考虑转向意图的分布式电驱动汽车横摆稳定性控制
2022-10-11杜云雷王先云韩忠良王淑芬杨建森
杜云雷,王先云,韩忠良,王淑芬,杨建森
(1.大连大学机械工程学院, 辽宁 大连 116622;2.中汽研(天津)汽车工程研究院有限公司, 天津 300300;3.中国汽车技术研究中心有限公司, 天津 300300)
0 引言
近年国家公布了中国智能汽车发展规划,为实现高级别自动驾驶汽车落地,将纯电动汽车作为主要研究对象[1]。其中分布式电驱动汽车拥有轮四轮独立驱、制动和主动前、后轮转向等冗余控制自由度,为车辆操纵稳定性控制提供了更多的可行性。因此,设计完善的控制系统改善车辆操纵稳定性、提高驾驶体验已成为当前学术界的研究热点。
近十几年,车辆稳定性控制领域的研究已取得了长足进展[2]。Shi等[3]提出一种分数阶PID控制器来产生期望的附加横摆力矩,并采用二次规划(QP)方法将附加横摆力矩最优分配给单个车轮。Sun等[4]提出一种考虑电机效率的主动节能直接横摆力矩控制方法,结果表明该控制方法在满足相同转弯需求的同时可有效降低能耗。李胜琴等[5]采用滑膜控制理论及罚函数法设计横摆稳定性控制策略,降低了车辆失稳机率。SAA等[6]提出一种人工神经网络控制器,估计车辆所需的直接横摆力矩,结果表明该控制策略改善了车辆的横向稳定性。Novellis等[7]提出了一种基于前馈和反馈相结合的直接横摆力矩控制器,在静态条件下不断修正车辆的不足转向度,在瞬态过程增大偏航阻尼使车辆保持稳定性。上述文献的研究都取得了一定的控制效果,但没有考虑驾驶员的操作意图,将导致车辆的稳定区域减小。高振海等[8]结合驾驶员的行驶意图设计ESP系统控制工况,提高了车辆的快速响应性能。张琳[9]模拟经验驾驶员的操纵特性采用基于滑膜算法的TV控制,改善了车辆的稳定性。但此控制策略将稳定性因数调节到过度转向和中性转向,使驾驶员感到紧张,同时由于大多数乘用车表现为不足转向,使该策略在车型匹配上也有一定的局限性。
尽管在诸多改善车辆操稳性能的研究中已经注意到了驾驶员因素的重要性,但将转向意图与不足转向度充分结合实现减小驾驶负担、改善操稳性能的研究尚不充分。因此,本文提出一种考虑驾驶员转向意图的横摆稳定性控制策略。该控制策略通过识别驾驶员转向意图来匹配合理的稳定性因数,利用纵向力调节横摆角速度,减轻侧向力的负担,从而能够减小驾驶员的操作负荷,改善车辆操纵稳定性。
1 整车动力学模型
1.1 CarSim整车动力学模型
本文的被控平台车采用CarSim中某C级车辆模型。在此模型基础上,将驱动系统调整为四轮独立驱动形式;并将悬架模型中的非簧载质量增加,以更好符合分布式电动汽车的载荷分布特性。匹配好的整车主要参数如表1所示。其中,在不同垂向载荷Fz下的轮胎模型特性拟合结果如图1所示。
1.2 2DOF模型与CarSim对比验证
为验证二自由度(2DOF)简化模型参数拟合结果,将其与CarSim模型进行仿真对比,方向盘转角为正弦输入,车速90 km/h,得到的仿真结果如图2所示。
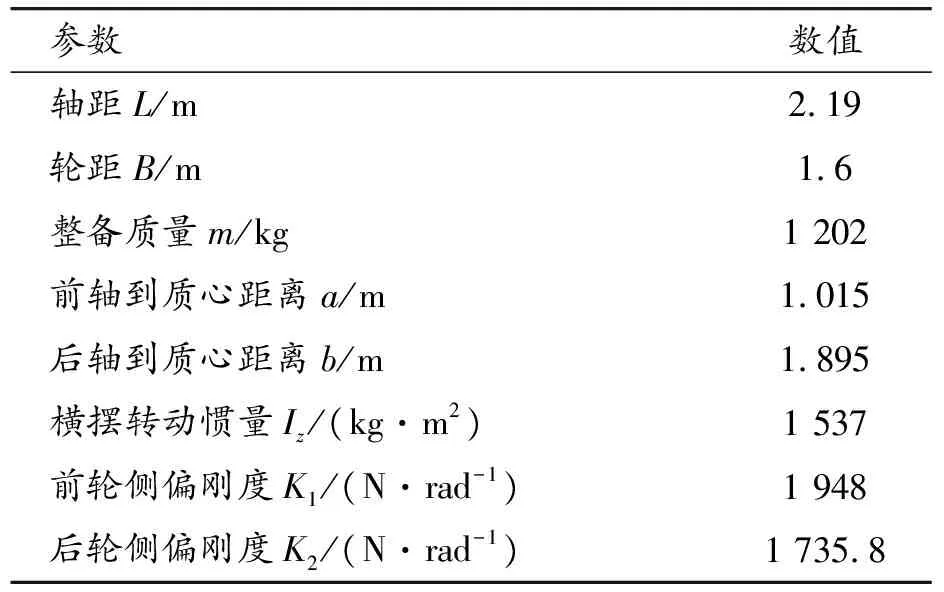
表1 整车主要参数

