基于加速鱼群算法的锂离子电池剩余寿命预测
2022-03-16丁有军宋丽君殷春武
何 星,丁有军,宋丽君,殷春武
(1.西安建筑科技大学 信息与控制工程学院, 西安 710055; 2.国防科技大学 装备综合保障技术重点实验室, 长沙 410073)
1 引言
锂离子电池具有高能量密度、低自放电率、长寿命、无记忆效应以及宽温度范围等优点,已经成为新能源电动汽车、航空航天以及国防军事等领域中非常重要的储能装置。国际信息咨询公司IHS 预计,到2025年全球储能装置中锂电池将会占据超过80%,我国已将高安全性、低成本、长寿命锂电池列为《中国制造2025》与《能源技术革命创新行动计划(2016—2030年)》规划中的重点研究发展领域,将其视为解决交通能源危机与环境保护问题的良药。与此同时,在循环使用过程中,因外部环境和内部电极材料腐蚀、隔膜老化等原因,会引起锂离子电池性能逐渐退化和失效,可靠性、安全性和寿命已成为制约其成功应用的至关重要问题。近年来,锂离子电池寿命预测和健康管理已成为预防锂离子电池失效性事故,确保设备运行安全的关键技术。
在锂离子电池剩余寿命预测方法中,基于模型的方法旨在通过分析锂离子电池内部电化学反应的本质机理,建立描述其退化行为的数学模型,再外推实现电池剩余寿命预测。物理模型能够获得较高的预测精度,但涉及过多的参数使得精确建模十分困难。此外,固体电解质膜、电化学阻抗谱等电化学特性参数测量困难,也使得基于物理模型的方法目前在工业应用上难以突破。基于数据驱动的方法无需考虑锂离子电池内部退化机理,只需要通过状态监测技术获取锂离子电池蕴含退化信息的历史数据,再利用统计回归或机器学习等方法构造退化模型来实现剩余寿命预测。