基于缓冲特性控制的主动式悬浮背架效能评价
2022-03-16王亚平王希阔胡灿灿
王亚平,何 龙,2,王希阔,2,3,胡灿灿,张 颖
(1.南京理工大学 机械工程学院, 南京 210094; 2.中国兵器工业第二零八研究所, 北京 102202; 3.中国人民解放军63850部队, 吉林 白城 137001)
1 引言
使用背架携带负载相比软质背包具有以下优点:在背负大负载长距离运动时,背包形状不会随所装物品摆放位置不同发生变化,保护使用者腰、背部不受包内物体戳、撞影响;允许使用者根据重量合理分配物品摆放位置,避免压力集中于肩部或某一块肌肉,重力分配更合理,提高运动过程中负载稳定性;具有足够的强度,能够承载更大重量等[1-2]。
悬浮背架在单兵携行具、徒步背包上有着良好的应用前景。美国研究表明,悬浮背架在步行或跑动时能够大幅减少使用者背部、颈部、膝盖以及脚踝处所受冲击[3]。O’Donovan等[4]通过人体运动过程中足底压力、躯干弯曲角度、臀角以及代谢成本等方面,对悬浮背架效能进行了评价。Sniezek等[5]采用主观问卷调查收集了两名士兵完成步行和慢跑试验后对悬浮背架的评价。
根据人体在运动时背包重心位置的控制调节方式,悬浮背架分为被动式与主动式。被动式悬浮背架主要是利用弹簧等元件的力学特性对负载重心进行调整,Putra等[7]利用时钟弹簧设计了一款无源式浮动背包,通过建立背包固有频率的数学模型,得到了背包运动中振动幅值最大时所对应的运动状态,通过减少该状态下背包振动幅值达到减轻疲劳的目的; Martin J P等[8]计了一种使用弹簧加载的倒立摆悬挂承载装置,通过与运动时人体重心在冠状面的左右位移异步振荡,实现减少由于背包左右晃动给人体带来的压力;Roee Keren等[9]构建了一个弹簧阻尼系统模拟人行走时携带背包的悬挂系统,通过在人与背包间添加可切换离合器来实现背包和身体的弹性/刚性连接状态切换,最大限度减少能量消耗。
