考虑车身摇晃和滑移的无人农机航向控制技术*
2024-04-26汤艳玲刘蓝晴
李 蒙 ,王 源 ,汤艳玲 ,王 鹏 ,刘蓝晴 ,夏 宇
(扬州大学机械工程学院,江苏 扬州 225127)
0 引言
精准农业与智慧农业是国家提出的重大发展战略,无人农机是推动传统农业向精准化、智慧化转型升级的重要工具[1]。无人农机工作在以松软、湿滑与泥泞田间路况为主的复杂环境下,极易发生滑移现象,其具有幅值范围宽、无法预知等特点,对农机转向轮的转动角及航向系统均会产生较大影响。众多研究表明,农机的路径跟踪主要通过控制航向来实现。因此,航向控制性能对农机位置控制起到至关重要的作用,同时也密切关联着其轨迹控制精度、工作精度和效率,所以研究未知大侧滑情形下的无人农机航向控制技术具有重大意义。
目前,针对农机航向控制主要分为基于运动学和基于动力学模型的方法。基于运动学模型的航向角控制系统不需要诸如路面-轮胎作用力、变量耦合关系与非线性特性等参数,将航向角变化率等效为前进速度和轮胎转向角的非线性函数,使得控制方案具有结构简单和易于实现等优点。为此,一些控制方法被成功应用到了航向角控制系统设计中。文献[2]采用PID 控制方法,将航向偏差与横向偏差加权合成为综合误差进行控制,提高了无人农机的航向控制精度。文献[3]采用模型预测控制(Model Predictive Control,MPC),将遗传算法参数优化器与标称系统模型预测控制器复合以降低无人农机航向控制误差。文献[4]采用终端滑模控制方法,通过非线性干扰观测器对模型参数进行优化以抑制系统抖振,提高了无人农机航向控制精度。