人工神经网络、支持向量机(SVM)和相关向量机(RVM)等方法已被用于锂离子电池剩余寿命预测。但神经网络方法存在计算复杂度大,易陷入局部最优解,动态更新能力差等问题;而SVM和RVM最优核参数的确定是需要解决的难题。
极端学习机是2006年由Huang等提出的一种新型单隐层前馈神经网络(SLFNs),已成功应用于回归和分类领域。但是在使用过程中,由于隐层权值和偏差随机生成会造成一定概率的复共线性问题,造成ELM预测性能存在不确定性,从而影响ELM的泛化性能。
针对上述问题,为提高极端学习机预测锂离子电池剩余寿命的可靠性,本文提出采用人工鱼群算法对ELM网络参数进行优化,并针对基本鱼群算法收敛速度慢、易陷入局部最优的问题提出改进方案,实现最优ELM隐含层网络参数的提取,建立锂离子电池剩余寿命预测模型,最后通过NASA Ames研究中心的公开数据集对模型性能进行验证。
极端学习机相比传统的BP神经网络、RBF神经网络,将参数训练的迭代调整过程转化为求解线性方程组,解析求得具有最小范数的最小二乘解作为网络权值,整个训练过程可一次完成无需迭代,这使得ELM的训练速度获得了显著提升。ELM的回归原理可归纳为


(1)
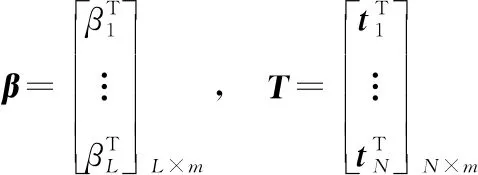
其中=[1,2,…,]是连接第个隐层神经元和输入神经元的权向量,=[1,2,…,]是连接第个隐层神经元和输出神经元权值向量,是第个隐层神经元偏差。

(2)
上式个方程可以简写为
=
(3)
其中
(,…,,,…,,,…,)=
