基于自主导航的校园智能配送机器人设计*
2024-04-26钟宇明陈衍艺郑詠文赖壮炯
钟宇明 , 余 江 , 陈衍艺 , 郑詠文 , 赖壮炯
(1.广东海洋大学机械工程学院,广东 湛江 524088;2.广东海洋大学深蓝智能机电产品创新团队,广东 湛江 524088;3.广东海洋大学电子与信息工程学院,广东 湛江 524088)
0 引言
在当今高校校园内,饮食配送服务已经成为学生生活中不可忽视的重要议题。随着大学校园面积的扩大,学生宿舍区与餐厅之间的距离越来越远,学生在用餐时间内不得不花费大量时间和精力往返于宿舍和餐厅之间。这种现象不仅浪费了学生宝贵的学习和休息时间,也对学生的生活质量造成了一定的影响。另外,在恶劣天气条件下,校园饮食配送服务常常面临种种困扰。传统的人工配送在极端天气下难以顺利进行,这既影响了学生的饮食安排,也增加了校园管理的难度。尽管市场上已经存在一些配送机器人,但普遍存在着自身质量重、造价高、配送数量有限等问题,无法满足高校校园内多单配送的需求。目前虽然有“万小饿”这样专门针对城市和办公写字楼的配送机器人,但是其自身质量较重且造价高昂,每次只能送3 单外卖,不适合在校园里完成一次多单的配送任务[1]。
为了解决这一问题,本研究提出了一种新型的智能饮食配送机器人方案。旨在充分利用先进的技术手段,通过设计一种智能送餐机器人,以分担短距离的送餐任务或与送餐员接力运送[2],从而为学校提供更加便捷、高效、安全的餐食配送服务,提升校园生活的便利性和舒适度。
1 结构设计
