高分七号卫星双线阵相机几何处理及其精度验证
2024-04-17李对对隋正伟龙小祥李庆鹏乔志远钟慧敏王小燕
李对对,隋正伟,龙小祥,李庆鹏,乔志远,钟慧敏,王小燕
1.中国资源卫星应用中心,北京 100094;
2.中国四维测绘技术有限公司,北京 100048
1 引言
高分七号卫星工程是国家高分辨率对地观测系统重大专项的重要组成部分,用于获取高空间分辨率立体测绘遥感数据和高精度激光测高数据。高分七号卫星可以满足中国1∶1万立体测图需求,大幅提高了中国对地理信息数据的获取能力,推动了国家测绘事业的发展(周平,2016)。高分七号卫星搭载了双线阵立体相机、激光测高仪等有效载荷,其主载荷双线阵相机由线阵推扫相机组成,分别为前视相机和后视相机,前视全色相机星下分辨率为0.79 m,后视全色相机分辨率为0.64 m,后视多光谱相机分辨率为2.58 m。高分七号的前后视相机可以获得亚米级空间分辨率的图像,激光测高仪还可以获得高精度的高程信息,两种载荷相互结合可以得到高精度的数字高程模型(孙立等,2020)。除此之外,高分七号卫星首次采用国内首套星图融合星敏传感器,进行双星敏传感器的夹角修正,可大幅度提高卫星姿态确定精度。
目前主流的光学卫星均采用线阵推扫成像模式,这种成像方式拥有不同的投影中心和外方位元素。因此需要采用一定的几何模型对成像几何进行描述,影像的高精度定向往往需要通过区域网平差技术实现(Toutin,2004,Poli,2005,Tang和Xie,2012)。
近年来,国内卫星技术飞速发展,卫星定轨技术得到了空间的进步,主流的技术基于双频GPS的精密定轨技术空前的提高了卫星的几何精度得到了空前发展。这些因素使得WESTIN(Westin,1990)、Yoon(Yoon,2009)、Teo(Teo等,2010)等采用星上的姿态数据和轨道数据进行建模,构建卫星的外方位元素,然后利用控制点进行平差修改误差。这种严密几何成像模型的区域网平差技术大大提高了卫星的操作性,得到了广泛应用,然后它具有一个缺点,当卫星焦距足够长时,会发生类似平行投影的现象,这种模型无法在这种场景得到应用,会造成平差结果的不稳定性。
通过卫星的内、外方位元素构建方程,可以建立像点坐标和空间坐标之间的关系,然而也公开卫星的成像的几何原理和卫星部分参数,不利于广泛应用。为了简化卫星影像的处理与应用,高分七号采用通用的几何模型(Hall 和Murayama,1995)。Grodecki和Dial(2003)通过IKONOS影像的区域网平差表明了通用几何模型和严密几何模型在精度和平差稳定性都达到同样的水准。
2 高分七号几何模型构建
2.1 多平台多相机严密几何模型构建
相比较于传统的严密几何模型,平台上各个相机之间的成像过程是相互独立的,即各相机同时对不同地物成像,并没有考虑卫星上相机间的相对关系。然而随着卫星技术的发展与应用,卫星搭载多个平台多个相机已成为一种趋势。除此之外各用户为了满足数据的融合和跨视场数据的拼接使用,对卫星上不同相机间的相对精度要求越来越高。高分七号搭载的前后视全色相机的分辨率都达到了亚米级,前后视影像的相对精度对后期制作高精度数字高程模型DEM(Digital Elevation Model)具有至关重要的意义。因此,必须建立基于统一平台的严格几何成像模型,从而保证平台内部相机之间、相机内部传感器与传感器之间的相对几何精度(王智等,2010)。
利用同一平台内不同相机、传感器在同一成像时间时外方位元素不变的特性(李德仁等,2006),高分七号通过引入统一时间系统、统一姿态轨道模型,建立了基于统一平台的严密几何模型。对于高分七号卫星前视后视两个相机而言,相机坐标系下的像点坐标经过坐标旋转和原点平移转换成卫星本体坐标下的对应S 坐标可表示为
式中,[dxdydz]T表示相机坐标系原点相对于本体坐标系原点在3 个方向的平移量,表示相机坐标系转换到本体坐标系的旋转矩阵(包含高分七号卫星前后视的夹角)。利用、用CCD 探元指向角ψx,ψy表示内方位元素,则可简化为
经过严密几何模型分析卫星上各相机成像时的几何特点,提出了通过引入平台统一时间系统的方法,从而建立统一平台的严格成像模型:
2.2 姿轨数据处理模型构建
高分七号卫星利用双线阵相机完成地面推扫成像,形成两幅具有一定视角且相互重叠的双线阵航带影像。利用星敏感器和其他姿态测量部件完成卫星姿态的测量,获得绝对位置,如图1所示,前视相机和后视相机线阵阵列安装时两者处理平行排列,在轨运行时垂直于飞行方向,在不同时刻分别针对地面条带成像(杨居奎等,2020)。