但是,基于运动学模型的控制方法未考虑角运动中农机所受到的合外力矩、变量之间的耦合关系、模型非线性特性以及外部复杂的作业环境影响。因此,航向角闭环系统普遍具有鲁棒性不强和跟踪精度不高[5]等缺点。为此,研究人员提出建立农机的航向动力学模型,并以此为基础设计航向角控制系统。文献[6]采用线性二次调节控制器,结合系统辨识所建立的动力学模型,实现了对航向角的柔化控制。但是滑移率、土壤性质等非线性变化不易精确建模,导致控制效果不理想[7]。文献[8]采用MPC 和滑模控制器进行分层控制的方法,通过对航向控制中的不确定性因素进行抑制,降低了无人农机的航向角跟踪误差。文献[9]采用自抗扰控制方法,并通过粒子群算法对控制系统参数进行优化以提高无人农机的航向控制精度。文献[10]采用鲁棒控制方法,通过使用鲁棒精确微分器来估计集中扰动并加以补偿,抑制了大扰动对无人农机航向控制精度的影响。文献[11]采用滑模控制与有限时间控制复合的方法,通过在有限时间内抵消扰动效应以提高无人农机的航向控制精度。虽然上述基于动力学模型的控制方法取得了一定的研究成果,但是仍旧存在如下几点待改进之处。
1)大多数文献建立航向角动力学模型需要精确的参数。农机的作业环境极为复杂,地面环境与气候、土质和前茬作物等因素密切相关,其物理特性难以掌握,有时甚至难以测定,使得地面与轮胎之间的作用力具有很强的非线性、时变与不确定特性,其数学关系难以或者不能建立。
2)大多数文献并未考虑地面不平整所引发的车体侧翻与俯仰运动。农机的作业环境非常复杂,地面平整度较差,因而侧翻与俯仰运动加剧了农机的侧滑,且此影响不能忽略。
