自升式平台弦杆水动力系数的影响因素
2018-12-10田晓洁刘运祥刘贵杰谢迎春高志明
田晓洁, 刘运祥, 刘贵杰, 谢迎春, 高志明
(中国海洋大学 工程学院, 山东 青岛 266100)
0 引 言
自升式海洋平台工作环境复杂,波流载荷是平台所承受的主要载荷之一[1]。自升式平台桩腿结构比较复杂,通常由细长的杆件组成。在工程中最常用的波流载荷计算方法是莫里森方程,主要由拖曳力和惯性力两部分组成。利用该方程求解波流载荷的关键是确定合适的水动力系数(拖曳力系数Cd和惯性力系数CM)。
为确定Morison公式中的水动力系数,国内外学者做了大量实验研究。Sarpkaya等[2]对Cd和CM进行大量系统的实验研究,得到了Cd和CM与雷诺数Re和KC数的关系;任佐皋[3]通过水流-波浪槽实验得出波流场中的Cd值介于纯波动与稳流中的Cd值之间。Yuan[4]进行了静水和规则波作用于缓慢涌动的垂直圆柱模型的水动力实验研究。Lupieri等[5]通过实验分析了圆柱体模型在低KC数的情况下具有规则的波状流,且入射波峰平行于柱体。Bonakdar等[6]提出了M5模型树和遗传算法混合模型来求解水动力系数。Li等[7]对垂直于海床运动的管道进行水动力实验研究。高畅[8]对自升式海洋平台桩腿进行海流载荷和波浪载荷的实验并求出拖曳水动力系数。李少华[1]对海洋平台水动力系数的反演方法进行了研究。秦文龙[9]计算了南海北部湾处自升式平台在具体环境下的拖曳水动力系数。国内外学者对于水动力系数的取值已经得到了一些规律性的结论,并且为不同尺寸的桩柱结构物的计算提供经验值。但是,这些水动力系数的取值使得波流载荷的计算结果偏于保守,与平台实际环境中的波流载荷差别较大,不利于后续结构的优化设计、动力响应分析,以及对整体结构物的稳定性的分析[10]。因此,确定莫里森方程中拖曳力系数和惯性力系数的取值具有重要的研究意义。
目前关于自升式平台桩腿的水动力系数的实验研究,均是基于相似理论进行水池试验,在实验过程中的模型缩尺比、波流的入射角度以及桩腿上的齿条等因素对水动力系数的影响均没有考虑。本文选取桩腿的单弦杆作为研究对象,通过实验研究物模缩尺比、入射角度以及齿条对水动力系数的影响规律;并且通过多元线性方程,对水动力系数进行修正,为自升式平台桩腿结构物提供准确的水动力系数。
1 实验装置与方法
1.1 实验装置
本次单弦杆水动力实验在中国海洋大学海洋工程重点实验室的波浪水槽中进行,如图1所示。波浪水槽长30 m,宽3 m,高1.5 m,水槽两端装有大功率水泵用于模拟海流,最高流速为0.5 m/s;另造波装置可制造最大波高为20 cm,周期为1~2 s的波浪。
根据实验室的条件,结合单弦杆的几何特征,搭建了实验平台,其原理如图2所示。在实验水槽的顶部安装工装用于固定整套实验装置。在工装架下依次安装六维力传感器、金属连接盘、法兰盘以及弦杆模型。在波流载荷作用下,通过六维力传感器能测得弦杆所受的波流力,将测量的波流载荷转换为电信号传输给DH5902采集仪进行信号的采集与分析。同时在水槽中安装有波高仪位和流速仪,用于实时测量流速和波高参数。

(a) 实验水槽(b) 实验对象
图1 实验水槽及实验对象

图2 实验平台示意图
1.2 实验模型设计
考虑到自升式海洋平台单弦杆的模型缩尺比、波流的入射角以及齿条等因素的影响,设计不同组合的实验物模进行实验研究。为研究缩尺比对水动力系数的影响,将物模的缩尺比设计为1∶1、1∶2、1∶5、1∶10;同时设计光滑单弦杆物模和带齿单弦杆物模。根据实际自升式平台单弦杆的尺寸,采用几何相似的原理,设计不同尺寸的实验物模,具体尺寸和参数如表1所示。

