模糊自整定PID对开关磁阻电机转矩脉动抑制
2022-10-11安治国张东阳王龙轩
安治国,张 振,张东阳,王龙轩
(重庆交通大学 机电与车辆工程学院, 重庆 400074)
0 引言
开关磁阻电机(SRM)具有鲁棒强、控制灵活、运行可靠、调速方便以及成本低廉等优点,被广泛应用于航空航天、新能源汽车及通用工业等诸多领域[1-4]。开关磁阻电机的双凸极结构,使得磁通波路径分布非线性,相电感参数非线性化,很难建立与转子位置角的函数关系,而电磁转矩又是电感与电流的函数,因此电磁转矩难以调节。由于转矩-电流-角度非线特性的特点,使其在低速和换相期的转矩脉动较大,从而引起较大的振动与噪声,这就限制了开关磁阻电机在NVH性能要求较高领域的应用[5]。
目前对于转矩脉动的优化主要集中在结构和控制2个方面[6]。其中,控制方法的优化可以在不改变电机结构的情况下,优化转矩脉动,减少振动于噪声,因此受到广泛关注。
文献[7]提出了一种无差拍转矩控制结合磁链控制的控制策略,以此来提高对转矩和磁链的准确控制。文献[8]为了实现对转矩和磁链的精准控制,采用傅立叶级数形式建立非线性转矩模型以实现转矩控制,能够有效抑制转矩脉动,但是在电机低速运行的效果不明显。文献[9]提出在电动汽车SRM直接瞬时转矩控制策略上加入线转矩估计器和一个转矩误差补偿器,通过仿真验证了此策略对低速时的转矩脉动抑制效果明显。文献[10-11]分别提出了脉宽调制结合直接瞬时转矩的控制方法及分段占空比PWM的方法,对电机每相占空比进行准确控制,但是占空比的选取依赖电机的结构参数,在实际操作中难以实现。文献[12]对直接转矩控制和转矩分配控制2种控制策略进行了对比分析,表明在无法获取磁链特性的情况下,转矩分配函数具有更好的控制效果。文献[13]提出将电流分配和磁链分配结合,以此来实现对电流和磁链的直接控制,实现更高的控制灵敏度,但是难以获得电流的非线性关系,控制效果不甚理想。文献[14]提出了在直接瞬时转矩控制基础上引入分数阶积分,仿真表明提出的模糊分数阶PID双闭环控制器能够减少转矩脉动,加快系统响应,但是会减小电机运行的稳定性。文献[15]提出了一种高性能的间接控制方案来抑制转矩脉动,通过获得最优的电流分布,准确跟踪电流,减小纹波从而抑制转矩脉动。文献[16]提出了一种改进的电动汽车开关磁阻电机间接瞬时转矩控制(IITC)策略,通过引入改进的力矩共享函数,并采用粒子群优化算法(PSO),确定了传统智能控制系统的最优控制参数。仿真结果表明了所提控制方法在变速范围内的可行性和有效性,但是无法补偿非线性关系。文献[17-20]提出了运用DITC策略减少转矩脉动,通过直接对转矩的控制来加快系统响应,很好的抑制了转矩的脉动,但是无法精准跟踪电流,会出现较大的电流峰值。
综上所述,直接转矩控制策略对转矩脉动抑制效果较好,但是会减小电机运行时的稳定性,对于制造要求比较高,并且会降低低速运行的效率;转矩分配控制需要获得复杂的分配函数,增加了算法的复杂程度。为了克服以上困难,将传统PWM控制方法与智能算法相结合的研究被研究人员广泛关注。为此,本文提出了一种模糊自整定PID与脉宽调制(PWM)相结合的控制方法。
1 模型与方法
1.1 SRM数学模型
1) 电压回路方程。
开关磁阻电机的电压回路方程如式所示
(1)
式中:U为绕组端电压;R为绕组电阻;i为绕组电流;ψ绕组磁链;θ为转子位置角。
考虑各相绕组间互感较小,公式可以进一步写为
(2)
式中,ω为机械角速度。
2) 机械运动方程。
根据力学定律转矩平衡方程
(3)
式中:TL为负载转矩;J为转动惯量;B为摩擦因数。
当电机运行稳定后,公式为
(4)
电机每相运动一个周期的总机械能为
(5)
绕组的磁共能为
(6)
当电流恒定时,瞬时转矩为
(7)
当忽略磁链饱和电磁转矩可以简化为

