6 输出所有子区域,栅格划分完成。
最终划分结果如图3所示。模型输出为GRID_ID、GRID_SUB_ID、GRID_SUB_TYPE(室内、室外、道路)、GRID_SUB_ORDER,利用以上输出的GIS信息可以计算MR样本数据所属的栅格子区域。

图3 栅格划分结果
2.4 MR指纹库构建模块
1)填充子栅格特征信息。
根据以上的步骤,将MR数据点分成建筑物、道路和室外这3种类型,并且将栅格内的区域分成了建筑物子区域、道路子区域和室外子区域这3种类型。为了将各数据点匹配到相应区域,需要将MR数据落入对应子区域。首先,针对MR属性和位置属性完全匹配的MR样本点,采用直接落入对应子区域的处理方式;其次,对于MR属性和位置属性不匹配的情况,拓展建筑物和道路区域,计算具有属性的MR样本点距离对应属性子区域的最近距离,并设置对应阈值,保留在阈值内的数据;最后,舍弃落入建筑物和道路子区域但是属性不匹配的MR样本点,保留室外情况的MR样本点,并归为室外数据。最终模型输出为CGI、TA、RSRP、LON、LAT和GRID_SUB_ID。
2)MR信号聚类预处理。
为了满足聚类算法要求,保证数据准确性,需要对缺失值进行处理,应当考虑以下两个准则:
采集准则 MR采集过程中,手机终端上报测量主邻服务小区信号时,采集信号主要来自周边信号较好的小区,如果该信号缺失,可能是由于该CGI信号较弱,因此可以用已有该CGI电平的均值替代缺失值。
聚类算法分类准则 缺失值处理最主要的目的就是统一特征,利用聚类算法实现聚类,所以理论上添加的值与正常的值应该存在明显差异,所以添补值应当与真实值存在差异。
具体处理步骤如下:
步骤1 计算子栅格内MR样本点缺失的CGI、缺失CGI占比和平均电平值_。

表3 w与p的对应关系


3)MR信号聚类。
通过对50 m×50 m的MR栅格中的数据观察,当MR栅格中存在建筑物、高架等复杂环境时,MR信号存在明显的变化和差异。一般MR指纹库建库方法是通过对栅格内的MR数据进行数据汇总统计,或者对区域整体进行机器学习算法分析,忽略了MR栅格中主、邻小区的信号强度的差别,从而提取的MR栅格特征容易存在特征失真,导致定位精度不足或者计算难度较大。为了解决MR栅格中未考虑栅格内复杂环境导致的特征失真、定位位置单一和不适用于实际应用生产中的问题,本文利用-Means聚类算法对子栅格内的MR信号进行聚类分析。


MR信号聚类的算法步骤如下:
步骤1 根据确定子栅格内聚类的簇数。
步骤2 根据子栅格内聚类的簇数,任选其中个点作为起始点,分别计算每行信号的欧氏距离。令某个起始点为第行,则有:

步骤3 根据以上聚类结果,计算每个簇的新的聚类中心。

步骤4 重复步骤2~3,直至小于指定阈值,停止迭代。
计算整个数据集的误差平方和(Sum of Squared Errors,SSE)评价聚类效果,则有:

当聚类结果的SSE的变化小于事先设定阈值时,迭代停止。
-Means的聚类结果受参数的初始设置影响较大,因此有必要对-Means聚类结果进行量化评价。虽然已有了兰德指数、互信息、同质化等聚类量化评价方法,但是针对本模型主要是区分MR栅格内的不同区域的信号差异,避免特征失真,因此度量标准采用将栅格特征建库与MR信号聚类建库结果,通过MR测试数据定位方式,对定位误差进行统计度量,以此说明MR信号聚类的方法的建库有效性。
最终,输出CGI、TA、RSRP、LON、LAT、GRID_SUB_ID和GROUP_ID。
2.5 MR指纹库定位和评估模块
1)MR指纹库定位。
MR样本数据中,存在大量数据缺失经纬度信息,利用MR指纹库对该缺失位置的MR数据进行位置修复。首先,通过粗匹配方法,取出能够匹配上主基站CGI和时间提前量TA的指纹记录;然后,统计匹配邻区数量和计算各个匹配指纹的信号强度方差,进行排序计算;最后,取出排名前3的指纹库记录所在的虚拟子区域(子区域内的簇),通过对3个聚类中心进行加权计算,最终输出最终的MR定位位置。
2)MR指纹库评估。
MR样本数据集中,取出包含经纬度非建库MR数据,进行MR定位,定位结束后,计算原坐标位置与定位位置之间的距离,从而估算定位误差,并计算相关分析指标。
3 实验与结果分析
3.1 实验环境与数据集
本文实验数据来源于安徽移动大数据平台,MR数据由网管平台进行统一管理,通过周期上报或者事件触发方式使用户手机终端上报MR数据,如图4所示。采集到的MR原始文件为压缩文件包,通过对文件的解压、可扩展标记语言(eXtensible Markup Language, XML)文件解析等操作,将格式化的MR文件上传至安徽移动大数据平台,并构建以小时为分区的Hive表,每15 min解析文件6万余个,生成MR数据文件约180 GB。

图4 MR原始数据
本文实验采用安徽移动MR数据进行建模分析,为保障模型的通用性,如图5所示,在城区选取了连续片区7 km2的范围(经度范围117.263°E—117.294°E,纬度范围31.855°N—31.876°N),总栅格数量2 576。通过3个月的数据采集积累,经过数据关联、预处理后共采集MR记录数62 401条。本模型按照5∶1划分训练集和测试集。为保证每个栅格中验证集和测试集的均匀分布,通过栅格ID对栅格内MR数据进行序列排序,采用6次6折交叉验证,整体评估定位精度。虽然MR上报存在随机性,可能会存在栅格内样本点分布不均的情况,但由于模型可根据子栅格内样本点数调整分群数量,因此对模型的整体水平影响可忽略。

图5 测试区域
3.2 评价指标
本文采用位置指纹法中主流的算法——WKNN算法[13],选取与当前MR信号最邻近的个指纹的位置,利用加权平均的方法估计当前位置,简单直观有效。


因此:
3.3 实验结果与分析
由于Spark对大数据处理具有良好的性能,本文使用Hadoop大数据平台,利用分布式计算框架Spark完成聚类、MR指纹库建库及定位测试实验,使用总内存64 GB,CPU核心数4个,单核线程4个。
为了测试-Means分群算法和栅格划分的大小对定位精度的影响,本文设计了4个方案构建MR指纹库,并统计了4个指纹库的定位误差。方案A使用WKNN方法进行定位;方案B使用栅格子区域+WKNN方法进行定位;方案C使用-Means分群+WKNN方法进行定位;方案D使用栅格子区域+-Means分群+WKNN方法进行定位。
通过6次6折交叉验证法,分别统计两种方式下的定位精度,并对相关指标进行了统计,统计结果如表4所示,平均定位误差(Average Positioning Error, APE)为重要的衡量指标。
表4平均定位误差统计 单位:m

Tab.4 Statistics of APE unit:m
实验结果表明,方案A使用WKNN的平均定位误差均值52.33 m,方案D的平均定位误差均值44.73 m,方案D的平均定位误差比方案A使用WKNN建库方法低7.60 m。方案D定位方法定位精度明显提升。
表5不同方案的误差结果分析

Tab.5 Analysis of error results of different schemes

图6 不同方案的聚类定位结果比较
表6不同方案的MR定位结果比较 单位:m

Tab.6 MR positioning results of different schemes unit:m
3.4 定位效率测试
基于以上单机总内存64 GB,CPU核心数为4,单核线程数为4的服务器通过Spark1.6进行定位测试,多次测试完成62 401条记录的时间约为51 s。
为了充分检验本文方法的定位效率,利用安徽移动大数据平台(内存资源约5 TB,Spark任务提交执行器数为250,执行器内存为20 GB,单个执行器核数为2)连续测试7 d的合肥市(每日约15亿条)MR数据定位效率,如表7所示,完成15亿条MR数据的平均定位时间约47.14 min,可以满足安徽移动全省MR定位的业务需求。