主动式悬浮背架是通过实时检测人体运动过程中步频、步幅或垂直方向加速度等运动状态的变化及负载特性,进行缓冲特性动态调整,实现减少人体所受冲击及做功的目的。Rome等[3]通过弹性元件将背包上下背架相连,通过控制弹性元件长度,调节背架缓冲元件刚度;Xie等[10]开发了一种频率可调悬浮背架,通过调节机构改变弹簧拉伸比,以调节系统刚度,并利用人体动能进行发电储能。
提出了基于缓冲特性控制的主动式悬浮背架,通过负载运动试验,获得基于人体肌肉肌电信号的积分肌电和中值频率等肌肉发力及疲劳特性值,上/下背架竖直方向位移、负载加速度及负载做功值,对主动悬浮背架与普通背架的效能特性进行了对比,验证了主动式悬浮背架的可行性,也为悬浮背架研制提供了理论支撑和参考依据。
2 主动式悬浮背架原理及结构
基于缓冲特性控制的主动式悬浮背架总体结构如图1所示,采用了双框架-滑轮原理,以背架框作为基本框架,其他模块按整体布局要求放置于背架框上。上背板、下背板、背架框、导轨支座与导轨组成下背架,下背架与人体通过肩带、腰封等连接;滑块与背包架组成上背架,背包固定于背包架。上背架沿固定于下背架的导轨做往复运动。上、下背架间采用弹性绳相连,弹性绳固定于绳夹1,绳夹1通过拉力传感器1和组成上背架的背包架相连,弹性绳绕过导向轮并穿过夹紧机构的夹紧轮,再次绕过导向轮后与绳夹2相连,绳夹2和拉力传感器2相连,传感器固定于下背架架体之上。
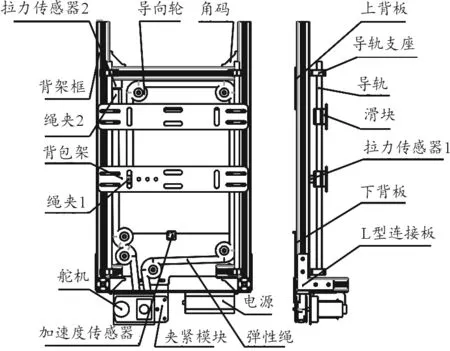
图1 背架整体结构示意图
弹性绳工作示意图如图2(a)所示。 图2(b)中背包架与夹紧机构之间,加深显示部分为弹性绳有效工作部分,起缓冲作用;图2(c)中夹紧机构与拉压力传感器之间,加深显示部分为弹性绳的非有效工作部分。使用舵机作为绳长调节执行模块,舵机安装于背架底部以降低背架重心,舵机输出轴与缓冲特性调节机构中夹紧轮固连。

