轮式移动机械手抓取空间求取
2015-03-11朱雅乔
朱雅乔
(天津中德职业技术学院 航空航天与汽车学院,天津 300350)
轮式移动机械手抓取空间求取
朱雅乔
(天津中德职业技术学院 航空航天与汽车学院,天津 300350)
针对遥操作的移动机械手,以机械手运动学模型为基础,建立了机械手的工作空间模型,利用Labview与Solidworks建立的虚拟仿真系统的虚拟训练和运动规划模块,可以较精确地求取所需工作平面的抓取空间,为遥操作提供可靠的数据支持。
移动机械手;运动学;抓取空间
0 引言
对于移动机械手而言,移动平台扩大了机械手的工作空间,使机械手能以任意位姿完成任务,但对于借助虚拟现实技术进行遥操作的移动机械手来说,往往是进入抓取空间内,才能完成相应操作,因此需要预知抓取空间为遥操作及虚拟现实技术提供帮助。目前,移动机械手在实际工作中,除预知整个工作空间外,还需对某些工作平面精确地求取[1]。
本文研究的轮式移动机械手应用于核电站水下环境,实现水池底部异物的识别与打捞,采用遥操作控制方法。本文通过建立机械手运动学模型,获得机械手的工作空间;利用Labview与Solidworks建立的虚拟仿真系统,可以较精确地求取所需平面的抓取空间,为遥操作提供可靠的技术支持。
1 机械手运动学模型
移动机械手主要由车体,车载大摄像头,小摄像头,腰部,大臂,小臂,腕部,手爪组成,如图1所示。
如图2所示,建立四自由度机械手基坐标系{S}和工具坐标系{T},图2所示为初始位形时[2]。

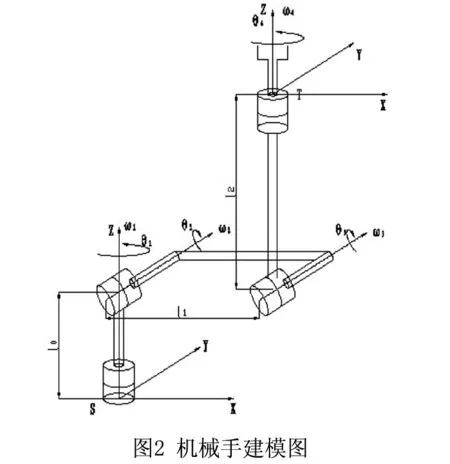
θ=0°时,工具坐标系{T}与基坐标系{S}的变换为:

各个关节的运动旋量:








于是,得到正运动学方程:

r11=c1c23c4-s1s4
r12=-c1c23s4-s1c4
r13=c1s23
r21=s1c23c4+c1s4
r22=-s1c23s4+c1c4
r23=s1s23
r31=-s23c4
r32=s23s4
r33=c23
px=l1c1c2+l2c1s23
py=l1s1c2+l2s1s23
pz=l2c23-l1s2+l0
2 机械手抓取空间
2.1 机械手工作空间
本文采用蒙特卡洛方法计算该机械手的工作空间,其实质是在各关节运动范围内随机遍历,利用运动学方程得到机械臂末端点的坐标值。蒙特卡洛方法是一种借助随机抽样的数值方法,其优点在于可利用图形输出设备将工作空间直观表现出来。本文利用Matlab运用该方法对轮式移动机器人四自由度机械手工作空间进行仿真分析。图3是工作空间仿真结果。从图中可以看出,四自由度机械手的空间活动性能,以及最大活动范围。
2.2 机械手地面抓取空间
该移动机械手最终要实现抓取水池底部物体的目的,因此在抓取之前,应首先判断该位置是否在机械手的地面抓取空间的范围内,而“云图”不能准确反映出地面抓取范围。本文通过Labview软件开发出的虚拟仿真系统,可以仿真驱动Solidworks绘制的移动机械手模型,并通过Labview的3DPicture控件的属性节点和调用节点,建立位置信息数据库,采集机械手末端位姿矩阵,为操作人员提供详细的数据支持,一旦超出机器人工作条件,立即发出警告,可有效求取所需平面的抓取空间。
2.2.1 机械手抓取空间仿真系统建立
机器人模型通过Solidworks搭建完成,图1所示为机器人的初始位置。机械手主要由车体,腰部,大臂,小臂,手爪组成,手爪的运动不影响小臂的运动信息,而小臂运动会影响手爪的运动信息,如图4所示,建立整个机器人的层次关系——“父子”关系。“父”的运动势必改变“子”的空间位置,“子”可以独立运动,不改变“父”物体的空间位置。


在Solidworks中绘制模型时完成了世界坐标系和对象坐标系的创建,便于通过几何变换实现机器人模型位置信息的变化。在Labview导入模型时,会将模型的坐标信息一同导入。将世界坐标系设定在不动的场景、标定好的原点上。绘制各个模型的同时,构建对象坐标系。充分考虑运动学分析过程中各关节坐标系的位置和方向,使虚拟模型的坐标系与真实机器人运动学坐标系吻合。
机器人模型的接口数据为各个关节的位置信息,通过调用Labview的3DPicture控件的属性节点和调用节点来实现对Solidworks搭建的虚拟机器人的运动仿真,利用接口函数传递运动信息,实现位姿转换,如图5,机器人的运动状态反映在仿真界面中。
该仿真系统具有三大功能:(1)实时控制,监测;(2)虚拟训练;(3)运动规划。不同的模块与此三维模型显示模块链接,即可实现不同的功能。
2.2.2 机械手抓取空间仿真
利用虚拟训练和运动规划模块,借助Solidworks中的Motion仿真模块中的轨迹生成和碰撞干涉检查[3]可以得到机械手的地面抓取空间最大边界曲线,如图6所示。


对于抓取空间来说,还要关心离车体很近的地方是否能够抓取,即最小边界的求取。当碰撞检测发现刚好发生碰撞时,记为终止点,如图7所示。并通过动态数据库记录该点的X、Y、Z坐标值。

通过反复大量的记录,得到机械手抓取的最小边界。综合最大抓取边界和最小抓取边界得到了机械手的水池底部抓取空间,如图8所示。

3 结论
针对遥操作的移动机械手,建立了机械手的运动学模型,获得机械手的工作空间,利用Labview与Solidworks建立的虚拟仿真平台,通过仿真系统虚拟训练和运动规划模块,可以对机械手抓取平面进行仿真,并记录坐标点信息,较精确地求取所需平面的抓取空间,为遥操作提供可靠的技术支持。
[1] 赵娜.移动机械手路径规划与控制研究[D].天津理工大学,2006
[2] 李君.基于旋量理论的Stanford臂的运动学分析[J].天津科技大学学报,2010,(4):72~78
[3] 李广鑫,曹为.基于solidworks的机械手臂虚拟设计与运动仿真[A].全国先进制造技术高层论坛暨第九届制造业自动化与信息化技术研讨会论文集[C],2010
[责任编校:张彩红]
2015-11-07
朱雅乔,男,天津人,中德职业技术学院航空航天与汽车学院助教。
TH123.1
A
1009-5462(2015)04-0063-04