表7 MR定位效率分析
3.5 实践与应用
本文方法可以实现对人员位置的精准定位,满足运营商对人员位置、交通流量、弱覆盖、城市热力分析等多方面的应用要求[22]。该方法当前已经应用于安徽移动生产环境,完成每日百亿次定位,精度较高且性能良好,在人员定位、弱覆盖分析、精准营销和职住分析等位置类分析应用中发挥了重大作用。如图7所示,该定位能力可以精准刻画用户轨迹,挖掘用户通勤线路,实现对城市道路交通热力的评估。此外,基于MR中的信号强度、定位位置和GIS信息,可以实现对道路、建筑物信号的分场景评估,实现对城市道路弱覆盖、楼宇弱覆盖的分析,从而协助网优部门实现对特定场景的无线覆盖优化。最后,基于海量的用户位置信息,可以分析城市热力分布,从而为城市规划、智慧城市的建设提供数据支撑。

图7 MR定位应用示例
4 结语
本文提出了基于MR信号聚类的指纹定位方法。首先,创新性地引入了GIS数据,并将MR数据点赋予了室内、道路、室外的属性;其次,对MR数据进行了有效清洗,将MR数据点落入对应属性的子区域,通过-Means聚类算法在复杂的地理环境下实现MR栅格信号特征聚类,从而扩充了MR指纹库定位位置;最后,构建MR指纹库,利用WKNN方法实现MR指纹定位,通过交叉验证法进行对比实验。实验结果表明,基于MR信号聚类的指纹定位方法能够有效地提升MR栅格的定位精度,定位误差50 m内占比71.21%,中值误差22 m,平均定位误差44.73 m,并且具备良好的定位性能。MR高精度定位在人员追踪、交通规划和网络优化等方面发挥着巨大的作用,随着5G建设,5G基站频率高,覆盖范围更小[23],且4G和5G长期协同工作,实现4G、5G协同超高精度定位[24-25]将是下一步的研究方向。
[1] DEL PERAL-ROSADO J D, RAULEFS R, LÓPEZ-SALCEDO J A, et al. Survey of cellular mobile radio localization methods: from 1G to 5G[J]. IEEE Communications Surveys and Tutorials, 2018, 20(2):1124-1148.
[2] 武青. 基于指纹库和无线测量报告的用户定位系统[D]. 北京:北京邮电大学, 2021:1-2.(WU Q. User localization system based on fingerprint database and measurement report[D]. Beijing: Beijing University of Posts and Telecommunications, 2021:1-2.)
[3] 康军,黄山,段宗涛,等.时空轨迹序列模式挖掘方法综述[J]. 计算机应用, 2021, 41(8): 2379-2385.(KANG J, HUANG S, DUAN Z T, et al. Review of spatio-temporal trajectory sequence pattern mining methods[J]. Journal of Computer Applications, 2021, 41(8): 2379-2385.)
[4] 元广杰,李小东,江照意,等.路测数据驱动的移动终端定位方法[J]. 计算机应用, 2016, 36(12): 3515-3520.(YUAN G J, LI X D, JIANG Z Y, et al. Mobile terminal positioning method driven by road test data[J]. Journal of Computer Applications, 2016, 36(12): 3515-3520.)
[5] 张齐林,李方伟,王明月.基于时间反演的到达时间定位[J]. 计算机应用, 2021, 41(3): 820-824.(ZHANG Q L, LI F W, WANG M Y. Time of arrival positioning based on time reversal[J]. Journal of Computer Applications, 2021, 41(3): 820-824.)
[6] LIU Y, GUO F. Performance analysis of TDOA and FDOA estimation for pulse signals[J]. International Journal of Antennas and Propagation, 2022, 2022: No.7672417.
[7] DÍEZ-GONZÁLEZ J, ÁVAREZ R, VERDE P, et al. Analysis of reliable deployment of TDOA local positioning architectures[J]. Neurocomputing, 2022, 484: 149-160.
[8] CHANG A C, CHANG J C. Robust mobile location estimation using hybrid TOA/AOA measurements in cellular systems[J]. Wireless Personal Communications, 2012, 65(1): 1-13.
[9] LI Y Y, QI G Q, SHENG A D. Performance metric on the best achievable accuracy for hybrid TOA/AOA target localization[J]. IEEE Communications Letters, 2018, 22(7): 1474-1477.
[10] ZHOU M, LI Y, TAHIR M J, et al. Integrated statistical test of signal distributions and access point contributions for Wi-Fi indoor localization[J]. IEEE Transactions on Vehicular Technology, 2021, 70(5): 5057-5070.
[11] WANG B, GAN X, LIU X, et al. A novel weighted KNN algorithm based on RSS similarity and position distance for Wi-Fi fingerprint positioning [J]. IEEE Access, 2020,8: 30591-30602.
[12] VO Q D, DE P. A survey of fingerprint-based outdoor localization[J]. IEEE Communications Surveys and Tutorials, 2016, 18(1): 491-506.
