增程式混合动力汽车能量管理策略设计与优化研究
2022-10-11冯仁华孙旺兵赵智超王韶阳陈昆阳
冯仁华,孙旺兵,赵智超,王韶阳,陈昆阳,郭 栋
(1.重庆理工大学 车辆工程学院, 重庆 400054;2.重庆理工大学 汽车零部件先进制造技术教育部重点实验室, 重庆 400054;3.中国汽车工程研究院有限公司, 重庆 401122)
0 引言
随着汽车保有量的迅速攀升,车辆对能源的需求量急剧增加,传统燃油车在行驶过程中会释放大量有害气体,造成了环境污染。据估计,汽车产生的污染物占全球大气污染的42%[1]。为了节约能源和保护环境,新能源汽车在研发和制造多方面得到了政府和企业的大力支持[2-3],并取得了一定的成果。由于目前动力电池技术发展不够成熟,以及车辆充电设施建设不够完善,纯电动汽车相比于传统的燃油车,存在着行驶里程短、生产成本高、充电不便利等问题,无法从根本上满足人们的日常需求[4]。在这种情况下,增程式混合动力汽车应运而生。它拥有发动机和动力电池2个动力装置且能够相互配合工作,能够很好地解决纯电动汽车动力不足、“里程焦虑、空调焦虑”等问题[5]。因此,增程式混合动力汽车逐渐成为企业及高校学者的研究热点。
增程式混合动力汽车设计研发的关键技术是制定合理有效的控制策略。不同的控制策略会影响增程式混合动力汽车的动力性和燃油经济性[6]。为了充分展现增程式混合动力汽车低能耗、低排放等优势,需要对整车控制策略进行详细研究与分析。国内外对增程式混合动力汽车的控制策略研究主要有基于规则型控制策略、全局最优控制策略和智能控制策略[7]。使用全局最优控制策略需要进行大量的运算,在控制系统中,对整车硬件的配置要求比较高,导致成本增加,不利于应用到实际工程中[8]。近年来,智能型控制策略(模糊控制、神经网络等)被广泛应用,但该策略的控制比较复杂,而且需要富足的先验知识,因此,在实车上应用存在很大的难度[9]。当前市面上所生产的增程式车型中应用较为广泛的是基于规则型的整车能量控制策略,该策略通常可以分为恒温器型控制策略[10]、功率跟随控制策略[11]和定点控制策略等[12]。