本机器人的主体结构主要由前挡板、后挡板、侧挡板、横杠条、排水板、底板、第二层支撑板、红外光电传感器、前置支架、前置支架固定件、摄像头、电机、电机支架、车轮组成,机器人主体结构如图1 所示。机器人主体结构包括两块侧挡板,上端具有凹槽,用于固定横杠条和取餐结构。侧挡板上部中部有凹槽,用于安装排水板,以保护机器人内部控制元件不被雨水侵坏。排水板倾斜安装,起到有效排水的作用。机器人四周配有红外光电传感器,前部传感器安装在前置支架上,前挡板有空洞供传感器检测障碍物。前置支架可调节夹角并用螺栓固定,摄像头位于前挡板上,用于捕捉周围图像信息。底部有四个电机,各有电机支架固定在底板上。机器人主体内有支撑架,用于放置电子元件,充分利用内部空间。
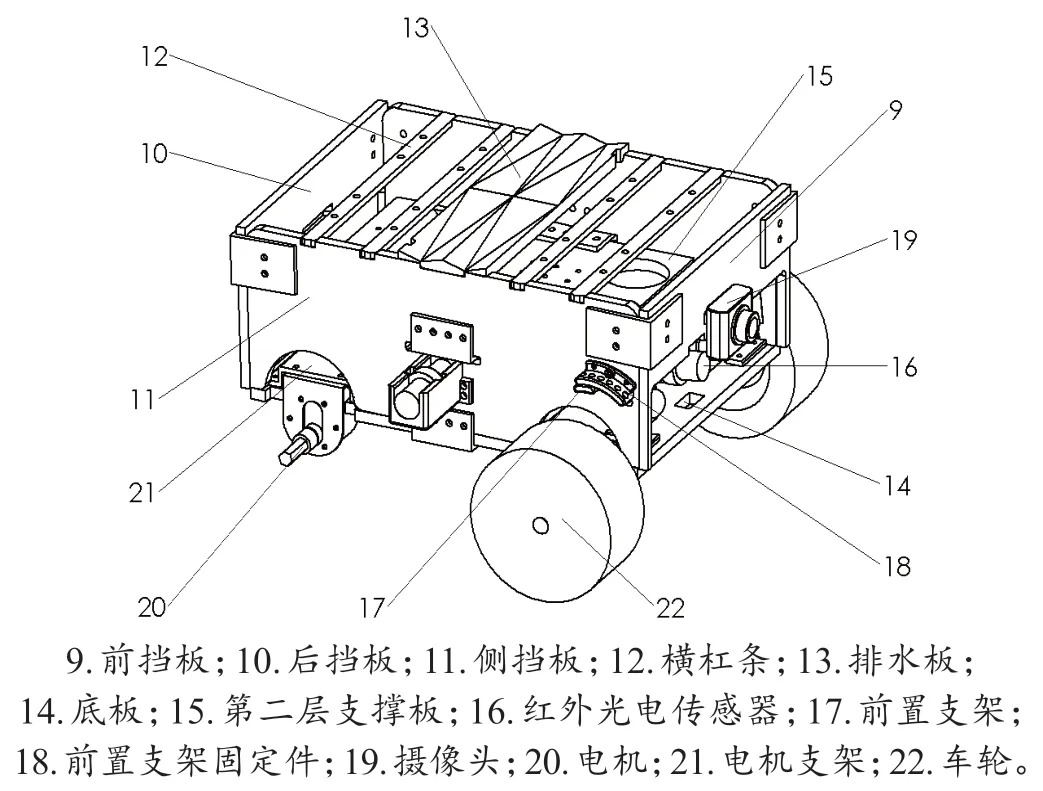
图1 机器人主体结构
2 硬件设计
2.1 控制系统设计
该智能配送机器人的硬件系统要求包括STM32单片机模块、自主设计的PCB 电路、激光测距模块、北斗定位模块、摄像头、红外传感器等。系统需具备高性能、低功耗、稳定性强等特点,确保在校园环境下稳定运行。
2.2 硬件电路设计
自主设计的PCB 电路板主要集成了主控STM32单片机、电源模块、电机驱动模块以及传感器和上位机的供电与信号传输模块。
电源模块的核心为MP2236 芯片,是一款高频同步整流降压开关变换器,通过调整其前馈电容至22 μF 可得到模块的最佳输出电压[3]。在运动控制方面,机器人采用BTN7971B 驱动芯片,其优越的电机控制性能和高效率,可以确保机器人平稳、精准运动。该芯片具有卓越的功率转换效率和温度稳定性,可为机器人系统提供可靠动力支持,确保高效运作。直流电机驱动模块原理(部分)如图2 所示。
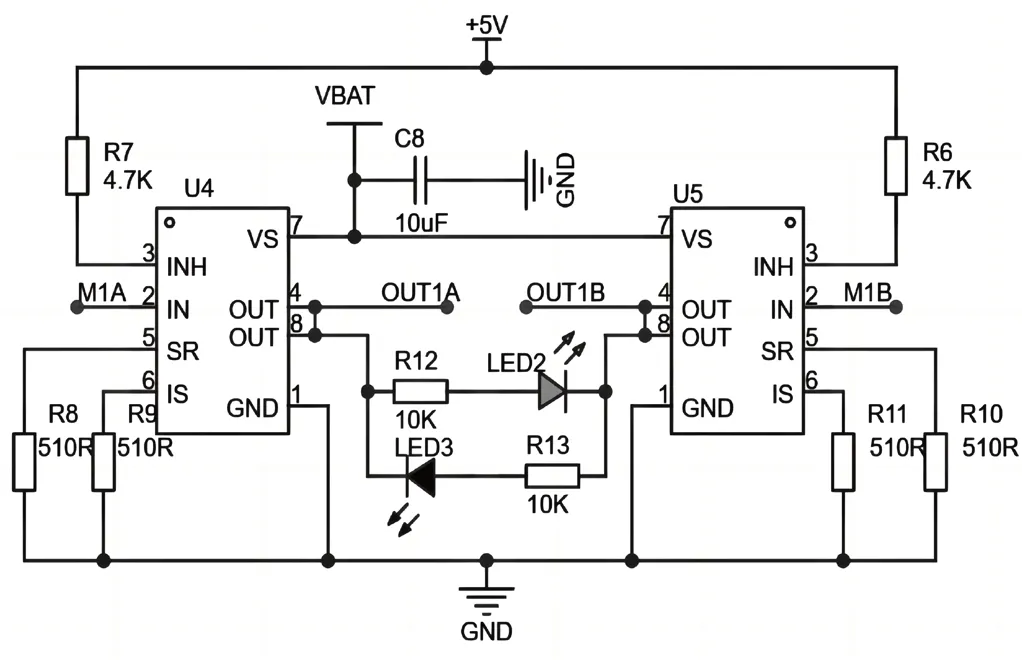
图2 直流电机驱动模块原理(部分)
2.3 定位模块