表1 实验物模参数表 mm
为避免模型本身重力对实验结果造成影响,同时便于物模的更换,选择比较轻质的材料,本次实验选用有机玻璃管作为实验物模材料。当波流参数较大时,为避免模型在实验过程中损坏,前期采用ABQUES对有机玻璃模型进行极限实验工况下的模拟仿真,结果显示有机玻璃满足实验强度要求。在制作物模时顶端和底端都要做好密封处理,防止内部进水;顶端端面打孔与上部的测试仪器连接,实验物模如图3所示。
1.3 实验安排
水动力实验分为海流实验组和海浪实验组,为保证实验的有效性,设计5组海流参数、5组波浪参数和4组入射角度,具体参数如表2所示。根据图2搭建的单弦杆实验平台,设置波流水槽内水深为1.2 m,依次安装不同特征的单弦杆,分别模拟不同参数的海流、海浪实验工况。在进行带齿条弦杆的实验时,需要考虑波流入射角度对水动力系数的影响,设置了4种不同角度,具体如图4所示。每组实验至少进行3次,以保证实验数据的有效性与可靠性。

(a) 光滑单弦杆模型

(b) 带齿单弦杆模型

表2 水动力实验参数表

图4 实验物模装配及波流入射角
2 分析方法
2.1 实验结果分析
考虑到实验组数较多,数据量庞大,仅以1∶2光滑单弦杆的实验数据为例来说明数据处理的过程,如图5所示。六维力传感器能够采集模型3个维度上所受的实验力载荷和弯矩载荷,在此为了使采集的主要数据显示的更加清晰,故不将实验中的弯矩载荷数据显示,同时图中显示的数据均是截取海流载荷相对稳定时的采集数值[11]。由图5可以看出,水平力Fx值相对平稳,故可以取此时间段载荷平均值作为该工况下的海流载荷值;弦杆物模在垂直于池壁方向上是不受载荷的,故Fy=0;对于当单弦杆物模在竖直方向上时一方面由于重力与浮力的相互作用而受力,另一方面单弦杆物模同时会受到海流对其的升力作用,所以单弦杆物模在竖直方向上的受力Fz不等于0;而本次实验只分析实验模型在波流传播方向上的受力载荷,故对Fz不予考虑。

图5 海流实验数据采集图
基于Morison方程,根据
(1)
结合实验工况下的波流力可以推出Cd。根据
(2)

2.2 回归分析法
针对现有的实验因素以及实验结果,结合SPSS软件中提供的回归分析方法,采用回归分析模型进行回归分析,定量描述水动力系数与影响因素之间的关系。回归分析[13]是用于确定两种或两种以上变量间相互依赖的定量关系的统计方法,能够反映统计变量之间的数量变化规律,是研究者精准的掌握自变量对因变量的影响程度和方向的有效方法。其线性回归的数学模型如下所示:
yi=αi+βi1χi1+βi2χi2+…+βikχik+ζi
(3)
式中:α、βik为待估参数;ξ为随机误差项;χik为解释变量。
被解释变量的变化可以由组成的线性部分α+Xβ和随机误差项ξ两部分解释。但是得到的线性回归方程不能立即用于对实际问题的分析,必须对得出的回归方程进行相关的统计检验,包括回归方程的拟合优度检验、回归方程的显著性检验、回归系数的显著性检验、残差分析等。
3 结果分析与讨论
3.1 影响因素分析
3.1.1物模缩尺比的影响
图6为弦杆在各海流速度下,缩尺比与Cd的关系曲线。从图中可以看出,Cd的取值在0.72~1.12之间;随着缩尺比的减小,Cd值不断减小;对于同一个实验模型,Cd随流速的增大而增大,当流速大于0.2 m/s时,Cd取值趋于稳定,且各缩尺比的Cd值变化趋势大体一致。不同缩尺比的Cd值仍在一定范围内,取值范围随缩尺比的增大而整体下移。根据雷诺数公式,雷诺数随着弦杆直径的减小而减小,从而验证了Cd随雷诺数Re的减小而呈减小趋势[14]。