图1 CarSim轮胎模型特性拟合曲线
由图2可以看出,在上述工况下,经典2DOF模型[9]与CarSim被控车模型误差较小,证明两模型匹配较好。需要说明的是,误差主要由于CarSim模型是高自由度非线性模型与实车更为相近,而经典2DOF模型是简化后的线性模型,故二者的响应时间存在一定差别。
2 含驾驶员转向意图的2DOF
2.1 驾驶员转向意图分析
驾驶员的转向操作是影响车辆稳定性的主要因素[10]。经验驾驶员通过合理配合驱制动关系,可在出入弯道时使车辆保持稳定。在入弯时适当踩制动踏板,使车辆的载荷前移,增大前轮侧向力以产生较大横摆角速度,帮助车辆更好的入弯。出弯时适当踩油门踏板,使车辆的载荷后移,增大后轮侧向力以产生较小的横摆角速度,有利于车辆出弯。本文结合经验驾驶员的操作特性,根据方向盘转角信号识别出转向意图,然后调节稳定性因数Kt来模仿经验驾驶员的操作特性,即在入弯时减小车辆的稳定性因数,在出弯时增大车辆的稳定性因数,从而达到帮助过弯并防止甩尾的效果。


图3 驾驶员的转向意图分析曲线


(1)
其中:K为车辆原有稳定因数;C0与C1为稳态增益系数,影响Kt的幅值;τ0与τ1为时间常数,影响Kt的瞬态响应时间。
2.2 含驾驶员转向意图的2DOF
为完成控制期望模型的建立,将车辆系统简化成线性两轮模型,将悬架刚度和车身刚度产生的影响附加在轮胎刚度中。进而得到线性2自由度车辆动力学模型,如图4所示。

图4 2自由度车辆模型示意图
由图4的与牛顿运动定律可得出2DOF动力学公式(2)[11]。
(2)
其中:
(3)
将式(3)代入式(2)得到微分方程:
(4)
其中:K1为前轮侧偏刚度;K2为后轮侧偏刚度。
将式(4)中的横摆角速度公式拉普拉斯变换后可得:

(5)
其中:
(6)
其中:m为整车质量;vx为车辆纵向速度;β为质心侧偏角;γ为横摆角速度;Fy1为前轮侧向力;Fy2为后轮侧向力;Iz为横摆转动惯量;a为车辆前轴与质心的距离;b为车辆后轴与质心的距离;α1为前轮侧偏角;α2为后轮侧偏角;δf为前轮转角;L为轴距。
将上节式(1)中的Kt替换式(6)G0中的K得到:
(7)
再将式(7)代入式(5)得到含转向意图的横摆角速度传递函数为:

(8)
考虑轮胎力饱和的影响,控制期望应满足如下约束[12]:
(9)
2.3 控制期望验证
为验证含转向意图的2DOF期望模型的准确性,将其和普通2DOF模型对比。采用正弦停滞工况,通过分析对比横摆角速度之间的关系调试稳定因数Kt的参数。最终通过仿真标定出模型参数值为:C0=0.000 1、C1=0.000 2、τ0=τ1=0.005。得到横摆角速度如图5所示。

图5 正弦停滞工况下横摆角速度曲线
当方向盘转角增大时相当于车辆在入弯,当方向盘转角减小时相当于车辆在出弯。由此结合图5可知:与普通2DOF模型相比,含转向意图模型在车辆入弯时会产生更大的横摆角速度,体现车辆稳定性因数减小的趋势;在出弯时会产生较小的横摆角速度,体现稳定性因数增大的趋势;稳态时二者产生的横摆角速度相等。因此含转向意图模型反映了经验驾驶员在出入弯道时的驾驶特性。
3 基于转向意图的TVC策略
本文采用模型预测控制(MPC)来决策附加横摆力矩ΔM,进而对上述控制期望进行跟随,达到减小驾驶员操作负荷和改善车辆稳定性的目的。
3.1 MPC控制器设计
MPC的基本原理包括模型预测未来和实时滚动优化[13]。因此将式(4)中引入直接横摆力矩作为控制输入如下:
(10)
将式(10)表示成状态空间形式可得:
(11)
其中:
将式(11)中的系数矩阵进行离散化处理,转化关系如下:

(12)
其中:τs为采样时间。
将式(11)改为增量式模型。
Δx(k+1)=AΔx(k)+BdΔd(k)+Buu(k)
y(k)=Cx(k)+y(k-1)
(13)
根据MPC的基本原理[14],设定预测时域为p,控制时域为m,且m≤p。由式(13)可得出系统未来p步的预测输出为:
Yp(k+1|k)=SxΔx(k)+Iy(k)+
Sdd(k)+SuΔU(k)
(14)
其中:

由此可得出MPC算法的代价函数如下:
(15)

(16)
由MPC的滚动优化方式可取此时的附加横摆力矩为:
ΔM=ΔMK
(17)
3.2 力矩分配方式
由于上述MPC求得的附加横摆力矩ΔM不能直接作为控制的输入量,所以在满足纵的驱动力不变的前提下,需要对轮胎纵向力Fxi进行合理分配,产生横摆力矩ΔM,具体关系如下:

(18)
其中:Fx为总的纵向驱动力。
为充分利用轮胎力,可将垂向载荷大的车轮分配相对大的纵向力,实现最优分配使车辆的稳定裕度提高。由此可以得到的目标函数如下[15]:
(19)
将式(18)与式(19)转化为二次规划形式其详细推导过程见文献[14]:
(20)
由式(20)可以求出四轮纵向力如下:
(21)
考虑轮胎力的饱和因素,因此纵向力应有如下约束:

(22)
由式(21)可得到力矩分配结果如下:
T=Ru1
(23)
4 仿真验证
基于驾驶员转向意图的TVC策略系统如图6所示,采用CarSim & Simulink联合仿真的方法搭建验证平台,选用双移线和角脉冲工况,分别以含转向意图模型作为控制期望的TVC策略、以普通2DOF模型作为控制期望的TVC策略和不加控制时进行对比仿真测试。在控制输入的权重矩阵Γu中,其质心侧偏角的权重系数设置为零。