机器人采用ATGM332D 定位模块,支持北斗和GPS 等多种卫星导航系统。该模块通过测量已知空间位置的卫星到机器人接收机的距离和角度,综合卫星数据计算机器人具体位置。此外,通过串口连接可查看定位数据,包括定位时间、纬度、经度、高度和所用卫星数等。
2.4 传感器
机器人的主要传感器为分布在机体外部各处的红外光电传感器。该类型传感器是一种集发射与接收于一体的红外光漫反射式光电传感器[4],5 V 供电,最大检测距离为80 cm,受可见光影响较小,通过发射和接收红外光线检测物体存在,并向上位机输出信号。同时,搭载VL53L0X 激光测距模块,该脉冲式激光测距的原理和过程是测距仪器发射出的激光经被测物体反射后由接收端接收回射激光,测距仪器记录激光往返时间[5]。测距范围为30 mm~2 000 mm,采用脉冲式激光测距原理。机器人采用连续测量模式,实现连续测距并在每次测量结束后自动执行下一次测量任务。
3 程序设计
3.1 定位与导航系统
定位功能主要由ATGM332D 定位模块实现,同时,机器人上搭载一块LCD 显示屏用于显示相关定位信息。在启动定位程序前,控制系统首先打开串口,实时接收由ATGM332D 定位模块循环发送的数据帧,按需求使用strstr 函数从中选取字段(定位数据),以此获得相关信息并显示在LCD屏上。
根据NMEA-0183 协议,定位模块共循环发送GPGGA、GPGSA、GPGSV、GPGLL、GPRMC 以及GPVTG 这6 种数据帧,其分别代表不同信息,如表1所示。
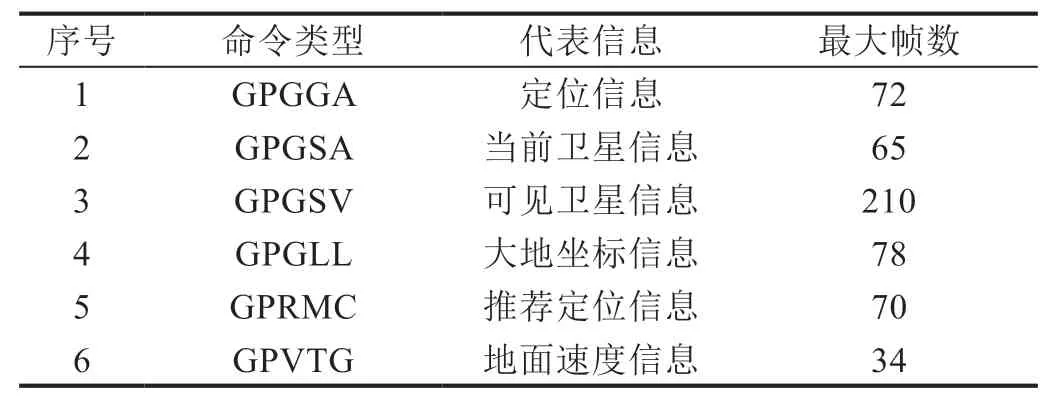
表1 数据帧信息
该机器人主要使用代表定位信息的GPGGA 数据帧。对于单一GPGGA 数据帧,除去帧头外共含有15 个字段,分别代表各种定位数据,包括世界时间(UTC)、经度、纬度、高度等[6]。