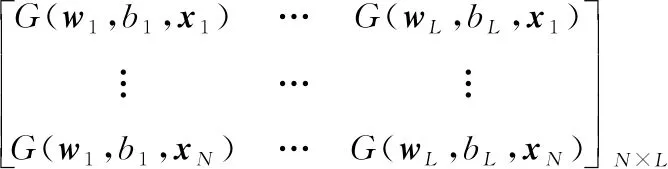
其中:称为神经网络的隐层输出矩阵;的第列表示第个隐层节点关于,,…,的输出矩阵。

=
(4)
式(4)中=[,…,],是矩阵的Moore-Penrose广义逆。
综上,给定一个训练样本集给定训练集,激活函数(),隐层节点数目为。ELM学习算法步骤为:
Step 1:随机指定输入权值和隐层偏差,=1,…,;
Step 2:计算隐层输出矩阵;
Step 3:计算输出权值。
针对可能因ELM隐层输出矩阵出现病态导致伪逆计算结果错误,本文借鉴岭回归的思想,将式(4)输出权值的求解替换为式(5)所示形式:

(5)
其中为正则化参数。
3 人工鱼群算法及改进
3.1 基本人工鱼群算法
人工鱼群算法(AFSA)是基于自然界中鱼群觅食行为提出的一种智能优化方法。其核心算法主要包括3种行为:觅食、聚群和追尾。在实际应用中,将每条人工鱼视为问题的一个可行解,通过适应度函数评估每个解的优劣。具体寻优过程如下:
设人工鱼初始规模为,每条鱼的位置表示为=[,,…,]。食物浓度函数,即适应度函数定义为=(),=1,2,…,,任意两条鱼和之间的距离为=‖-‖,其中‖·‖为欧几里得范数。在每个迭代过程中,人工鱼通过觅食、聚集和追尾行为进行位置更新。
1) 觅食行为。假设一条人工鱼当前位置为,对应的适应度值为=()。在该人工鱼感知范围内随机选择另一位置,若对应的适应度函数值满足>,那么人工鱼就按照式(6)朝移动一步。否则,人工鱼在感知范围内再随机选择其他位置重新判断是否满足条件,若尝试次仍不满足前进要求,此时人工鱼就根据式(7)随机选择一个移动位置。