图2 弹性绳工作示意图
缓冲机构刚度动态调整流程如下:主控芯片以1 s内运动参数均值作为输入,传递给控制系统,计算得到舵机转角,舵机控制信号控制舵机转动,并通过拉力传感器检测弹性绳非有效工作段拉力,计算得到弹性绳长度改变量,以判断是否为最佳有效工作绳长。舵机转动带动缓冲特性调节夹紧机构转动,从而调整弹性绳有效工作段长度,实现刚度调节。
3 主动悬浮背架效能仿真分析
3.1 主动悬浮背架机电耦合动力学模型
建立了主动悬浮背架机电耦合动力学仿真模型,如图3所示。图3(a)的左图为在ADAMS中建立的主动悬浮背架多体动力学模型。由于下背架与人体固连,因此人体运动作为输入运动直接加载于下背架上。图3(b)为在MATLAB中建立的绳长控制仿真模型。绳长控制模型接收来自动力学模型的输出参数,计算出目标有效绳长,根据舵机参数中舵机最大转速,计算出舵机最大转角,获得PWM脉冲宽度改变量,传入舵机控制模型中,舵机转角发生改变,实现弹性绳有效工作段长度的改变。新的绳长参数再传回ADAMS模型,以此循环直到仿真结束。
为考察主动控制系统对于不同运动状态的主动控制效果,假设人体运动振幅与频率均为正弦函数。如图3(a)中右侧曲线所示,幅值为振动幅度50 mm,变化范围从1~51 mm,周期为10 s的正弦波;频率为幅值4,变化范围从0.5~4.5,周期10 s的正弦波。因此,下背架随时间变化的垂直方向位移曲线如图4所示。
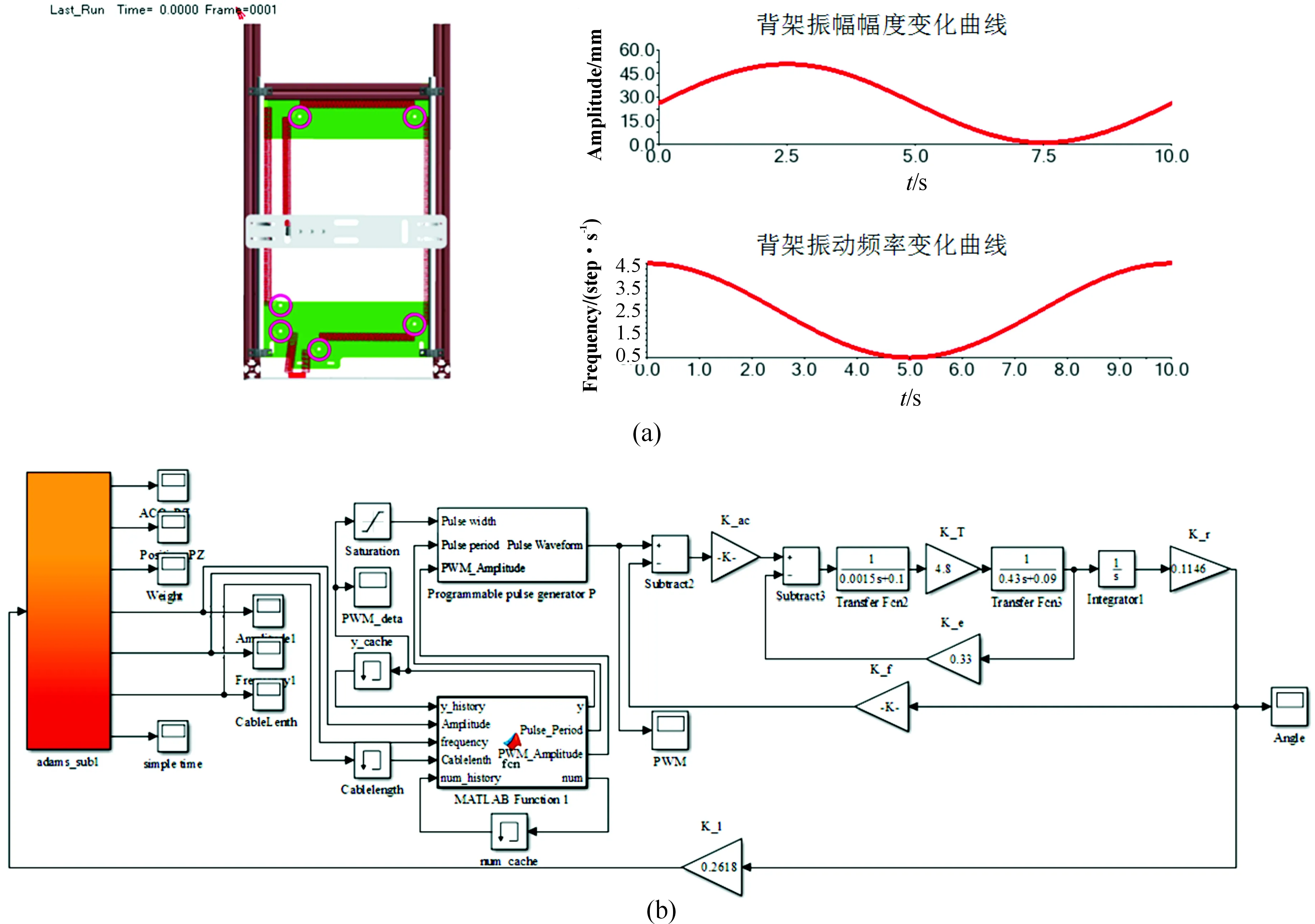
图3 绳长控制仿真模型
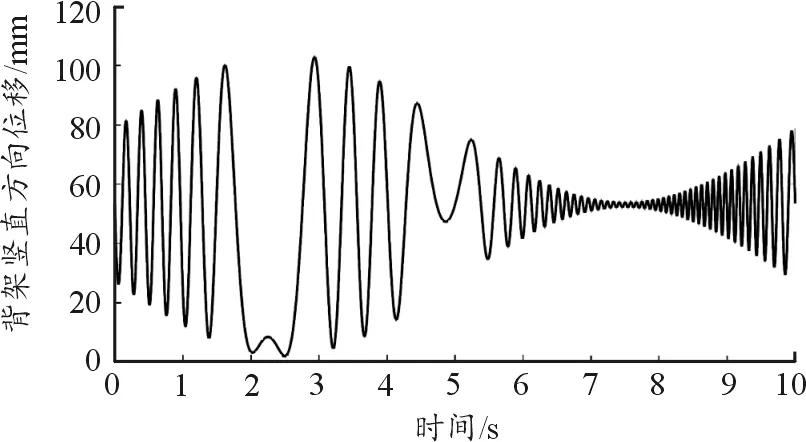
图4 下背架垂直方向位移曲线
通过仿真获得绳长改变量情况如图5所示,由于舵机响应时间和最小识别角度变化(0.87°)的影响,绳长变化值与期望值之间存在一定差异,但规律基本吻合。