图1 高分七号双线阵相机在轨运行图Fig.1 On-orbit operation diagram of GF-7 dual-line array camera
利用离散的的轨道测量数据建立数学模型。可以获得任意成像时刻的轨道参数数据。由于卫星实际运行过程中由于受到地球中心引力之外的多种摄动力的影响而偏离开普勒轨道(唐新明等,2012),针对高分七号卫星轨道参数及轨道测量频率,可以理解为在较短的成像时间t时刻内,卫星轨道是一个平稳运行的平滑轨道,因此可以采用拉格朗日多项式进行轨道拟合:
式中,XP,YP,ZP为卫星轨道多项式模型,ai,bi,ci为多项式系数,t为卫星较短的成像时刻。二次多项式模型将卫星轨道近似为椭圆,可以用来检测外方位元素的变化。利用拉格朗日多项式进行轨道拟合可以避免高阶震荡现象。卫星外方位元素的内插模型可以表示为
式中,P(ti)为卫星位置信息。V(ti)为卫星速度,ti为卫星位置和速度对应的时间。
高分七号首次采用星图融合星敏传感器,大大提高了卫星的定姿定轨精度,针对这种新的设备组合,高分七号采用了联合定姿的处理方案。敏感器是目前姿态测量精度做高的设备,而陀螺仪可以同时测量姿态和姿态变化的参数(Rawashdeh等,2012)。具体流程可以简化为如图2所示。

图2 高分七号姿态数据处理流程Fig.2 GF-7 posture data processing flow
根据卫星姿态的唯一性,可选取多个星敏感器中的一个为基准,根据星敏器两两光轴之间的夹角关系,使得星敏感器系统具有统一的基准。
式中,t时刻星敏感器1 三轴在惯性坐标系下的坐标t时刻星敏感器2 三轴在惯性坐标系下的坐标如果已知其中一个星敏的安装矩阵为就可以得到其他两个星敏相对于本体的安装矩阵
假设多个星敏器光轴在惯性坐标系下的矢量坐标为V1CIS,V2CIS,…,VnCIS,在卫星本体坐标可表示为V1Body,V2Body,…,VnBody,星敏感器的观测方程为
需要注意的是本体坐标系到惯性坐标系的旋转矩阵(或四元数)的求解方法很多,在只有两个星敏感器的情况下,是可以唯一确定一组旋转矩阵的。当星敏数量有3个或更多时,产生多余观测,需采用最小二乘平差方法计算旋转矩阵四元数。
2.3 高分七号有理函数模型
通用几何模型利用比值多项式来拟合像方坐标系和物方坐标系之间的转换关系,可以表示为
式中,P,L,H为地面坐标系统,X,Y为图像的影像坐标。根据(Tao 和Hu,2001)可以求解有理多项式模型参数,同时根据该影响的覆盖范围提取对应的DEM 数据。由DEM 数据可以计算出高分七号影像区域的最大最小椭球高。在高程上会生成一定的间隔层,平面上,以一定的网格大小建立地面规格网格,生成控制点地面坐标,通过传感器的严密几何模型公式,最后计算控制点的影像坐标。
3 双线阵相机在轨几何检校
影像高分七号卫星双线阵相机影像内部几何精度和外部定位精度的因素有很多,例如卫星轨道、姿态的测量误差、卫星经过发射和在轨运行的空间环境、各类传感器与卫星平台之间的安装误差、相机的畸变误差等(胡堃,2016)。因此,需要对双线阵相机前视全色和后视全色多光谱传感器进行在轨几何检校,获取传感器的内方位元素以及畸变差,从而改正高分七号卫星影像的内部畸变;同时获取相机不同谱段成像之间的几何关系,修正不同谱段成像的几何定向偏差,提高不同谱段成像间的相对几何精度即提高不同谱段之间的波段配准精度。对卫星平台外方位元素进行检校,获取卫星平台上相机视轴指向与姿态轨道系统的系统长周期偏差、复杂环境下系统误差随时间变化的关系模型,修正卫星直接几何定位时的相关长周期与短周期偏差,提高高分七号卫星前视全色和后视全色多光谱影像的几何定位精度。
针对在轨成像中高分七号卫星及其有效载荷指向的变化,一方面需要精确检校在轨相机的几何畸变曲线。另一方面获取载荷中每个CCD 成像探元的精确光线指向,为高精度标准影像产品生产提供精确内方位几何元素,保证卫星影像产品的内部几何精度。
高分七号卫星线阵相机的几何参数检校重点在于确定检校的参数和几何模型。首先选择合适的单景待检校数据,输入同一地区的高精度DSM和DOM 以及参考的卫星影像图像数据,用DOM及参考的卫星图像模拟出中心投影影像,与待检校影像做密集匹配,根据密集匹配结果点构建几何模型,然后进行检校参数的解算与精度评价。其中精度控制主要取决于控制点的自动量测、严格几何检校模型的构建和精确指向角参数的解算。
高分七号双线阵相机待检测数据产品号为40743,成像于2020年1月21日,侧摆角为1.93°,地形为丘陵。数据位置图3所示。用于高精度内方位检校场数据位于大连市,为多角度倾斜摄影获取的真正射影像,DOM(数字正射模型)产品分辨率0.08 m,DEM(数字高程模型)产品格网大小0.15 m,平面几何精度优于0.15 m,高程几何精度优于0.2 m,平地、丘陵地、山地均满足,限差优于3 倍中误差,数据幅宽东西向120 km,南北向11 km。

