主动前轮转向控制特性研究
2024-04-26康瀚文
康瀚文 ,张 磊 ,姚 阳
(国家管网集团北京管道有限公司,北京 100101)
0 引言
主动前轮转向系统(Active Front Wheel Steering System, AFSS)介于线控转向与电动助力转向之间,兼具电动助力转向系统的结构集成及线控转向可主动干预车辆转向的优势[1],因此逐渐成为主动式转向的研究热点。
针对AFSS,已有大量学者对其展开了相关的理论研究,主要集中在变传动比设计及稳定性控制方面。PID 算法具有简单、可靠性高、易实现的优点[2],因此受到了学者们的广泛关注。文献[3]利用PID 算法对AFSS 进行了研究,固定的PID 参数难以满足多变工况的要求,因此缺乏必要的鲁棒性。文献[4]以横摆角速度作为反馈变量,建立车辆二自由度模型,采用遗传算法优化了PID 算法的参数,进而改善了AFSS 的鲁棒性。文献[5-6]利用最优控制理论,提出了一种AFSS 控制策略,以横摆角速度、方向盘转角为优化目标,通过控制目标函数的方式提高了车辆的稳定性,但最优控制理论依旧属于线性控制方法,而实际的车辆中含有大量非线性元件,因此该方法具有一定的局限性。
滑模控制是一种非线性控制方法,兼顾了抗干扰能力强、收敛速度快、简单易实现的优点,因此被广泛应用于AFSS 中,文献[7-10]均采用了滑模控制算法,设计了多种AFSS 控制器,验证了滑模控制算法在AFSS 控制中的有效性及优势。本文基于滑模控制对AFSS 展开研究,搭建了二自由度车辆模型、AFSS控制器模型,并将控制器与Carsim 进行了联合仿真,验证了该控制器对提高车辆转向稳定性具有较大的作用,且总结了不同车速、路面附着系数下,控制器性能的变换,可为AFSS 控制器的开发提供一定的理论指导。