图6 单弦杆缩尺比与Cd关系曲线图
图7为CM与缩尺比的关系,可以看出,CM的取值范围约在1.7~2.05,CM整体上随缩尺比的减小而增大。这是由于随着弦杆直径的减小,KC数逐渐增大,符合CM随着KC数的增大而逐渐增大的趋势[15]。
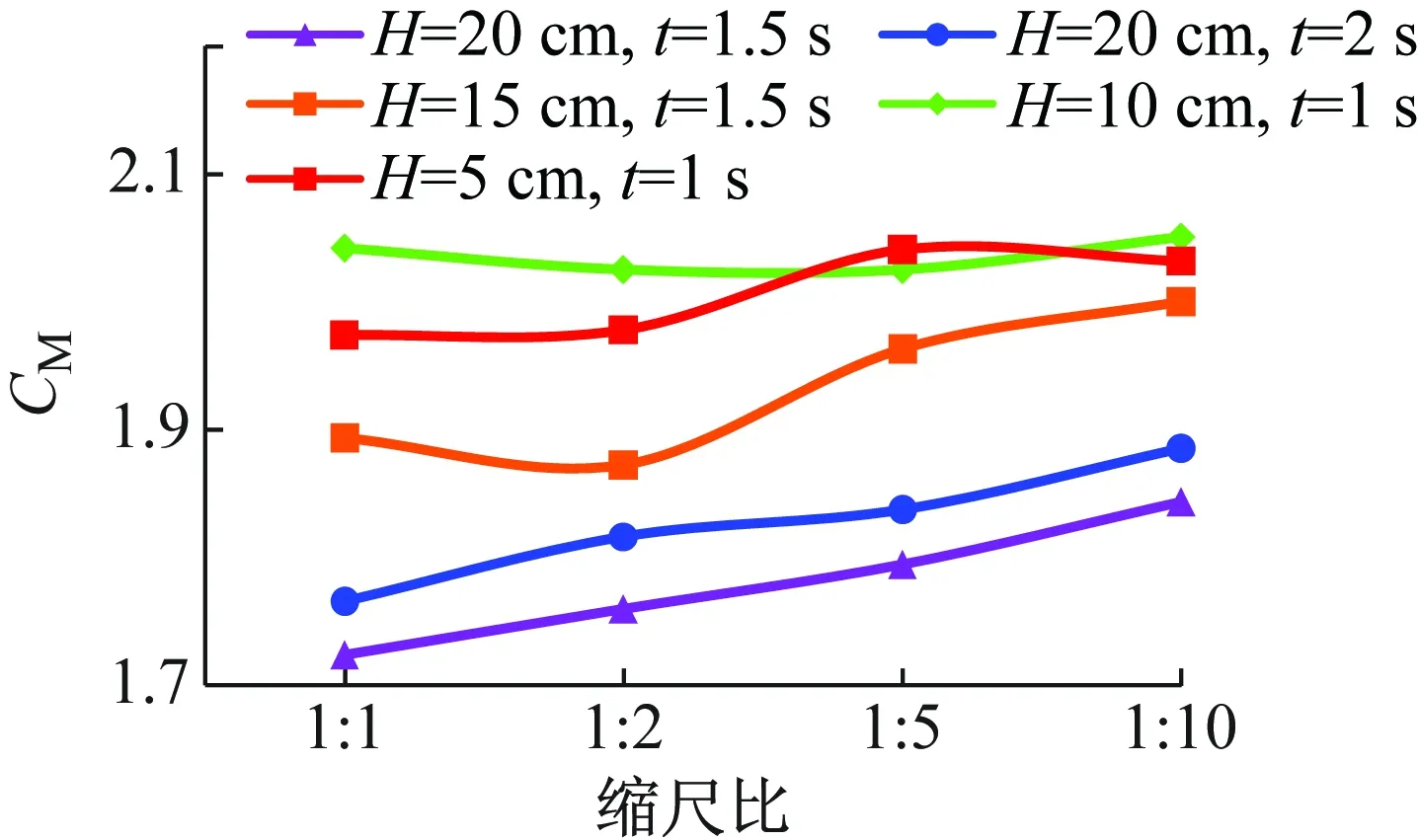
图7 单弦杆缩尺比与CM关系曲线图
3.1.2齿条的影响
图8为在1∶1的实验模型条件下,齿条因素与Cd的关系曲线,带齿弦杆的Cd值在1.8~2.2,光滑弦杆的Cd值在0.7~1.2。说明在相同工况下,Cd值的变化与模型的投影面积及模型在垂直于流速方向上的模型形状具有很大关系,齿条的存在明显使Cd值增大,相应的物模所受的海流载荷变大。

