基于深度学习的DPF故障诊断及应用
2022-10-11陈仁祥胡超超赵树恩程德新
陈仁祥,胡超超,孙 健,赵树恩,程德新
(1.重庆交通大学 交通工程应用机器人重庆市工程实验室, 重庆 400074;2.内燃机可靠性国家重点实验室, 山东 潍坊 261061)
0 引言
据生态环境部2021年发布的《中国移动源环境管理年报》[1]:柴油车NOx和颗粒物(particulate matter,PM)排放量分别占中国汽车排放总量的80%和90%以上,其中PM是造成各大城市雾霾、光化学污染的主要原因。柴油颗粒过滤器(diesel particulate filters,DPF)作为一种高效去除PM的技术,已被广泛应用于柴油车PM排放控制[2]。然而在DPF使用过程中,常常会发生堵塞[3]、破损[4]等故障,因此为保证柴油车PM排放满足排放标准限值,对DPF进行及时地故障诊断至关重要。
国内外对DPF的故障诊断方法有:基于专业传感器检测法和基于车载传感器检测法。Youssef等[5]通过烟灰传感器提供的电阻信号生成相关特征,实现对DPF过滤性能的实时诊断。Kontses等[6]基于电阻性PM传感器和DPF等构建仿真模型,通过误差分析,验证了真实驾驶条件下DPF故障诊断的可行性。Sappok等[7]利用射频传感器对DPF内部状态并行地进行多项测量,包括碳载量、灰分、储氨量等,并且即使在发动机关闭状态下也能进行检测与诊断。虽然上述方法能精准地检测PM排放,但只是对PM超出或低于阈值的检测,并不能诊断DPF的具体故障类型,并且专业传感器需额外投入成本,因此一部分学者探究了车载传感器信号与DPF故障之间的联系。姚广涛等[8-9]分别通过DPF前后压力信号的谱能量密度比值和DPF出入口温度信号的幅值特性、时延特性与相关特性来表征DPF故障状态。Liu等[10]验证了DPF前平均排气压力和瞬时排气压力的特征频率幅值作为检测DPF堵塞故障特征参数的可行性。上述研究证实,DPF前后压力信号、温度信号等车载传感器信号中蕴含着表征DPF故障状态的特征参数,并且所提取的特征参数用以DPF故障诊断是可行性的。但上述研究人工提取特征参数过程繁杂,需依赖专家经验,且计算特征参数使用的车载传感器信号种类较少,难以充分表征复杂的DPF故障状态。