3)大多数文献并未考虑滑移造成的影响。一方面,滑移使得农机产生不确定的附加航向角速率,对航向角造成较为严重的干扰;另一方面,滑移容易带给转向轮附加角度,使得农机的控制力矩出现不确定性,加大了农机的控制难度。
为此,本文考虑侧翻与俯仰运动,建立农机的六自由度运动模型,提出一种可同时补偿匹配与不匹配干扰的航向角预测控制方法,以提升系统跟踪精度与抗干扰的鲁棒性。
1 运动建模
1.1 运动分析
在建立运动模型之前,需要分析农机运动情况(车体构型、几何参数、受力、速度和滑移)。本文选取四轮构型农机为研究对象,其前轮用于转向,后轮用于驱动。车体几何参数与受力情况如图1(a)所示,相关速度变量与滑移分析如图1(b)所示。
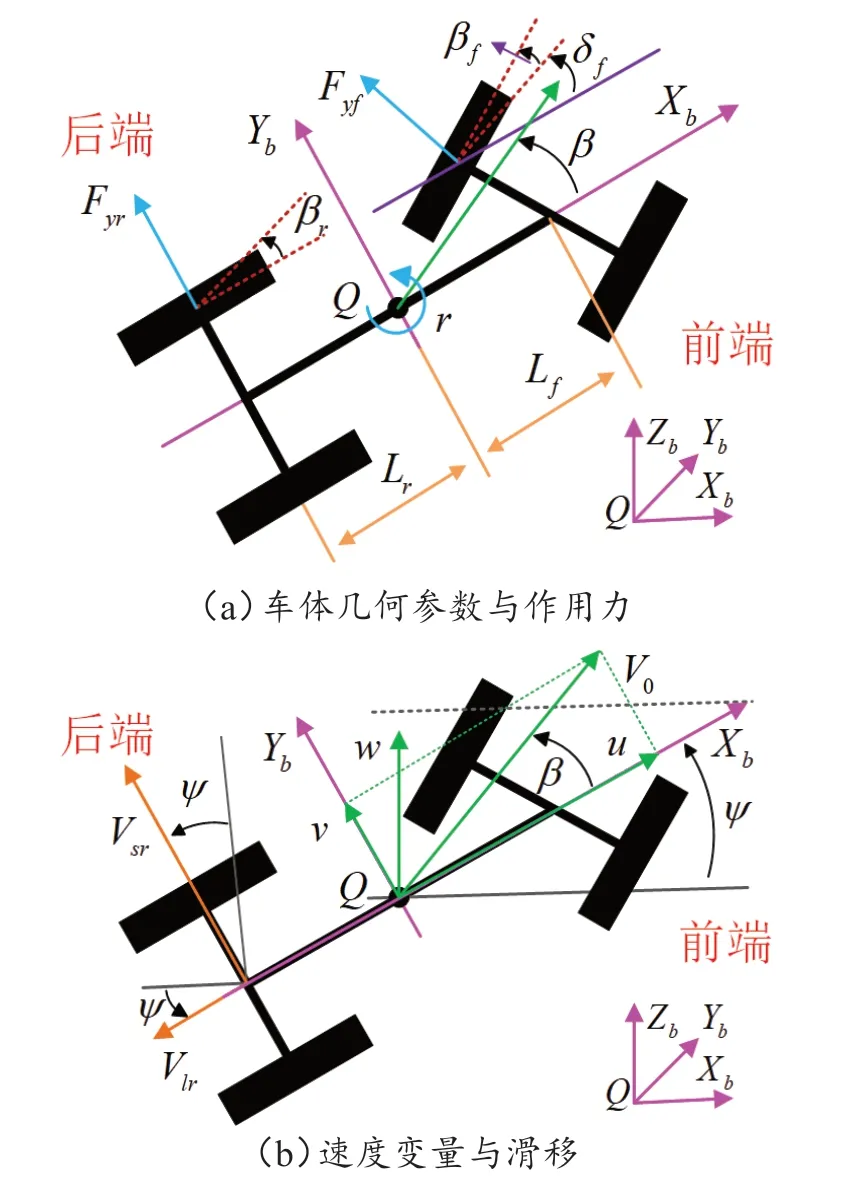
图1 运动示意图
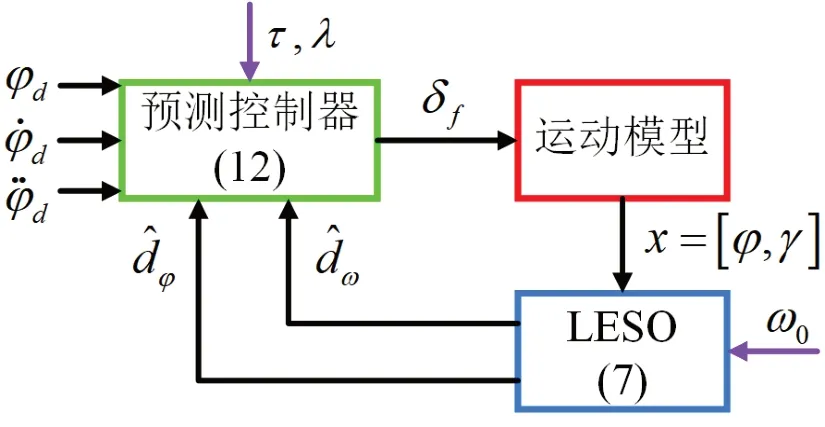
图2 控制框图
用符号{B}表示车体坐标系,与农机重心固连。图1中各个变量的含义如表1所示。
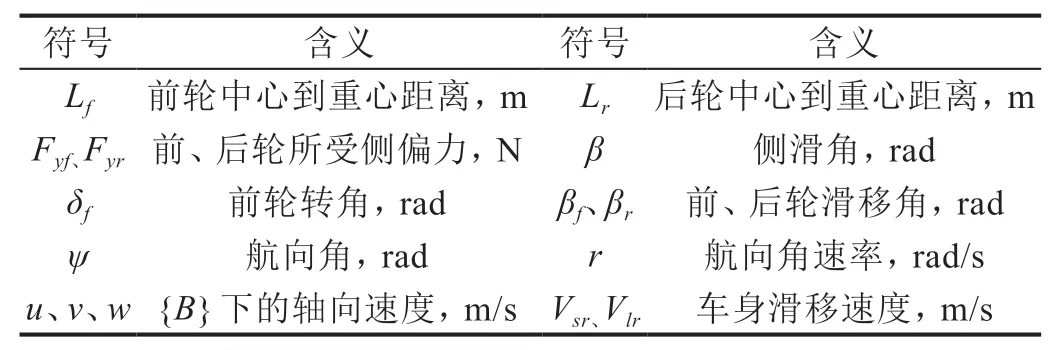
表1 变量名称与含义
1.2 运动学模型
一般情况下,研究人员在设计路径跟踪控制系统时认为农机仅做平面运动,其角运动仅有航向(绕QZb轴)方向,依靠航向角控制降低路径跟踪误差。但是,在非常松软的路面与水田等复杂作业环境下,农机并非做平面运动,车身容易绕QXb轴和QYb轴产生摇晃(分别记为φ与θ),这两个摇晃角会在QZb方向产生分量,进而影响路径跟踪的精度,因此必须考虑两个摇晃角带来的影响。
记:p与q分别为农机绕QXb与QYb轴的转动角速率。考虑摇晃角φ、θ以及滑移速度的影响,根据文献[12],对ψ求导可得农机的航向角运动学模型:
正常作业时农机的运行速度较低,因此摇晃角φ、θ与Vsr均具有慢时变特性,即均成立。
1.3 动力学模型
结合文献[13]可得,考虑前轮滑移角Δδf的农机侧偏角可表示为:
农机受到的侧偏力可用如下线性关系近似表示:
其中,cf与cr分别为轮胎前、后轮侧偏刚度系数。
结合式(3)、图1(a)与文献[12],农机的航向角动力学模型为:
其中,Ix、Iy与Iz分别为农机绕QXb、QYb与QZb轴的转动惯量,Ixz为惯性矩;γr为未建模动态和外部干扰复合而成的不确定项。
但是,在设计控制器时,br的使用值与实际值之间必定会存在误差,因此,式(4)可改写为:
2 控制系统设计
本节首先设计干扰观测器[14],用以估计匹配干扰dr0和不匹配干扰dψ;其次,设计预测控制器,用以提升航向角系统抗干扰的鲁棒性。
2.1 干扰观测器设计
定义:x=[ψ,r]T,b=[0,¯br]T,D=[dψ,dr0]T,则公式(1)和公式(5)可写成如下紧凑形式[12]:
由于农机的航向角和角速率可分别通过传感器测得,因此,针对公式(1)和公式(5),可设计如下线性干扰观测器:
其中,z1∈R2用于估计x,z2∈R2用于估计D;β1和β2为观测器增益,其取值按照式(8)确定:
2.2 预测观测器设计
记航向角参考信号为ψd,定义跟踪误差为e=ψψd,并用dψ和dr0的估计值和代替真实值得到:
则在预测时域长度τ>0 时,跟踪误差e的预测值可表示为:
选择如下性能指标函数:
其中,λ>0为系统输入的惩罚因子。
根据极值存在必要条件∂J/∂δf=0,并结合式(9)至式(11)可得系统的控制律:
2.3 控制流程
农机航向角控制系统的设计流程可用如下控制框图表示。
3 仿真验证
本节通过数值仿真实验将所提方法与基于传统运动学的MPC 方法进行对比以证明所提方法的优越性。本文所用控制器参数值:ω=0.2π rad/s,λ=0.001,t=0.08 s。期望航向角:ψd=0.1sin(ωt) rad。无人农机的模型参数为:m=1 441 kg,g=9.81 N/kg,Lf=1.011 m,Lr=0.789 m,Ix=1 927 kg·m2,Iy=1 262 kg·m2,Iz=791 kg·m2,Ixz=50 m4,Cf=96 475 N/rad,Cr=106 475 N/rad,Vsr=0.5 m/s,Vlr=0.5 m/s。仿真中系统的初始值为:u(0)=3 m/s,v(0)=0,φ(0)=0。为了全面地说明所提方法的优越性,定义k=br/,分别设置了k=0.5,k=1,k=1.5 三种不同的扰动估计准确度,仿真及对比结果如图3至图6 所示。
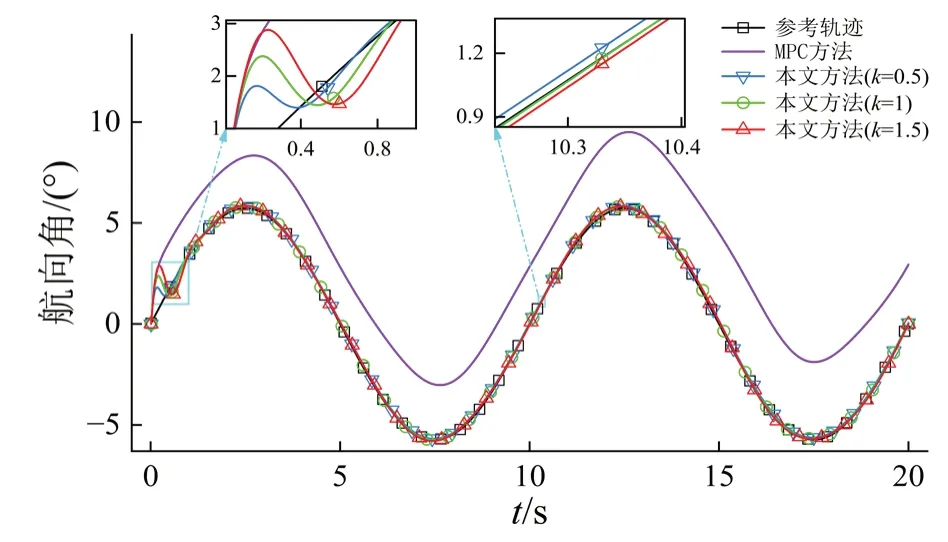
图3 航向角
仿真结果表明,基于本文所提方法的航向角控制效果明显优于传统的基于运动学模型的MPC 方法。由图3 和图4 可得,基于MPC 方法的最大跟踪误差达到4.732°,平均误差达到3.225°,且闭环系统未进入稳态。而所提方法的最大跟踪误差仅为2.122°,平均误差仅为0.105°,稳态误差最大值仅为0.149°,稳态平均误差仅为0.057°,相较于MPC 方法,航向角跟踪精度得到大幅提升。