图8 齿条因素与Cd关系曲线图
图9为1∶1弦杆有、无齿条与CM的关系,带齿弦杆的CM值相对于光滑杆件的变化较小。说明在相同的工况下CM值受模型的投影面积及模型在垂直于流速方向上的模型形状影响较小。

图9 齿条因素与CM关系曲线图
3.1.3齿条入射角的影响
图10为不同流速下1∶1带齿弦杆模型入射角度与Cd的关系曲线。从图中可以看出,带齿弦杆的Cd值随入射角的增大而减小,0°、30°、45°、90°的取值分别在1.9~2.2、1.4~1.7、1.2~1.4左右。这是因为当齿条位于物模正投影区域内部时,齿条对Cd值的影响较小且呈微弱减小趋势;当齿条位于物模正投影区域外部时,齿条对于Cd值具有明显的影响,且随着齿条正投影面积的增加其影响作用加大。

图10 入射角与Cd关系曲线图
图11为1∶1带齿弦杆不同入射角度与CM的关系,可以看出,CM值随入射角度的增大而微弱减小,各角度下的CM值在一定范围内微小波动。由式(2)可以看出,波浪载荷由拖曳力和惯性力两部分组成,其中投影面积只影响拖曳力部分,而不会影响惯性力。因此投影面积的大小对波浪载荷的影响较小。
3.2 基于线性回归的数据分析
以弦杆模型有无齿条、模型缩尺比、波流入射角度3个影响因素为自变量,以水动力系数Cd、CM为因变量进行线性回归分析。经检验得出水动力系数Cd、CM与模型齿条、缩尺比、入水角度的多元线性回归方程为:

图11 入射角与CM关系曲线图
Cd=0.905+0.81m+0.131n-0.017q+
0.212mn-0.003nq+8.092×10-5q2
(5)
CM=1.998+0.089-0.225n-0.001q+
0.026mn-0.001nq+0.145n2+
9.315×10-6q2
(6)
式中:m表示有无齿条,取值为0或1;n表示缩尺比,取值范围为0~1;q表示波流入射角度。
为检验该方程的有效性,将实验测得的Cd、CM值与回归方程值进行比较,分析其差值并作图,如图12和13所示。

图12 Cd回归值与实验值差值结果

图13 CM回归值与实验值差值结果
由图12和13可以看出,回归值与实验值的差值大多数分布在3%~4%以内,其中Cd最大差值是7.52%,CM最大差值是3.41%。误差比值整体可以接受,表明拟合的方程式能够客观地描述水动力系数Cd、CM与模型齿条、缩尺比、入水角度的关系,这在一定程度上为后续水动力系数的研究以及平台的设计制造提供了参考和数据支撑。
4 结 语
本文针对自升式海洋平台弦杆的水动力影响因素,通过在实验水池内搭建测试平台分别研究缩尺比、入水角度以及齿条对Cd和CM的影响,并通过回归的方法进行了实验数据的处理,定量描述水动力系数与模型齿条、缩尺比、入水角度之间的关系。本文的研究工作可为数据处理、传感器技术、软件技术和流体力学等方面提供本科教学和大学生科研创新训练,较好的应用到实践教学中去。
