颈椎C2~7三维有限元模型的建立与最优角度牵引仿真研究>*
2016-06-17刘治华许伟超张新民刘博见
刘治华,许伟超,张新民,刘博见
1)郑州大学机械工程学院 郑州 450001 2)郑州飞龙医疗设备有限公司 郑州 450001
颈椎C2~7三维有限元模型的建立与最优角度牵引仿真研究>*
刘治华1)△,许伟超1),张新民2),刘博见1)
1)郑州大学机械工程学院 郑州 4500012)郑州飞龙医疗设备有限公司 郑州 450001
△男,1971年7月生,博士,副教授,研究方向:生物力学、机电系统设计与控制,E-mail:liuzhihua@zzu.edu.cn
关键词颈椎;有限元模型;逆向工程;最优角度
摘要目的:建立颈椎C2~7三维有限元模型,探讨不同角度牵引对颈椎间盘的影响。方法:对一名30岁健康成年男性志愿者的颈椎进行CT扫描成像,应用Mimics 10.01、Geomagic Studio逆向工程软件生成颈椎间盘并建立实体CAD模型,然后导入Ansys Workbench 15.0软件得到颈椎C2~7三维有限元模型并进行有效性验证,在所建模型上添加载荷及约束,模拟人体平躺时0~20°变角度牵引,得出牵引治疗中各段颈椎间盘的最优牵引角度。结果:成功建立了C2~7三维有限元模型。同一大小牵引力作用下,颈椎间盘C2~3、C3~4、C4~5、C5~6、C6~7的最优牵引角度分别为2°、4°、8°、13°、17°。结论:建立了有效的颈椎C2~7三维有限元模型。
颈椎是人体连接头颅和胸腰段脊柱的重要结构,是脊柱中活动量最大、运动频率最高的节段[1]。颈椎病是临床上的常见病,随着社会竞争的日益激烈,工作学习压力的进一步增大,其发病率也呈逐年递增之势。常见的颈椎生物力学研究分为两类:计算机模拟(采用有限元分析的方法)和实验生物力学研究(对真实的颈椎结构进行力学测试)。有限元分析的方法具有实验时间短、费用少、力学性能测试全面及可重复实验等优点,1972年Brekelmans等[2]首次将有限元的方法应用于生物力学领域,发展到今天有限元分析法已经取得了长足发展。该文基于CT图片建立了精确度高、便于分析的颈椎C2~7三维有限元模型,并对模型的有效性进行了验证,采用有限元的方法得出同一牵引力下,牵引角度变化对各节段颈椎间盘的影响规律,最终得到各段椎间盘的最优牵引角度,为新型颈椎牵引治疗系统的开发提供依据。
1材料与方法
1.1数据来源无颈椎病史健康男性志愿者一名,30岁,汉族,身高175 cm,体重68 kg,采用美国GE公司生产的64排螺旋CT扫描机对其颈椎进行连续扫描,共获取345层CT片,层厚0.483 mm,扫描数据以DICOM格式直接存储。该志愿者的正、侧位颈椎X线片见图1。
图1 正(A)、侧(B)位颈椎X线片
