虚拟3D技术中摄像机云台姿态高精度定位测试方法研究
2016-06-27贾云飞
贾云飞, 陈 杨, 边 鹏
(1. 南京理工大学 机械工程学院, 南京 210094; 2. 北方华安工业集团有限公司, 齐齐哈尔 161000)
虚拟3D技术中摄像机云台姿态高精度定位测试方法研究
贾云飞1, 陈杨1, 边鹏2
(1. 南京理工大学 机械工程学院, 南京 210094; 2. 北方华安工业集团有限公司, 齐齐哈尔 161000)
摘要:本文着力于摄像机云台高精度定位测试方法研究, 使其在虚拟3D图像合成过程中, 可通过控制摄像机云台动作完成虚拟3D图像合成. 本系统在摄像机云台上加持多路传感器, 感受摄像机云台姿态变化; 通过以高速控制芯片为核心的主控箱模块进行传感器数据采集与数据处理; 解析同步信号并同步向3D合成工作站发送云台姿态信息, 最终完成3D图像合成. 经过实验, 系统可以高速、 准确地采集到多路高精度传感器数据并同步发送至3D合成工作站, 且具有良好的稳定性, 能够满足摄影所需的长期开机的工作要求.
关键词:虚拟3D; 摄像机云台; 高精度定位; 三维运动学模型
0引言
虚拟3D图像合成的特点是通过识别采集摄像机云台的动作来完成虚拟3D图像和视频图像的实时合成, 其关键技术是对摄像机云台的高精度定位, 以保证合成的连贯性. 图像识别技术是在虚拟演播室的蓝背景板上刻画具有一定特征的深蓝色格子, 计算机对摄相机拍摄的特征图像进行匹配识别, 可以获取摄像机的推拉及方向等姿态变化, 从而完成虚拟3D图像与视频图像的合成[1], 图像识别技术相比于本文所述的机械定位式的缺点有:
1) 其工作过程中需要蓝背景板, 限制了其只能在虚拟演播室中使用;
2) 计算机需要对网格图像进行匹配识别, 数据处理时间长, 加大了视频延时量, 此时摄像机拍摄信号需要专门延时才能和虚拟演播室主机相同步;
3) 因为摄像机必须拍摄到蓝格子, 所以在演播室拍摄过程中, 摄像机不能让物体全部挡住蓝格子;
4) 理由同3)所述, 不能实现无限蓝箱功能;
5) 由于是对视频图像进行算法识别处理, 关键的精度问题得不到保障[2].
本文所述机械定位式方法, 在摄像机及云台上进行改造, 在摄像机云台各个特征位置加持传感器, 为了实现对多路传感器数据采集与处理的高实时性和高精度等要求, 本系统基于单片机技术、 串口通信技术、 差分信号-TTL电平技术以及从视频信号中提取同步信号技术, 设计出了一套高精度定位、 高实时性、 低功耗的嵌入式摄像机云台姿态采集系统, 可完成对摄像机云台姿态信息的高速采集与数据处理和数据的同步发送. 经试验证明: 该系统能对摄像机云台进行高精度、 高实时性姿态定位, 高效地配合完成虚拟3D图像的合成工作.
1系统
本文所述机械定位式摄像机云台姿态定位系统可划分为3个层次, 即数据层、 特征层和决策层, 其中数据层由内嵌加持在摄像机及云台上的6个高精度传感器所测数据组成, 特征层由主控箱从6个传感器所测数据中采集并提取出所需要的特征数据组成, 决策层将特征层采集的数据经过融合、 转换、 浓缩等数据处理过程打包成Free-d格式后等待摄像机同步信号, 待接到同步信号触发命令后将数据发送至3D合成工作站已进行进一步的虚拟3D图像合成.
2传感器的安装
摄像机云台上加持有6个传感器, 其精度均能达到0.001°, 其中两个增量式光电传感器通过3D打印的齿轮啮合于摄像机镜头上, 用于测量ZOOM和FOCUS两个参数, 两个基于串口传输的绝对式光电编码传感器同轴安装于云台和云台底座主轴上用于测量云台和云台底座横摇Pan两个参数, 两个基于SSI传输协议的绝对式光电编码传感器安装于云台和摇臂上, 用于测量俯仰Tilt参数.