应用恒温器型控制策略时,发动机的启停由动力电池荷电状态(SOC)的阈值所决定。该控制策略下,动力电池会不停地充放电,导致动力电池形成不可逆转的损伤,寿命大打折扣[13]。国内外关于增程式混合动力汽车整车控制策略的制定与研究,使用较多的是功率跟随和定点控制这2种策略。刘汉武等[13]针对增程式电动汽车多点控制策略优化问题,提出了一种基于多目标参数优化结果的增程器能量管理控制策略,分析了不同控制策略对辅助动力装置(APU)输出功率、电池电流及SOC的影响。邓智辉等[14]提出了双电量消耗模式-电量保持模式(CD-CS)多工作点控制策略,在不同行驶工况下分别对双CD-CS多工作点控制策略、恒温器控制策略、混合多工作点控制策略进行仿真验证。然而,功率跟随和定点控制这2种控制策略在同一台车上,对其整车性能、油耗和主要部件影响特性进行较为全面的研究较少。据此,基于数据库和部分零部件试验结果,建立了某增程式混合动力汽车仿真分析模型,并设计了功率跟随和定点控制2种能量管理控制策略,对功率跟随中的充电功率系数、定点控制中的发动机输出功率值进行了优化,然后对比分析了该增程式混合动力汽车2种策略下在世界轻型汽车测试循环(WLTC)工况下燃油经济性的特性,并研究了2种控制策略下发动机工况及效能、电池SOC、电池输出功率、发电机工作点及效能等特性,为该增程式混合动力汽车的后续研究和进一步优化提供了一定的参考。
1 仿真模型建立
1.1 整车基本参数
本研究中的增程式混合动力汽车由一台直列四缸、1.5 L自然吸气发动机,峰值功率为150 kW的驱动电机和容量为50 Ah的动力电池组成,整车性能指标及相关部件的基本参数如表1所示。

表1 增程式混合动力汽车整车性能指标及相关部件的基本参数
1.2 整车仿真模型建立
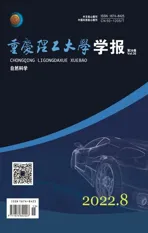
为研究该增程式混合动力汽车控制策略的可行性和零部件参数选择的合理性,本研究基于GT-SUITE软件建立了该增程式混合动力汽车整车仿真模型,如图1所示。仿真模型主要包括:驾驶员模型、整车动力学模型、再生制动系统模型、整车及动力系统控制策略模型、增程器模型、动力电池模型及电驱系统模型等。