[13] ZHANG L, CHU X, ZHAI M. Machine learning-based integrated wireless sensing and positioning for cellular network[J]. IEEE Transactions on Instrumentation and Measurement, 2023, 72: No.5501011.
[14] ZHANG Y, RAO W, YUAN M, et al. Context-aware telco outdoor localization [J]. IEEE Transactions on Mobile Computing, 2022, 21(4): 1211-1225.
[15] ZHANG Y, DING A Y, OTT J, et al. Transfer learning-based outdoor position recovery with cellular data [J]. IEEE Transactions on Mobile Computing, 2021, 20(5): 2094-2110.
[16] 王宁,刘旭峰,贾元启,等. 基于机器学习的LTE-MR定位算法研究与应用范例[J]. 北京交通大学学报, 2021, 45(2): 87-94, 110.(WANG N,LIU X F, JIA Y Q, et al. Algorithm design and application example of machine learning-based LTE-MR positioning technique [J]. Journal of Beijing Jiaotong University, 2021, 45(2): 87-94, 110.)
[17] 周志超,冯毅,夏小涵,等.基于移动蜂窝网的机器学习室外指纹定位方案[J]. 电信科学, 2021, 37(8): 85-95.(ZHOU Z C, FENG Y, XIA X H, et al. Outdoor location scheme with fingerprinting based on machine learning of mobile cellular network[J]. Telecommunications Science, 2021, 37(8): 85-95.)
[18] TORIL M, WILLE V, LUNA-RAMÍREZ S, et al. Characterization of radio signal strength fluctuations in road scenarios for cellular vehicular network planning in LTE [J]. IEEE Access, 2021, 9: 33120-33131.
[19] MICHELI D, MURATORE G, VANNELLI A, et al. Rain effect on 4G LTE in-car electromagnetic propagation analyzed through MDT radio data measurement reported by mobile phones[J]. IEEE Transactions on Antennas and Propagation, 2021, 69(12): 8641-8651.
[20] 中国通信标准化协会. TD-LTE数字蜂窝移动通信网无线操作维护中心(OMC-R)测量报告技术要求: YD/T 2824—2015[S]. 北京:中国标准出版社, 2015:7-8.(China Communications Standards Association. TD-LTE digital cell mobile communications network OMC-R measurement report technical specification: YD/T 2824—2015 [S]. Beijing: Standards Press of China, 2015:7-8.)
[21] 科大国创软件股份有限公司. 一种基于GIS数据进行栅格子区域划分的方法及装置: 201811625700.4[P]. 2019-05-17.(GuoChuang Cloud Technology Company Limited. A method and equipment for dividing grid areas based on GIS data set: 201811625700.4 [P]. 2019-05-17.)
[22] 刘大有,陈慧灵,齐红,等.时空数据挖掘研究进展[J]. 计算机研究与发展, 2013, 50(2): 225-239.(LIU D Y, CHEN H L, QI H, et al. Advances in spatiotemporal data mining[J]. Journal of Computer Research and Development, 2013, 50(2): 225-239.)
[23] 张平,陈昊.面向5G的定位技术研究综述[J]. 北京邮电大学学报, 2018, 41(5): 1-12.(ZHANG P, CHEN H. A survey of positioning technology for 5G [J]. Journal of Beijing University of Posts and Telecommunications, 2018, 41(5): 1-12.)
[24] DWIVEDI S, SHREEVASTAV R, MUNIER F, et al. Positioning in 5G networks[J]. IEEE Communications Magazine, 2021, 59(11): 38-44.
[25] KANHERE O, RAPPAPORT T S. Position location for futuristic cellular communications: 5G and beyond[J]. IEEE Communications Magazine, 2021, 59(1): 70-75.
Fingerprint positioning method based on measurement report signal clustering
ZHANG Haiyong1,2, FANG Xianjin1*, ZHANG Enwan3, LI Baoyu2, PENG Chao4, MU Jianxiang2
(1,,232001,;2,230088,;3,230088,;4,,230037,)
