农业采摘机器人机械臂结构开发与试验研究
2024-05-07赵伟冬
赵伟冬
(西安交通工程学院,陕西 西安 710300)
现阶段工业机器人已经拥有了较高的自动化水平,而农业采摘机器人作为现代新兴的机械设备仍处于研究阶段[1]。农业机器人包含的部件类型多种多样,机械臂便是其中十分重要的一种。为了使得农业采摘机器人可以更好地满足不同环境与工况下的应用需求,国内外许多专家、学者都针对农业采摘机器人进行了深入的探究[2]。美国、澳大利亚等国家学者希望通过视觉传感器建立准确、高效的农产品自动识别系统,着重解决水果、蔬菜等无人化采摘问题;我国的专家学者根据水果、蔬菜等不同农产品的特征与作业要求,提出了采用机械臂完成农业作业。基于此,进一步加大对农业采摘机器人的研究力度,创新与改进机械臂结构,开发设计出更加高效的新型技术,尤为重要。
1 机械臂机构原理
1.1 机械臂运动求解
机械臂动力学分析需要从两个方面进行,即正运动学分析和逆运动学分析[3]。从农业采摘机器人机械臂的运动学分析层面来看,其机械臂运动求解的目的是希望得到机械臂正运动学与逆运动学两种运动的结论[4]。在机械臂实际运动过程中,机械臂关节空间和机器人工作空间有着较为紧密的非线性映射关系,并且这种关联还和机器人尾端执行设备位姿密切相关,总的来说,机械臂关节空间和工作空间的运动学关系如图1所示。
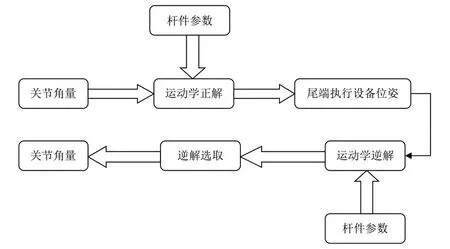
图1 机械臂关节空间和工作空间的运动学关系
机器臂结构关节以相应姿势进行运动时,正机械臂的尾端位姿与逆机器臂的尾端位姿在位置上存在一定的关联性,和其相匹配的动力学模型关系重点体现在以下几个方面。
1)当农业采摘机器人机械臂的尾端位姿是明确的,这时结合各个关节的运动学工作原理,能够得到机械臂相对应的运动学方程,如式(1)所示:
公式(1)中,表示齐次变化矩阵,θi表示机械臂不同关节转动的角度。
2)把和θ1相关的运动学变化矩阵变化到运动学方程的左侧,这时能够获得公式(2):
1.2 运动学数学建模
从数学建模层面来分析,机械臂从之前的关节空间转化到尾端笛卡尔空间,实质上体现的是机械臂的正向运动学情形[5]。基于机械臂数学坐标系能够获取到不同关节的转动角度,在此前提下能够获得机械臂尾端坐标系的准确位姿。假设机械臂连杆的齐次变化用矩阵A来体现,这时能够获得如式(4)所示的代数矩阵[6]:
因为机械臂的每个关节均是能够任意角度转动的,因此将其规划成5 类变化矩阵,即A1~A5,这时可获得机械臂尾端的齐次变化矩阵,如式(5)所示:
公式(5)中,各个不同类型r表示机械臂尾端关节坐标系X轴、Y轴以及Z轴三个方向的余弦,px、py以及pz分别代表机械臂尾端关节在X轴、Y轴、Z轴原点的坐标。这时能够获得中各个矩阵元素的数据,如式(6)所示:
1.3 机械臂笛卡尔空间轨迹设置
在实际进行机械臂笛卡尔空间轨迹设置过程中,选取机械臂的中间位置点,同时将插补算法应用到该点坐标核算中,这时可以获得机械臂的位姿,之后把中间点机械臂的位姿变化为与之相匹配的关节角,从而在机械臂尾端处确定好关节角的控制策略,最终完成机械臂笛卡尔空间轨迹设置[7]。机械臂位姿控制流程如图2所示。
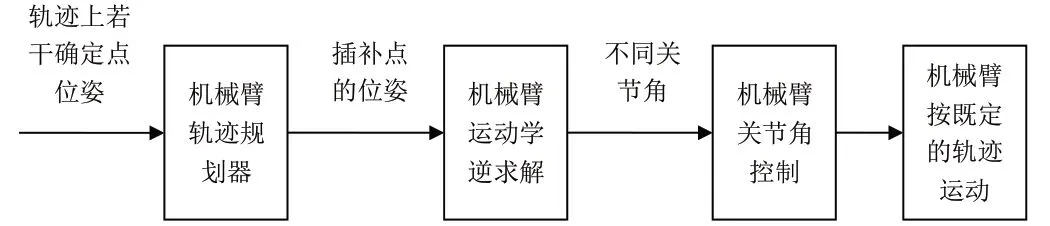
图2 机械臂位姿控制流程
2 机械臂结构开发和设计