目前DPF故障诊断多采用车载自动诊断系统(on-board diagnostics,OBD)[11],但其功能较少、拓展性差,而远程监测系统[12]在OBD的功能基础上还能实现对DPF相关信号的实时监测、历史回放、统计报表等。
针对上述问题,提出基于深度学习的DPF故障诊断方法:通过车载传感器采集发动机转速、DPF压差等5种信号数据,其中发动机转速和排气流量用以表征车辆行驶工况,DPF压差和出入口温度差用以表征DPF故障状态,将5种信号数据进行数据融合后建立样本数据,增强了5种信号数据间的联系,便于挖掘不同行驶工况下的DPF故障状态;利用深度学习特征自提取的优势,提取车辆在不同行驶工况下样本数据中压差或温差表征的DPF故障特征,规避了传统方法中人工提取特征的不足之处;最终实现DPF四类故障状态的端到端诊断。同时为实现所提方法的工程应用,开发了相应的服务器端软件。
1 深度学习网络原理
深度学习旨在以层次化的信息表达并结合海量的训练数据,对更高阶本质特征的信息提取[13]。对于车载传感器采集的一维信号数据,一维卷积神经网络(one dimensional convolutional neural networks,1D-CNN)可以有效地提取其中的DPF故障特征。
1.1 一维卷积神经网络
卷积神经网络(convolutional neural networks,CNN)最早被应用于图像识别领域,具有局部连接、权值共享和降采样等优势[14]。1D-CNN与CNN的主要区别在于:输入的数据维度是一维的,相应的卷积核也是一维卷积核。但其结构与卷积神经网络相似,都是由输入层、卷积层、池化层、全连接层和输出层组成,其中卷积层和池化层是较为重要的部分。
1) 卷积层
卷积层分为两步运算:卷积和激活。由卷积核与前一层输出的特征映射完成卷积运算,再通过激活函数得到本层的特征映射。卷积过程的表达式为:
(1)

激活函数选用线性修正单元(rectified linear unit,ReLU),因其相比sigmoid函数计算量更小且能缓解网络过拟合的发生。激活过程的表达式为:
(2)

2) 池化层
池化层的主要作用是将卷积层输出的特征映射进行降维压缩以减少参数量,同时也具有特征尺度不变性,即降维压缩时去除了冗余信息,留下最能表征原始信息的特征。常用的池化方法有平均池化和最大池化,其中,最大值池化可以有效减少卷积层参数误差造成估计均值的偏移,更多的保留纹理信息,故选用最大池化方法。池化层运算过程的表达式为:
(3)

因此通过多层的卷积与池化,1D-CNN能够提取数据中隐含的特征完成故障诊断任务,但存在单输入的局限性,适用于单输入的故障诊断任务。
1.2 特征融合卷积神经网络
当诊断任务中涉及的样本类型有2种或更多时,1D-CNN需将多种类型的样本数据进行拼接才能作为网络的输入,然而简单地拼接无法充分利用每种样本数据中的特征。因此需构建可同时输入多类型样本数据的特征融合卷积神经网络(feature fusion convolutional neural networks,FF-CNN),其主要利用1D-CNN对诊断任务中涉及的每种样本数据分别提取特征,再将提取到的特征进行融合,最后通过BP神经网络实现故障诊断,实现原理如图1所示。
因此FF-CNN不仅具有1D-CNN的特征提取能力,还能融合多特征实现故障诊断,适用于多输入的故障诊断任务。

图1 特征融合卷积神经网络原理
2 基于深度学习的DPF故障诊断流程
基于深度学习的DPF故障诊断流程如图2,分为训练阶段和诊断阶段两部分。
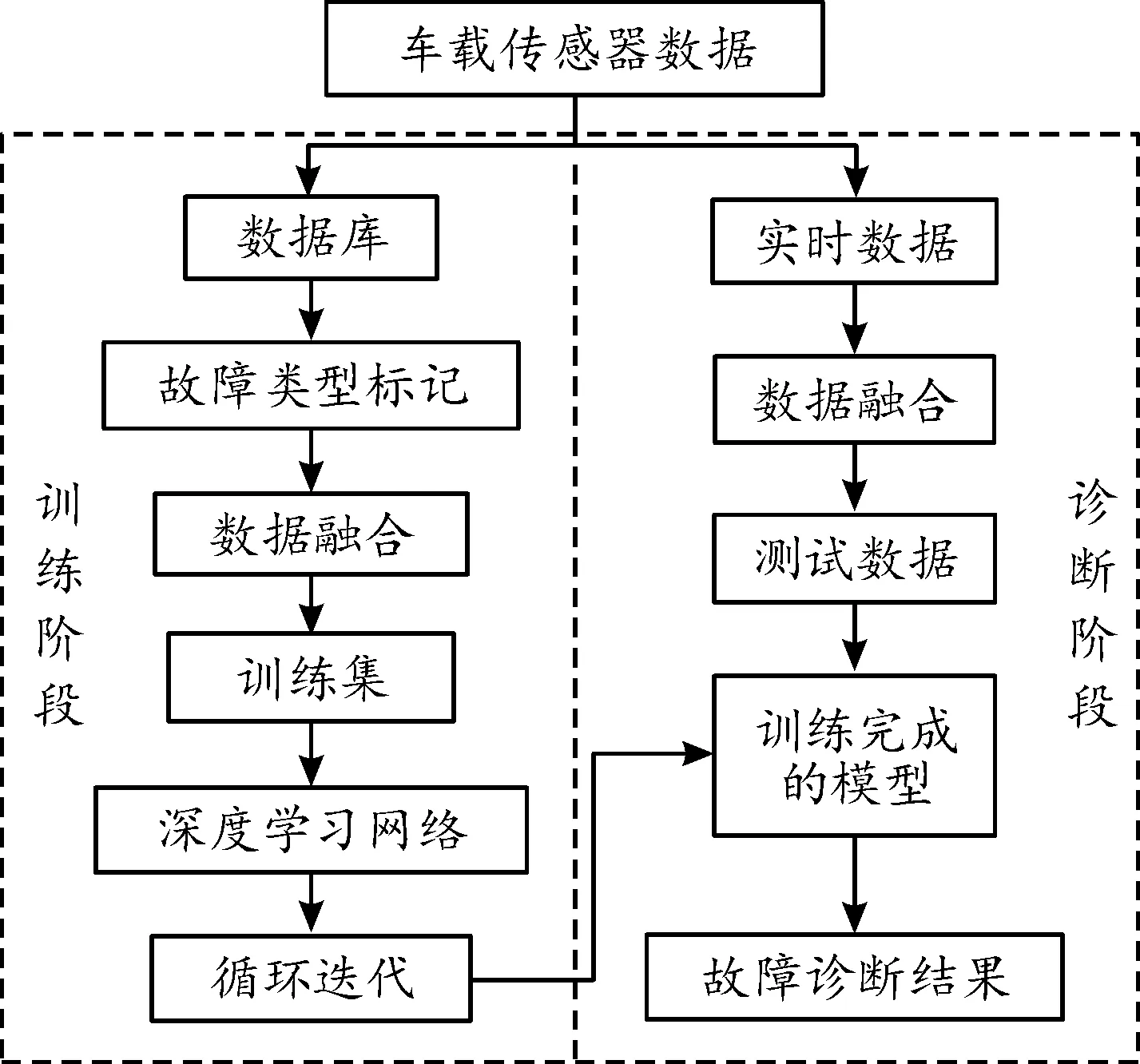
图2 基于深度学习的DPF故障诊断流程
训练阶段步骤如下:
1) 将采集的车载传感器信号数据存入数据库。信号数据共5种:发动机转速、排气流量、DPF压差、DPF入口温度和DPF出口温度;
2) 对信号数据进行故障类型标记。故障类型共4种:正常、堵塞、破损和移除;
3) 考虑到车辆行驶工况对车载传感器信号数据的影响,故需假设在某段时间内车辆行驶工况不变,将该段时间内的5种信号数据进行数据融合得到一组样本数据,其中发动机转速和排气流量用以表征车辆行驶工况,DPF压差和出入口温度差用以表征DPF故障状态;