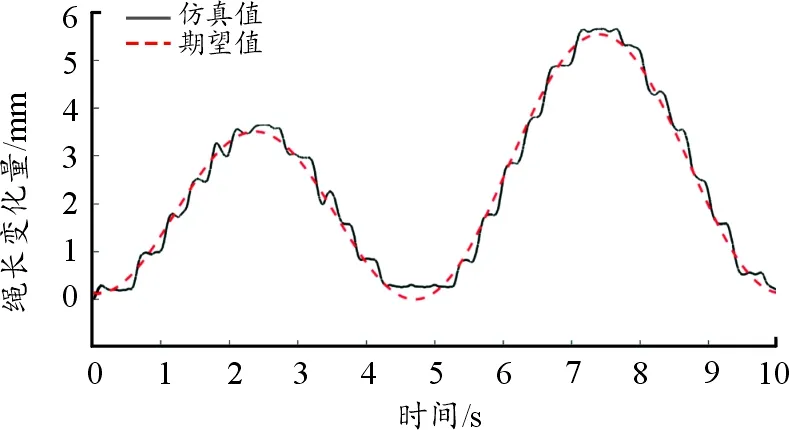
图5 有效绳长改变量曲线
3.2 不同背架动力学特性对比
首先进行了正常运动状态条件(人体运动垂直振动幅值50 mm,步频2.5 step/s)下普通背架、被动式悬浮背架、主动式悬浮背架的对比。图6为上背架垂直方向位移、做功、加速度曲线。可看出相较于普通背架、被动式悬浮背架,采用主动式悬浮背架时上背架垂直方向上位移、做功、加速度均有显著减小。与被动式背架相比,采用主动式悬浮背架时负载位移减小了30%、负载做功减小了50%、加速度减小了20%。
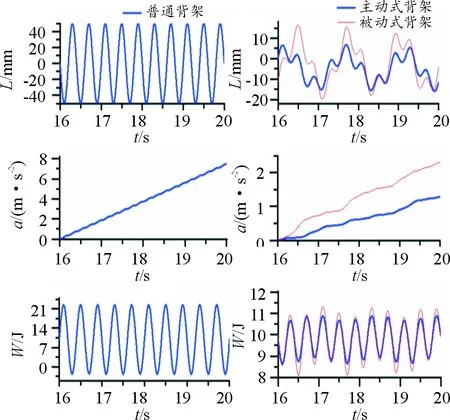
图6 正常步态下3种背架性能曲线
不同人体步态条件下,悬浮背架效能的提高程度不一样,对步态变化情况下背架的效能进行对比分析。假设人体运动振幅与频率与图3相同。图7为上背架位移、做功、加速度曲线,可看出相较于普通背架、被动式悬浮背架,采用主动式悬浮背架时上背架垂直方向上位移、做功、加速度均有显著减小。与被动式悬浮背架相比,采用主动式悬浮背架时位移减小了40%、做功减小了55%、加速度减小了20%,从位移和做功角度来看,主动式悬浮背架对变化步态具有更好的适应性。
4 主动悬浮背架效能试验分析
4.1 试验设计及评价指标
试验选择了3名身体健康状况良好的男性志愿者作为被试者。被试者试验前24 h内无剧烈体力消耗;试验前两周内无发烧、感染等炎症,未服用药物,无急慢性肌肉骨骼疾病。被试者基本信息:年龄25±3岁,身高175±8 cm,体重78±8 kg。
采用DELSYS表面肌电测试仪,具有16个采样频率4 000 Hz 的EMG通道,48个最大采样频率296 Hz的三维运动加速度通道。根据人体背负负载运动的动作特点,选取如图8所示腿部肌肉进行肌电测试[14]。