1 二自由度汽车模型
建立理想二自由度车辆参考模型,虽将整车模型进行了简化,包括轮胎的侧偏特性和车辆横摆响应特性,但仍能较好地表示车辆横摆角速度和前轮转向角之间的关系,可得到理想的横摆角速度[8]。
根据文献[8]可得汽车二自由度模型为:
式中,Iz为车辆绕z轴转动惯量,kg/m2;m为整车质量,kg;u为汽车在x轴上的质心速度分量,km/h;Rr为横摆角速度,deg/s;δ为前轮转角,deg;K1、K2分别为汽车两前轮、后轮侧偏刚度,N/deg;a、b分别为质心到前后轴距离,m;β为质心侧偏角,deg。
将式(1)简化为状态方程,如下:
当车辆处于稳态时,=0,=0,β=u/v,代入式(1)得:
消去v,求得稳态横摆角速度Rd为:
其中,k为稳定性系数,
该稳态横摆角速度Rd没有考虑路面附着状态的影响,当路面附着系数较小时,车辆不足以产生较大的横摆角速度,因此车辆侧向加速度ay应小于路面附着系数p决定的加速度(即ay=pRr)。假设汽车做匀速圆周运动,得:
推导得理想横摆角速度最大值为:
则理想横摆角速度的值为:
2 基于滑模控制的主动前轮转向控制策略
以Carsim 输出横摆角速度作为车辆的实际横摆角速度Rr,二自由度汽车模型输出的横摆角速度作为理想横摆角速度,两者之差为控制误差s,并以此构建滑模面q:
式中,λ为正的加权系数,其主要影响控制器的收敛速度及抖振。
对式(11)求导可得:
当˙q=0时,联立式(2)、式(3)、式(4)、式(5),求得:
3 控制器效果的仿真验证
搭建Simulink 与Carsim 的联合仿真环境,如图1 所示,Simulink 模型中的车辆参数则采用Carsim中的C 级车参数。取车速分别为40 km/h、80 km/h、120 km/h,地面附着系数为0.8 进行控制器效果的仿真验证,仿真结果分别如图2、图3、图4 所示。
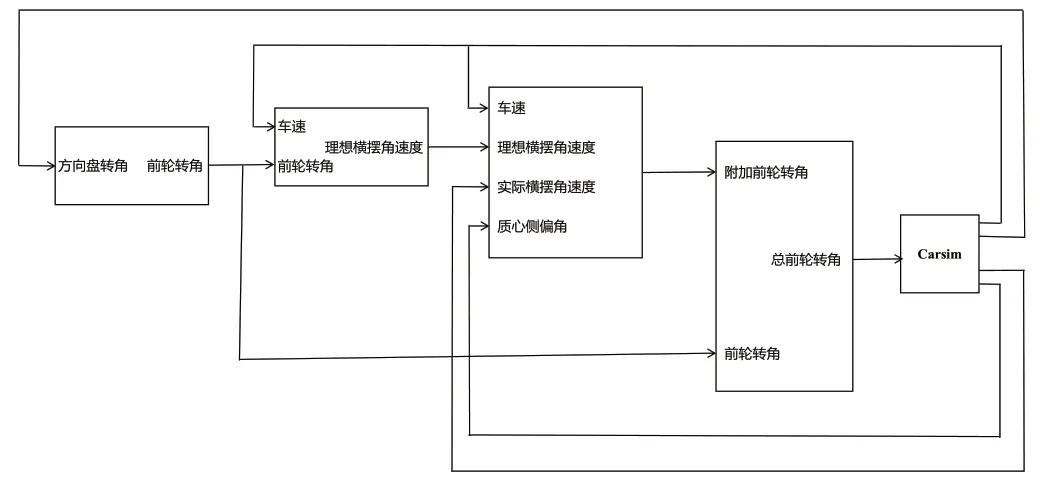
图1 联合仿真环境
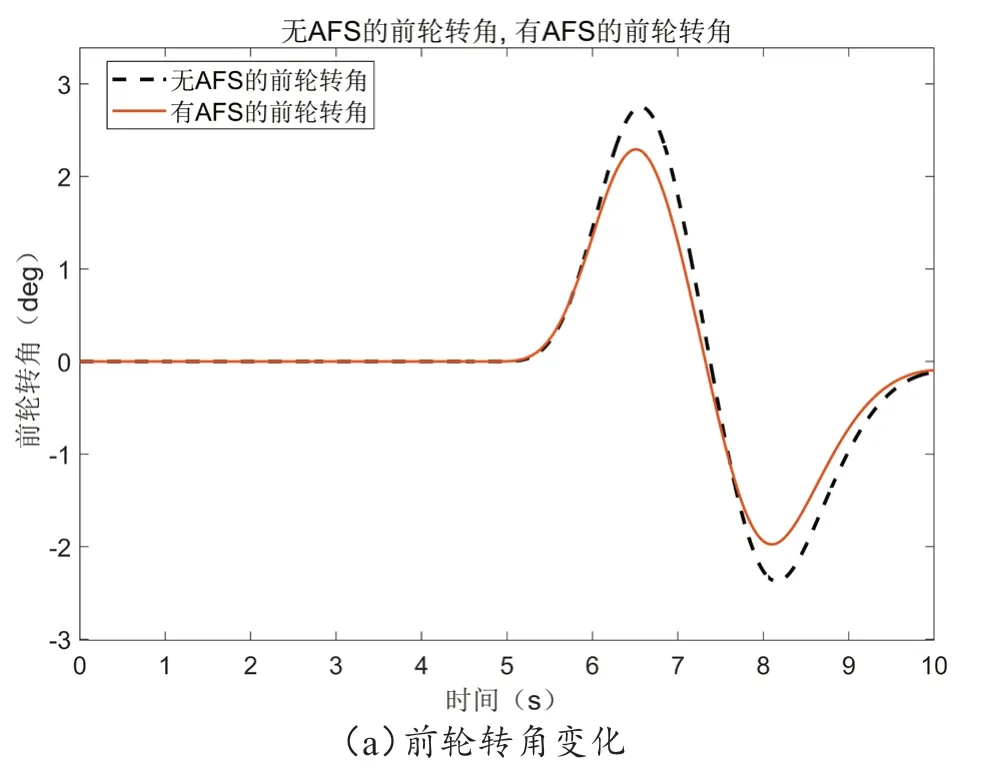
图2 车速为40 km/h 时控制器效果
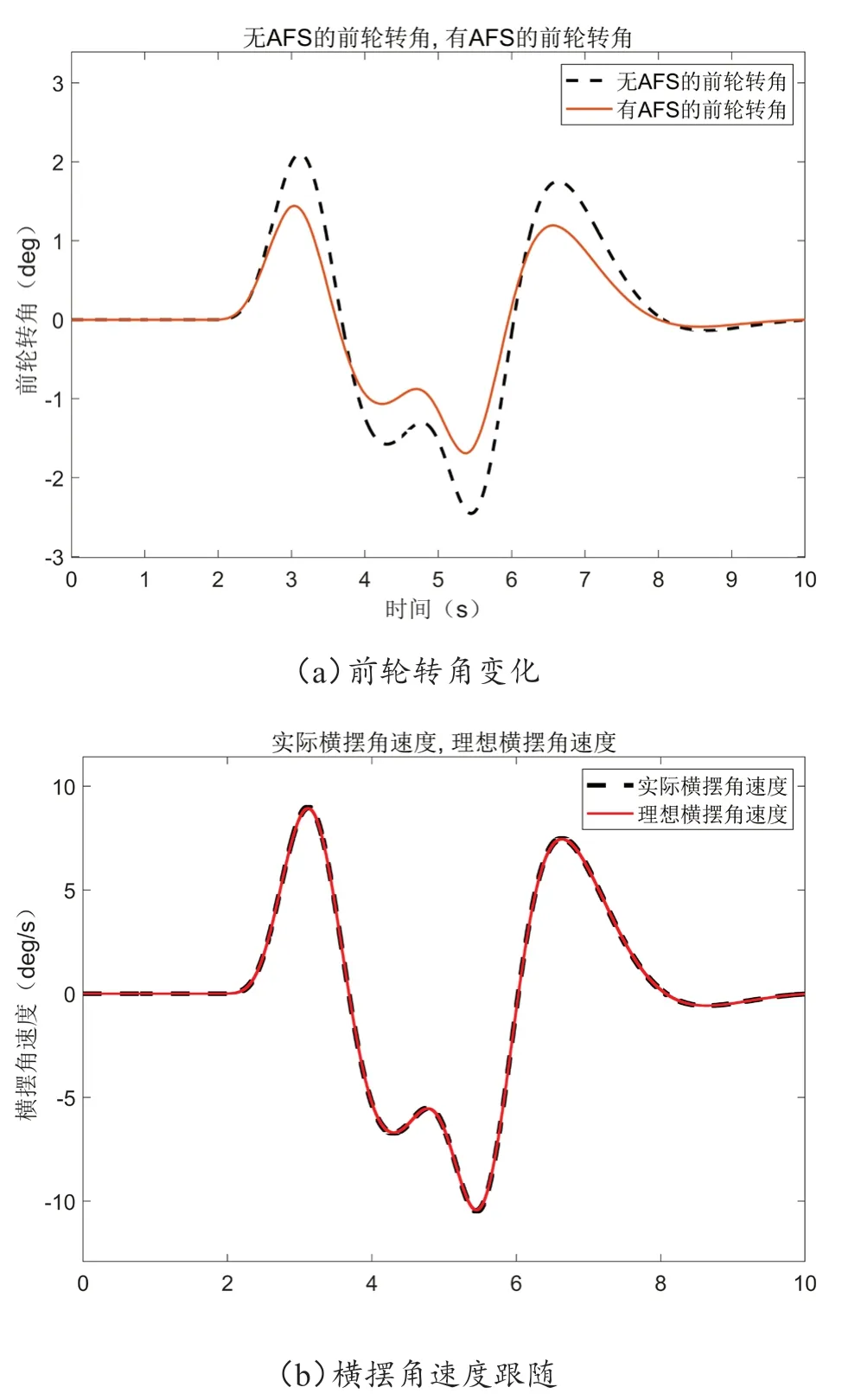
图3 车速为80 km/h 时控制器效果
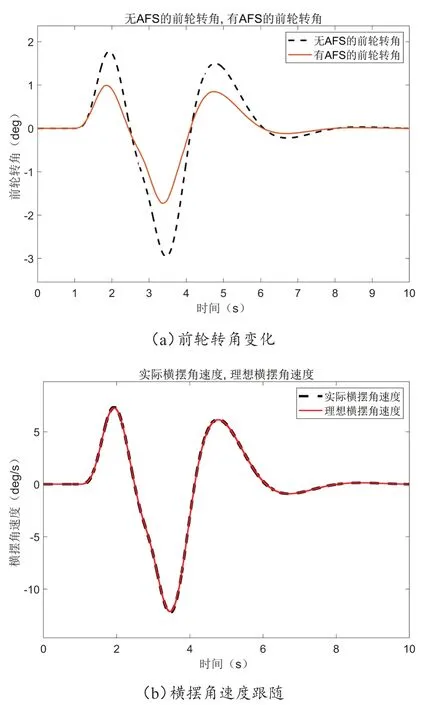
图4 车速为120 km/h时控制器效果
根据仿真结果可知,控制器提供了一个附加转角给前轮,使得不同车速下的实际横摆角速度能始终紧密跟随理想横摆角速度,且无明显抖振。
4 结论
本文利用二自由度车辆模型获取了理想横摆角速度,基于滑模控制搭建了主动前轮转向控制器,并通过与Carsim 的联合仿真验证了不同车速下实际与理想横摆角速度的跟随情况。仿真结果验证了主动前轮转向控制器提供的附加前轮转角可使实际横摆角速度紧密跟随理想横摆角速度,对于提升车辆稳定性有重要意义。
