一种用于农作物状态监测的无人飞行平台方案设计
2016-06-27李金泽莫小明董琛琦李海军
李金泽, 莫小明, 董琛琦, 李海军
(1. 广西大学 物理科学与工程技术学院, 广西 南宁 530004; 2. 海军航空工程学院, 山东 烟台 264001)
一种用于农作物状态监测的无人飞行平台方案设计
李金泽1, 莫小明1, 董琛琦1, 李海军2
(1. 广西大学 物理科学与工程技术学院, 广西 南宁 530004; 2. 海军航空工程学院, 山东 烟台 264001)
摘要:根据农作物状态监测任务需要, 本文提出了运用无人飞行平台搭载光谱成像设备进行农作物状态监测的方案. 通过对多种类型无人飞行器技术参数比较分析, 提出了一种基于四旋翼无人飞行平台的成像光谱回传监测方案. 分析了四旋翼飞行器飞行控制及稳定方法, 根据任务载荷需求、 结构强度要求, 研究了无人飞行平台起飞重量分析及分配方法, 给出了动力系统、 能源系统需求估算方法. 在一定安全系数和余度要求下, 给出了四旋翼飞行器组件选型方法, 提出了一种装机方案, 并进行了起飞重量、 飞行时间等指标的验证. 该平台能够实现光谱图像的实时记录并回传, 可满足农作物大面积动态监测要求.
关键词:农作物监测; 四旋翼无人飞行平台; 光谱成像
0引言
农作物状态监测包括了对农作物覆盖率、 田间植株长势、 病虫害、 旱涝等情况的信息获取, 监测数据可以用于施肥、 灌溉、 排涝、 病虫害防治等方案的制定, 也可用于农作物单产的估算. 这样的信息对于我国这样的农业大国来说是及时了解农情、 制定农业战略规划所必需的, 传统的农作物信息的获取方法存在劳动强度大、 受人为主观因素影响大等缺陷, 限制了农作物信息的实时性和准确性. 航空航天遥感技术可以快速、 大范围地获取农田信息, 但存在平台成本高、 采样精度低、 实时性不强等缺点. 本文提出了一种运用四旋翼飞行器作为农田信息采样的低空平台设计方案, 通过在此平台上安装图像采集装置, 利用成像光谱技术同时获得农作物的图像以及光谱信息, 实现对农作物状态信息的快速、 无损检测, 是一种低成本、 快速、 准确获取农作物状态信息的有效手段, 尤其是对于局部农田信息获取更有机动灵活、 气象条件影响小、 无需考虑航空管制等的优点.
1飞行平台类型选取
局部农作物状态监测需要的飞行平台飞行高度要求在0~100m即可, 且大部分的监测科目要求在30~50m空域飞行. 根据广西壮族自治区山区多, 交通运输不方便的特点, 对无人机平台的要求是: ① 重量小; ② 能够垂直起降; ③ 能够自由悬停; ④ 监测装置更换方便. 对当今主要的能够垂直起降的无人飞行器性能指标进行一一对比, 如表 1 所示, 表 1 中的性能数据1~4表示了性能等级, 其中1最差, 4最好[1].

表 1 垂直起降飞行平台性能比较
从表 1 可以看出, 四旋翼飞行平台总分最高, 四旋翼飞行器机械结构简单, 生成升力、 侧向力的动力结构及控制方式简单, 其在低速飞行以及静态性等方面有比较优异的特性, 符合农田信息监测飞行平台的要求, 本文方案选取四旋翼无人飞行器作为飞行平台.
2四旋翼飞行平台设计
2.1国内外四旋翼研究进展
目前, 四旋翼飞行器是国内外无人飞行平台研究的热点, 成熟产品型号也较多. 国外开展四旋翼研究比较早, 如加拿大雷克海德大学(LakeheadUniversity)的Tayebi证明了四旋翼结构可以稳定飞行[2]. 目前, 有关四旋翼飞行器的理论及实践研究主要集中在基于惯性导航系统的自主飞行、 基于视觉系统的自主飞行和自主飞行器系统等3个方面. 美国Draganfly公司的同名四旋翼无人机是一款非常成熟的产品, 其中X4型产品使用碳纤维骨架, 重680g, 飞行时间约30min, 目前广泛应用于各大高校的四旋翼无人机研究中, 比如, 斯坦福大学在STARMAC项目研究中, 就使用Draganflyer来研究多架四旋翼飞行协同阵列飞行[3,4]; 澳大利亚国立大学研制的X-4型四旋翼无人机一大特点是采用旋翼下至的结构布置, 采用铝制框架, 重约4kg, 飞行动力学特性更加优异.