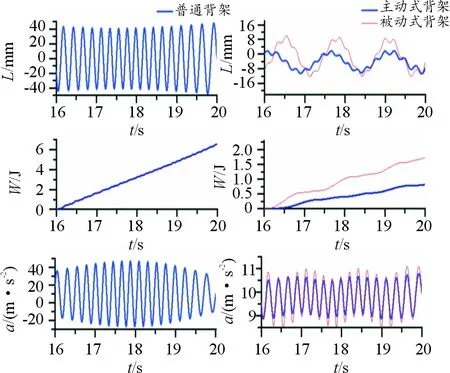
图7 变化步态下3种背架性能曲线
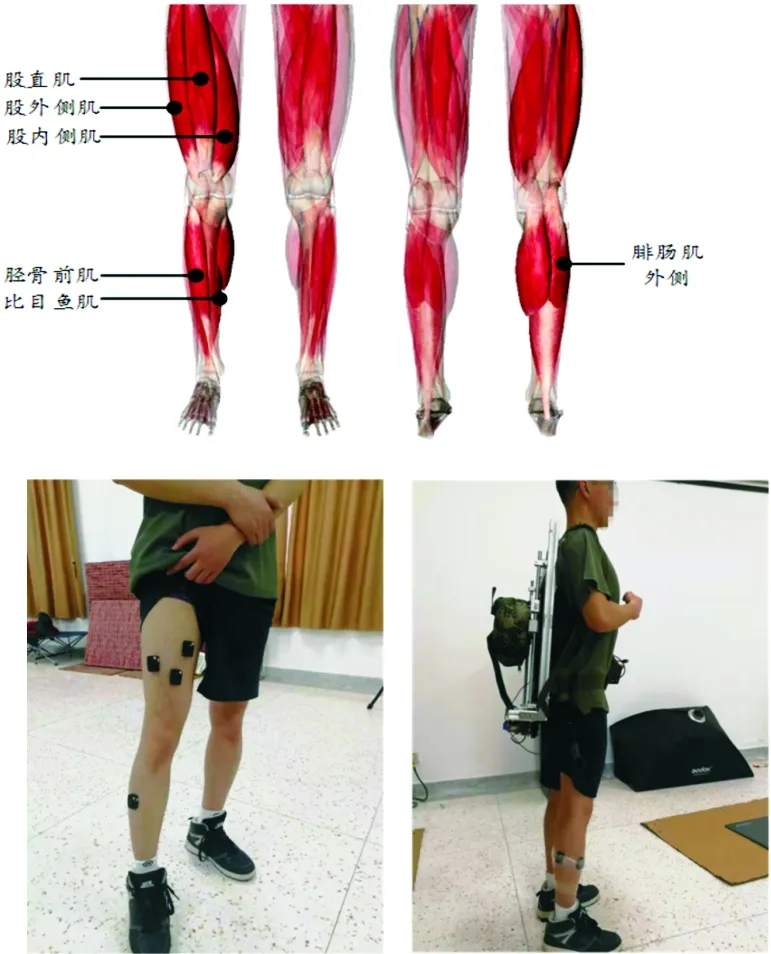
图8 腿部肌肉肌电测试状态
采用积分肌电值(IEMG)和中值频率(MF)作为肌电信号评价指标。运动过程中肌电信号的幅值变化情况,与参与运动的肌纤维数量、肌肉收缩力的大小成正相关,在一定程度上反映了肌肉的疲劳情况,积分肌电值(IEMG)为一段时间内肌肉活动过程中的放电总和,是反映肌肉疲劳程度的重要时域指标[13]:

(1)
式(1)中:t1为肌电信号开始采集的时间点;t2为肌电信号结束采集的时间点;H(t)为t时刻肌电值。
随着肌肉疲劳度的增加,肌肉运动单位发出的脉冲串时间间隔增加,从频域角度获得的中值频率也降低。中值频率是将频谱分成上、下面积相等的两部分的值所对应的频率[12],为了剔除干扰信号,对于肌电数据进行滤波处理后,中值频率(MF)可表示为:
(2)
式(2)中:f为频率;P(f)为功率谱密度估计函数;fmax为带通滤波上限值。
同时采用Codamation三维运动捕捉系统,获取上背架在垂直方向上的位移和加速度,对位移进行积分得到人体背负负载所做的功。由于运动捕捉系统视场范围有限,三维运动捕捉试验记录时间设定为7 s。由于在初始运动时,背架上下振动较大,故在振动趋于平稳后,运动捕捉系统开始记录数据。
室内试验环境25 ℃,无噪声、强光和气流等干扰。被试者在初始自然站立状态下听到命令后,依据节拍器以3 step/s的步频匀速行走,时长12 min,重复5组,每组试验结束后被试者摘下背架,休息1 h以上,以保证肌肉得到充分休息。试验现场如图9所示。

图9 试验现场图
4.2 下肢肌肉积分肌电对比分析