1.2试验设备计算机硬件Intel(R) Core(TM) i3-2120 CPU 3.30 GHz,6 G内存,NVIDIA GeForce GT620显卡,1 G显存,Windows 7 操作系统。医学图像处理软件Mimics 10.01(Materialise公司,比利时),逆向工程软件Geomagic Studio(Geomagic公司,美国),有限元分析软件 Ansys Workbench 15.0(Ansys公司,美国)。
1.3颈椎C2~7三维有限元模型的建立及验证
1.3.1颈椎C2~7三维有限元模型的建立将DICOM格式的CT图片数据导入Mimics 10.01软件,利用软件自带的阈值分割、区域增长、选择性编辑等功能,将各节段椎骨连接部分手动分离并进行空洞填补,最后将编辑好的蒙罩进行3D转化,生成颈椎椎骨面网格模型,再将生成的数据逐个导入Mimics软件自带的网格优化工具Magics中进行优化,见图2。将以上生成的椎骨模型导入Geomagic Studio软件,利用搭桥的方法在两段椎骨间逆向生成颈椎间盘[3-4],利用Geomagic Studio中NURBS曲面功能将上述颈椎椎骨椎间盘模型逐个实体化,最终构建成实体CAD模型。在有限元分析软件Ansys Workbench 15.0中将导入的以上椎骨部分分为皮质骨和松质骨,椎间盘分为纤维环和髓核,根据颈椎的实体解剖结构信息确定韧带的主要分布位置,由Mimics软件确定韧带在颈椎模型上的具体分布坐标,利用Ansys Workbench 15.0自带的link180单元来模拟韧带只承受拉力不承受压力和剪切力的特性。查找文献[5-8],对所建模型赋予单元类型和材料属性,见表1。定义接触。
A:优化前;B:优化后。图2 颈椎椎骨面网格模型
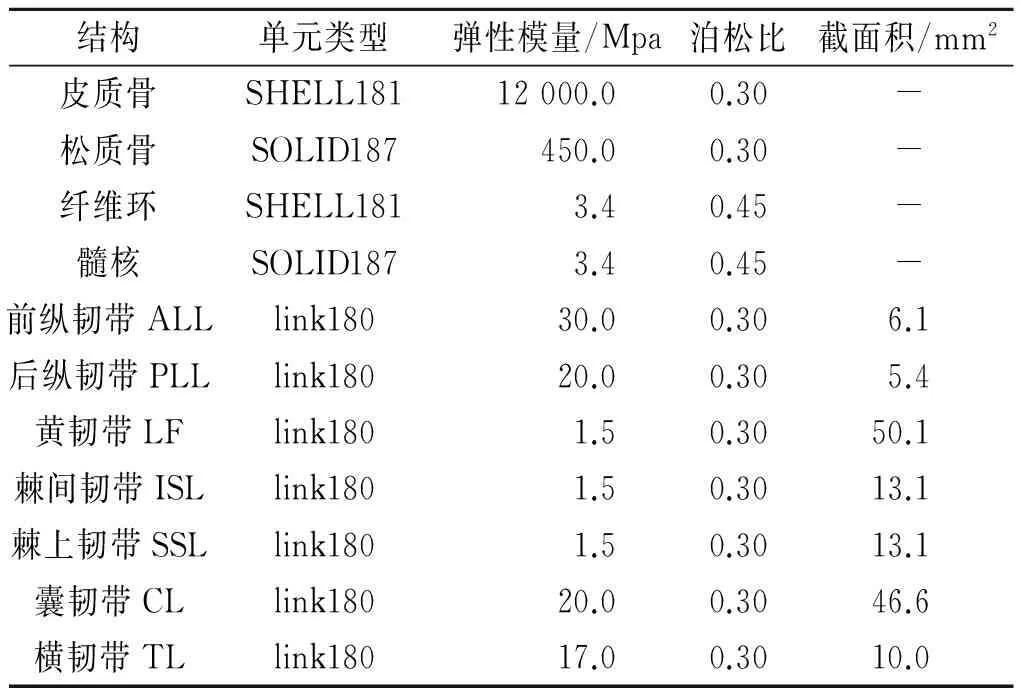
表1 颈椎C2~7有限元模型的单元类型和材料属性
1.3.2颈椎C2~7三维有限元模型的验证[9]颈椎有限元模型的验证采用对比验证的方法,应用文献[10]中的加载方式与边界条件,即在颈椎C7椎骨下表面施加全自由度约束限制,C2椎骨上表面逐步施加1.5 Nm的转矩,来模拟人体颈椎的侧弯、屈伸、轴向旋转基本运动,将仿真结果数据与相关文献[10-12]数据对比,验证模型在相同载荷及边界条件下的有效性。为了保证韧带与椎骨、椎间盘与椎骨接触面在仿真模拟过程中始终稳定连接,避免模型牵引时产生相对位移导致仿真失效,将椎间盘与椎骨、韧带与椎骨接触面均定义绑定接触[13-15]。椎间盘是椎体间的主要连接结构,通过总位移云图和等效应力云图也可以看出椎间盘在人体颈部基本运动中起着关键的作用,作者通过在有限元分析软件中建立局部坐标系,利用Ansys Workbench 15.0软件自带的指针与数据输出功能,对各节段椎间盘总位移、等效应力作均值处理,整理数据得到C2~3、C3~4、C4~5、C5~6、C6~7的运动范围,与相关文献[10-12]比较。