(8)
1.2 电流斩波控制方法
传统的电流斩波控制系统主要包括电机、功率变换器、转速检测、电流检测、PI控制器等,转速误差经过PI控制器产生参考电流,参考电流与瞬时电流的偏差经过电流滞环控制单元,产生信号作用在功率转换器上,从而实现控制电流斩波控制,控制框图如图1所示。
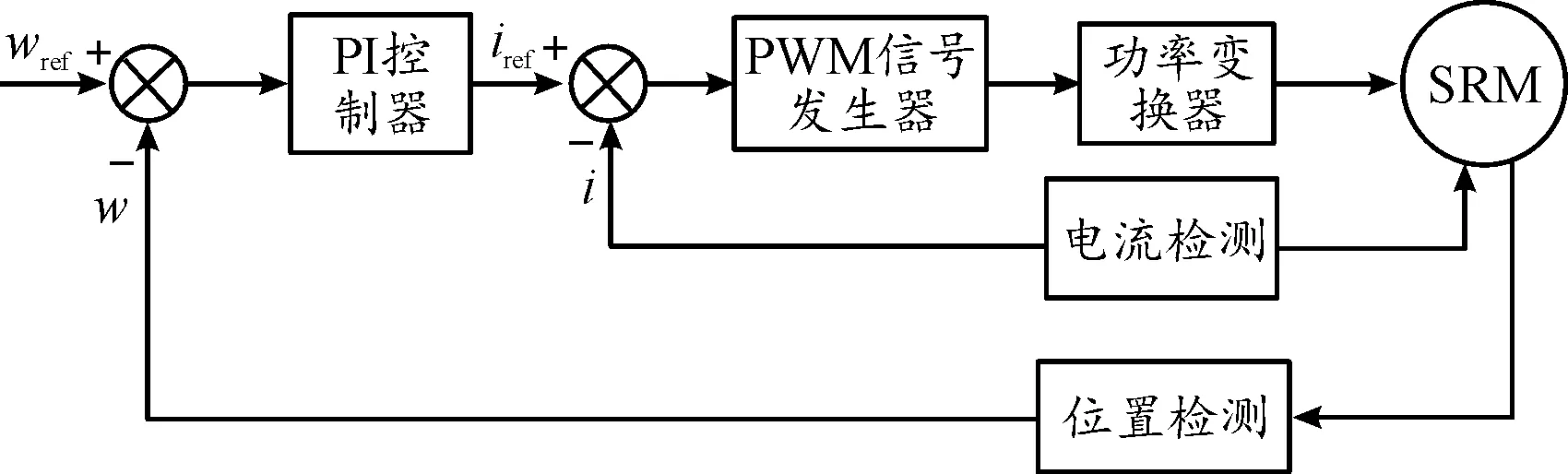
图1 传统PWM控制框图
电流斩波控制不依赖控制对象的数学模型,电机的施加电压、开通角以及关断角保持不变,通过反馈转速和反馈电流来实现双闭环控制,用反馈值与给定值的误差上下限对开关进行导通和关断,从而实现将电流值控制在所要求的范围内。根据开关磁阻电机的工作原理可知,电感变化率在电感上升开始和结束的区间比较小,这一区间电流也比较小,并造成绕组输出的瞬时转矩减小,引起转矩脉动。在仿真过程中,相电流的值是采样获得的离散值,因此不对称半桥驱动电路接收到的开关信号相对于电流的变化会有所滞后,在控制过程中电流变化太快,会出现在滞环区间之外的情况,因此产生较大的电流脉动。
1.3 模糊自整定PID控制器
模糊自整定PID控制器主要是根据转速的误差来自动调节PID控制器的参数,通过一定的规则实时对隶属函数进行修改,使电机各相在符合要求的区域导通,并且在电机工作中对电机参数实时调整以获得最优控制。其控制原理如图2所示。模糊自整定PID控制算法的流程如图3所示。

图2 模糊自整定PID控制器原理图

图3 控制算法流程框图
模糊自整定PID控制离散算法为
(9)
式中:k为采样系数;T为采样周期;e为误差。
控制器以电机转速误差e和转速误差变化ec作为控制器的输入,利用模糊规则对控制器参数进行修改。
PID参数kp、ki和kd应用模糊合成推理进行设计,第k个采样时间的整定为:
kp(k)=kpo+Δkp(k)
(10)
ki(k)=kio+Δki(k)
(11)
kd(k)=kdo+Δkd(k)
(12)
在第k周期,对电机的运行状态进行采样,获取电机的瞬时转速信息,得到此时误差e以及ec,将其关系进行模糊化,根据模糊规则对进行整定,计算当前时刻的PID参数控制输出u(k)。
2 模糊自整定PID控制器设计
2.1 模糊控制系统的建立
模糊自整定PID控制系统如图4所示。