4) 选择适当组数的样本数据构建成训练集,设置合适的超参数后,即可将训练集送入深度学习网络中进行训练;
5) 通过循环迭代与参数优化,网络的准确率曲线和损失曲线最终收敛至准确率高、损失小,即可得到完成训练的模型。
诊断阶段:首先,接收由车辆发送的未标记的实时数据;其次,实时数据经数据融合后得到测试数据;最后,将测试数据输入完成训练的模型即可得到故障诊断结果。
3 基于深度学习的DPF故障诊断实验
3.1 实验平台
实验平台:Win10操作系统;CPU为英特尔 Core i5-10400F @ 2.90 GHz 六核;显卡为Nvidia GeForce GTX 960(2 GB);运行内存16 GB。深度学习框架为Python 3.8上的Pytorch 1.8.1。
实验超参数设置:迭代次数为300次;学习率为0.001;批量大小为64;优化器选择为Adam。
3.2 实验数据
利用仿真软件GT-Power,根据潍柴某型号柴油机后处理系统的台架实验数据对仿真模型进行校准后,得到原始仿真数据,包含五种信号数据:发动机转速、排气流量、DPF压差、DPF入口温度和DPF出口温度。再参考国Ⅵ标准[15],假设在15 s内车辆行驶工况不变,截取同一15 s时间段内的5种信号数据进行数据融合得到一组样本数据,采样频率为10 Hz,因此样本数据中每种信号数据的长度为150,具体样本数据信息如表1所示。
故障类型正常和堵塞由仿真模型中设置不同的DPF碳载量进行划分;通过增加DPF通道数模拟破损;移除则用空管代替DPF来模拟。

表1 样本数据信息
在后续的实验中样本类型划分为3种:压差类(P)、温差类(T)和压差+温差类(P+T)。P融合的信号数据有:发动机转速、排气流量和DPF压差,通过压差表征不同车辆运行工况下的DPF故障特征;T融合的信号数据有:发动机转速、排气流量、DPF温差(DPF出口温度减DPF入口温度),通过温差表征不同车辆运行工况下的DPF故障特征;P+T融合的则是所有信号数据,通过压差和温差同时表征不同车辆运行工况下的DPF故障特征。实验中,所有数据按4∶1随机划分为训练集和测试集。
3.3 实验网络结构
1) 一维卷积神经网络