(6)
=+×
(7)
其中为[0,1]区间的随机数,为移动步长。
2) 聚群行为。假设在以为中心的感知范围内共有条鱼。如果≥1,那么根据式(8)计算得到当前感知范围内中心位置。此时如果满足>(为拥挤度因子)且>,就说明中心位置更优且周围不拥挤,那么就根据式(9)计算下一位置。否则,执行觅食行为。
(8)

(9)
3) 追尾行为。假设在当前感知范围内找到的具有最大适应度值的人工鱼位置为,对应的适应度值为。如果满足>且>,说明位置更优且位置周围不拥挤,那么人工鱼根据式(10)朝着移动一步。否则,执行觅食行为。

(10)
3.2 加速鱼群算法
基本鱼群算法在寻优过程中存在如下的问题:一是在整个进化过程中采用固定的感知范围和移动步长不利于前期快速全局寻优和后期精确局部定位;二是在觅食过程中,达到设定的最大尝试次数,仍然不满足移动条件,就在感知范围内随机移动一步,这无法保证移动后的位置优于当前位置,且易造成陷入局部最优。
针对上述问题,本文提出相应的改进方案:一是将感知范围和移动步长由固定值改为动态值,随着进化代数自适应调整,以保证前期快速收敛和后期精确寻优。改进后的和移动步长根据式(11)和(12)确定。

(11)

(12)
其中:、,、分别为感知范围和移动步长的上、下限,为当前代数,为最大代数。
二是在觅食过程中,当达到最大尝试次数仍无法满足移动条件时,给随机移动增加一个混沌扰动,以增加种群多样性并提高跳出局部最优的能力。改进后的随机移动位置根据式(13)确定。
=+×sin(2)×
(13)