国内高校与研究院所对四旋翼飞行器的总体结构、 控制方法及控制率等方面的研究相对集中, 有代表的研究单位包括:国防科技大学、 北京科技大学、 南京航空航天大学和哈尔滨工业大学等, 研究方向主要内容是针对飞行器本身动力学模型建立及实现控制算法, 对于姿态控制与自主飞行提出了大量的算法与理论根据. 近年来国内四旋翼飞行器产品也层出不穷, 大疆公司的无人机产品在世界市场上也占有了一定的份额, 且在军事领域的应用也不断扩展. 国内市场不断出现各种各样成熟的四旋翼器商品, 如XAircraft公司推出的搭载有13个传感器的X650G, 搭载的传感器分别用来检测飞行姿态、 高度、 位置、 方向、 温度及功耗[3,4].
2.2方案设计
2.2.1四旋翼的飞行控制方法分析
1) 自身扭转力矩的消除方法
直升机由于螺旋桨的旋转运动, 造成在直升机前进方向两侧气流速度的差异, 从而形成升力的不对称, 造成机体的自转. 传统的直升机为了平衡扭转力矩, 需要在直升机的尾部加尾桨来实现, 四旋翼无人飞行器可以通过控制对角螺旋桨的旋转方向来自行抵消扭转力矩, 采用4个旋翼中两个顺时针旋转, 另外两个逆时针旋转的方法来实现, 且对角线上的旋翼转速相同. 当4个旋翼的旋转速度相同时, 扭转力矩达到平衡状态, 旋翼机不会发生转动.
2) 机动飞行控制方法
四旋翼无人机的机动飞行是采用倾斜转弯控制方法, 通过增大(减小)一对同方向旋转旋翼的旋转速度和减小(增大)另一对旋翼的旋转速度, 来实现机体的偏航, 从而使升力在其倾斜方向上产生分力, 改变无人机的运动方向. 图 2 所示是机体向右倾斜, 产生向右飞行的法向控制力, 无人机向右机动的示意图, 假如4个旋翼在升力面产生的升力的合力为F, 其在x方向的投影为
(1)
Fx即是无人机向右机动飞行的控制力. 当然, 垂直方向机动, 机体不需倾斜, 向前、 向后的运动控制方法与向左、 向右飞行的控制方法是一样的, 只不过是控制机体做俯仰姿态变化.

图 1 四旋翼无人飞行器模型示意图Fig.1 Sketch map of four-rotor aerial vehicle model

图 2 四旋翼无人飞行器偏航运动控制方法Fig.2 Yaw motion control method of four-rotor aerial vehicle
2.2.2起飞重量分析
无人机质量包扩机械结构质量、 动力系统质量和载荷质量 , 其中电源、 电机及螺旋桨统称为动力系统. 结构质量是指机身质量, 包括电机安装机架和载荷安装框架的质量; 农作物状态监测用无人飞行平台载荷主要包括任务载荷和平台电子装置两大部分, 任务载荷为即成像光谱装置, 机上电子装置包括控制装置、 数传装置、 电调等用于飞行控制以及数据传输用的机载装置.
设整机质量用Q来表示, 结构质量为Qj, 动力系统质量为Qt, 载荷质量为Qz, 则
(2)
动力系统效率主要是通过电机输出效率和螺旋桨输出效率综合反映, 电机输出效率决定于电机参数和电机工作状态, 选择合适的电机, 各飞行状态下的电机效率基本能达到80%以上[5,6], 螺旋桨输出效率也可达80%以上[7,8].

(3)
式中:Q为无人机总重量; v为飞行速度; g为重力加速度; k为升阻比; ηm为电机输出效率; ηB为螺旋桨输出效率.
电机质量的估算可根据所需功率进行[9,10]
(4)
按照无人机一次任务飞行t小时计算, 所需能量为
(5)
由此, 可以计算出储存电能的电池重量为
(6)
式中:q为电池储能密度.