3数据采集系统设计
3.1系统结构及工作原理
3.1.1系统结构
数据采集系统由3部分构成: ① 以6路传感器和摄像机视频同步信号发生器为核心的原始信号部分; ② 以单片机和传感器信息采集模块为核心的数据采集与处理部分; ③ 以485芯片和3D图像合成工作站为核心的远距离数据传输与图像合成部分. 其中原始信号部分由内嵌有6路传感器的摄像机云台和摄像机同步信号发生器组成; 数据采集与处理部分由以单片机、 差分信号转TTL芯片以及串口芯片为核心的传感器采集模块组成; 数据传输与图像合成部分由以485芯片为核心的TTL转差分信号模块和3D图像合成工作站组成. 数据采集系统的总体结构如图 1 所示, 其中电源是由摄像机提供经过DC-DC转换后系统所需的各级电源; 交互模块包括开关、 零点触发、 选择同步信号以及指示灯.
3.1.2工作原理
安装于摄像机云台上的6路传感器将摄像机的焦点、 焦距以及云台的姿态信息转换成数字量信息, 随后以单片机为核心的数据采集与数据处理模块对传感器信息进行实时采集与数据处理, 待接到同步信号的指令后, 将摄像机云台姿态信息同步发送至3D合成工作站, 实现虚拟3D图像实时合成.

图 1 数据采集系统的总体结构框图Fig.1 Overall structure diagram of data acquisition system
3.2系统主要模块
3.2.1以单片机为核心的模块设计
单片机硬件电路包含: 单片机芯片选型、 与传感器采集模块通信、 复位电路、 电压转换电路以及LED驱动电路等. 系统选用的单片机芯片为STC15系列, 型号是STC15F2K60S2, 选用其的理由是:
1) 该芯片具有高运算速度, 其单时钟/机器周期是普通8051单片机的8到12倍而不用改变工作频率, 一个机器指令不到0.1 μs, 经试验其能在一帧数据内采集并处理云台姿态数据5次;
2) 该芯片具有两组高速异步串行通信端口(可同时使用), 可在5组管脚之间进行切换, 分时复用可当5组串口使用, 解决了与多路传感器采集和与3D工作站之间通讯占用多个串口问题;
3) 该芯片集成高精度内部R/C时钟与内部复位电路等模块, 缩小控制箱体积.
3.2.2传感器采集模块的设计及数据采集
系统选用的用于测量云台和云台底座横摇Pan的两个绝对式光电编码传感器, 其型号为: WN5J25-16 , 该传感器具有固定零点, 输出数据为18 b的格雷码、 无累计误差、 具有较强的抗干扰能力, 格雷码只是一种传输格式[3], 需要转换成二进制才能参与后续的数据处理, 其转换方式为:
格雷码:An-1An-2…A2A1A0
对应的二进制数:Bn-1Bn-2…B2B1B0
其中最高位保留:Bn-1=An-1
其他各位:Bi=Ai⊕Bi+1i=0,1,2,……,n-2[4]
该传感器分辨率为
该传感器输出信号如图 2 所示, 单片机通过串口通信模块对其仅进行原始数据采集, 串口通信模块如图 3 所示, 该模块在串口芯片与单片机之间增加了瞬变电压抑制二极管, 起到了静电保护与防浪涌的作用, 增加系统稳定性.
用于测量ZOOM和FOCUS的两个增量式光电传感器, 其型号为: RE22D01-01, 该传感器具有两路差分信号, 可进行远距离传输, 输出数据为两路相差半个周期的脉冲[5].
该传感器输出信号如图 4 所示, 由于该传感器输出信号两路差分信号, 而单片机为对地的TTL电平, 故需采用差分信号与TTL互转模块作为中介, 如图 5 所示, 其中T1_A与T1_B为输入的一路差分信号, 经过转换后输出TTL高低电平.
用于测量云台和摇臂俯仰的两路基于SSI传输协议的绝对式光电编码传感器其型号为: WSS-18B, 该传感器在SSI通信协议上采用差分信号新型数据传输, 其交互信号如图 6 所示, 其采集模块如图 7 所示, 图 7 中Clock_out是单片机为传感器提供的时序对应为图 6 中上面的波形, Data_IN是传感器接到时序后返回的数据信息对应图 6 中下面的波形, 该传感器数据格式为自然二进制码[6].
