40 m双体全自动水上垃圾清扫船的研制
2018-08-07占金锋
占金锋
(天海融合防务装备技术股份有限公司,上海 201612)
0 引言
随着环境问题日益突出,水环境保护越来越受到人们的关注。水面漂浮垃圾的污染已经逐步威胁到市民的饮水安全、环境卫生及市容市貌,因此,机械化清理水面垃圾已成为重要的水环境保护措施。
目前,国内外对水面垃圾的清理一般采用人工打捞方式和机械打捞方式。人工打捞水面垃圾方式利用半舱式或甲板机动驳船, 由环卫工人手持网兜等工具站在甲板边上直接将垃圾捞上来。这种作业方式劳动强度大、工作环境恶劣, 效率也十分低下。 传统的机械方式采用翻斗式和导向门式设计的水面垃圾清理船,利用液压装置对垃圾进行打捞。这种水上垃圾清理船一般为单船体,由收集装置、存储装置等组成。收集装置的形式主要有传送带、翻斗以及造流收集等,其作用是把前方的漂浮垃圾引导过来, 收集到专用的垃圾存储箱内。这种船舶尽管已经实现了机械化作业,效率较人工打捞方式有所提高,但仍然存在船舶甲板面积太小,作业设备布置干涉太多,船员工作居住环境较差,自动化程度还不够高,垃圾收集范围及速率仍有限,不能实现连续运转作业等问题。因此,随着各城市对水环境治理的日益重视,研制更加高效、适用的新型水上垃圾清扫装备十分必要。
基于原建造交付的30 m以下的批量垃圾清扫船,进一步从船舶主尺度及船型选择、功能及布置综合、设备与系统集成、自动化控制应用等方面研究改进,优化设计了新型40 m双体全自动水上垃圾清扫船型。其主要技术性能指标达到和超过了原设计任务书的要求,较原来水上垃圾打捞清扫船在功能布置、人员居住、自动控制及作业效率等方面有了较大的提升。
1 船舶主要技术参数及总体布置
1.1 船型及清扫作业流程
近年来,设计建造的批量专用水上垃圾清扫船,通过设置清扫打捞装置与液压调节装置、伸缩式电动皮带输送机、电子皮带秤、双螺旋压榨机组,将垃圾秤重后,经过伸缩式电动皮带输送机集中输送至伴行的船舶货舱内。而最新设计建造的40 m双体全自动水上垃圾清扫船基于原批量船型进行优化改进,加大了船体尺度,提升了作业效率,增强了自动化功能,实现了清扫、打捞、装卸一体化作业。该船为双体船型,主甲板为垃圾输送及转运区域,包括液压清扫打捞装置与液压调节装置、伸缩式电动皮带输送机、电子皮带秤、储存转运装置。全部作业设备的控制系统采用就地操作模式,同时在驾驶室设置全部设备的应急切断按钮,配置手持式无线遥控器,作业效率得到极大提升,自动化程度较高。该船作业流程如图1所示。
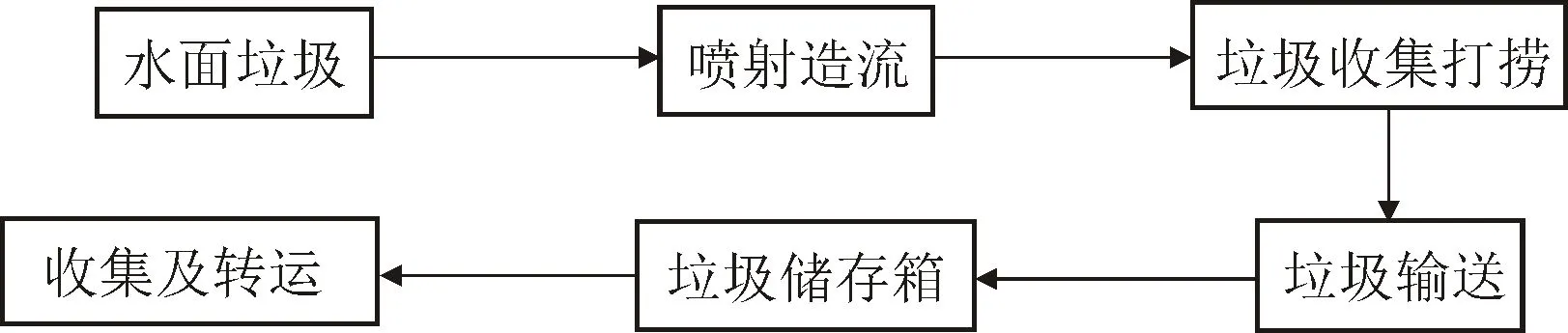