考虑到不同卷积层和池化层层数对数据特征提取的影响,分别构建了一层、两层、三层卷积层和池化层的1D-CNN(三层之后,数据长度过短,不宜再加层数),分别命名为1D-CNN1、1D-CNN2和1D-CNN3。
实验使用仿真数据对3种网络进行训练与测试,以样本类型P+T为例,1D-CNN1、1D-CNN2和1D-CNN3的训练准确率如图3所示,在150次的迭代过程中,1D-CNN1的训练准确率曲线一直位于最下方,效果较差;1D-CNN2的训练准确率曲线位处居中,准确率达90%左右;而1D-CNN3的训练准确率曲线一直位于最上方,效果最佳。这主要是因为随着卷积层和池化层的增加,1D-CNN对数据中DPF故障特征信息的学习能力也在不断增强。
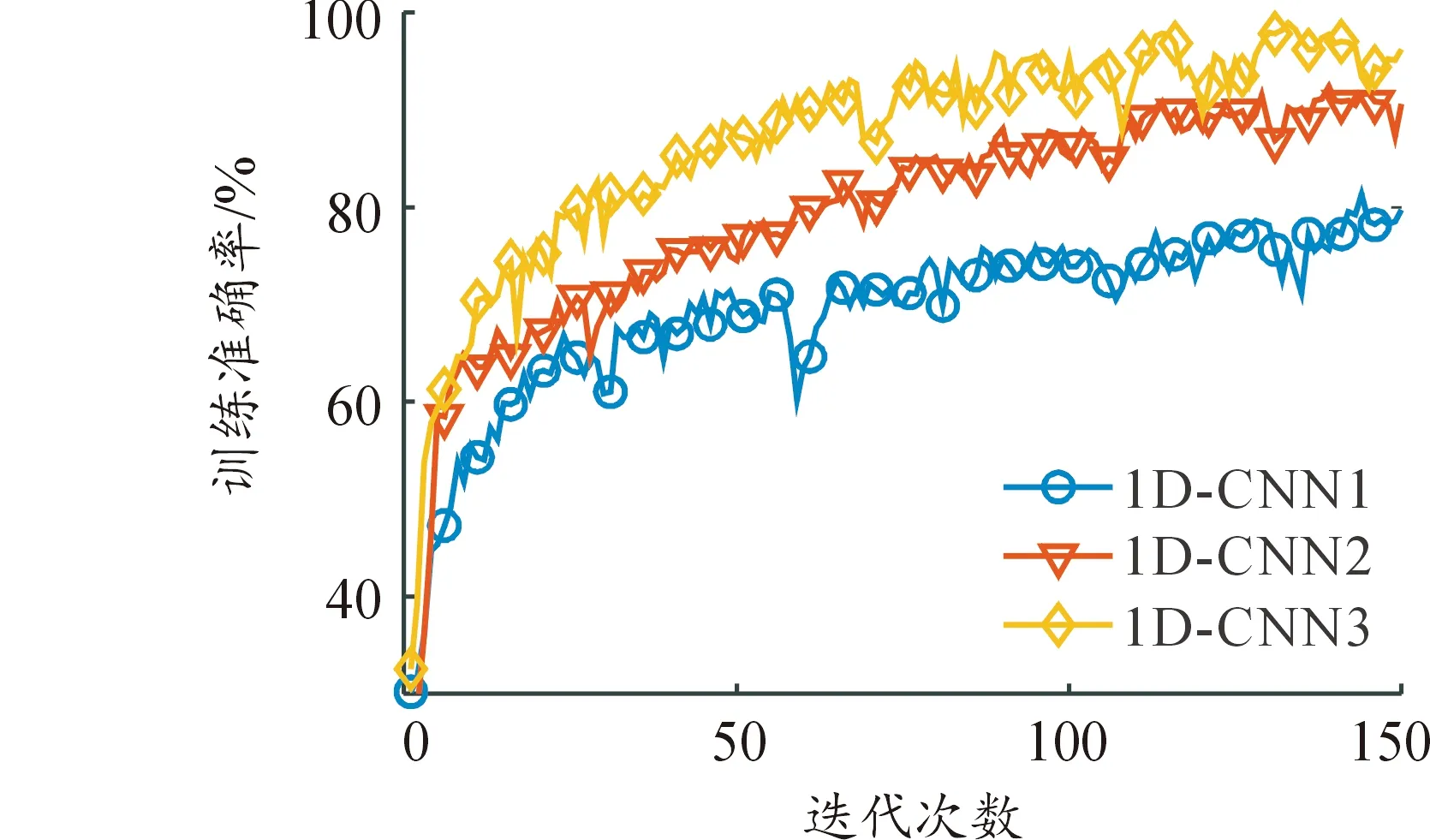
图3 不同卷积和池化层数的训练准确率曲线
实验结果信息记录于表2,从表中可以看出,随着卷积和池化层数的增加,训练耗时会有所增加,这是因为增加层数后,网络的参数量也会相应增加,导致网络训练时耗时增加。虽然1D-CNN3的训练耗时稍多于其他2个网络,但它的训练准确率和测试准确率最高,分为为95.09%,92.21%,故将1D-CNN3作为FF-CNN中的构建特征提取网络的参考。(后文中提到的1D-CNN即为本小节中的1D-CNN3)

表2 不同卷积和池化层数的实验结果
1D-CNN主要由三层卷积与池化层以及两层全连接层构成,当输入样本类型为P+T时,网络具体结构参数如图4所示。

图4 1D-CNN结构
2) 特征融合卷积神经网络
在DPF故障诊断任务中有2种样本类型,为充分利用这2种类型数据中的特征信息,FF-CNN采用1D-CNN分别对数据P和T进行特征提取,将提取的特征展平后融合,最后同样接两层全连接层以实现DPF故障诊断,网络具体结构参数如图5所示。
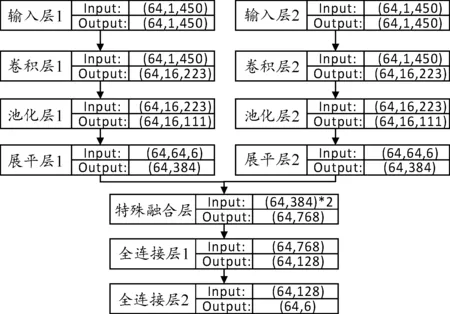
图5 FF-CNN结构
3.4 实验结果
为探究不同网络以及不同样本类型对DPF故障诊断准确率的影响,将输入3种样本类型的1D-CNN与FF-CNN进行对比实验。同样使用仿真数据分别对四种网络进行训练与验证,得到它们的训练准确率曲线如图6所示,实验结果如表3所示。