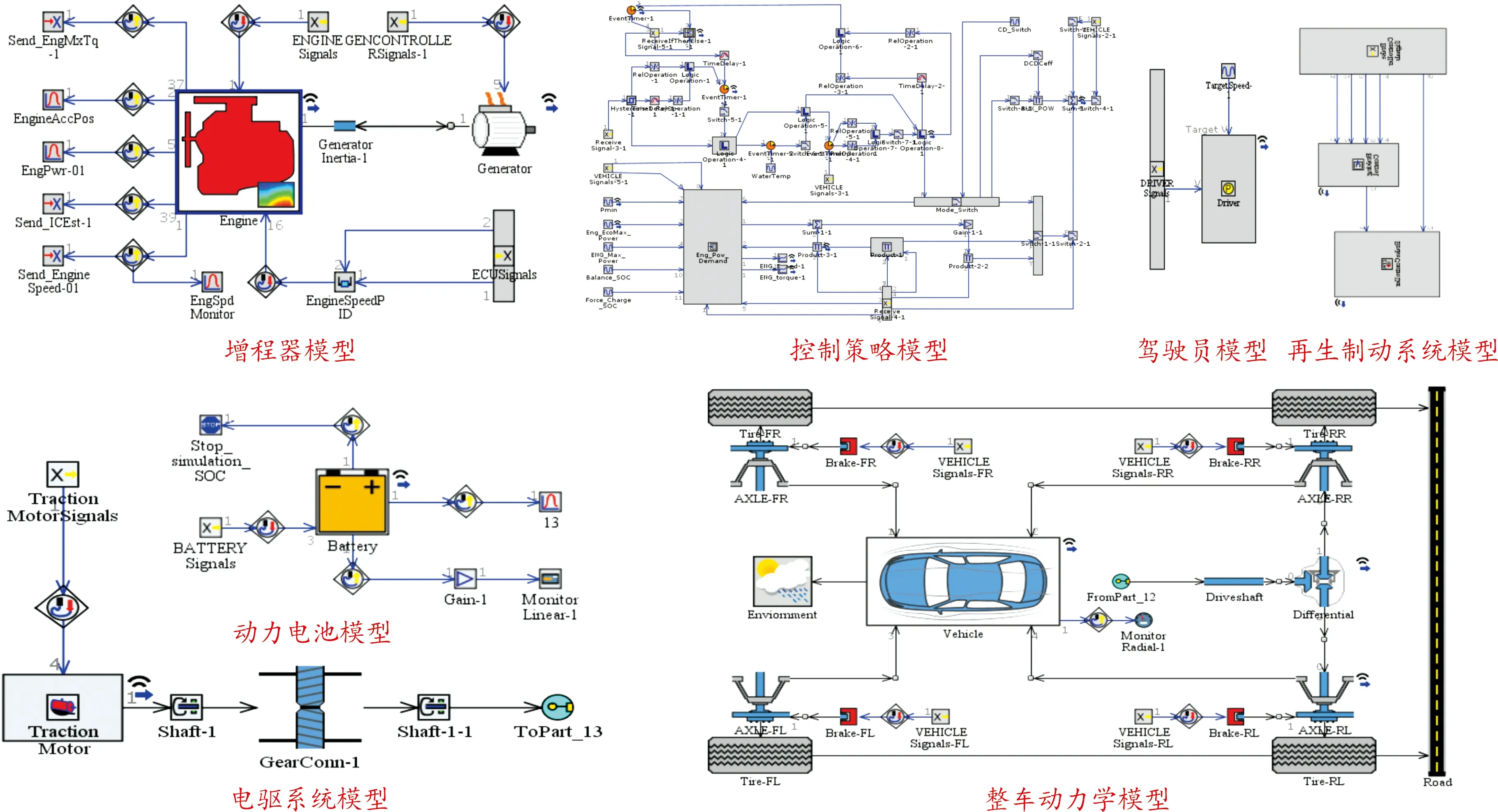
图1 增程式混合动力汽车整车仿真模型
1.3 主要参数输入
仿真模型中,需输入各部件或系统准确的尺寸、性能等数据,以保证模型的准确性[15]。图2为驱动电机效率MAP、图3为发电机效率MAP、图4为发动机万有特性曲线。此外,汽车行驶工况的选择能直接反映出车辆的整体性能。与NEDC行驶工况相比,WLTC工况更接近真实道路的行驶条件,无论是传统的燃油车还是电动车,都更接近于真实道路上行驶时的燃油消耗和续航里程[16]。因此,本次仿真采用WLTC作为循环工况的输入,如图5所示。

图2 驱动电机效率MAP

图3 发电机效率MAP
1.4 纯电模式下整车性能仿真
为了验证驱动电机、动力电池等主要动力部件的参数是否满足整车性能要求,以及搭建的模型是否可靠。可以通过纯电模式下整车的动力性能指标进行验证。
图6为纯电模式下整车加速性能仿真结果。由图6可知,在纯电模式下,车辆百公里加速时间为8.3 s,车辆可达到的最高车速为205 km/h。仿真结果符合车辆最高车速大于185 km/h、百公里加速时间小于9 s的动力性设计指标,说明电驱系统,动力电池、整备质量、滚阻系数等设计参数选择合理,所搭建的模型具有较高的研究价值。
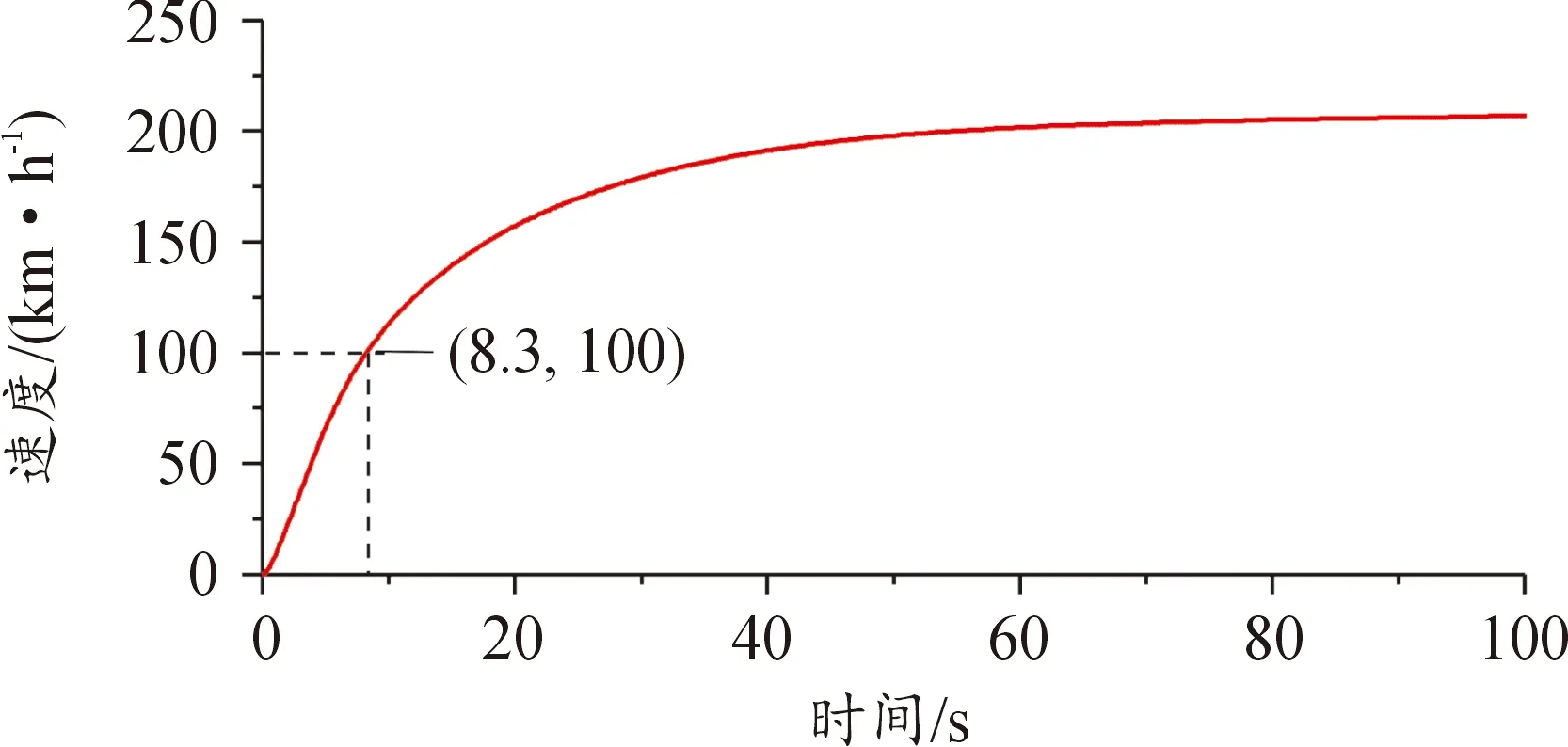
图6 纯电模式下整车加速性能仿真曲线
图7为纯电模式下电池SOC与行驶里程曲线。由图7可知,在纯电模式下,电池SOC值从95%下降到5%时,车辆在WLTC工况下行驶的里程数为96.05 km,满足其相应行驶里程数大于90 km的设计要求,相关部件的参数选择合理。
2 增程模式下整车控制策略制定
本研究从改善整车燃油经济性的角度出发,在增程模式下,制定了发动机定点控制策略和功率跟随控制策略,并利用仿真模型对比研究了2种控制策略下的整车油耗、发动机工况、电池SOC和功率等特性。