图6 基于驾驶员意图的TVC策略系统
由于本文考虑转向意图的期望为横摆角速度,而质心侧偏角不涉及转向意图,故本策略通过跟随期望横摆角速度来提升操控性,同时预防失稳的发生。
4.1 双移线工况
为验证含转向意图的TVC策略在减小驾驶员负荷和改善车辆稳定性方面的有效性,选用双移线工况开展仿真。目标车速vx=90 km/h,路面附着系数μ=0.85,得到的仿真结果如下。
从图7可分析出,当驾驶员通过双移线的过程中,不加控制时,方向盘转角峰值为83°,采用普通2DOF为期望的TVC策略时,方向盘转角峰值为71°,采用含转向意图的TVC策略时,方向盘转角峰值为62°。结合图8可以看出,采用含转向意图的TVC策略时,方向盘转角变化率峰值也为最小。因此可说明:本控制策略通过识别驾驶员的转向意图调节车辆稳定性因数,以入弯减小出弯增大的原则,使驾驶员用较小的方向盘转角就可产生期望的横摆角速度完成过弯。进而实现在极限工况下有效的减轻驾驶员的操作负荷,提升了车辆的操纵性能。
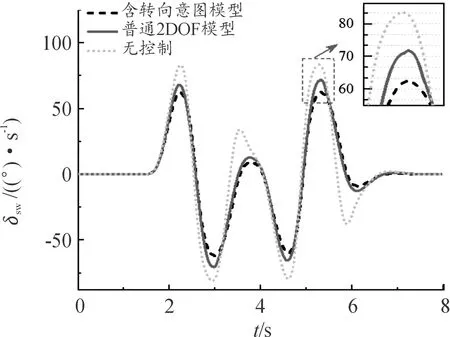
图7 方向盘转角曲线

图8 方向盘转角变化率曲线
从图9可得出,本文提出的基于MPC算法的控制策略,对横摆角速度的跟随性很好,同时从图11可以看出,本控制策略得到的质心侧偏角相轨迹面积最小,表示车辆更趋于稳定。由此说明TVC策略,通过合理的分配驱制动产生的附加横摆力矩可减轻侧向力的负担,从而使车辆在极限工况下有更好的稳定性。