本研究中机械臂结构使用的是双关节串联,总共包含了6 个自由度,涵盖了视觉模块、驱动模块以及控制模块等。具体来说,控制模块涵盖了电机、视觉系统以及开关等多种模块[8]。采摘机器人机械臂尾端的夹持装置处设置有两个串联的圆柱形橡胶块,同时将视觉传感器以及编码器等放置在橡胶块上。末端夹持装置以伺服电机为动力单元,带动夹持装置圆杆旋转,进而将物体稳固夹持起来。因为农业采摘机器人的工作环境多为户外,环境条件不好,为了确保采摘机器人能够稳定工作,可在机械臂上设计喷雾机构,实现对抓取目标的清洗。机械臂在实际工作过程中,为了避免较大外力对其造成损伤,在其尾端夹持装置上设计限位器。在视觉和驱动模块中间规划有包含电动机和减速机的传动装置;在机械臂尾端的夹持装置和视觉模块中间规划有包含电动机和油缸的传动装置;为了更好地降低采摘过程中的振动,机械臂底座和机械臂连接位置设计有减震垫。另外,由于农业果实的硬度存在较大差异,在机械臂各个关节处给予了不等的力矩,以改善果实采摘的质量[9]。
3 试验验证与分析
3.1 机械臂尾端执行机构的运动数据
在进行机械臂结构设计的过程中,尾端执行机构的运动数据是十分重要的参数[10]。结合机械臂尾端执行机构的运动空间与力学性能等,选取科学的关节转动角,在此基础之上得到机械臂尾端执行机构最大运动位置。若机械臂关节转动角速度是800°/s,可以确保末端执行机构能够稳定地夹持住果实,并在运动中不会出现掉落情况。事实上,机械臂尾端执行机构与相应关节的转动角速度之间有着紧密的联系。当机械臂手指转动角速度是800°/s 时,对应的转动角度是180°,并且需要施加的力矩大小为10.2 N·m;当机械臂手指转动角速度是1 200°/s 时,需要施加的力矩大小为13.5 N·m,这种设计可以满足机械臂尾端执行机构的运动需求。就农业种植方面而言,西红柿是最为常见的垂直面栽培作物。因为西红柿花与叶的生长规律并不统一,导致西红柿果实通常出现在茎叶外侧,农业采摘机器人可以较好地实现对这种类型作物的采摘。然而,因为西红柿存在多个品种,还需要针对不同西红柿进行差异化设置。例如,正常西红柿的果实数量为4 个左右,但樱桃西红柿的果实数量能够达到十几个。因此,为了能够获得更快的采摘速度,应当要注意规划适宜的采摘方案。
3.2 机械手抓取精度
农业采摘机器人通过控制机械臂动作来实现对目标物体的精准抓取,当定位误差较大时,极易造成机械手无法准确抓取到目标。为了更好地验证本研究中设计的农业采摘机器人机械手的抓取精度,把机械臂和移动平台放置到离目标物体2.5 m 位置处开展抓取试验,从而验证机械手的实际抓取精度。本机械臂尾端的机械手是一种双指夹持型结构,能够在较小工作空间内使用,同时可以满足不同规格目标物体的抓取要求。试验结果表明,机械手夹持装置通过平移方式运动到旋转关节时,机械臂尾端点的运动位置和理论位置之间的误差值未超过0.01 mm。从而可以看出,本文开发的农业采摘机器人6 自由度机械臂结构能够适应实际的使用空间与运动范围,拥有很高的运动精度,可以满足农作物果实采摘要求。
4 结语
本研究基于动力学原理创设了数学动力模型,实现了对农业采摘机器人机械臂的开发和控制,该机械臂能够满足不同类型农业果实的采摘要求。仿真结果表明,该机械臂能够准确定位待抓取目标,并且可以顺利完成抓取动作,机械臂尾端点的运动位置和理论位置之间的误差值未超过0.01 mm。