2.1 模式划分策略
在整车控制策略中,根据加速踏板开度及当前电池SOC值,并结合发动机单次启动时间t0及发动机水温T判断模式切换。当动力电池SOC小于所设定阈值下限时,整车以增程驱动模式运行;当动力电池SOC介于所设定阈值上下限之间时,整车根据上一时刻的状态进行模式切换;当动力电池SOC高于所设定阈值上限时,整车根据上一时刻状态、发动机单次启动时间及发动机水温进行模式切换。控制逻辑如图8所示。
图8 模式划分策略控制逻辑框图
SOCH和SOCL分别为电池SOC阈值上、下限。
2.2 功率跟随控制策略
功率跟随控制策略中,发动机根据动力电池的SOC值和驱动电机需求功率调整发动机工作点,从而输出整车所需用的功率[17]。当电池SOC值大于所设定阈值的上限,并且驱动电机需求功率小于所设定的功率最小值时,发动机关闭;其余工作条件下,发动机开启,车辆进入增程驱动模式,发动机根据驱动电机发出的功率需求信号输出所对应的功率。这种控制策略可以优化动力电池的工作区间,但是由于发动机频繁地切换转速,会对车辆的NVH等性能产生不良影响,在设计中要考虑车辆的舒适性[18]。
在增程驱动模式下使用功率跟随控制策略时,为了保证动力电池SOC处于平衡状态,则要根据SOC附加某一功率值,该附加功率为:
(1)
式中:Kcha为充电功率系数。
根据动力母线上的整车需求功率PT、发电机效率ηgen以及附加功率Padd计算得到发动机需求功率为:
(2)
由式(2)可知,增程式混合动力汽车采用功率跟随控制策略时,发动机功率将在一个较大的范围内变化,为了提高发动机工作效率,发动机工作点须沿着最优工作曲线移动[19]。
2.3 定点控制策略
在定点控制策略下,将整车需求功率划分在几个不同的区域,每个区域设定了相对应的发动机工作转速及输出功率。当有功率需求时,根据驱动电机需求功率所在的范围,发动机输出恒定的功率提供给整车。当发动机输出功率大于驱动电机需求功率时,多余的能量储存到动力电池中,从而为动力电池补充电量。这种策略控制方法比较简单且易于实现,发动机能够工作在高效率区,且功率变化小,发动机效率比较高,电池SOC可以保持在平衡位置。因而,可以有效地延长动力电池的寿命、降低汽车的燃油消耗量[20]。
