基于人工智能算法的农业机械自动化控制方法研究
2024-04-26宋鹏
宋 鹏
(贵州省机械电子产品质量检验检测院,贵州 贵阳 550014)
随着科技的发展,人工智能技术在农业机械控制领域得到了越来越广泛的应用,我国是农业大国,农业机械化水平的提高对于保障国家粮食安全、促进农业现代化具有重要意义[1]。然而目前我国农业机械控制方式仍以手动操作为主,自动化程度较低,不仅耗费大量人力物力,也无法实现精细化管理。为实现农业机械的自动化、智能化,开展农业机械自动控制技术研究迫在眉睫。人工智能技术是实现农业机械自动化控制的关键技术之一。基于感知、学习、决策等功能,人工智能可以根据作物生长环境的变化来调整控制参数,实现对农业机械的闭环控制。本文针对常见的农业机械,研究设计了基于人工智能算法的自动化控制系统,该控制系统能够实现对作业过程的感知及决策调整,具有一定的智能性、灵活性和适应性。
1 人工智能算法在农业机械控制中的基本原理
人工智能算法实现农业机械自动化控制的核心在于环境感知与智能决策[2]。典型的方法是构建标定模型,实时获取各种作业参数,经过分析计算后对设备的状态和作业过程进行评估与决策。例如,在拖拉机自动导航系统中,需要获取导航定位模块输出的机器人姿态、GPS 坐标、里程计数据、惯性测量数据等,同时获取图像识别模块对田间作物和地形的分析结果,根据标定模型计算出最优路径,并将运动控制量和作业参数下发执行,完成田间作业。具体来说,人工智能算法的环境感知主要通过传感器获取各类数据信号,例如距离传感器、导航传感器可以实时监测周围的障碍物和地形;温湿度传感器、光照传感器可以感知外界的环境参数;载荷传感器可以测试装载质量;质构传感器可以分析土壤成分比例等。这些传感数据经过标定换算,可以精确反映作业环境的状态。然后,算法会对数据进行多元分析,提取关键特征,判断当前的作业环境与模式,预测可能的异常情况。例如,如果测得温度过高、光照过强,那么算法会提前判断可能出现的作物枯萎或其他情况,根据优化模型准备相应的控制策略。在环境分析的基础上,人工智能算法最核心的功能就是智能决策[3]。决策系统综合考量作业目标、环境状态、机械负荷等多种因素,计算出最优的控制参数组合,并将其转换为运动学控制量,实现对农业机械的闭环控制。决策系统还具有自我迭代和持续学习的能力,它会根据执行结果不断完善和增强控制模型,以适应复杂多变的农业环境,实现智能化、精确化、自动化控制。
2 基于人工智能算法的农业机械自动化控制系统设计与实现
2.1 控制系统整体架构设计
基于人工智能算法的农业机械自动化控制系统由传感层、网络层、计算层和应用层组成。传感层主要包括工况检测模块、环境检测模块等,通过各类传感器采集农业机械的工况数据、环境数据,并经过信号调理后输送到网络层[4];网络层主要实现不同传感器信号的融合,构建了控制总线,并将数据标准化后上传到计算层;计算层是核心决策层,集成了作业辅助决策系统、避碰导航系统、执行控制系统等算法模块。这些智能算法模块对传感数据进行深度分析,制定出控制策略;应用层将计算层的控制指令解码为电机的驱动信号、执行机构的开关信号等,最终驱动农业机械的运行。该系统总体采用分层约束的架构方式,下层的数据流主要是底层信号的采集和传输,上层则侧重于信息处理和决策控制。各层之间通过标准化网络互联,提高了系统的开放性和兼容性。同时,系统具有一定的容错能力和健壮性。如果某一传感器失效,不会影响其他传感器工作;如果局部网络中断,系统可以自主切换到降级工作模式,这保证了系统的高可靠性。