由于3位被试者下肢肌肉积分肌电值变化规律基本一致,故选取被试者2数据进行具体分析。被试者背负普通无缓冲背架和主动式悬浮背架下,积分肌电值如表1所示。积分肌电变化规律如图10所示。可以看出:2种背架下肌肉发力规律不太一致,主动式悬浮背架下腓肠肌外侧积分肌电值最大,无缓冲背架下股内侧肌积分肌电值最大。与无缓冲背架相比,主动式悬浮背架下大部分肌肉积分肌电值降低了,其中股内侧肌降低最为显著;但腓肠肌外侧积分肌电值增加了。整体上,采用主动式悬浮背架时被试者肌肉发力程度减小。
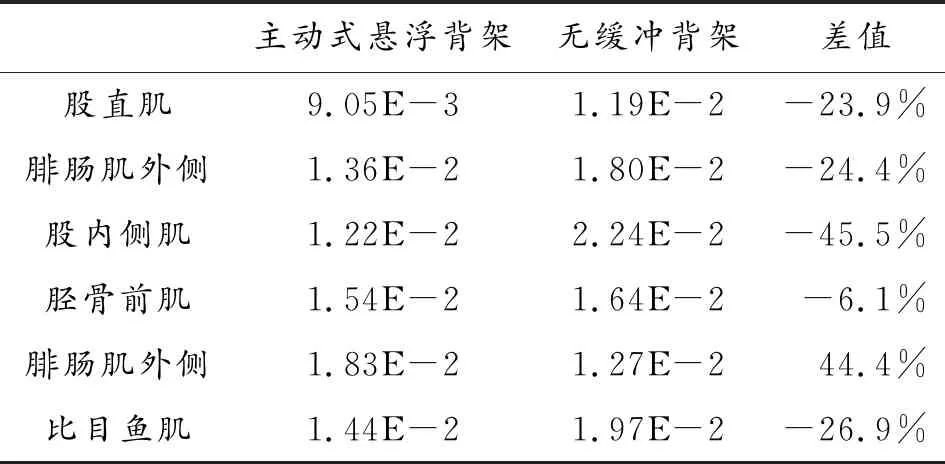
表1 肌肉积分肌电值 Table 1 IEMG v·s
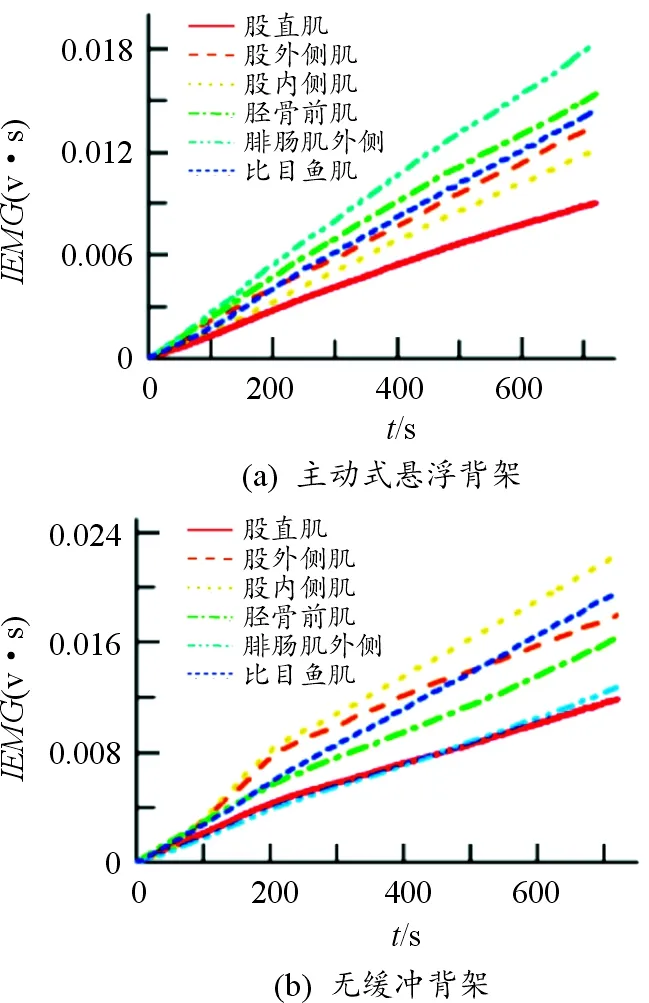
图10 2种背架下积分肌电变化曲线
4.3 下肢肌肉中值频率对比分析
针对滤波后的数据采用修正平均周期图法,利用2 s时间段内肌电信号数据点求取功率谱,计算出对应的中值频率[16]。再间隔1 s截取下一个2 s时间段的数据点获取下一个中值频率,以此类推求得整个过程的中值频率。
为方便观察中值频率变化规律,对中值频率曲线进行了二次曲线拟合。由于体质和锻炼水平不同,不同个体间同一肌肉在肌肉强壮性和肌肉抗疲劳能力上存在很大差异。因此3位被试者的肌肉中值频率特性规律存在较大差异,针对不同被试者的情况分别进行了分析。2种背架下不同肌肉的中值频率拟合曲线如图11。
被试者1在主动式悬浮背架下不同肌肉MF值存在较明显差别,股外侧肌与腓肠肌外侧肌肉兴奋度逐步提高,MF值未向低频移动,在运动中后期出现疲劳趋势;而胫骨前肌与比目鱼肌在运动开始即出现了MF值的大幅降低,在中后期MF值向高频移动,肌肉疲劳缓解。无缓冲背架下各肌肉MF值变化规律较为一致,股外侧肌、股内侧肌、胫骨前肌与股直肌在运动初期即发生MF值下移;腓肠肌外侧在运动前期肌肉兴奋度提高,在运动中期出现疲劳;比目鱼肌变化不明显。

图11 2种背架下MF变化拟合曲线