图9 双移线工况下横摆角速度曲线

图10 双移线工况下四轮转矩曲线
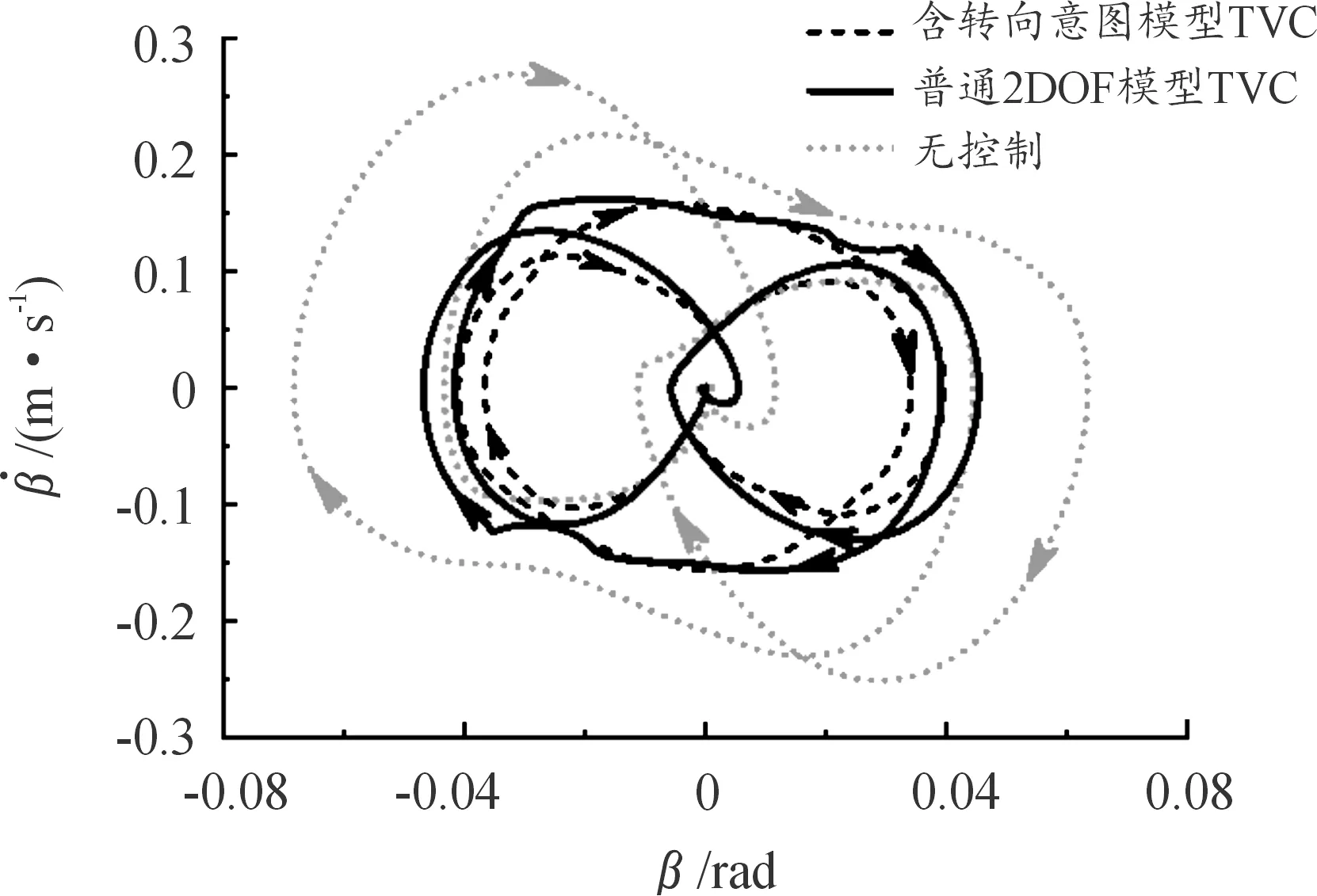
图11 双移线工况下质心侧偏角相轨迹曲线
4.2 角脉冲工况
选用角脉冲工况验证TVC策略的瞬态效果。目标车速vx=90 km/h,路面附着系数μ=0.85,得到的仿真结果如下。
从图12可以看出在瞬态输入情况下,TVC策略对横摆角速度的跟随性很好,产生的横摆角速度最大,且响应更快。结合图13可发现三者的相轨迹差别较小且均处于稳定区域内,由此可说明含转向意图的TVC策略在瞬态情况下表现更好。其原因在于纵向力可帮助侧向力产生一定的横摆角速度,使其瞬态响应更快。
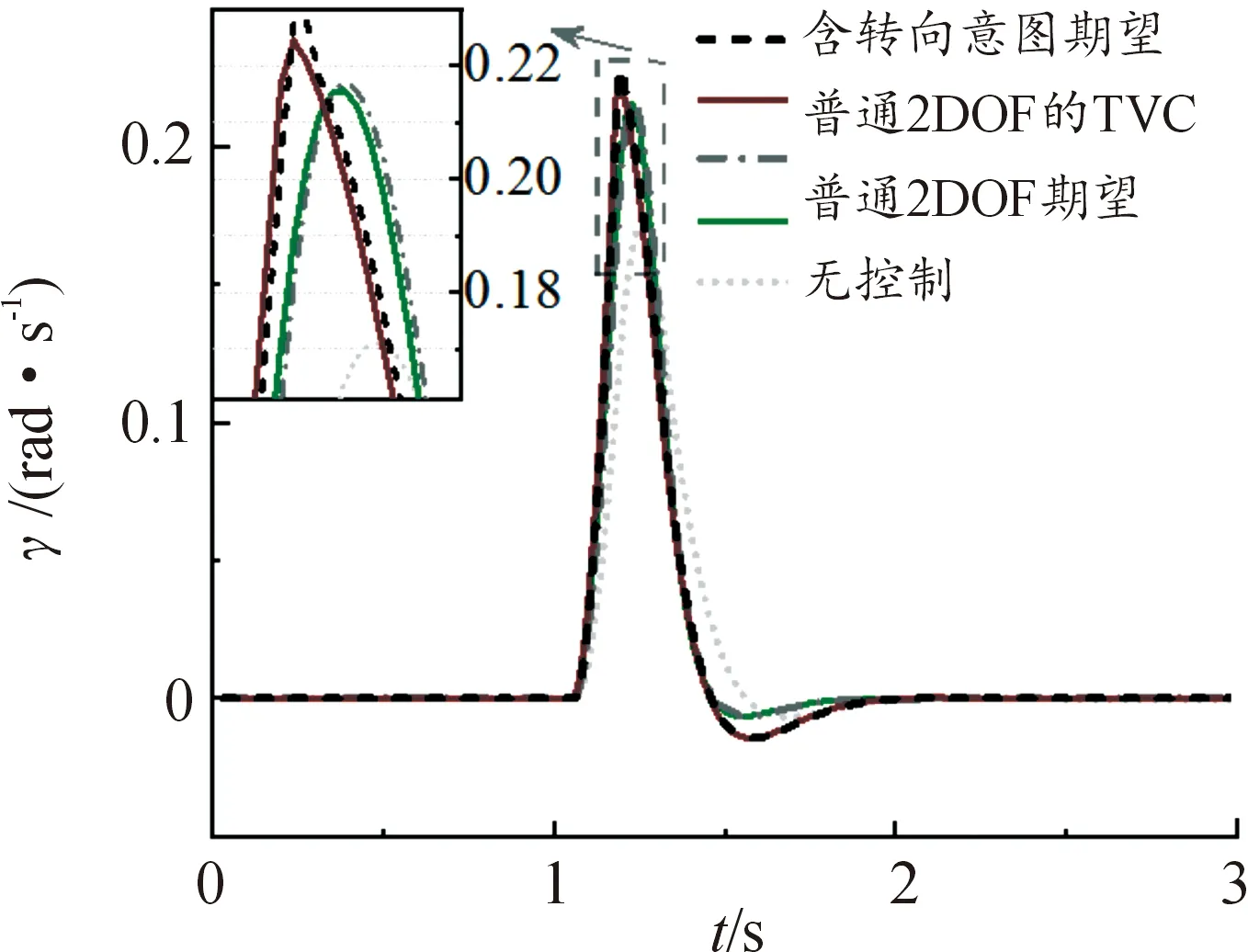
图12 角脉冲工况下横摆角速度曲线