在具体实现中,传感层所使用的传感器类型有温湿度传感器、GPS 传感器、图像传感器、载荷力传感器、倾角传感器等,可以采集周围环境温度、湿度、定位、地形、作物和土壤特征等数据。网络层采用规范的CAN 总线(传输速率可达1 Mbps)进行数据传输,保证了实时性。计算层中的算法模块采用的是改进的LSTM 神经网络,可以处理时间序列,对历史数据进行训练审视,实现更准确的预测和决策。应用层将控制指令转换为PWM 驱动信号(频率可调,精度±0.5%),用以驱动水泵(流量范围0~100 L/min)、喷头(喷雾面积10 m2~100 m2)等执行机构,也可直接控制电机(功率范围2 kW~20 kW)、舵机(转角精度±0.1°)的运转,从而精确控制农业机械的自动化作业。
2.2 控制系统硬件设计
控制系统的硬件采用模块化设计,各组件通过标准接口互连,主要分为处理器模块、传感模组、执行模块、通信模块和稳压供电模块[5]。其中,处理器模块采用的是STM32F427 单片机,其Cortex-M4核心具有浮点运算单元和DSP 指令,运行主频高达180 MHz,片上SRAM 192 KB,能够有效支持神经网络算法模型的部署运行,满足控制算法的计算需求。图像处理采用的是卷积神经网络SoC 芯片,适用于图像识别及特征提取,可有效减轻主控MCU 的负载。传感模块集成了变速脉冲编码器,用于获取运行轴转速;还有噪声传感器,用于测量作业过程中的噪声水平。另外还有温度传感器、湿度传感器等,用于测量环境条件,防止机械过热或积水。这些传感参数会实时反映机械装置的动作和工况状态[6]。执行模块能够将控制指令转换为PWM 脉冲信号,进而驱动舵机、步进电机等执行机构,完成精确的运动控制。考虑到耐久性要求,输出驱动芯片采用了车规级芯片,能适应恶劣工作环境。通信模块支持CAN 总线、Wi-Fi 等标准通信接口。通过这些接口可以将传感器数据汇聚传输至计算单元;也可以将控制指令分发至执行模块,实现对各个执行机构的协调控制[7]。电源模块提供了宽温度范围、低噪声的稳压供电电路,输出电流高达20 A,可以为控制系统的各个部分提供清洁且稳定的电源。该电源系统还具备过流保护、过压保护、短路保护等功能,提升了系统的安全性和健壮性。
2.3 控制系统软件设计
控制系统软件分为操作系统层、算法框架层和应用接口层。操作系统层采用FreeRTOS 实时操作系统。它具有实时性、预置性、优先级管理等特性[8],可以根据控制算法和数据采集的需要灵活分配CPU资源和调度任务优先级,保证处理器高效稳定地运行。算法框架层实现了传感驱动模型、神经网络模型、优化求解器等组件。其中,传感驱动模型负责标准化各类传感数据,转换为训练模型的输入;神经网络模型(ResNet 结构,20 层深度)实现对作业环境的分析判断;优化求解器(采用贝叶斯超参数优化算法)则基于当前状态计算出最优控制策略。模型训练使用IoT 边缘计算平台,数据集来源于历史数据和模拟数据。数据库使用SQLite 数据库管理作业日志、环境数据等信息,便于算法框架的模型优化和决策的持续改进[9]。数据库采用索引结构,写入速度可达1 000 次/s,读取速度可达3 000 次/s。应用接口层通过OPC UA、MQTT 等协议,实现与底层硬件的标准互联,封装了通信驱动和功能驱动两个子层。底层通过CAN 总线、串口获取传感数据,上层可直接调用功能驱动层的方法,以实现对水泵流量、喷头模式等的控制。该软件系统具有模块间松耦合、可配置化的特点,兼具灵活性与可扩展性[10]。未来,可通过升级算法模型和新增应用驱动,实现对更多类型农业机械的智能化精确控制。