其中,不同字段之间由逗号相隔,因此可使用逗号作为标记符,通过统计逗号出现的次数,获取相关顺序的字段,并在程序上通过strstr 函数进行查找与选取,得到相应的定位数据,如:GPGGA 数据帧的第二与第四字段分别为纬度与经度数据[7],通过strstr 函数查找“2”和“4”即可获得机器人当前经纬度信息。但定位模块会受到卫星信号强弱的影响,信号较弱时容易发出错误的定位信息,此时引入GPRMC 数据帧,利用strstr 函数查找其第二字段,若字段中含有“V”字符,则判定本次数据为无效数据。该机器人实现定位功能的相关程序流程如图3所示。
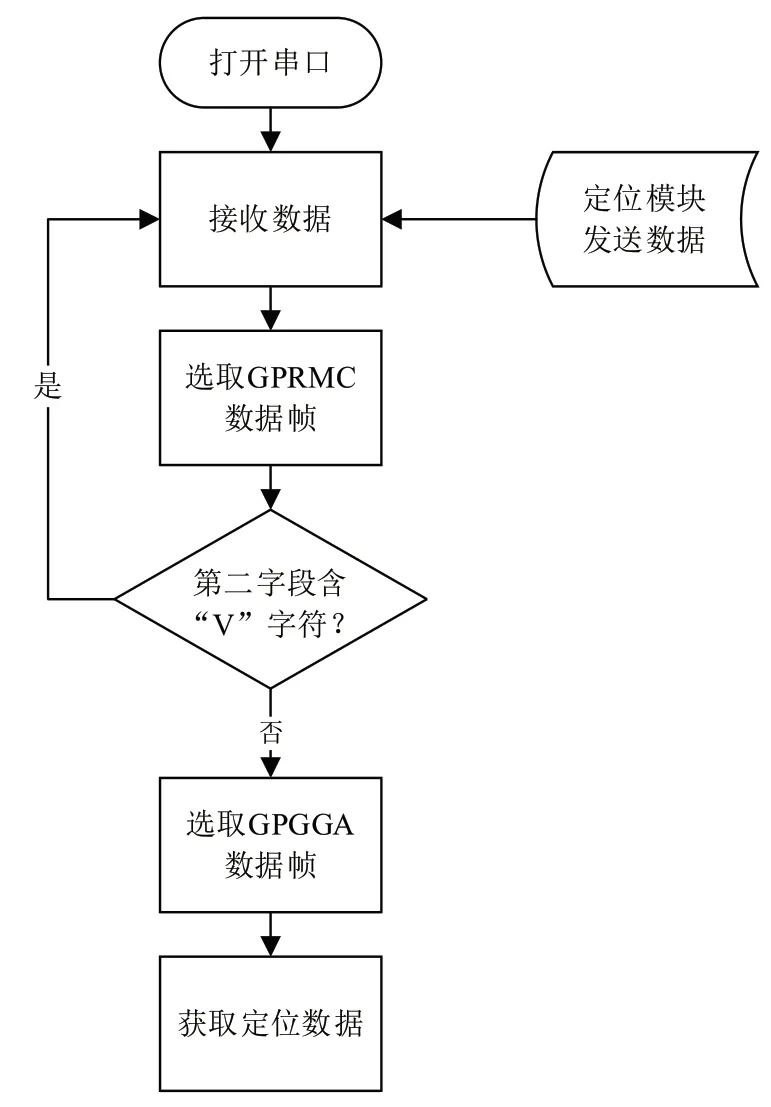
图3 定位程序流程
在实现导航功能前,控制系统中会预先设置多条固定的配送路径,由负责配送的工作人员进行选择。其中每条预设路径包含多个路径节点,分布在道路的十字路口、转弯处、直行处以及宿舍楼门前,每个节点都有各自的坐标,包含高度以及经纬度,同时,所有的路径节点会按照固定顺序进行排列。以广东海洋大学湖光校区的西区学生公寓为例,预设路径如图4所示。
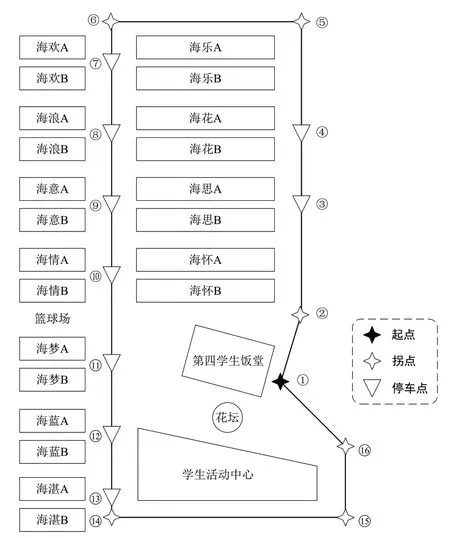
图4 预设路径
在机器人到达当前路径节点后,控制系统通过定位系统中获取的定位信息与下一路径节点的坐标值进行比较,获得经纬度预设值和实际值之间的偏差值,然后通过两个偏差值得出转向角度,再对数值进行取整,控制机器人两侧电机按照一定延时反转,在转向达到相应角度后,执行直行程序。偏差值与转向角度关系如式(1)所示:
式中,θ为确定转向角度,X为纬度偏差值,Y为经度偏差值。