通过上述改进,可实现在加快鱼群收敛速度的同时提高收敛精度。
4 加速鱼群算法优化极端学习机的预测建模过程
基于上述改进思路,利用AAFSA-ELM进行预测建模的流程如图1所示。
具体建模步骤归纳如下:
Step 1:初始化人工鱼群参数,主要包括种群规模,感知范围上、下限,移动步长上、下限,迭代次数,尝试次数等;
Step 2:利用Tent混沌映射函数生成2倍指定规模的种群,基于训练样本和适应度函数初筛出适应度值较大的前个作为初始种群;
Step 3:鱼群执行觅食、聚群和追尾行为,执行过程中人工鱼感知范围和移动步长按照式(11)和式(12)自适应确定,当人工鱼不满足移动条件时,按照式(13)进行增加混沌扰动的随机移动;
Step 4:判断是否达到最大迭代次数,若未达到,返回Step 3,否则,转向Step 5;
Step 5:输出最优隐层参数和,送入ELM构建预测模型;
Step 6:利用测试样本对预测模型性能进行验证,输出锂离子电池剩余寿命预测结果。
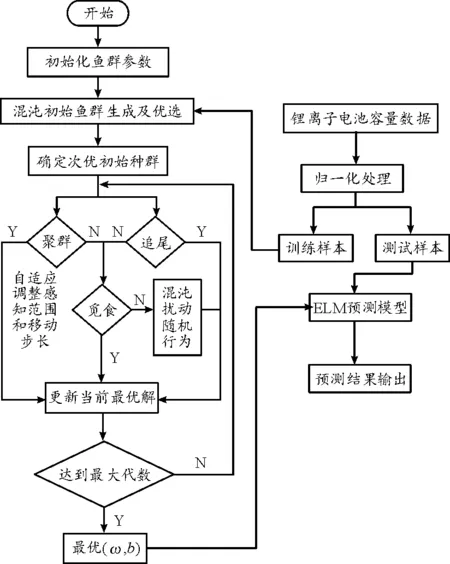
图1 AAFSA-ELM预测建模流程框图
5 实验验证
选择NASA Ames研究中心的公开数据集。用于老化测试的锂离子电池为标称容量为2 Ah的18650型锂离子电池,数据集共包含标号分别为B0005、B0006、B0007、B0018的四块电池,分别记为B5、B6、B7、B18。4块电池在24 ℃的室温条件下,先以1.5 A的恒流电流进行充电,直到电池电压达到4.2 V后转为恒压模式继续充电,待充电电流下降至20mA以下停止充电。