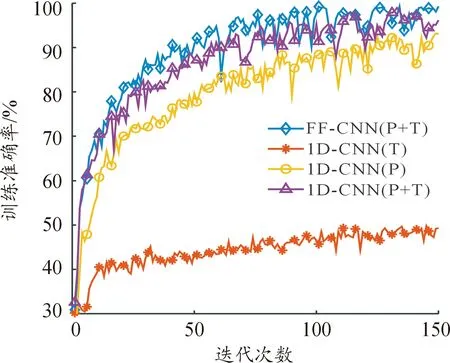
图6 不同样本类型与网络的训练准确率曲线
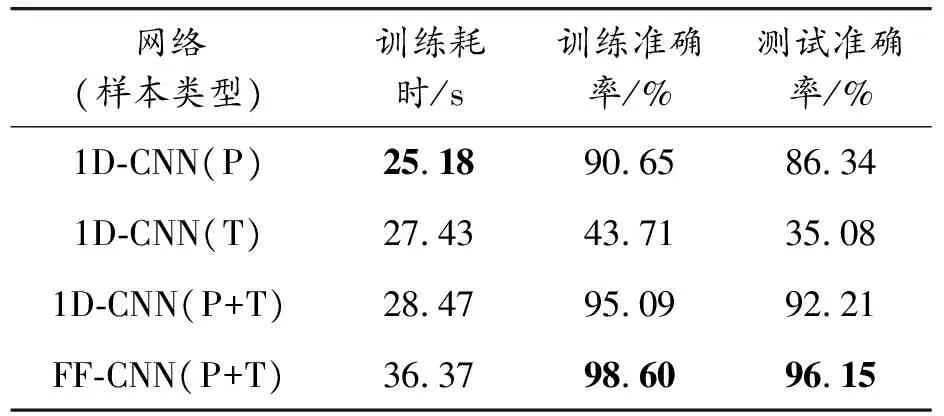
表3 不同样本类型与网络的实验结果
从图6和表3中可以看出,只采用单一样本类型作为模型输入时,1D-CNN的训练准确率和测试准确率均较差,尤其是样本类型T,难以区分四种故障类型,样本类型P相对较好;而采用样本类型P+T时,训练准确率和测试准确率都有一定的提升,分别达95.09%和92.21%,说明样本类型T虽然作为单一输入时效果较差,但对提升模型的诊断准确率也起到了作用。再对比输入样本类型P+T时2种网络的实验结果,1D-CNN训练耗时较少,训练准确率和测试准确率也较高,而FF-CNN的训练耗时虽然多了8 s左右,但训练准确率和测试准确率达到了更高的98.60%和96.15%,是实验结果中最好的,说明通过1D-CNN分别提取压差和温差特征后进行融合得到的特征能够更好地诊断DPF故障状态。
综上所述,通过1D-CNN对每种类型数据分别提取特征的FF-CNN更适合DPF故障诊断任务。然而在实际工程中存在可采集的车载传感器信号数据单一的情况,FF-CNN无法使用,故在后续的软件中1D-CNN和FF-CNN均可供选择。
4 软件开发及应用
为便于后处理系统关键零部件故障诊断和数据可视化,设计开发了柴油机后处理系统故障诊断软件,该软件以SQL Sever为后台数据库,基于Python语言完成对深度学习网络搭建并进行封装,采用C/S架构,在VS2019平台上运用 C#语言开发而成。DPF故障诊断可作为该软件的功能之一,通过读取DPF温度、压力传感器信号、原排体积流量和发动机运行数据等,利用软件的专业性和便捷性,实现对DPF的状态监测与故障诊断。
4.1 软件总体架构
软件总体上可分为数据管理模块、波形展示模块、模型训练模块、故障诊断模块和辅助管理模块。所有功模块都以SQL Server数据库为数据存储交互介质,如图7所示。
1) 数据管理模块