控制系统每隔3 s 进行一次角度修正,而在机器人直行过程中,会利用摄像头以及分布在机体各处的传感器进行紧急避障,包括刹车和避让等,避开行人、行车和各种障碍物,然后再重新进行一次角度修正。与使用激光雷达或者视觉建模进行定位相比,该定位方式可以减少数据处理量,同时降低控制算法复杂性,在保证满足定位需求的同时可大大降低开发成本[8]。
3.2 图像识别与处理
该设计的视觉识别系统包括一个360°旋转的摄像头、树莓派4B 微型电脑板和内部运行的OpenCV。在配送任务执行过程中,摄像头持续捕获周围环境的图像信息,树莓派4B 使用OpenCV 库对图像进行识别和分析。识别得到的环境图像数据被传递给下位机的STM32 单片机,实现对障碍物的精准识别。机器人图形识别与数据分析思路如图5所示。
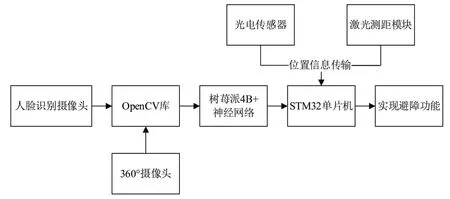
图5 机器人图形识别与数据分析思路
该机器人使用的OpenCV 数字图像处理技术可以很方便地对图像进行采集、底层处理,为周围物体的识别和取件时的人脸识别功能提供高质量的图像[9]。该机器人具备的人脸识别功能,是先利用摄像头进行视频采集,转换成静态帧信号;对每一帧利用OpenCV 进行图片预处理,然后进行人脸检测,识别人脸位置,得到边框数据;将待比对的图像进行特征提取以及人脸库的预提取,用于之后的比对[10]。人脸识别功能不仅提高了机器人的身份认证准确性和识别效率,还增强了机器人送餐过程的安全性。
机器人的图像数据传输和处理主要依赖树莓派4B微型电脑板。树莓派4B可编写和运行代码,是嵌入式深度学习的理想平台[11]。它负责收集、计算、分析摄像头和传感器的识别数据,确定障碍物的大小和位置,并通过串口通信将检测结果传递给下位机STM32单片机,控制系统依此实现机器人的避障功能。
3.3 电机控制