图4 模糊自整定PID控制系统框图
控制系统主要由2部分组成,模糊自整定PID控制器和PWM信号发生器,模糊自整定PID输入电机转速信息根据模糊规则输出参考电流,同时电流检测单元对输出电流进行检测,与输出的参考电流比较求出误差,并输出电流信号。PWM信号发生器根据输出的电流信号发出控制信号,从而控制电机工作。
2.2 隶属函数建立
隶属函数的选取对结果影响比较大,根据具体要求采用分布比较均匀的三角形函数。电机给定转速设为800、1 000、1 200和1 400 r/min,以1 200 r/min为例设定隶属函数。在控制器中基本论域是输入量的变化范围,2种工况对应的输入e和ec的基本论域取为[-1 200,1 200]。输入量e和ec是准确值,将其转化为模糊量E和EC,设定E、EC和输出U的模糊论域为[-6,6],在语言值的模糊子集为:
E、EC={NB,NM,NS,ZO,PS,PM,PB}E、EC、U的隶属函数如图5所示。

图5 E、EC、U的隶属函数
2.3 模糊控制规则的建立
模糊控制的语言规则可以描述如下:
1) 当电机工作时获取的瞬时转速小于给定值时,模糊自整定PID控制器输出电流值,该电流为期望电流值,期望电流值减小,期望电流值减小的幅度与转速偏差成正比。
2) 当电机工作时获取的瞬时转速为给定值时,期望电流值保持不变。
3) 当电机工作时获取的瞬时转速小于给定值时,期望电流值增加,期望电流值增大的幅度与转速偏差成正比。
根据规则修正表如表1—3所示。
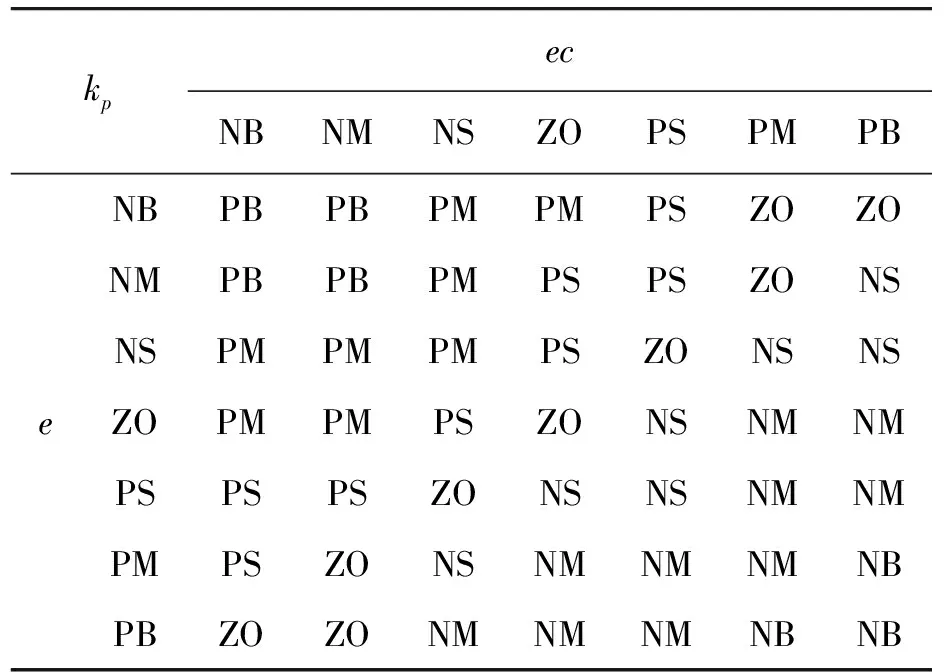
表1 kp的修正规则表
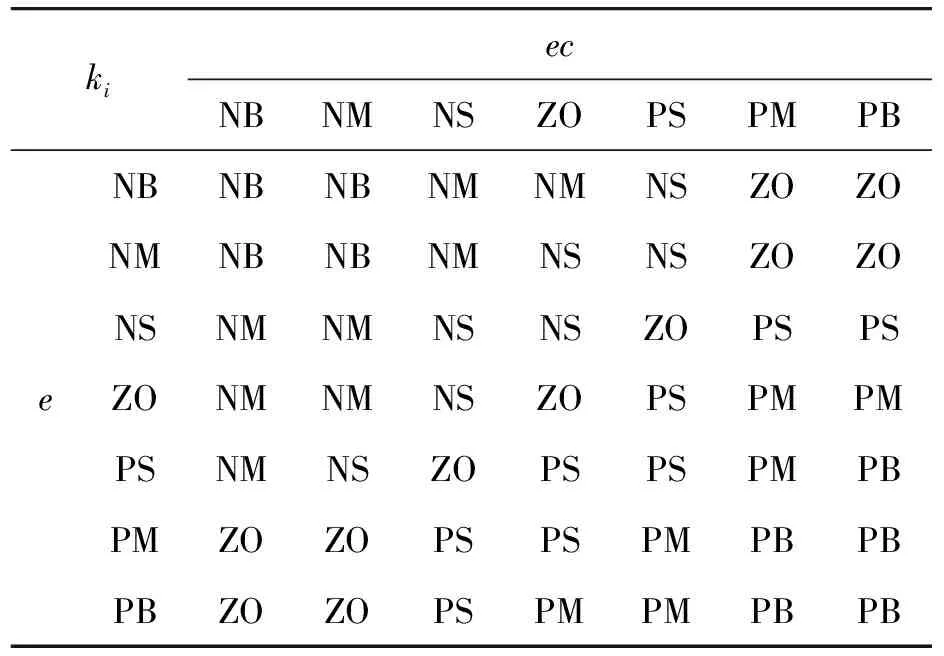
表2 ki的修正规则表