图1 全自动垃圾清扫船作业流程图
1.2 船舶主要技术参数
最大船长
~42.00 m
总长
~37.50 m
水线长
37.45 m
两柱间长
36.00 m
最大宽度
8.60 m
船宽
8.20 m
片体宽
2.70 m
型深
2.60 m
设计吃水
1.80 m
排水量
~260 t
最大航速
~10 kn
船舶定员
9人
清扫打捞作业宽度
~2.6 m
最大保洁宽度
~12 m
清扫打捞作业深度
~0.5 m(水面以下)
1.3 总体布置
本船为对称线型双体船的内河机动专用工作船,船体采用单底、单壳、单甲板、艉机型、全钢质全焊接结构形式,动力装置采用双机、双桨、双舵的推进方式。根据中国船级社(CCS)的规范和中华人民共和国海事局的规则中关于内河A 级船舶的要求进行设计。
主甲板上布置垃圾输送及转运设备。驾驶甲板设置船员、工作人员住居及生活舱室、会议室、船舶驾驶室等,配备生活设施及相关船舶操控设备。
40 m双体全自动清扫船又作为工作母船,在艉部配置辅助工作子船。工作子船平时安放在主甲板上,独立作业时可下沉至水中自主航行。工作子船的收放过程由母船自带的升降平台独立完成。升降平台载重量为5 t,最大尺寸为7 m×2.6 m。该平台采用液压控制方式,通过叉车导轨升降形式可下沉至水下0.8 m水深处,也可上升至主甲板平面。同时,通过母船下层空间的甲板横梁,设置2 根导轨 (船舯区域),可参考伸缩舷梯形式,配挂1 台电动葫芦,将升降平台上作业装备所收集与储存的漂浮废弃物吊运至母船的储存转运装置中。
40 m双体全自动水上垃圾清扫船总体布置示意图如图2所示。
2 船舶主要功能及清扫装置的配置
2.1 主要功能
水面垃圾全自动清扫船针对水面环境污染的问题,致力于湖泊、河流等水域的固体垃圾清理,如:塑料袋、饮料瓶、树枝树叶、其他易清理的水面垃圾,以及水葫芦等水生物的清理。它自动将水上漂浮的垃圾从水面打捞后,直接装运或者经压缩后装运到垃圾处理厂进行处理。开发设计的40 m双体全自动水上垃圾清扫船作为服务国内各内河水域的多功能保洁作业船,当前主要适用于上海黄浦江景观水域及相关水域收集水面垃圾及漂浮废弃物,并且满足水生植物高发时期定点打捞、连续转运的作业需要。同时,能将收集的垃圾自动卸载到指定的装载船、岸上码头、垃圾运输车等相应设备上。
2.2 清扫装置配置
本船主要作业设备包括:液压开启导流装置、消防水炮喷射装置、液压清扫打捞装置与液压调节装置、伸缩式电动皮带输送机、电子皮带秤、储存转运装置。全部作业设备的控制系统采用就地操作模式,同时在驾驶室设置全部设备的应急切断按钮,配置手持式无线遥控器。此外,船艉设置升降平台,便于工作子船在作业工作母船上实现收放自如。