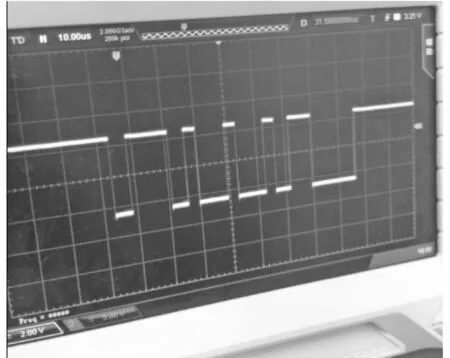
图 2 绝对式传感器信号波形图Fig.2 Absolute sensor signal waveform

图 3 绝对式传感器信号采集原理图Fig.3 Absolute sensor signal acquisition principle diagram

图 4 增量式传感器信号波形图 Fig.4 Incremental sensor output signal
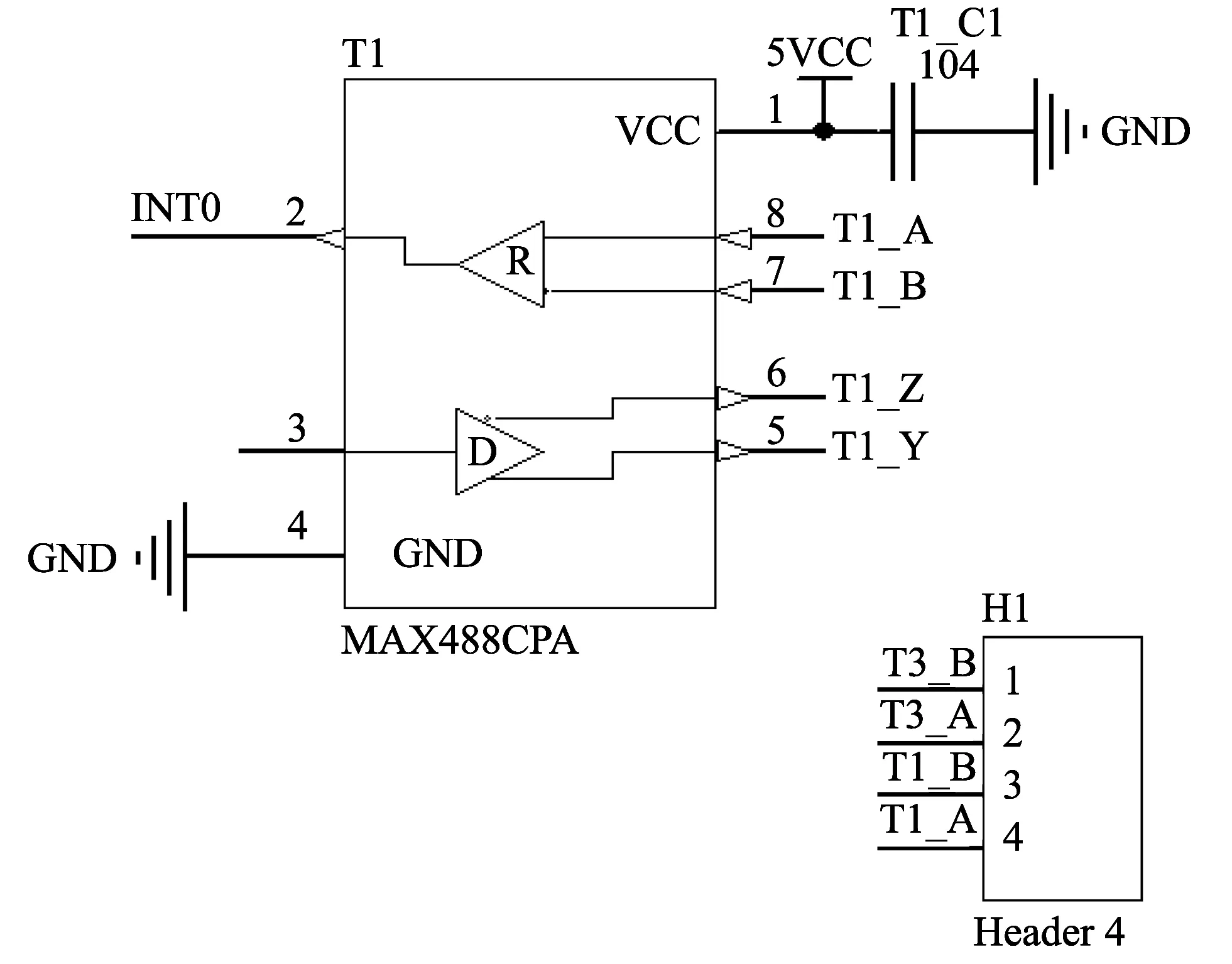
图 5 增量式传感器信号采集原理图Fig.5 Incremental sensor signal acquisition principle diagram

图 6 SSI传感器信号波形图Fig.6 SSI sensor signal waveform principle diagram

图 7 SSI传感器信号采集原理图Fig.7 SSI sensor signal acquisition principle diagram
3.2.3同步信号解析模块的设计
同步信号解析模块是以LM1981芯片为核心的模块(见图 8), 从复杂的视频信号中分离出同步信号(见图 9), 其周期20 ms(一帧), 当该模块解析出同步信号以后触发单片机发送标志位, 单片机检测到发送标志位以后通过串口同步发送数据至3D合成工作站.