表3 kd的修正规则表
3 结果与讨论
利用Matlab/Simulink仿真平台,把模糊自整定PID与传统的电流斩波进行对比,在0.1 s后加入50 N·m的负载力矩。电机采用三相6/4开关磁阻电机,额定功率为60 kW,额定电压120 V,转速设定为分别800、1 000、1 200及1 400 r/min。
为了便于分析转矩脉动的程度,定义Kt为转矩脉动
Kt=(Tmax-Tmin)/Tav
(13)
式中:Tmax为电机稳定工作后的最大瞬时转矩;Tmin为最小瞬时转矩;Tav为平均转矩。
Kt值越小说明对电机转矩脉动的抑制效果越好。
由图6—9可知当电机分别以800、1 000、1 200和1 400 r/min工作时的转矩波形和电流波形。在负载加入的起始阶段模糊自整定PID控制器能够很好的减小脉动,防止在起始瞬间产生较大的脉动,稳定工作后传统PID控制的转矩最大值分别为82、82、85、98 N·m,Kt分别为0.92、0.73、0.69、0.84。模糊自整定PID控制的转矩最大值分别为78、64、70、89 N·m,Kt分别为0.68、0.58、0.59、0.73。

图6 转速800 r/min波形对比

图7 转速1 000 r/min波形对比
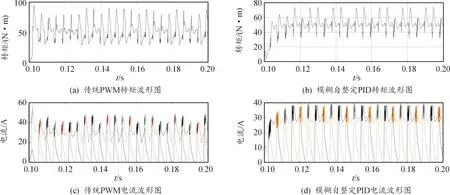
图8 转速1 200 r/min波形对比

图9 转速1 400 r/min波形对比
不同参考转速下的对比结果如表4所示,Imax1传统PWM的电流峰值,Imax2为模糊自整定的PWM电流峰值,ΔImax为电流峰值的差值,Tmax1传统PWM的转矩峰值,Tmax2模糊自整定PWM的转矩峰值,ΔTmax为转矩峰值的差值,Kt1传统PWM的转矩脉动,Kt2为模糊自整定的PWM转矩脉动,ΔKt为转矩脉动的差值。

表4 2种控制方法对比分析
由表4可知,提出的模糊自整定PID的PWM的控制方法相对于传统的PWM方法对在不同转速下都可以减少电流峰值,在转速为800和 1 000 r/min时电流峰值分别减少了8 A和5 A,在其他转速也有不同程度的降低。当电机以1 000 r/min工作时转矩最大值减小了18 N·m,转矩脉动在800 r/min时优化了0.24,在其他转速均有很好的优化效果。
在传统的PWM控制方式下,传统的PID控制器的参数为定值,无法实时地跟随转速的波动,电流和转矩的波动比较大。在负载刚加入的时候转矩急剧上升,当转速在1 200 r/min时还会出现较大的初始转矩脉动,在换向时转矩脉动也比较大。模糊自整定PID控制策略可以根据实时的转速信息调节PID的参数,加入负载后以及换向时转矩能很好地过渡,防止过大的转矩脉动和电流峰值。
4 结论
针对传统PWM控制策略转矩脉动较大,提出了一种结合模糊自整定PID的PWM方法,基于Matlab/Simulink平台搭建了电机控制策略仿真模型,利用模糊规则获取参考电流,将电流作为控制量,产生控制信号作用在功率变换器上,并与传统PID的PWM控制进行对比分析,得出以下结论:
1) 模糊自整定PID能够很好地和PWM控制策略结合,防止加入负载初始阶段以及平稳工作时产生较大的转矩脉动,能够很好地减小电流峰值抑制转矩脉动。
2) 对比不同转速下的转矩脉动,模糊自整定PID相对与传统的PWM控制策略在不同转速下都可以使转矩平稳过渡并且很好地抑制转矩脉动。
3) 当转速超过1 200 r/min时,模糊自整定PID控制策略不仅可以使转矩平稳过渡抑制转矩脉动,不会产生过大的转矩波动,防止电机平稳运行后产生不稳定转矩。