(1)液压开启导流装置通过各个片体艏部由液压驱动的襟翼舵形式导流装置进行水流导向,有利于水面漂浮物进入液压清扫打捞装置的前端。同时,还有利于增加保洁作业船舶对水域清扫面的宽度,能够明显提升清扫打捞的保洁范围。
(2)消防水炮喷射装置由船艏左右舷分别设置的一套消防水炮(规格:喷射流量17 L/s、射程40 m)组成,日常作业时使用靠岸侧的一套消防水炮,或者同时使用两套消防水炮在船艏交叉喷射。机舱内设置两台消防炮专用泵(规格:60 m3/h×0.75 MPa)作为水炮喷射装置的动力水源,提供具有较高压力的消防水。该系统在船舶作业时进行人工喷水造流,可以更好地打捞收集靠岸死角处的漂浮垃圾,也可以较好地驱赶或拦截水面漂浮物引导进入清扫打捞装置前端。
(3)清扫打捞装置的输送形式采用先进的排链式。输送链条由高强度尼龙扣、不锈钢链轴和连接片组成,尼龙扣上带有的突齿能有效勾挂漂浮水生植物,其间隙能在整个清扫打捞过程中保证漂浮水生植物的充分滤水。主要技术参数为:安装角度30°~35°,链齿运动速度10~15 m/min,链齿有效宽度2.6 m,浸入水深0.5 m,采用电动形式,通过变频启动及调速。该装置升降采用液压驱动,通过顶升油缸的动作来实现清扫打捞装置角度的调整。
(4)电子皮带秤由四部分组成:称重桥架、称重传感器、速度传感器及测速滚筒、称重控制器。主要参数为:称重范围0.5~200 t/h,皮带宽度约3 m,称重区标准长度约2.4 m,皮带输送机倾角18°,计量精度±0.5%。
(5)储存转运装置的输送形式采用先进的排链式,其输送链条由不锈钢链轴和连接片组成,其间隙能在整个清扫打捞过程中保证漂浮水生植物的充分滤水。主要技术参数为:安装角度0°~20°,链齿运动速度3~8 m/min,链齿有效宽度2个×1.6 m,四周的挡板高度1.5 m,储存容积约60 m3。储运装置正转工况时进行收集储存,反转工况时输送转运。
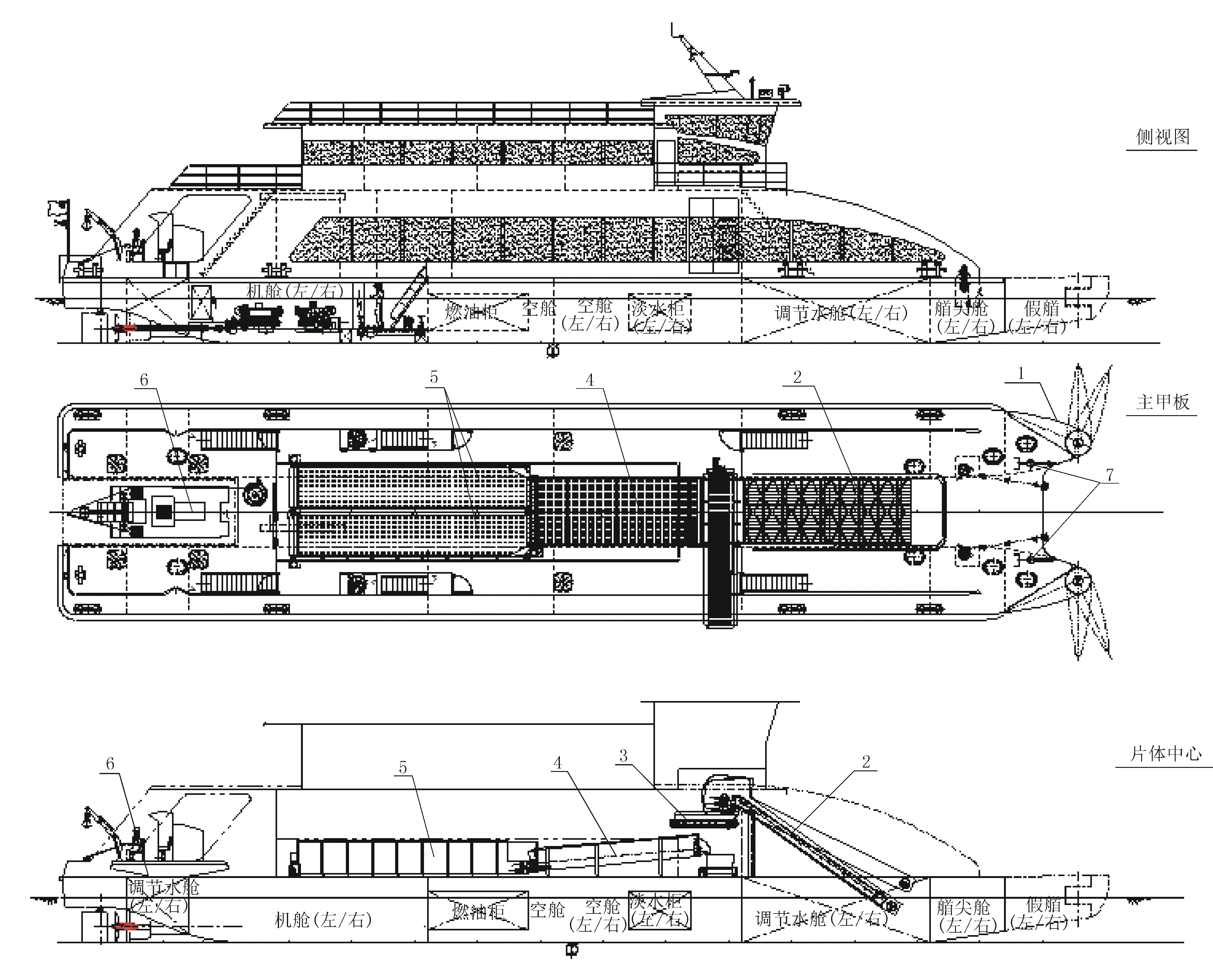
1—导流装置;2—垃圾清扫装置;3—电子皮带秤;4—垃圾转运装置;5—垃圾存储装置;6—液压升降平台;7—消防水炮引流装置。
(6)伸缩式电动皮带输送机承接垃圾并将其传送到伴行的船舶货舱里。主要技术参数为:输送带额定称量30 kg/m,输送带工作速度60 m/min,输送带有效宽度1 m,输送机伸缩有效行程10 m。
3 船舶主要特点及创新点