1.3.3最优牵引角度仿真研究牵引角度范围的确定:李晶等[16]认为最大应力的位置与牵引角度有关,牵引角度较小时,最大应力位置出现在颈椎上段,随着牵引角度增大,最大应力的位置逐渐下移。高楚荣等[17]认为前倾超过30°时,颈椎牵引向上的作用力减少,水平方向力增加,难以维持平衡;只有在15°~20°前倾位牵引时,牵引力与颈椎运动轴心一致,符合力学要求,治疗效果最佳,因此该研究选定牵引角度范围为0~20°。牵引力大小确定:姜瑛等[18]认为,牵引力为患者体重的15%~20%范围内颈椎的拉伸量达到最大值,治疗效果最佳。该研究志愿者体重68 kg,因此对模型施加约100 N的牵引力模拟颈椎牵引治疗。对所建颈椎有限元模型施加以上载荷,C7椎骨下表面全自由度约束,进行0~20°变角度仿真求解并进行数据处理。
2结果
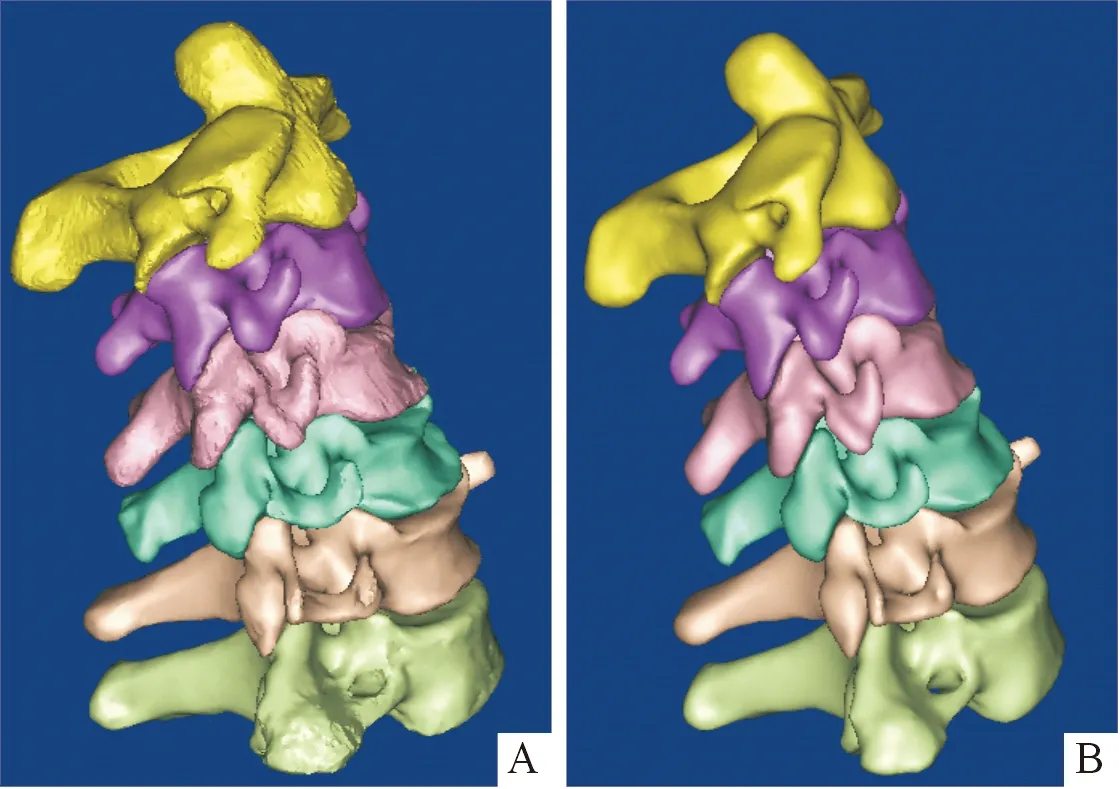
2.1颈椎C2~7三维有限元模型的建立最终所建颈椎C2~7三维有限元模型共有98 257个节点,96 549个单元,高度模拟了颈椎结构与材料特性,所建颈椎C2~7实体CAD模型及三维有限元模型见图3。
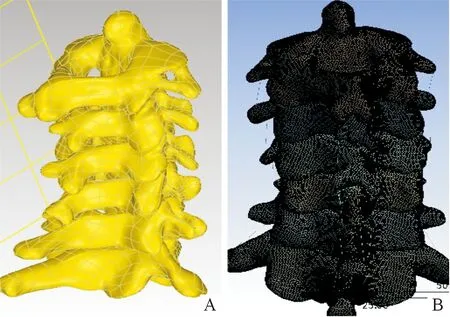
图3 颈椎C2~7实体CAD模型(A)及三维有限元模型(B)
2.2颈椎C2~7三维有限元模型的验证见图4。通过总位移图可以看出,颈椎C2~7模型的下颈椎部分活动范围较小,而上颈椎部分活动范围较大,椎间盘的总位移由上颈椎往下依次减小,符合力学规律;通过等效应力云图可以看出颈椎C2~7各节段在此约束及载荷条件下的应力值均较小,对比各节段的椎间盘的等效应力云图可以得到,相同的载荷及约束条件下,轴向旋转状态下的等效应力值大于侧弯状态。
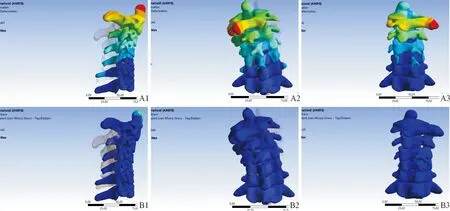
图4 屈伸(1)、侧弯(2)、轴向旋转(3)三种基本运动时颈椎C2~7模型总位移云图(A)和等效应力云图(B)
该文的得到的C2~3、C3~4、C4~5、C5~6和C6~7的运动范围与文献[10-12]比较的结果见表2~4。
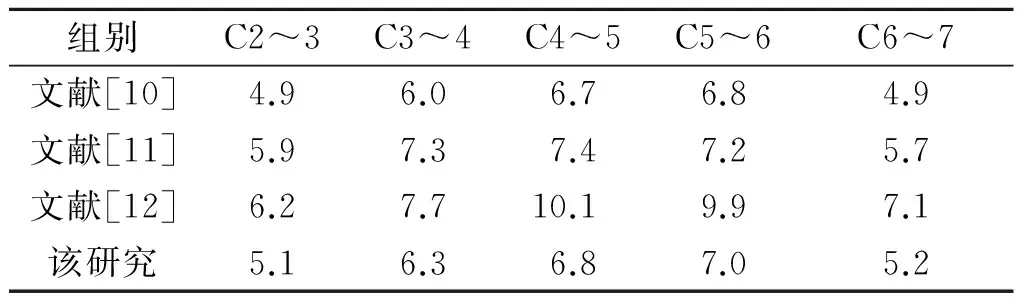
表2 屈伸状态下各节段椎间盘运动范围比较 °
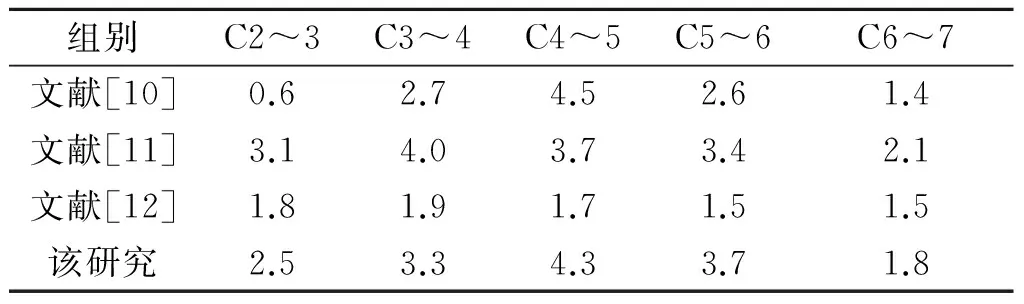
表3 侧弯状态下各节段椎间盘运动范围比较 °
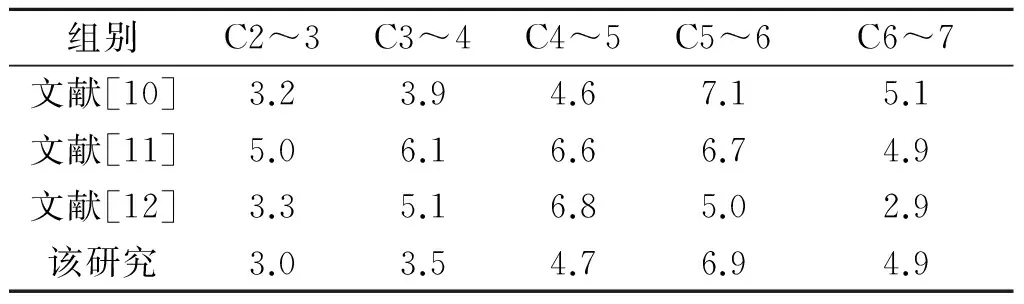