因此,在不需要详细运动模型及参数的情况下,所提方法将航向角的最大跟踪误差降低了55.16%,平均误差降低了96.74%,且在1.5 s 内迅速达到稳态,显示出更高的控制精度和鲁棒性。这是因为所使用的干扰观测补偿机制极大地削弱了外部干扰和模型参数摄动对控制精度的影响;对比于参数没有发生摄动的情形,本文方法在±50%大摄动情形下的控制精度与无摄动情形几乎相同,这是因为预测控制方法可使得干扰观测器在存在较大估计误差时也能保证闭环系统具有很高的控制精度和较强的鲁棒性。
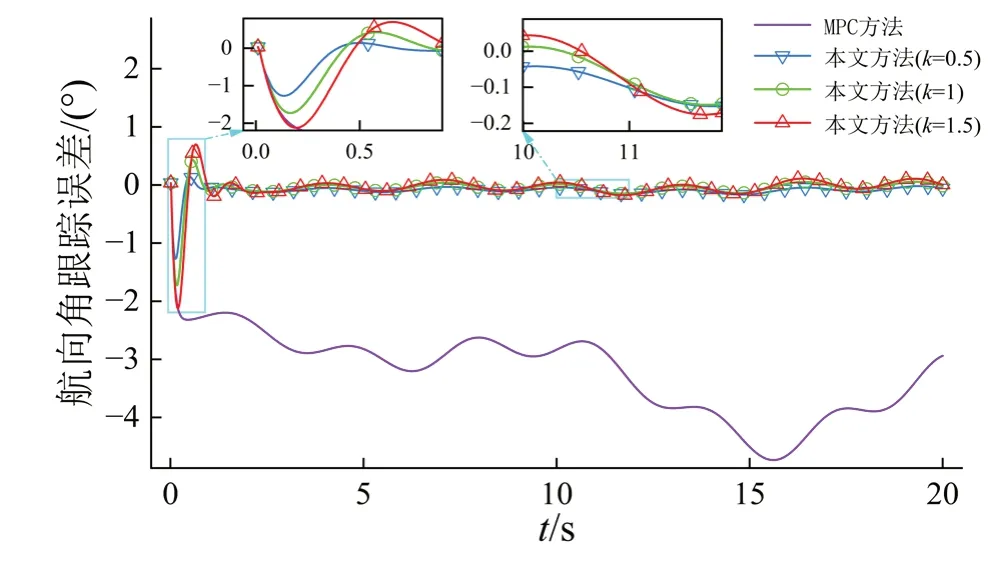
图4 航向角跟踪误差
由图5 和图6 可得,本文方法下的前轮转角与航向角速率在前1.5 s 内波动较大,这是由于仿真初始阶段的干扰估计值与实际值的偏差较大。而在1.5 s后,估计值变得非常精确,波动逐渐趋于平稳,这是由于预测控制方法提高了闭环系统的鲁棒性,使其在大干扰和估计偏差较大时可保证控制的精度。对比于没有参数摄动的情形,即使在±50%的参数大摄动情形下,前轮转角与无摄动情形几乎相同,说明本文方法具有更好的鲁棒性。
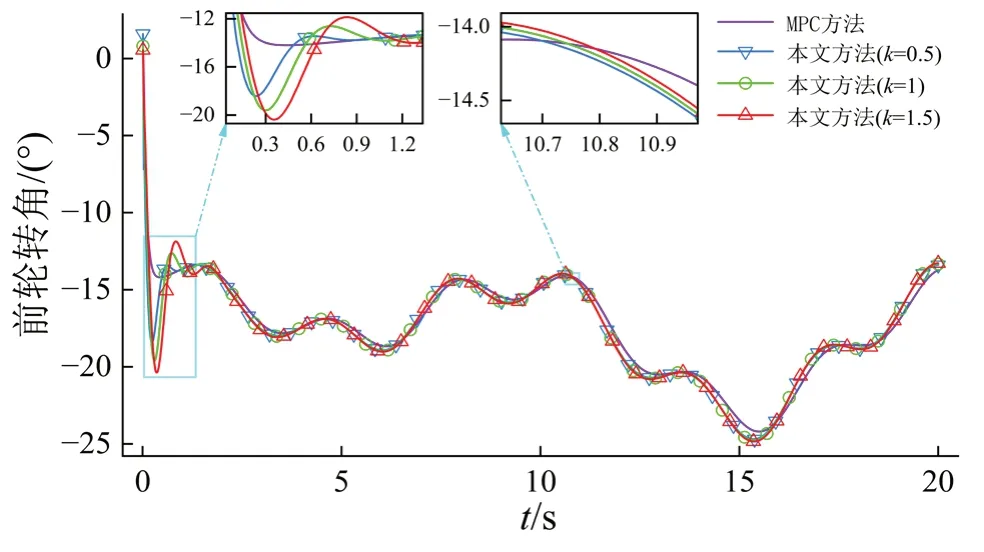
图5 前轮转角
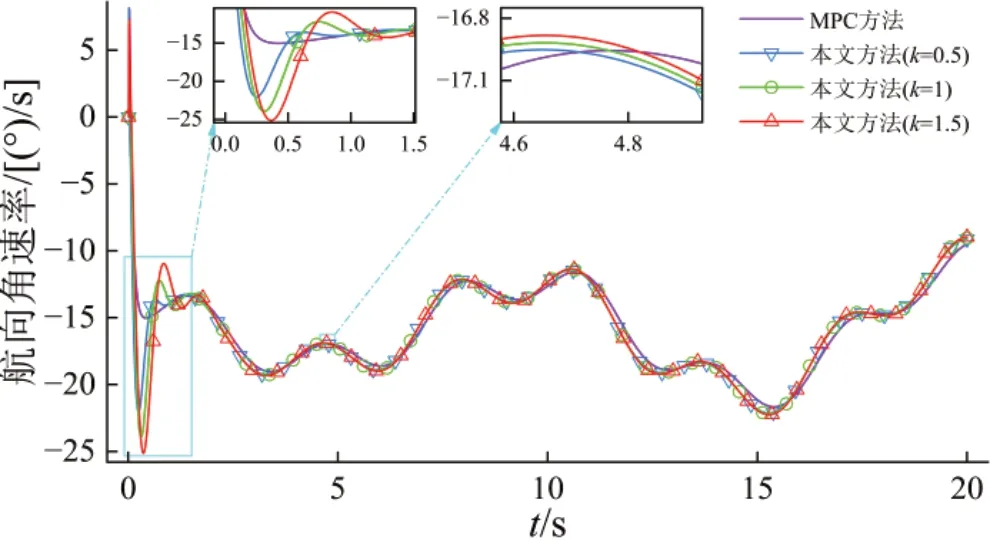
图6 航向角速率
4 结论
本文针对复杂作业环境下无人农机航向系统易受车身摇晃和大滑移影响的问题,提出一种鲁棒性较强的航向角抗干扰预测控制方法。仿真结果表明,相较于传统的基于运动学模型的MPC 方法,所提方法极大提升了航向跟踪精度和抗干扰的鲁棒性,在复杂作业环境下基于所提方法的无人农机航向系统具有更好适应性和应用前景。