(1)本船采用双体船型,较好解决了专用设备布置及船员居住空间的矛盾,提高了船舶的稳性和工作人员的舒适性。中部空间区域便于安装整套清扫、转运装置,使船型与专用设备能够完美结合。同时,清扫及转运设备布置在中部空间,在两舷侧设置整体玻璃幕墙,使本船相对其他清扫船外观更为协调,美观大方。
(2)本双体全自动清扫船采用母子船组合形式,可作为一艘工作母船,配置辅助工作的若干工作子船。子船通过液压升降平台放入水中,还可将子船清扫的垃圾收集到母船上。这样作为大型清扫船作业时,可以通过配备的子船在角落、汊流、浅水滩涂等区域进行辅助和补充清扫,做到清扫无死角,并行作业,能极大提升作业效率。
(3)艏部设有流线型襟翼舵型式液压开启导流装置,在船舶航行时收回以减小航行阻力。工作时由液压驱动各个片体艏部进行水流导向,这样有利于水面漂浮物进入液压清扫打捞装置的前端。同时,还有利于增加保洁作业船舶对水域清扫面的宽度,最大达到约12 m,明显提升了清扫打捞的保洁范围。
(4)设有高压消防水炮喷射装置来造流。日常作业时使用靠岸侧的一套消防水炮,或者同时使用两套消防水炮在船艏交叉喷射,进行船舶特殊作业时的人工喷水造流。这样可以更好地打捞收集靠岸死角处的漂浮垃圾,也可以较好地驱赶或拦截水面漂浮物并将其引导进入清扫打捞装置前端。相对于一般清扫船所设置的明轮式或机械式造流更为有效,作业更为方便。
(5)清扫打捞装置的输送形式采用先进的排链式,其输送链条都是由高强度尼龙扣、不锈钢链轴和连接片组成,尼龙扣上带有的突齿能有效勾挂漂浮水生植物,其间隙能在整个清扫打捞过程中保证漂浮水生植物的充分滤水。清扫打捞装置升降采用液压驱动,并通过顶升油缸来实现变幅。清扫打捞装置安装角度的调整,可以满足不同根深的漂浮水生植物打捞作业的工况要求。
(6)整套清扫打捞装置可实现机旁手动及驾驶室自动控制,同时还配备有手持式遥控器控制,能够实现多工位、全自动的灵活操控。本船设置的垃圾电子称重装置,能实现打捞转运垃圾的科学计量,既便于垃圾量的统计计量,又能有效实现转运装载垃圾船舶及车辆的吨位统计,避免超载。
4 结语
近年来,设计建造的批量水上垃圾清扫船,从收到船东的使用反馈意见来看,其主要技术性能指标达到和超过了原设计任务书的要求,在很大程度上提高了我国水上垃圾打捞清扫装备的整体水平。40 m双体全自动水上垃圾清扫船建成交付后,在上海黄浦江45 km景观水域保洁及水面垃圾清扫中发挥了重要作用,组合子母船协同作业,效率极大提高,使用效果十分良好,为上海水域环境保洁提供有力的保障。如今,随着社会经济的飞速发展,环境问题日益突出,水环境保护也越来越受到人们的关注。水上清扫保洁船的需求量很大,因此不断优化改进的40 m双体全自动水上垃圾清扫船具有良好的市场前景。