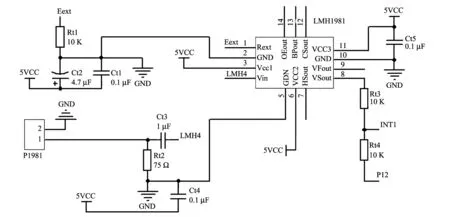
图 8 同步信号解析原理图 Fig.8 Synchronous signal analysis principle diagram

图 9 同步信号波形图Fig.9 Synchronous signal waveform
4开机绝对零点设定与校准
通常摄影师在拍摄之前会将摄像机调整姿态以对准目标物体, 需要对该姿态设为绝对零点, 相对于该零点姿态范围变动在±180°之间, 采用的3种传感器中的绝对式光电编码传感器具有绝对的位置信息, 所以需要对其进行数据处理, 程序如下:
if(Init2_angle<=180)
{
if(Read_angle>=(Init2_angle+180))
{
Read_angle=Read_angle-(360+Init2_angle);
}
else
{
Read_angle=Read_angle-Init2_angle;
}
}
else
{
if(Read_angle<=(Init2_angle-180))
{
Read_angle=360-Init2_angle+Read_angle;
}
else
{
Read_angle=Read_angle-Init2_angle;
}
}
5系统测试与结论
图 10 为安装了传感器的摄像机云台系统测试现场, 系统上电后, 3D合成工作站收到的数据格式如图 11 所示, 该系统数据传输速率为20 ms, 实验验证, 其精度能达到0.001°, 可适用于焦距50 m的室外场景拍摄,其合成效果如图 12 所示.

图 10 测试现场Fig.10 Test site
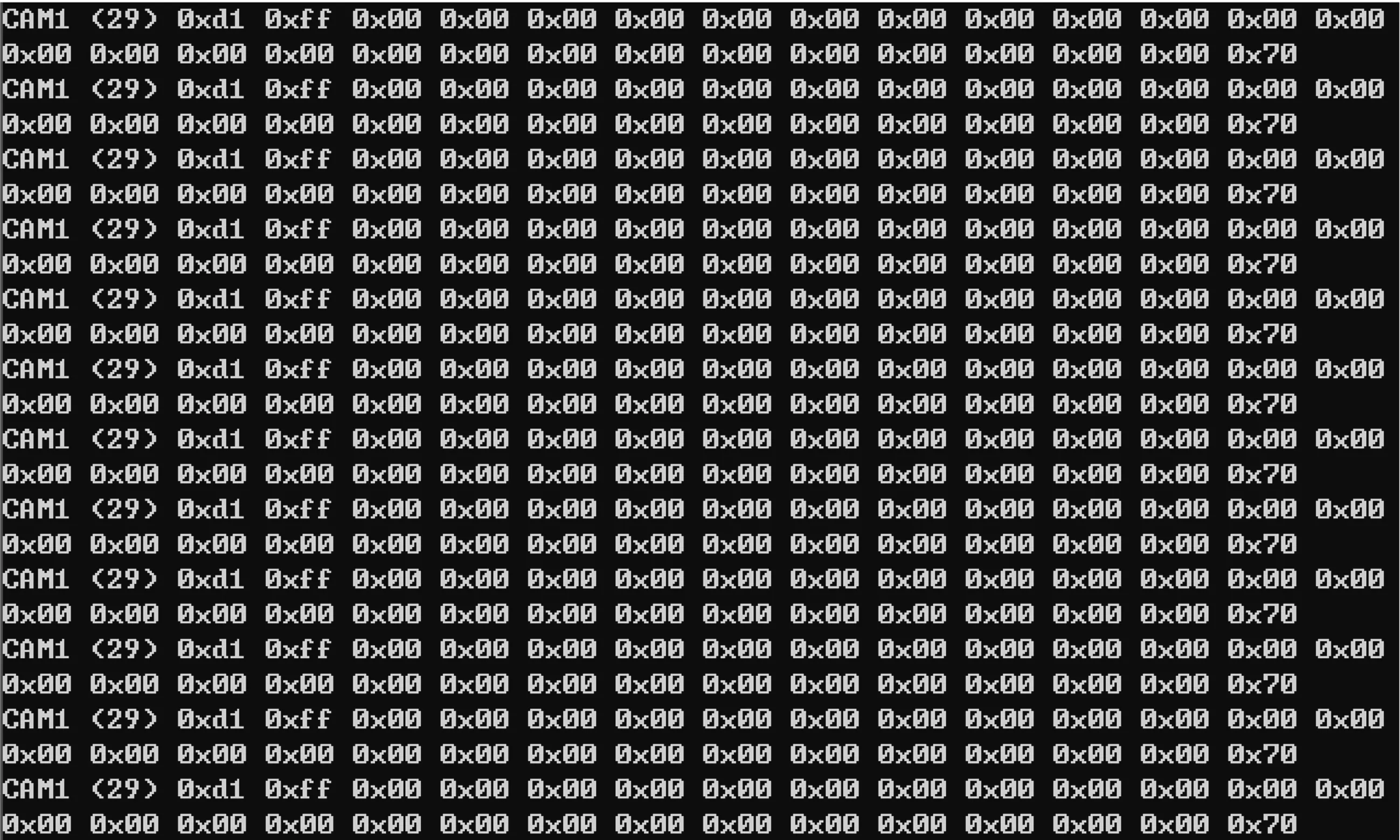
图 11 数据收发格式Fig.11 Data sending and receiving format

图 12 室外合成效果Fig.12 Outdoor synthetic effect
参考文献:
[1]王卫军, 杨晓宏. 虚拟演播室技术及其在电视教材制作中的应用[J]. 电化教育研究, 2002(1): 48-50.
Wang Weijun, Yang Xiaohong.Virtual studio technology and its application in the production of TV teaching material[J]. Research on Electrochemical Education, 2002(1): 48-50. (in Chinese)
[2]吴汇平. 浅谈虚拟演播室技术[J]. 电视工程, 2000(1): 4-7.
Wu Huiping. Talking about virtual studio technology [J]. Television Engineering, 2000(1): 4-7. (in Chinese)
[3]刘丰文. 高精度绝对式编码器的信号处理[J]. 光电工程, 1999(2): 64-68.
Liu Fengwen. Signal processing of high precision absolute encoder[J]. Optoelectronic Engineering, 1999(2): 64-68. (in Chinese)
[4]李绍新. 动态光散射测量粒径分布的格雷码编码遗传算法反演运算[J]. 计算物理, 2008(3): 323-329.
Li Shaoxin. Inversion of particle size distribution from dynamic light scattering data with gray-code genetic algorithm[J]. Computational Physics, 2008(3): 323-329. (in Chinese)
[5]王兴, 贾晓虎, 郝春丽. 基于增量式光电编码器位移传感器研究[J]. 电子设计工程, 2012(5): 155-158.