采用定点控制策略,则需要在发动机工作点需求基础上,对发动机工作点再次调节,进而转移至发动机所选定工作点。对于定点控制策略,发动机工作点的选择会直接影响其输出功率,工作点越多,多余的功率输出会越少。但是过于繁多的工作点会使控制变得比较复杂,并且发动机工作点频繁地切换会对车辆燃油经济性产生不良后果[21]。在一般情况下,汽车爬陡坡或急加速的时间比较短。因此,动力电池可以短时间提供汽车因爬陡坡或急加速所需要的高功率。综合考虑,在本文研究中选取5个工作点对发动机进行控制。
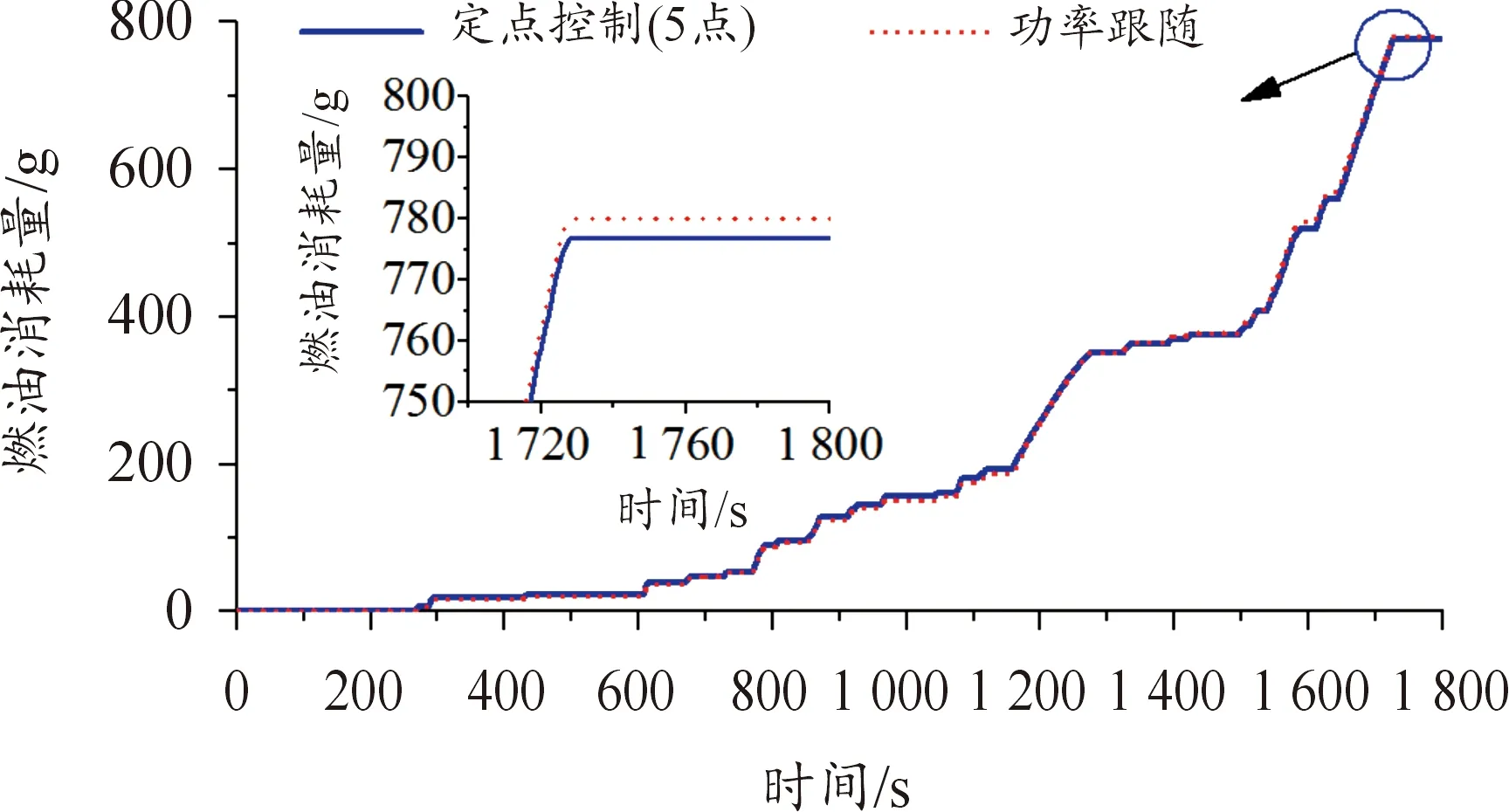
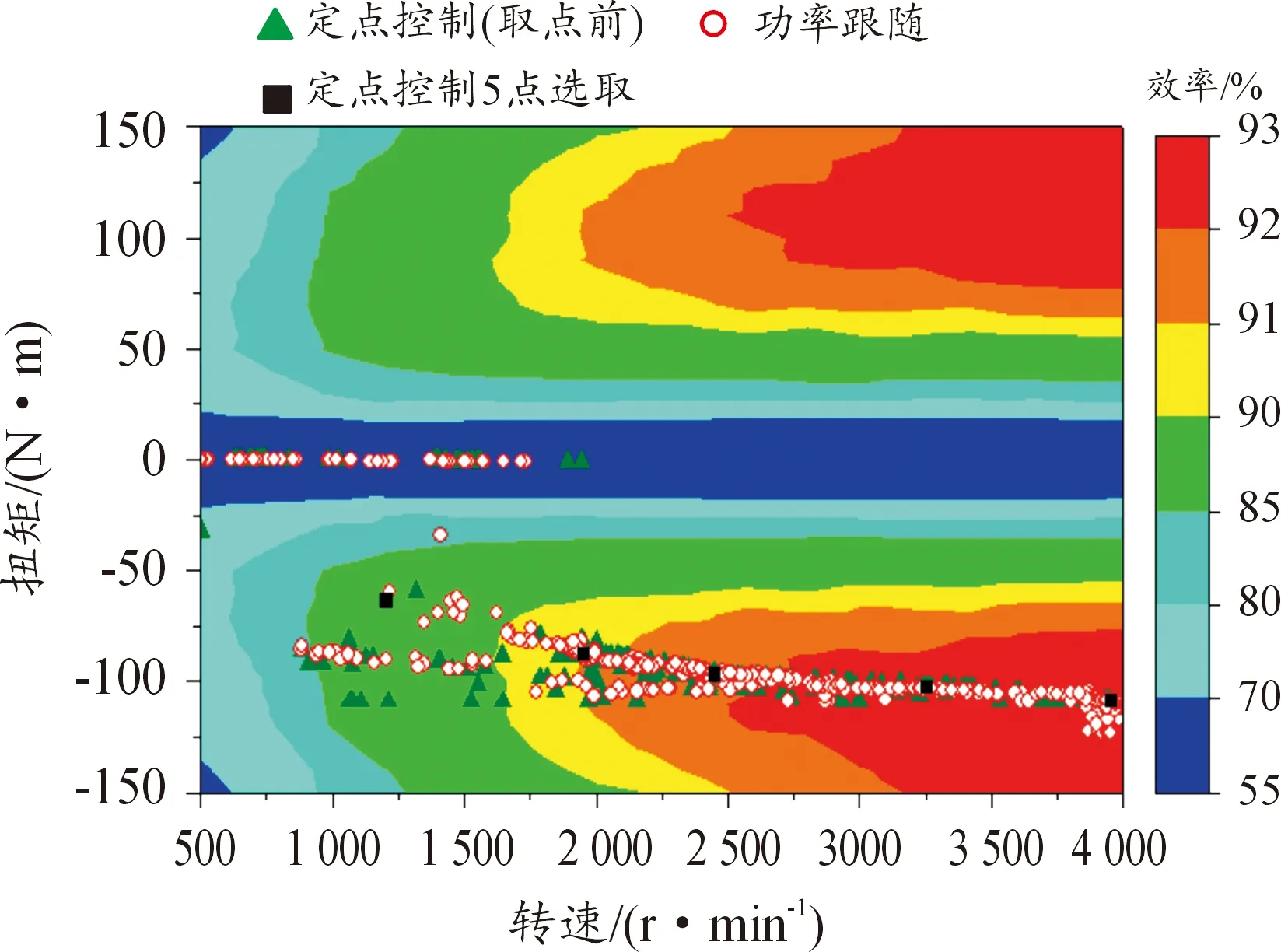
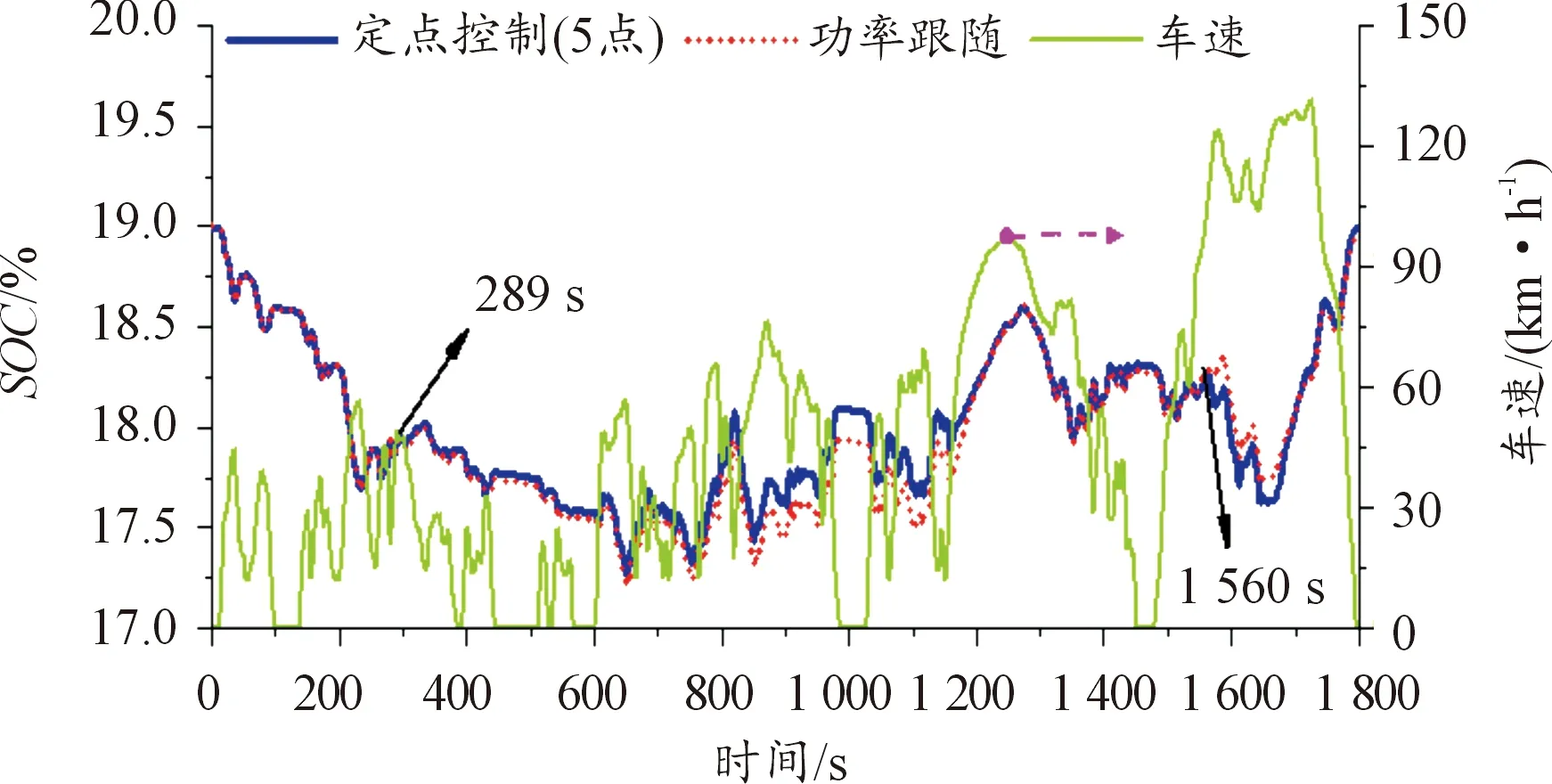
当驱动电机需求功率Preq 图9 定点控制策略控制逻辑框图 本文所制定的2种控制策略的区别是:功率跟随控制策略发动机根据驱动电机的需求功率实时的输出所对应的功率;定点控制策略是发动机根据驱动电机的需求功率,判断该功率所在的区间,从而输出恒定的功率。制定2种策略的目的是分析在WLTC工况时,电量保持模式(charge-sustaining,CS)下不同控制策略的策略响应,以及不同的控制策略对整车燃油经济性及主要零部件的影响特性。 考虑到要为电量消耗模式(charge-depleting,CD)下SOC的阈值下限做预留处理,保证续航;另外为了避免因过度放电对电池造成损伤,将动力电池SOC初始值设置为19%,当动力电池SOC低于SOC阈值下限或者需求功率大于电池额定放电功率时,系统进入电量保持模式(charge-sustaining,CS)。 增程式混合动力汽车的优势在于能有效减少燃油消耗量,从而可以提高燃油经济性。所以整车的燃油经济性是评价该车是否具有良好性能的重要指标之一[22]。 