被试者2在2种背架状态下,所有肌肉的MF值整体上呈现向高频移动的趋势,主动式悬浮背架下股外侧肌与股内侧肌在运动后期出现MF值低频移动趋势,无缓冲背架下六块肌肉在运动后期均出现低频移动趋势。
被试者3在主动式悬浮背架下,股直肌在运动开始即出现了MF值降低,在运动后期MF值向高频移动;腓肠肌外侧在运动中后期出现MF值下移;其他肌肉均呈现向高频移动的趋势。在无缓冲背架下,股直肌运动开始即出现了MF值大幅度降低,在运动中后期MF值向高频移动;比目鱼肌在运动后期MF值向低频移动;股内侧肌在运动过程中MF值一直处于低频移动趋势;其他肌肉变化不明显。
将被试者运动结束时的MF与开始时的MF比较,获得MF降低的肌肉数量,再对整个运动过程中MF出现低频移动的肌肉数量进行统计,结果如表2所示。可以看出在主动式悬浮背架下出现MF降低及有降低趋势的肌肉数目均不大于无缓冲背架。

表2 2种背架下MF变化
4.4 背架缓冲性能分析
由于3位被试者2种背架状态下的三维运动数据变化规律基本一致,故选取被试者2数据进行具体分析,如图12为被试者在2种背架的上背架位移曲线、加速度及做功。
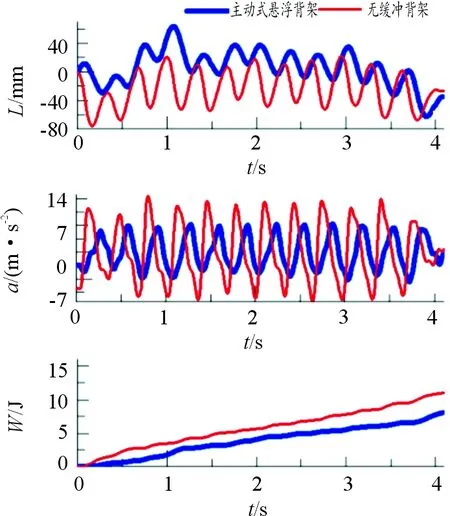
图12 上背架位移、加速度、做功曲线
从上背架位移曲线对比来看,2种背架振动频率基本一致,存在时间相位差,主动式悬浮背架下平均振幅约为35 mm,无缓冲背架下平均振幅约为65 mm,振动幅度减小了46%;加速度减少了48%;做功减少了21%。
5 结论
1) 主动式悬浮背架能够大幅度减少人体做功,对变化步态具有更好的适应性。
2) 与无缓冲背架相比,主动式悬浮背架下人体肌肉积分肌电普遍更低,腿部肌肉MF降低及有降低趋势的数目均不大于无缓冲背架;垂直方向上的振动幅度减少了46%,加速度减少了48%,人体做功减少了21%。
提出的主动式悬浮背架具有更好地缓冲性能,可以有效缓解人体肌肉疲劳度。