2.2.3重量分配及选型方案设计
1) 重量分配方法
统计现有满足0~10m高度范围飞行, 能够完成普通航拍任务的成品四旋翼无人机整机重量在1.5~5kg范围内. 预估农作物状态监测用无人机平台整机重量为2kg, 爬升飞行平均速度假定为10m/s.
参照目前相关技术领域的成熟技术水平和产品的参数指标, 飞行器平台的参数及材料器件可达到的性能参数见表 2[11].

表 2 飞行器平台及材料器件的参数
按照式(3), 可计算全机电功率需求
该功率按照4只电机平均, 单只电机功率需求为76.5W, 按照式(3), 可计算出单只电机质量
Qm=(0.263 4P+18.3)×10-3=(0.263 4×76.5+18.3)×10-3=0.038 kg.
假定单次任务飞行时间限定在0.5h之内, 该任务期间不更换新的电池, 则飞行所需要的能量为
Wb=Pt=306×0.5=153 W.
储存电能的电池重量为
2) 选型方案
根据农作物状态监测航拍任务要求, 任务载荷选择图像实时回传式摄像头, 大部分型号重量在100g左右(如MOBIUS808, 分辨率为1 080dpi, 重量为83g); 平台电子装置电路板按照100g计算.
结构件选择碳纤维材料产品, 强度高、 质量轻, 根据载荷质量, 选择一型重量为680g的机架.
则整机重量
Q=Qj+Qt+Qz=0.68+(0.038×4+0.612)+0.1+0.1=1.644 kg.
整机重量没有超过估算2kg的方案, 载荷余度较大, 方案是可行的.
3验证分析
根据上述分析, 选择配件, 制定组机方案如表 3 所示.
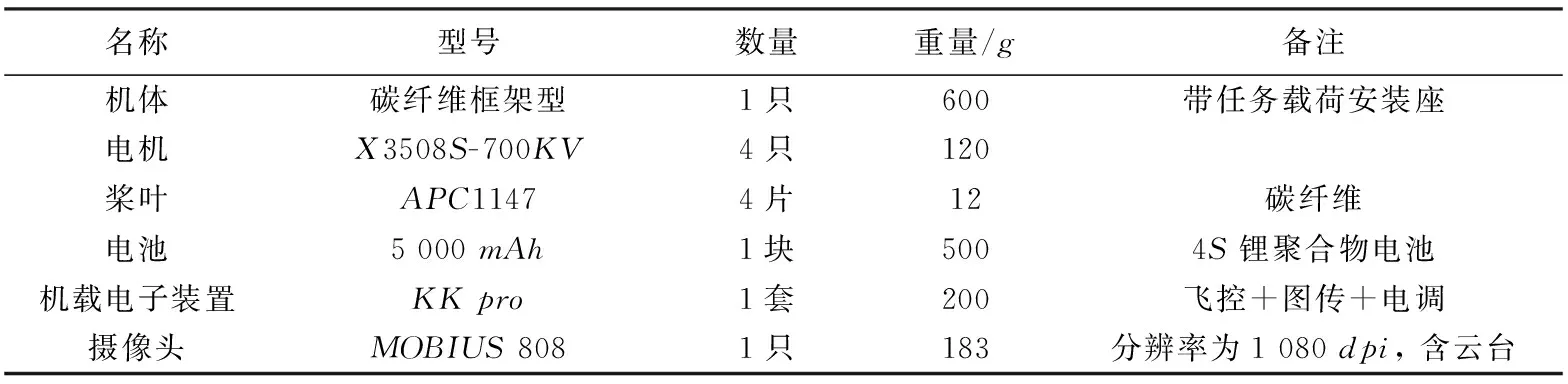
表 3 组机方案表
本装机方案整机重量为1 615g, 符合设计指标要求. 所选电机5A电流时单只可产生600g升力, 4只电机可产生2 400g升力, 是整机重量的1.5倍, 起飞重量指标符合要求.
成品5 000mAh电池容量显小, 按照3S电池平均工作电压12V, 3A电流计算, 其飞行时间大约在0.28h亦即16.8min, 但是电池容量增加会使得电池重量增加. 应用本方案装机, 用于农作物的状态监测可多配备几块成品电池, 以满足任务需要.