随后,以2 A恒流方式对电池进行放电,直到四块电池电压分别降至2.7 V、2.5 V、2.2 V、2.5 V,至此完成一个充放电循环周期,重复上述循环过程直至电池寿命终止。通过剔除异常值后分别提取得到B5、B6、B7、和B18四块电池循环过程168个、168个、168个和132个电池容量数据。
仿真实验中,分别利用未经优化的ELM和AAFSA-ELM建立预测模型。为检验预测模型泛化性能,分别选择四块电池容量数据的40%和50%作为训练样本进行网络训练,剩余样本作为测试样本验证预测模型性能。仿真过程中各参数设置如表1所示。
预测过程中,B5、B6、和B18三块电池寿命失效阈值设为当电池容量下降至标称容量的70%, B7设置为下降至标称容量的72%。分别利用ELM和本文提出的AAFSA-ELM建立预测模型,并与文献[18]中的ALO-SVR方法进行比较,预测结果如表2所示。

表1 参数设置
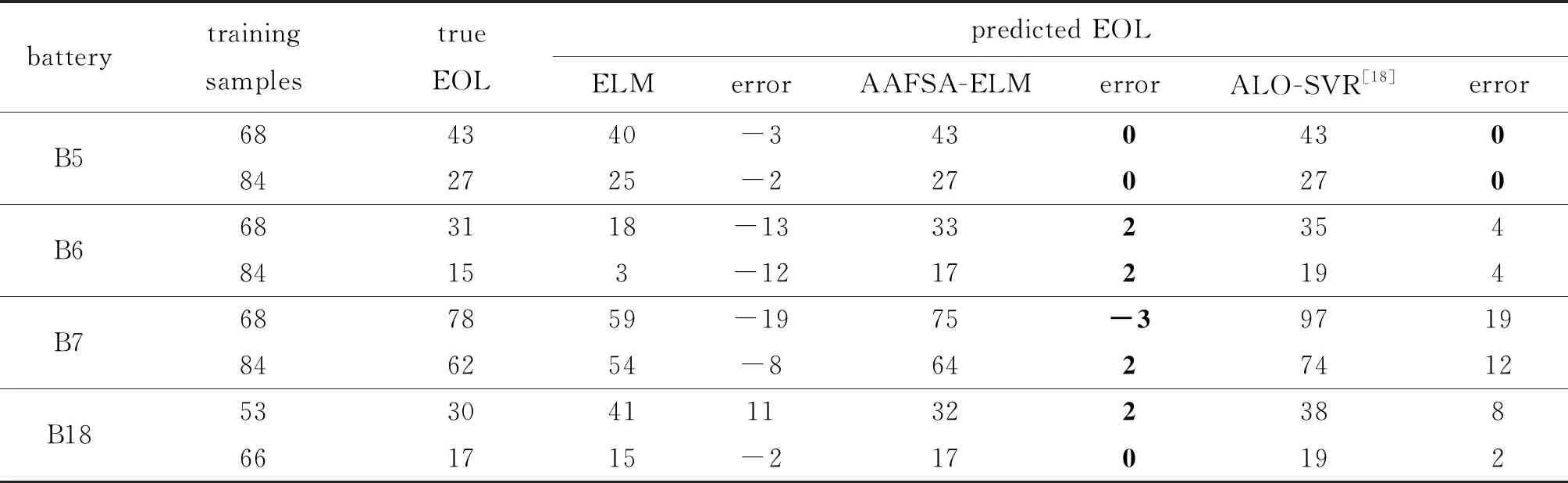
表2 ELM和AAFSA-ELM剩余寿命预测结果
从表2可以看出,AAFSA-ELM预测结果误差最小,最大预测误差为3,而ALO-SVR和ELM最大误差为19,但ELM因复共线性问题使得其难以提供稳定精确的预测结果,AAFSA-ELM方法预测结果明显优于ELM和ALO-SVR。
图2~图9为采用ELM和AAFSA-ELM分别利用总样本的40%和50%进行训练,其余作为测试样本的预测结果曲线。
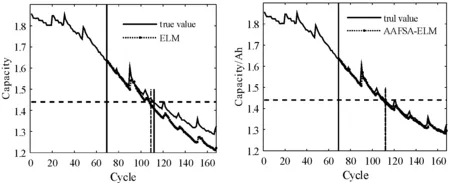
图2 B5电池40%总样本训练时预测结果曲线