表4 轴向旋转状态下各节段椎间盘运动范围比较 °
2.3最优牵引角度仿真研究不同角度下各节段颈椎间盘厚度变化见图5。可以看出,牵引力大小不变,随着牵引角度的增大,各节段椎间盘也发生相应变化,当牵引角度分别为2°、4°、8°、13°、17°时,椎间盘C2~3、C3~4、C4~5、C5~6、C6~7伸长量达到最大值,分别为1.061、1.031、0.992、0.956、0.886 mm。2°牵引下总位移云图、等效应变图和等效应力云图见图6,可以看出随着牵引角度的变化,总位移的变化主要集中于上颈椎部分,椎间盘等效应变高于椎骨部分,等效应力也随着牵引角度的增大开始从上颈椎转移至下颈椎部分,其他角度云图与此类似。角度牵引可以增大椎间隙和椎间孔,使突出的颈椎间盘回纳[19],减轻对神经根、脊髓和椎动脉的压迫,从而达到治愈的目的,椎间盘C2~3、C3~4、C4~5、C5~6、C6~7最优牵引角度分别为2°、4°、8°、13°、17°。
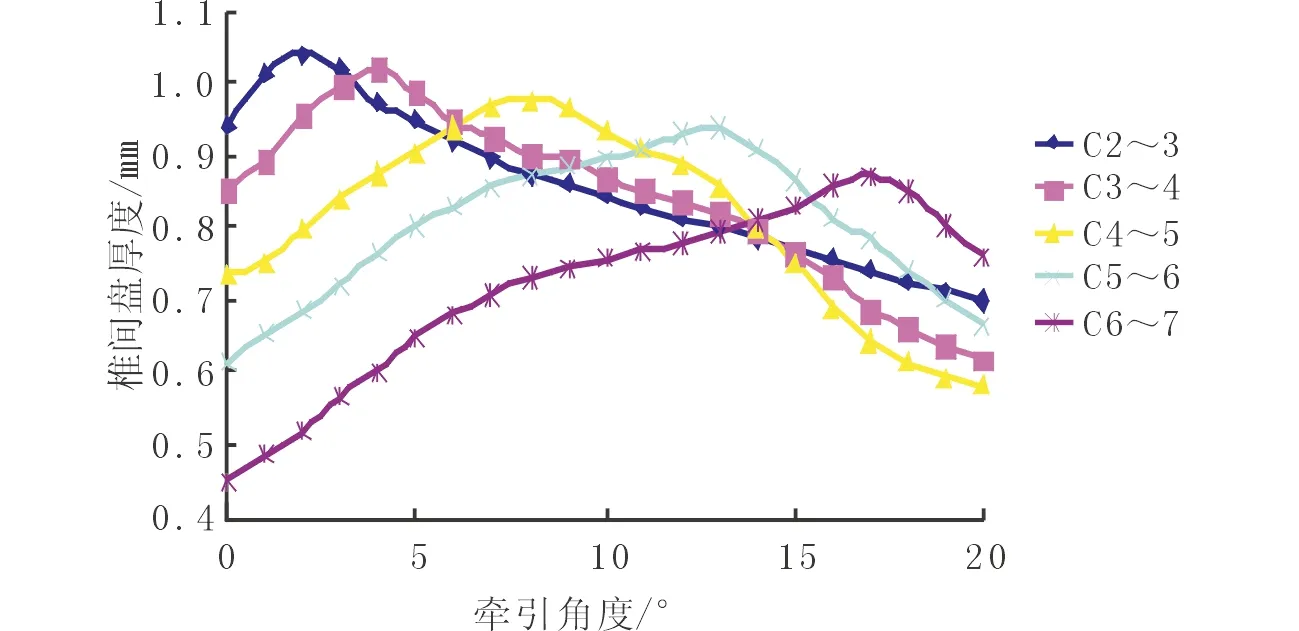
图5 不同角度下各节段颈椎间盘厚度变化图
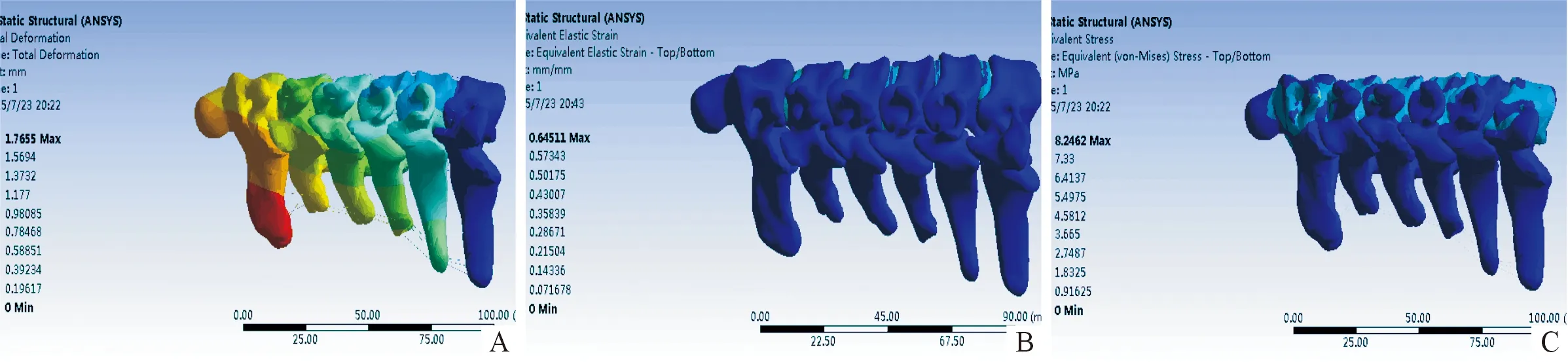
图6 2°牵引下颈椎C2~7模型总位移云图(A)、等效应变图(B)和等效应力云图(C)
3讨论
有限元建模的方法已经在脊柱生物力学特性研究上被广泛应用,但是也存在着影响所建模型质量因素多、颈椎解剖结构复杂、生物力学特性研究不理想等问题。脊柱有限元建模过程中,椎间盘模型的建立是一项难点,该研究利用逆向工程的方法生成椎间盘,在一定程度上保证了所建立的椎间盘与椎骨紧密贴合。韧带部分在生理结构上有着只承受拉力不承受压和剪切的特性,该研究应用软件自带的单元很好地模拟出这一特性,保证了模型的有效性。该研究结果显示,作者所建的颈椎C2~7三维有限元模型仿真得到的屈伸、侧弯、轴向旋转运动范围与已有文献[10-12]一致,验证了该有限元模型的有效性。但由于颈椎结构较为复杂,作者并未建立肌肉、关节等组织模型,而且对颈椎材料的定义也仅是参考文献资料数据简化为线弹性材料,实际上颈椎大部分结构材料为非匀质、各向异性的黏弹性材料,在单元划分、节点选择上很多跟外部因素有关,因此具有一定的局限性。成角度牵引时力可以分为轴向与法向两个方向,通过轴向力的作用可以拉大椎间隙,增大椎间孔,解除神经根的压迫,对颈椎病达到治愈的目的,但是最终治疗效果还与患者个人身体素质、外部环境因素等有很大关系,因此治疗时宜结合患者的患病类型、体质等因素,指定个性化的治疗方案以达到最佳治疗效果。该研究结果显示,牵引力为100 N,牵引角度分别为2°、4°、8°、13°和17°时,颈椎C2~3、C3~4、C4~5、C5~6、C6~7椎间盘伸长量达最大值。