Aiming at the problems of low positioning precision and efficiency of fingerprint positioning methods based on Weighted-Nearest Neighbor (WKNN) and machine learning algorithms, a fingerprint positioning method based on Measurement Report (MR) signal clustering was proposed. Firstly, MR signals were divided into three attributes: indoor, road and outdoor. Then, by using the Geographic Information System (GIS) information, the grids were divided into building, road and outdoor sub-regions, and MR data with different attributes were placed in the sub-regions with corresponding attributes. Finally, with the help of-Means clustering algorithm, MR signals in the grid were clustered and analyzed to create virtual sub-regions under the sub-region, and WKNN algorithm was used to match MR test samples. Besides, the average positioning accuracy was calculated by using the Euclidean distance, and the positioning performance of the proposed method was tested by some MR data in the production environment. Experimental results show that the proportion of 50 m positioning error of the proposed method is 71.21%, which is 2.64 percentage points higher than that of WKNN algorithm, and the average positioning error of the proposed method is 44.73 m, which is 7.60 m lower than that of WKNN algorithm. It can be seen that the proposed method has good positioning precision and efficiency, and can meet the positioning requirements of MR data in the production environment.
Measurement Report (MR); positioning; signal clustering; Weighted K-Nearest Neighbor (WKNN) algorithm; Euclidean distance
This work is partially supported by Anhui University of Science and Technology Innovation Fund (2022CX2129), Research and Development Special Fund of Institute of Environment-friendly Materials and Occupational Health (Wuhu) of Anhui University of Science and Technology (ALW2021YF08).
ZHANG Haiyong, born in 1992, M. S. candidate. His research interests include operator big data, machine learning.
FANG Xianjin, born in 1970, Ph. D., professor. His research interests include privacy protection, artificial intelligence security.
ZHANG Enwan, born in 1982, M. S. His research interests include artificial intelligence, operator big data.
LI Baoyu, born in 1982, M. S. His research interests include artificial intelligence, operator big data.
PENG Chao, born in 1994, M. S. His research interests include complex network, artificial intelligence.
MU Jianxiang, born in 1993. His research interests include operator big data.
TP391.9
A
1001-9081(2023)12-3947-08
10.11772/j.issn.1001-9081.2023010005
2023⁃01⁃04;
2023⁃04⁃23;
2023⁃04⁃24。
安徽理工大学创新基金资助项目(2022CX2129);安徽理工大学环境友好材料与职业健康研究院(芜湖)研发专项基金资助项目(ALW2021YF08)。
张海永(1992—),男,安徽合肥人,硕士研究生,主要研究方向:运营商大数据、机器学习;方贤进(1970—),男,安徽六安人,教授,博士生导师,博士,高级CCF会员,主要研究方向:隐私保护、人工智能安全;张恩皖(1982—),男,安徽合肥人,硕士,主要研究方向:人工智能、运营商大数据;李宝玉(1982—),男,安徽安庆人,硕士,主要研究方向:人工智能、运营商大数据;彭超(1994—),男,安徽合肥人,硕士,主要研究方向:复杂网络、人工智能;穆健翔(1993—),男,安徽阜阳人,主要研究方向:运营商大数据。