数据管理为该软件最为常用的功能,包括对车载传感器信号数据的导入、数据的预处理和对原始数据的标记以作为训练样本。

图7 柴油机后处理系统故障诊断系统软件总体架构
2) 波形展示模块
不同数据的变化特征对柴油机后处理系统故障有着不同的表现形式,因此该软件设计了波形展示模块,实现对原始数据库和样本数据库中数据的时域波形展示。在展示波形的同时,附有每条数据的具体信息,并且可以对波形上的各个点实现读数功能以及对整条数据的时域统计量汇总。
3) 模型训练模块
模型训练模块因其涉及到深度学习网络模型训练的规范性,该功能只对专业人员开放。其中数据样本导入,是将样本数据库中的样本数据提取作为故障诊断模型的训练样本和验证样本;在选择模型并设置超参数后即可开始模型训练,模型训练完成后会显示训练过程信息,训练过程较为繁琐,需要不断对模型和超参数等进行调整,待到训练出验证准确率较高的模型时,可将该模型进行保存,为故障诊断提供可靠的保证。
4) 故障诊断模块
故障诊断模块是该软件最重要的功能,包括实时数据的导入、故障诊断和诊断信息自动保存。故障诊断逻辑如图8所示,选择已完成训练的模型后,可以对实时导入的数据实现故障诊断功能。在每次完成诊断后,软件会自动保存该次诊断信息和结果,方便管理人员后续信息查询。
5) 辅助管理模块
出于安全性和可维护性考虑,该软件具备辅助管理模块,包括用户管理、数据库管理。用户管理提供用户的注册和登录验证功能,用户注册后需通过管理员的审核才能使用账号,用户登录时需在数据库中验证该账户信息。用户权限分为3个等级,分别是管理员权限、专业权限和普通权限。其中用户管理功能只有管理员权限才能使用;模型训练模块只有专业权限才能使用;普通权限则只能使用除用户管理功能和模型训练模块之外的功能。数据库管理提供基本的数据库维护操作,包括数据库新建、附加、分离、备份和还原等功能。
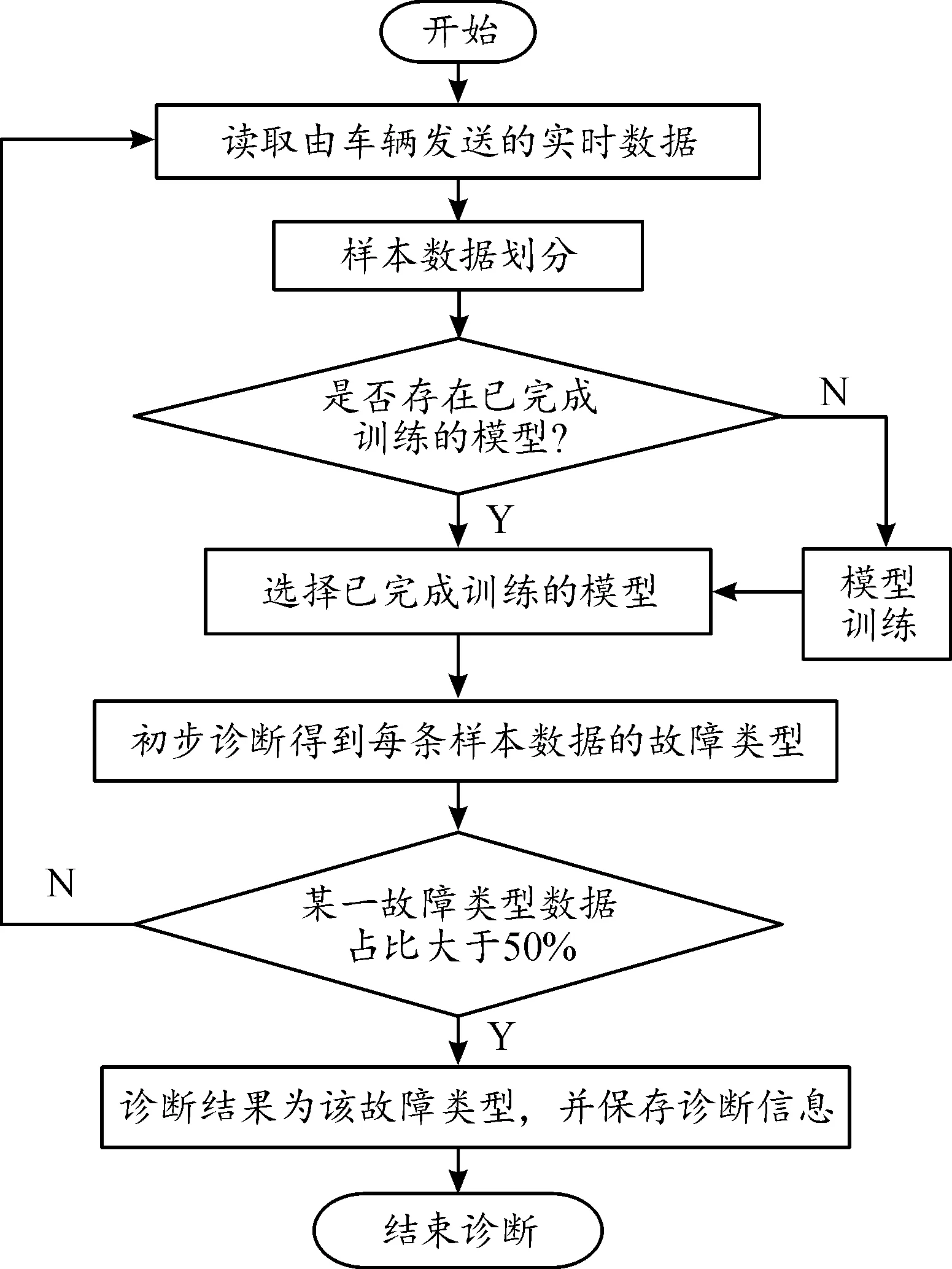
图8 故障诊断流程逻辑框图
4.2 软件功能验证及应用
所开发软件的主界面,如图9所示,分为标题栏、菜单栏、数据树状表和工作区4个区域。其中,标题栏显示软件名称“柴油机后处理系统故障诊断系统”和当前工作区内子窗体的名称;菜单栏包括软件所有功能的操作菜单项;数据树状表显示当前数据库中所有的原始数据和样本数据;工作区用于用户可在此区域操作一系列该软件的功能。