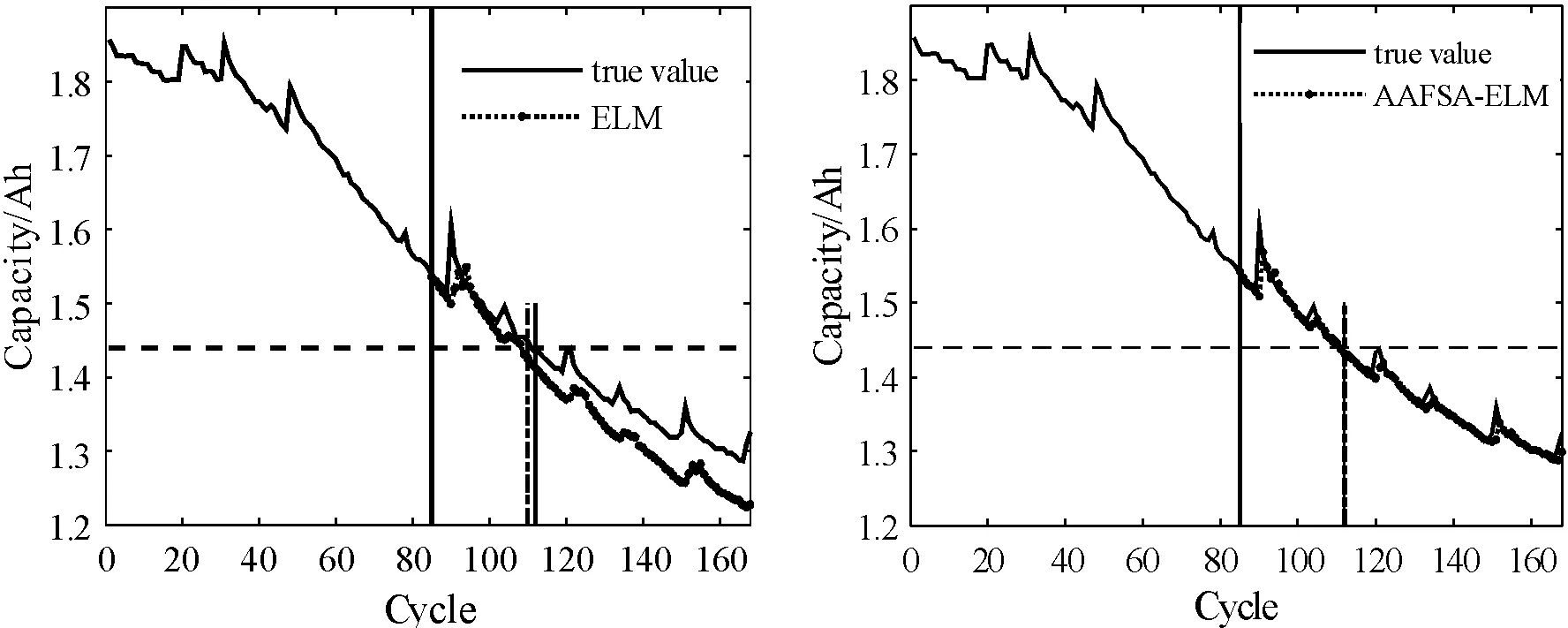
图3 B5电池50%总样本训练时预测结果曲线
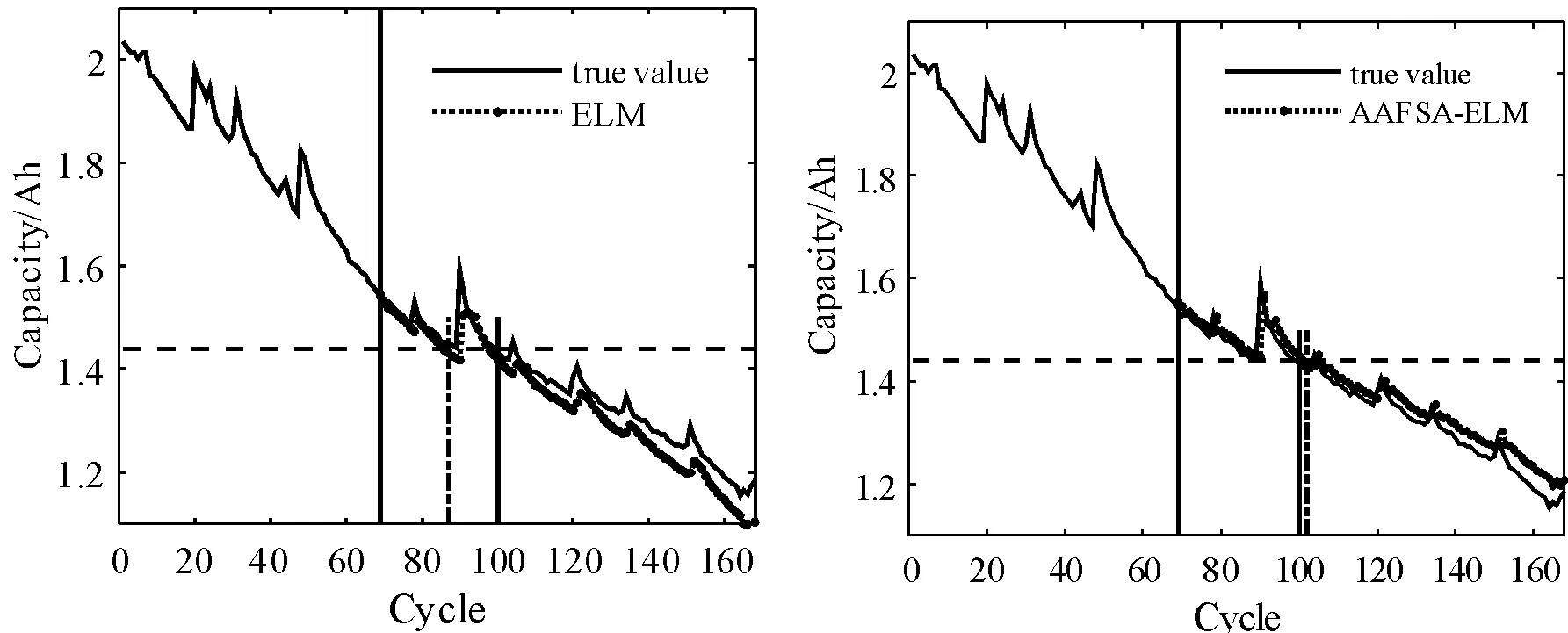
图4 B6电池40%总样本训练时预测结果曲线
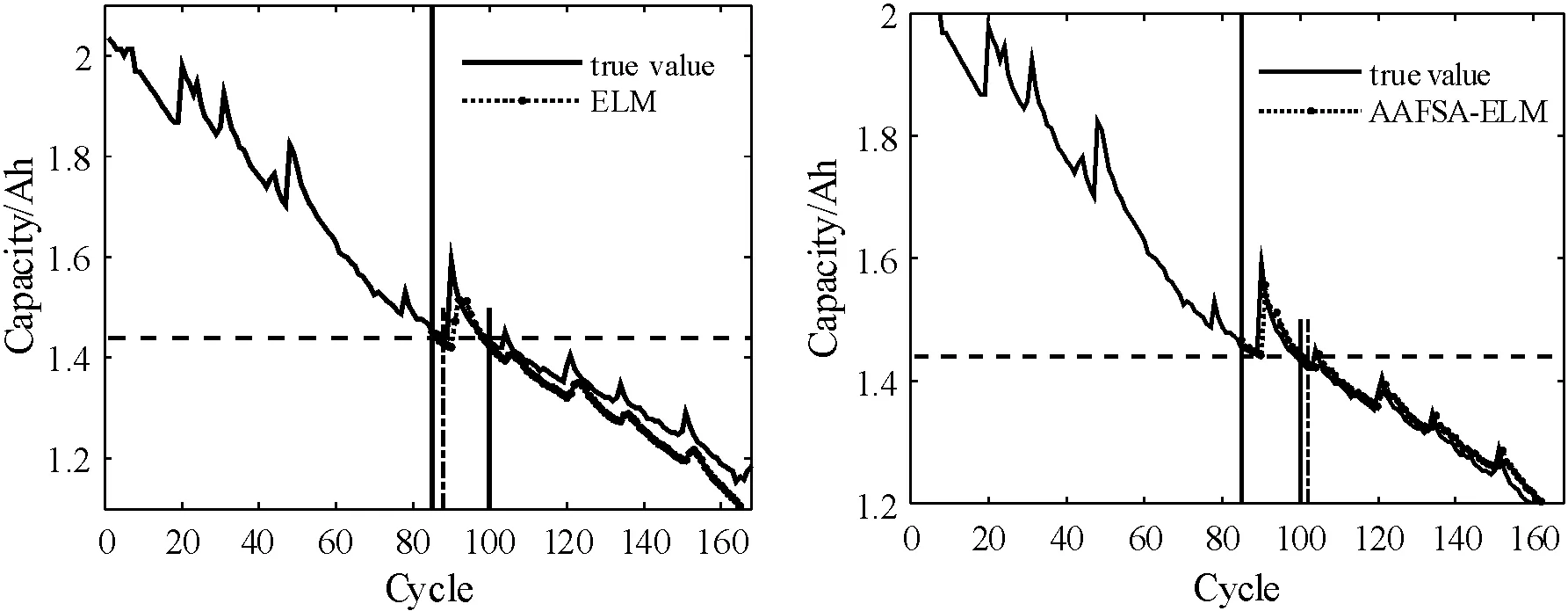
图5 B6电池50%总样本训练时预测结果曲线
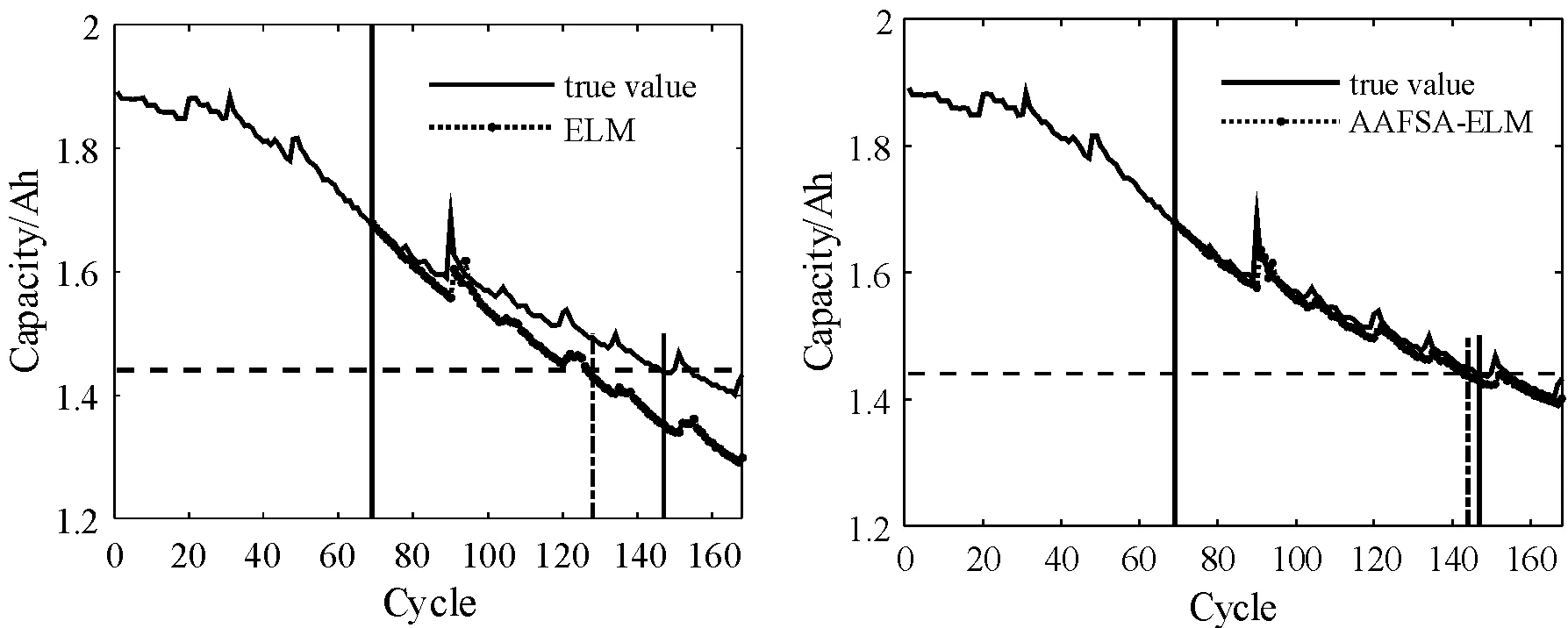
图6 B7电池40%总样本训练时预测结果曲线

图7 B7电池50%总样本训练时预测结果曲线
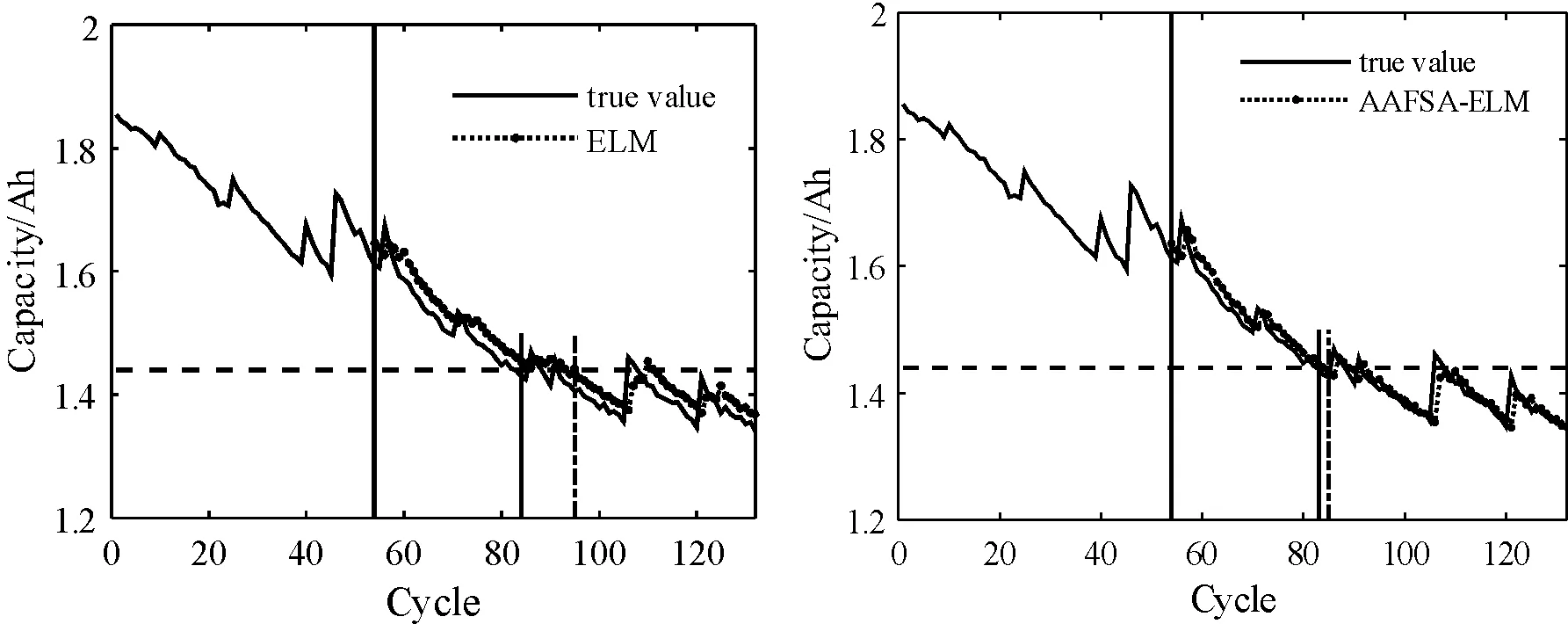
图8 B18电池40%总样本训练时预测结果曲线
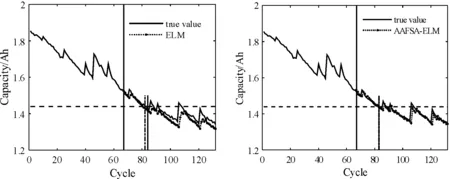
图9 B18电池50%总样本训练时预测结果曲线
可以看出:ELM和AAFSA-ELM都能够跟踪到锂离子电池性能退化状态,但是ELM方法由于随机生成隐层权值和偏差,无法保证以最优的精度跟踪退化过程,网络泛化性能存在不确定性。而经AAFSA参数优化后,ELM始终能够以最优参数实现锂离子电池剩余寿命预测,泛化性能显著提高,跟踪电池退化状态效果良好。
为进一步比较不同方法的预测性能,分别列出平均绝对误差(Mean Absolute Error,MAE)和均方根误差(Root Mean Square Error,RMSE)对各方法的预测结果,如表3所示。可以看出:本文提出的AAFSA-ELM方法预测结果的MAE和RMSE明显优于其他3种方法,而ELM方法的预测精度也优于SVR方法。例如对于B6电池,AAFSA-ELM预测结果的MAE和RMSE相比ALO-SVR降低了近50%,ELM与SVR预测结果也能得到类似结论。