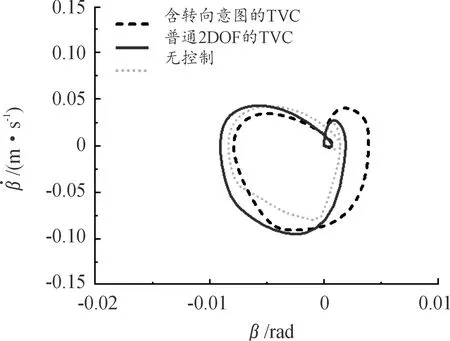
图13 角脉冲工况下质心侧偏角相轨迹曲线

图14 角脉冲工况下附加横摆力矩曲线
5 结论
为改善分布式驱动电动汽车在极限工况下的操纵稳定性,提出基于MPC算法的考虑转向意图TVC策略。首先,在分析经验驾驶员操作特性的基础上,制定了含转向意图的控制期望,当车辆入弯时减小稳定性因数,当车辆出弯时增大稳定性因数。然后,采用MPC方法和QP算法,决策出基于最优分配的四轮转矩作为控制量来保持车辆对期望的跟随。利用纵向力产生横摆角速度的能力来减小侧向力的负担,提高车辆的稳定性。最后,采用CarSim&Simulink联合仿真方法,对所提控制策略进行仿真分析,验证了此控制方法在极限工况下可有效减小驾驶员的操纵负荷,提高车辆的稳定性。