综上所述,该研究基于CT图像建立了结构准确的人体颈椎C2~7三维有限元模型,采用有限元分析法模拟颈椎成角度牵引,最终得到了颈椎牵引的最优角度,仿真结果显示,颈椎椎间盘C2~3、C3~4、C4~5、C5~6、C6~7的最优牵引角度分别为2°、4°、8°、13°、17°,为新型颈椎牵引治疗系统的开发提供依据。
参考文献
[1]王晨曦,赵改平,柏磊磊,等.下颈椎 C3-C7活动节段三维有限元的建模和验证[J].生物医学工程研究,2015,34(2):80
[2]BREKELMANS WA,POORT HW,SLOOFF TJ.A new method to analyse the mechanical behaviour of skeletal parts[J].Acta Orthop Scand,1972,43(5):301
[3]李斌,赵文志,陈秉智,等.全颈椎有限元模型的建立与验证[J].中国组织工程研究与临床康复,2010,14(13):2299
[4]刘治华,徐新伟,管文浩,等.腰椎有限元模型的建立与不同角度牵引条件下的仿真研究[J].郑州大学学报(医学版),2014,49(1):119
[5]KALLEMEYN N,GANDHI A,KODE S,et al.Validation of a C2~C7 cervical spine finite element model using specimen-specific flexibility data[J].Med Eng Phys,2010,32(5):482
[6]曹立波,奠波,卢畅.基于CT图像颈椎有限元模型的建立及验证[J].湖南大学学报(自然科学版),2009,36(1):24
[7]HA SK.Finite element modeling of multi-level cervical spinal segments (C3-C6) and biomechanical analysis of an elastomer-type prosthetic disc[J].Med Eng Phys,2006,28(6):534
[8]YOGANANDAN N,KUMARESAN S,PINTAR F.Biomechanics of the cervical spine part 2:Cervical spine soft tissue responses and biomechanical modeling[J].Clin Biomech,2001,16(1):1
[9]张昊,白净.颈椎有限元模型的建立方法及进展[J].国外医学(生物医学工程分册),2005,28(4):198
[10]林冬.一个退变颈椎三维有限元模型的建立和应用[D].成都:四川大学,2007.