在面对坡路时,机器人电机的固定功率输出可能导致动力分配不合理,使机器人无法正常上下坡,甚至失控溜车。这是因为地球引力在运动方向上会对机器人造成影响。针对上述情况,本设计基于PWM控制方式,引入了PID 算法。PWM 通过改变占空比来控制电机转速,在上坡时增加电机电压以加速上升,在下坡时降低电机电压,利用电机的牵引力减速下行。通过调节PID 参数,实现机器人在坡路和平路上的匀速行驶,且设计的PID 控制算法通过仿真模型进行了验证。机器人PID 控制算法的仿真模型如图6所示。
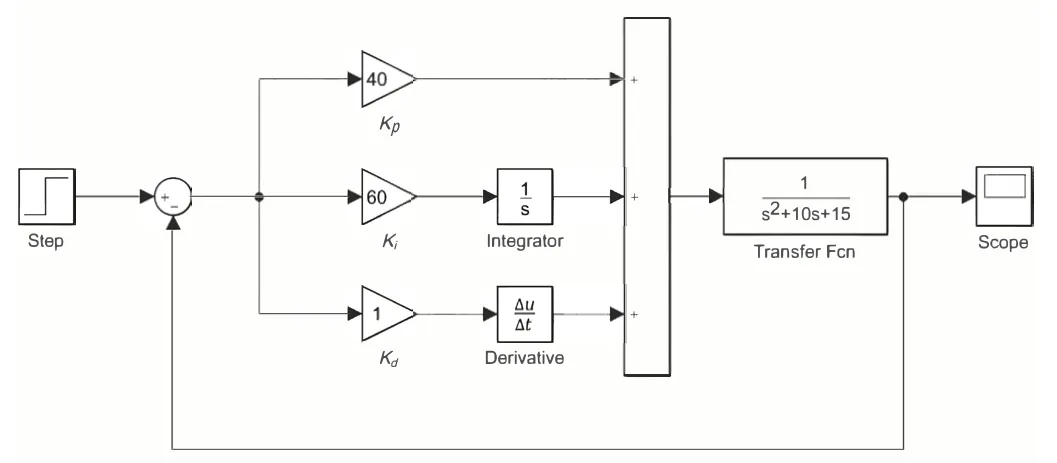
图6 PID 控制算法仿真模型
该机器人使用的是位置式PID 算法,PID 的本质就是非线性的控制,在机器人的应用中一般表现在单片机的控制上,这是一种进行过量化的过程,对于运行轨迹偏差不断采样并进行量的控制。因此本质上也是数字控制的一种[12],其基本数学公式如式(2)所示。
式中,u(t)是算法的输出信号,e(t)是偏差值,Kp是比例增益参数,Ki是积分增益参数,Kd是微分增益参数。
积分增益的作用在于消除系统的静态误差,使系统能够逐渐趋近目标值并最终消除稳态误差。其大小影响着积分的速度和效果,过大的积分增益可能导致系统振荡。另外,积分增益还有助于减小系统的动态误差,提高系统的调节速度,从而减少超调和振荡。
4 结论
本文介绍了一款专为高校校园内饮食配送服务设计的智能配送机器人,该机器人具备室外工作能力,主体结构防雨,储物结构能保护和保温食品,硬件性能稳定可靠。为解决实际问题,采用固定路径和路径节点的自主导航系统,确保机器人按预定路径精准配送。同时,引入摄像头和树莓派微型电脑,结合OpenCV 库实现智能感知和判断,避免障碍物碰撞,提高配送精准度。在处理机器人上下坡平衡问题时,引入PID 算法进行精确控制,确保机器人在各种坡度上稳定通过,保障配送过程的安全性和稳定性。