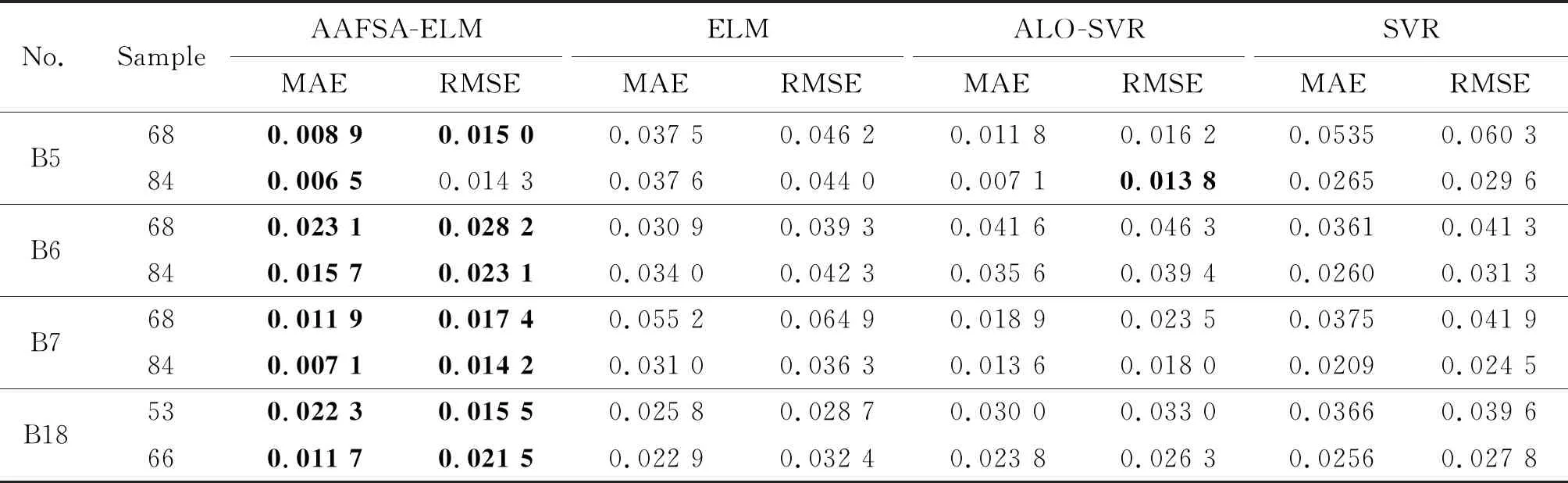
表3 不同预测模型性能比较
图10所示为以B18锂离子电池为例,分别采用AFSA和AAFSA对ELM隐含层参数寻优的收敛曲线,可以看出,以40%样本数或者50%样本数作为训练样本时,AAFSA的收敛速度和跳出局部搜索能力都要优于AFSA。
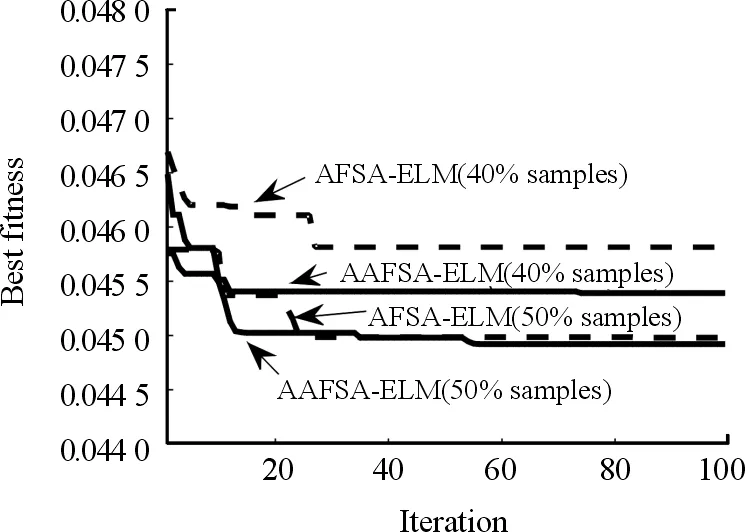
图10 AFSA与AAFSA网络训练收敛曲线Fig.10 Network training convergence curve of AFSA and AAFSA
6 结论
1) 锂离子电池安全问题已引发广泛关注,准确的剩余寿命预测模型能够帮助使用者提前掌握锂离子电池健康状态,预防性能退化导致的电池失效。
2) 基于数据驱动方法,针对ELM因隐含层权值和偏置随机生成引起预测结果振荡的问题,采用AFSA优化隐含层输入参数,并针对基本AFSA方法收敛速度慢、易陷入局部最优的问题进行改进,实现对ELM隐含层权值和偏置的优化,获得最优ELM网络结构。
3) 利用提出的最优ELM构建NASA Ames研究中心的4块18650锂离子电池剩余寿命预测模型:相比未优化的ELM方法,本文模型的预测结果更加稳定可靠,相比SVR及其改进方法在精度上具有显著优势,可为实现锂离子电池剩余寿命精确预测提供支持。