[11]HONG-WAN N,EE-CHON T,QING-HANG Z.Biomechanical effects of C2-C7 intersegmental stability due to laminectomy with unilateral and bilateral facetectomy[J].Spine (Phila Pa 1976),2004,29(16):1737
[12]PANJABI MM,CRISCO JJ,VASAVADA A,et al.Mechanical properties of the human cervical spine as shown by three-dimensional load-displacement curves[J].Spine (Phila Pa 1976),2001,26(24):2692
[13]薛凤先,胡仁喜,康士庭,等.机械与结构有限元分析从入门到精通[M].北京:机械工业出版社,2010:131
[14]岳寿伟.腰椎间盘突出症的非手术治疗[M].北京:人民军医出版社,2009:16
[15]SCHMIDT H,SHIRAZI-ADL A,GALBUSERA F,et al.Response analysis of the lumbar spine during regular daily activities:a finite element analysis[J].J Biomech,2010,43(10):1849
[16]李晶,陈禾丽.颈椎牵引的力学实验与临床应用[J].中华理疗杂志,1992,15(3):133
[17]高楚荣,王丹影,李志申.颈椎牵引的力学分析[J].中华理疗杂志,1993,16(4):215
[18]姜瑛,王传堂,邹晓光,等.不同牵引力治疗颈椎病X线观察疗效分析[J].医学影像学杂志,2000,10(2):102
[19]刘凯,谢青,毕霞.颈椎机械牵引技术的作用及机制研究[J].中国组织工程研究与临床康复,2010,14(28):5272
Establishment of a three-dimensional finite element model of the C2-7 cervical spine and simulation under optimal angles traction
LIUZhihua1),XUWeichao1),ZHANGXinmin2),LIUBojian1)
1)SchoolofMechanicalEngineering,ZhengzhouUniversity,Zhengzhou4500012)ZhengzhouFeilongMedicalEquipmentCo.Ltd.,Zhengzhou450001
Key wordscervical spine;finite element model;reverse engineering;optimal angle
AbstractAim: To develop a three-dimensional finite element model of human cervical spine C2-7 and explore the effect of cervical discs with cervical traction in different angles. Methods: By using the method of reverse engineering with Mimics 10.01 and Geomagic Studio,a three dimensional geometric CAD model of the cervical spine was developed from the CT scan images of a normal adult male, then, the model was imported into Ansys Workbench 15.0, and a three dimensional finite element model was obtained and verified. After setting the boundary, the model was loaded to simulate the traction under different traction angles from 0-20° when the human body was lying down,so as to obtain optimal traction angles of each cervical discs in traction treatment.Results: The simulations revealed that the optimal traction angles for C2-3,C3-4,C4-5,C5-6,C6-7 were 2°,4°,8°,13°,17°,respectively. Conclusion: The three dimensional finite element model of cervical spine C2-7 has been established.
doi:10.13705/j.issn.1671-6825.2016.03.019
中图分类号R318
*河南省产学研合作项目142107000011