在WLTC工况下,车辆燃油消耗的体积和百公里燃油消耗量用以下公式计算: Vfuel=m/ρ (3) 式中:Vfuel为燃油体积(L);m为燃油消耗量(kg);ρ为燃油密度(kg/L)。 (4) 式中:V为百公里燃油消耗量(L);S为行驶距离(km)。 本研究中对控制策略参数的优化的策略是在保证电池终止SOC接近平衡值的情况下,降低整车燃油经济性。 发动机采用功率跟随策略时,式(1)中的充电功率系数对整车油耗和电池SOC有一定的影响。因此,为了降低整车的油耗以及电池终止SOC能够达到平衡值,则需要对充电功率系数进行优化分析。图10为充电功率系数对整车油耗和电池SOC的影响特性曲线。由图10可知,电池终止SOC和油耗均随着充电功率系数的增加而增加,在充电功率系数为0.085时,电池终止SOC达到平衡值19%,此时整车百公里油耗较低,具体为5.01 L。 图10 充电功率系数对整车油耗和电池SOC的影响特性曲线 定点控制(5点)策略下,发动机输出功率的选择也会影响动力电池SOC和整车燃油经济性,在本次研究中,分别研究了5组不同的发动机输出功率对动力电池SOC和整车油耗的影响,如表2所示。 表2 发动机输出功率对电池SOC和整车油耗仿真结果 由表2可知,采用第5组发动机输出功率(Ppoints1~Ppoints5为8-18-25-35-45 kW)时的整车油耗最低、电池终止SOC最接近平衡值19%。 经过上述参数优化后的2种策略下整车燃油消耗量随时间变化特性如图11所示。由图11可知,2种控制策略在WLTC工况下的燃油消耗量变化趋势基本相同。定点控制(5点)和功率跟随控制策略下燃油消耗量分别为776.9 g和780.1 g,通过式(3)和式(4),计算出定点控制(5点)和功率跟随策略WLTC工况下百公里燃油消耗量分别为4.97 L和5.01 L。 图11 整车燃油消耗量随时间变化特性曲线 发动机作为增程式混合动力汽车的辅助动力单元,其工作特性直接影响整车性能。定点控制和功率跟随2种控制策略下的发动机输出功率变化、工作点分布分别如图12和图13所示。