图9 软件主界面
①为验证所开发软件的DPF故障诊断功能,对模型训练和故障诊断2个关键模块进行分析。
1) 模型训练
专业用户在菜单栏中点击模型训练功能后,软件工作区内会呈现出模型训练的工作界面。在开始模型训练之前,首先需要选择训练模型和样本类型;其次导入样本数据,完成导入的样本数据会在“已选训练样本:”下方展示;最后,完成设置模型训练相关的超参数后即可开始训练。稍等片刻后,会弹出训练准确率与损失曲线的窗体,表示训练已经完成,同时在“训练过程信息:”下方也会显示出此次训练过程的具体信息,如图10所示。在用户训练得到比较满意的模型后,可对此次训练完成的模型进行保存,作为后续故障诊断的模型。
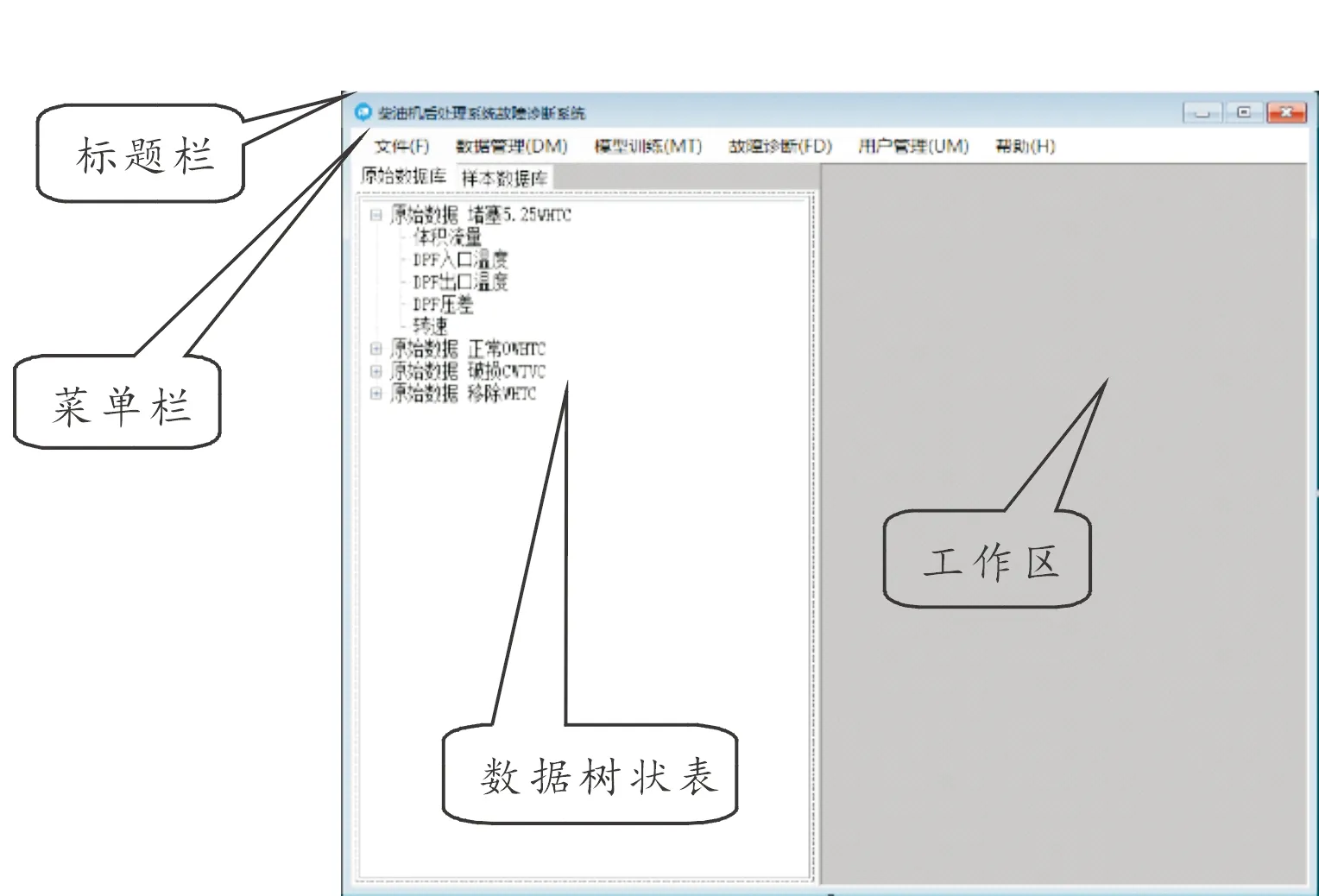
图10 模型训练工作界面
2) 故障诊断
用户在菜单栏中点击故障诊断功能后,软件工作区内会呈现出故障诊断的工作界面。首先需要选择诊断模型类型以及相应的样本类型和数据长度;然后选择已训练完成的诊断模型文件和需诊断的数据文件(模拟实时数据的导入);最后点击开始诊断,会弹出一个诊断结果窗体,并且在“诊断信息”下方也会显示诊断结果,如图11所示。
5 结论
1) 车载传感器采集的信号数据通过数据融合后划分为3种样本类型:T、P和T+P,在实验中作为1D-CNN的输入,对比发现T优于P,T+P最优,说明T和P对DPF故障诊断准确率有着不同效果的提升。
2) 提出了基于深度学习的DPF故障诊断方法,即通过深度学习网络充分学习DPF压差、出入口温度差、发动机转速、排气流量等与DPF故障间的映射关系,避免了传统人工提取特征的不足,获得了DPF故障诊断满意结果。
3) 为便于后处理系统关键零部件故障诊断和数据可视化,设计开发了柴油机后处理系统故障诊断软件,将1D-CNN和FF-CNN作为诊断网络供用户选择:1D-CNN适用于单输入的故障诊断任务,FF-CNN适用于多输入的故障诊断任务。本文研究的DPF故障诊断方法为该软件的一部分功能。