Wang Xing, Jia Xiaohu, Hao Chunli. Research on incremental photoelectric encoder displacement sensor[J]. Electronic Design Engineering, 2012(5): 155-158. (in Chinese)
[6]靳红涛, 赵勇进, 陈朝基, 等. 一种SSI接口光电编码器数据并行采集设计方法[J]. 电子技术, 2008(5): 23-25.
Jin Hongtao, Zhao Yongjin, Chen Chaoji, et al. A data parallel acquisition design method for SSI interface optical encoder[J]. Electronic Technology, 2008(5): 23-25. (in Chinese)
Study on Test Method of High Precision Positioning of Video Camera Rocker System
JIA Yunfei1, CHEN Yang1, BIAN Peng2
(1. School of Mechanical Engineering, Nanjing University of Science and Technology, Nanjing 210094, China;2. Northern Huaan Industrial Group Co., Ltd., Qiqihaer 161000, China)
Abstract:This study focused on the high precision positioning of video camera rocker system,the process of virtual image synthesis could be done by controlling the video camera rocker motion.This system installed plurality of sensors to the video camera rocker system to feel the video camera attitude changes.The sensor data acquisition and data processing are carried out by using the master control module which is the core of the high speed control chip.Then the synchronization signal was analysed and the video camera rocker position information was sent to 3D synthesis workstation synchronously, and finally the 3D image synthesis was finished.The test results show that the system can collect the sensor data with high speed and accuracy,and synchronous effect is good. It also has high reliability and strong stability, meet the needs of the long-term work.
Key words:virtual 3D; camera rocker; high precision positioning; 3-D kinematic model
文章编号:1671-7449(2016)03-0208-07
收稿日期:2015-07-09
作者简介:贾云飞(1977-), 男, 副研究员, 博士生, 主要从事精密机械、 测试测量等方面的研究.
中图分类号:TP13
文献标识码:A
doi:10.3969/j.issn.1671-7449.2016.03.005