由图12可知,在2种控制策略下,发动机输出功率相差不大,在一个完整的WLTC工况下,定点控制(5点)策略发动机平均输出功率为7.25 kW,功率跟随控制策略发动机平均输出功率为7.35 kW。由图13可知,发动机OL线即为发动机最优工作曲线。功率跟随策略发动机工作点沿着发动机最优工作曲线移动,但是并非所有的点都会沿着发动机最优工作曲线移动,有部分工作点变化范围较大,可能会导致发动机效率降低。定点控制策略中,发动机工作点则不完全需要在最优工作曲线上移动,采用定点控制策略,则在发动机工作点需求基础上,根据需求工作点的聚集程度进行选取,进而调整至发动机最优工作曲线,最后所选取的5个点均位于发动机最优工作线上,该策略能够保证发动机工作在高效率区,从而降低油耗,提高整车燃油经济性。定点控制(取点前)、定点控制(5点选取)和功率跟随策略下的发动机热效率分别为39.19%、39.42%和39.10%。 图12 发动机输出功率变化 图13 发动机的工作点分布 发电机工作点分布如图14所示。由图14可知,定点控制和功率跟随策略下发电机工作点的分布整体上差别不大,功率跟随策略下的发电机工作点相对集中。总体上,定点控制(取点前)、定点控制(5点选取)和功率跟随策略下的发电机效率分别为91.71%、91.82%和91.70%。 图14 发电机工作点分布示意图 电池SOC和功率变化曲线分别如图15、图16所示。由图15和图16可知,在低速区,车辆主要是以电池作为动力源为其提供动力,发动机参与度较少,2种策略的电池SOC变化趋势一致。 图15 电池SOC变化曲线 图16 电池功率变化曲线 从289 s开始,定点控制(5点)策略电池SOC高于功率跟随策略,主要原因是定点控制(5点)策略下的电池充电功率高于功率跟随控制策略,说明定点控制(5点)策略在满足车辆行驶所需的能量外,有多余的能量储存到动力电池中,从而导致电池SOC升高;在中速以及高速区,定点控制(5点)策略的电池SOC值高于功率跟随策略,主要是因为定点控制(5点)策略在能满足驱动电机需求功率的前提下,有多余的电能储存到动力电池中,导致SOC升高;在超高速区,从1 