参考文献:
[1]李继宇, 张铁民, 廖懿华, 等. 农田信息采样方式及飞行器平台设计[J]. 振动、 测试与诊断, 2013, 33(3): 466-471.
LiJiyu,ZhangTiemin,LiaoYihua,etal.Fieldinformationsamplingandaircraftplatformsdesign[J].JournalofVibration,Measurement&.Diagnosis, 2013, 33(3): 466-471. (inChinese)
[2]SureshKK,KahnAD,YavrucukI.GTMARSflightcontrolsandcomputerarchitecture[M].Atlanta:GeorgiaInstituteofTechnology, 2000.
[3]RenYanyun,HuangQiang,LiLong.ThedesignofT-4microUaVtest-bedbasedonMemssensors[C].Proceedingsofthe1stIEEEInternationalConferenceonNano/MicroEngineeredandMolecularSystems.Zhuhai,China:IEEEConferencePublications, 2006: 1523-1526.
[4]李航. 小型四旋翼飞行器实时控制系统研究[D]. 大连:大连理工大学, 2010.
[5]TraubLW.Rangeandenduranceestimatesforbatterypoweredaircraft[J].JournalofAircraft, 2011, 48(2): 703-707.
[6]JonesJL,FlynnAM.Mobilerobots-inspirationtoimplementation[M].Wellesley:AKPeters,Ltd, 1999.
[7]刘沛清. 空气螺旋桨理论及其应用[M]. 北京: 北京航空航天大学出版社, 2006.
[8]王适存. 直升机空气动力学[M]. 南京: 航空专业教材编审组, 1985.
[9]吴超, 胡峪, 王刚. 小型电动力四旋翼坐地起降无人机设计研究[J]. 飞行力学, 2014, 32(3): 205-208.
WuChao,HuYu,WangGang.Researchonsmallelectric-poweredquad-rotortail-sitterUAVdesign[J].Flightdynamics, 2014, 32(3): 205-208. (inChinese)
[10]刘志军. 一种自主飞行四旋翼系统设计与实现[D]. 西安:西安科技大学, 2014.
[11]张秦岭, 黄建, 刘晓倩. 长航时太阳能无人机总体设计方法和分析[J].空军工程大学学报(自然科学版), 2004, 15(2): 12-15.
ZhangQinling,HuangJian,LiuXiaoqian.GeneraldesignmethodandanalysisoflongendurancesolarpoweredUAV[J].JournalofAirForceEngineeringUniversity(NaturalScienceEdition), 2004, 15(2): 12-15. (inChinese)
SchemeofaUnmannedFlightPlatformDesignedfor
CropsConditionsMonitoring
LIJinze1,MOXiaoming1,DONGChenqi1,LIHaijun2
(1.SchoolofPhysicalScienceandEngineering,GuangxiUniversity,Nanning530004,China;
2.Dept.ofArmamentScienceandTechnology,NavalAeronauticalandAstronauticalUniversity,Yantai264001,China)
Abstract:According to the needs of crops conditions monitoring,the crops monitoring program using unmanned flight platform with a spectral imaging device was proposed. Utilizing a comparative analysis on multiple types aerial vehicle, an imaging spectrum return monitoring scheme , based on four-rotor unmanned aerial vehicle, was put forward. The control and stability methods of four-rotor unmanned aerial vehicle were analyzed. According to the demand of task loading and structural strength, the analyzing and distributing approaches of take-off weight were researched, and the estimation methods for the needs of power and energy system was given. Based on safety factor and redundancy requirement, the component selection scheme was given. One installed program was proposed, and the take-off weight and flying time were tested and verified. Spectral image could be recorded and returned in real time using this platform, and the requirement of dynamic monitoring for large crop areas could be satisfied.
Key words:crops monitor; four-rotor unmanned aerial vehicle; spectral imaging
文章编号:1671-7449(2016)03-0272-05
收稿日期:2015-07-21
基金项目:广西壮族西自治区大学生创新计划项目基金支援(201510593114)
作者简介:李金泽(1996-), 男, 主要从事电子科学与技术研究.
通信作者:李海军(1966-), 男, 教授, 主要从事航空导弹测试与故障诊断研究.
中图分类号:V275+.1
文献标识码:A
doi:10.3969/j.issn.1671-7449.2016.03.016