3 试验设计与结果分析
3.1 试验设计与实施
为验证所设计农业机械自动控制系统的性能,开展了测试验证试验。试验的目的是检验控制精度、作业质量以及系统稳定性。试验所使用的农业机械平台是某公司生产的八轮自走喷雾机器人。该机器人行走速度18 m/min,转弯半径小于20 m,喷孔数量36 个,配备特高压轴流泵,最大流量100 L/min,试验载药液为20%悬浮剂的百草枯水剂。试验区选择了某农场的标准试验田,面积为2 hm2,地形复杂性较低。在试验初期,对该自走喷雾机器人的喷雾性能和避障性能进行了测试,结果符合使用要求。接着,上传了经训练的自动导航与执行控制模型以及与特高压水泵匹配的闭环控制模型,启动智能控制模式下的试验。测试过程中,调整导航路径和执行策略,使液体最终覆盖率达到要求的98%以上,这表明导航定位精度和执行控制精度都比较高。在后期模拟异常情况的测试中,随机断开一个执行机构的控制信号,控制系统能够检测到异常,启动备用执行机构进行补偿操作,以保证作业质量。此外,通过调整环境参数,模拟了在不同光照条件、温度和作物叶面积下的试验,控制系统都能根据环境状态实时调整算法模型,自动校正执行策略,表现出了较强的适应性和稳定性。
3.2 试验结果分析与讨论
通过对试验过程的观测分析,总结了自动控制模式下系统的主要性能,如表1所示。
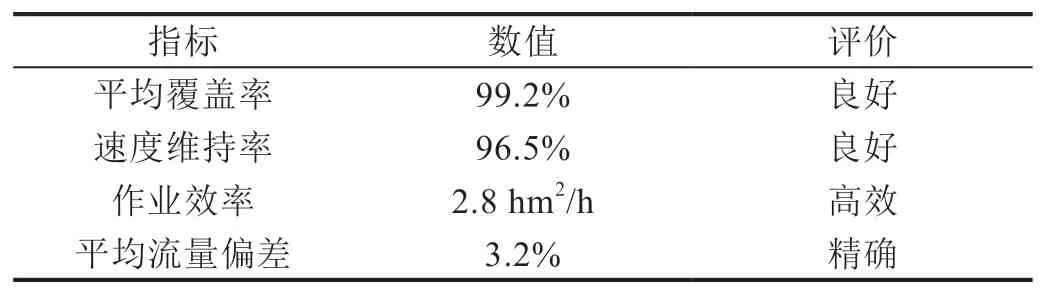
表1 自动控制模式下的主要性能指标
从表中可以看出,在自动驾驶与执行控制模式下,喷雾机器人实现了较高的悬浮剂覆盖率,达到99.2%,且导航速度只有少部分时间下降,基本维持在设计值(96.5%),这说明定位导航足够精确,遍历覆盖效果好。由于导航路径和速度控制比较理想,平均作业效率达到2.8 hm2/h,大大提高了作业效率。另外,特高压泵的流量控制也比较准确,控制精度为±3.2%,在可接受的范围内。与手动控制模式相比,该智能化控制系统自动适应环境,无需人工干预,效率更高。试验期间,当随机断开一个喷雾执行机构后,系统快速启动了备用机构工作,未出现明显的混淆,这表明系统在复杂环境下也能保证稳定性。通过试验验证,所设计的基于多源异构数据融合的农业机器人自动控制系统,能够实现精确的作业控制,具有环境适应性强、控制精度高的特点,满足了智能化农业装备的自动控制需求。
4 结语
本文针对农业机械的自动化控制需求,研究设计了一套基于多源异构数据融合与人工智能算法的智能化控制系统。该系统通过环境监测与智能决策实现了对农业机械的闭环控制,试验结果表明,该系统具有控制精度高、适应性强的优点。可见,人工智能技术为实现农业机械的智能化、精细化控制提供了有效手段。随着传感技术、通信技术与算法模型的不断优化,人工智能技术将在更多农业机械的设计与应用中发挥重要作用,有助于减轻农民的劳动强度,提高农业生产效率。当前,该智能控制系统主要应用于单机种的定向作业,未来,可尝试建立统一的作业指挥平台,实现多机种协同与优化调度,形成完整的数字化、网络化农机系统,推动我国农业整体的智能化与现代化进程。