560 s时刻开始,定点控制(5点)策略电池SOC低于功率跟随控制策略,原因可能是车辆处于急加速或者爬坡工况,驱动电机需求功率大于发动机输出功率,此时发动机和动力电池协同工作,导致动力电池放电功率增大(见图16),从而使电池SOC降低。在WLTC工况终止时,定点控制(5点)和功率跟随策略下电池SOC值分别为18.99%和19%。 本文以某增程式混合动力汽车为研究对象,基于数据库和部分零部件试验结果,利用GT-SUITE软件建立了增程式混合动力汽车仿真模型。从改善整车燃油经济性的角度出发,制定了发动机定点控制(5点)策略和功率跟随的能量管理控制策略,对功率跟随中的充电功率系数、定点控制中的发动机输出功率值进行了优化,然后对比分析了这2种策略下增程式混合动力汽车在WLTC工况下燃油经济性的特性,并分析研究了2种控制策略下发动机工况及效能、电池SOC、电池输出功率、发电机工作点及效能等特性,主要结论如下: 1) 通过优化,功率跟随策略中的充电功率系数为0.085时,电池终止SOC达到平衡值19%,整车百公里油耗为5.01 L。定点控制(5点)策略中采用发动机输出功率(Ppoint1~Ppoint5为8-18-25-35-45 kW)时的电池终止SOC为18.99%,整车百公里油耗为4.97 L。定点控制(5点)策略下整车百公里油耗满足低于5.0 L的设计指标要求。 2) 采用定点控制(5点)策略使发动机能在最优工作线上工作,从而保证发动机工作在高效率区,提高了整车燃油经济性。定点控制(5点)和功率跟随策略下,发动机热效率分别为39.42%和39.1%。 3) 定点控制(5点)和功率跟随策略下发电机效率分别为91.82%和91.7%。
3 控制策略参数优化
3.1 功率跟随策略充电功率系数优化

3.2 定点控制策略发动机输出功率优化

4 控制策略对主要部件影响特性分析
4.1 发动机工作点对比分析


4.2 发电机工作点对比分析
4.3 电池SOC和功率对比分析

5 结论