图3 高分七号卫星内部几何检校测试数据Fig.3 Test data of internal geometry calibration of GF-7
综合标定高分七号卫星在轨测试及运行期间的卫星平台的外方位元素模型,获取高分七号卫星姿态系统指向与相机指向的几何关系,为影像的高精度几何定位提供精确外方位几何元素模型,保证影像产品的无控几何定位精度。具体步骤如图4所示。具体步骤概括如下:

图4 高分七号内部几何检校步骤Fig.4 Steps for internal geometry calibration of GF-7
(1)控制点高精度自动量测与匹配处理,对待检校数据和高精度参考影像进行自动匹配,提取同名点;
(2)分布迭代求解方案计算卫星内外定标系数;
(3)针对不同相关性,通过数学分析、几何处理的方法对待定标系数进行不同处理。设置不同权重,在平差中对不同级别赋予不同的权重系数,利用基于验后定权的广义最小二乘平差技术,提高了几何精度和平差稳定性;
(4)分析像方残差和定标系数之间的积分关系,针对不同的定标系数,确立不同的控制点分布策略;
(5)在卫星推扫过程中,不同行之间的探元之间存在不同的角度关系,以此作为控制信息,可以消除卫星的系统误差,使得解算精度提高。
在轨几何检校后,双线阵相机FWDPAN(前视全色影像),BWPAN(后视全色影像),BWDMUX(后视多光谱影像)线阵方向和垂直于线阵方向误差的均值和方差分别如表1、表2、表3示。
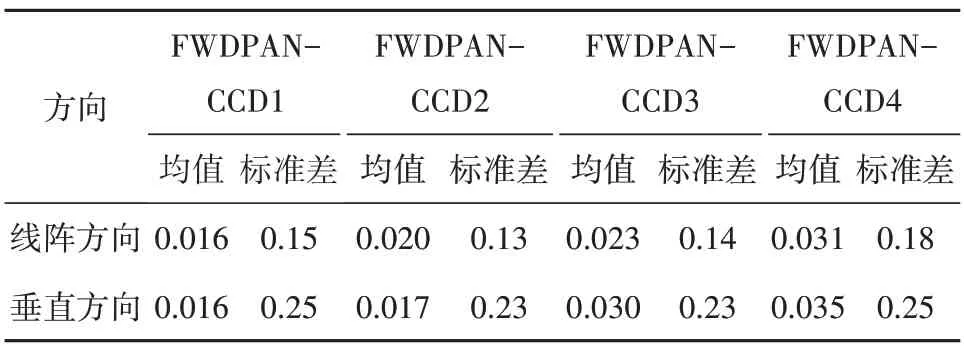
表1 双线阵相机FWDPAN相机几何检校精度分析Table 1 Analysis on the accuracy of geometrical calibration of FWDPAN dual-line scan camera

表2 双线阵相机BWDPAN相机几何检校精度分析Table 2 Analysis on the accuracy of geometrical calibration of BWDPAN dual-line scan camera
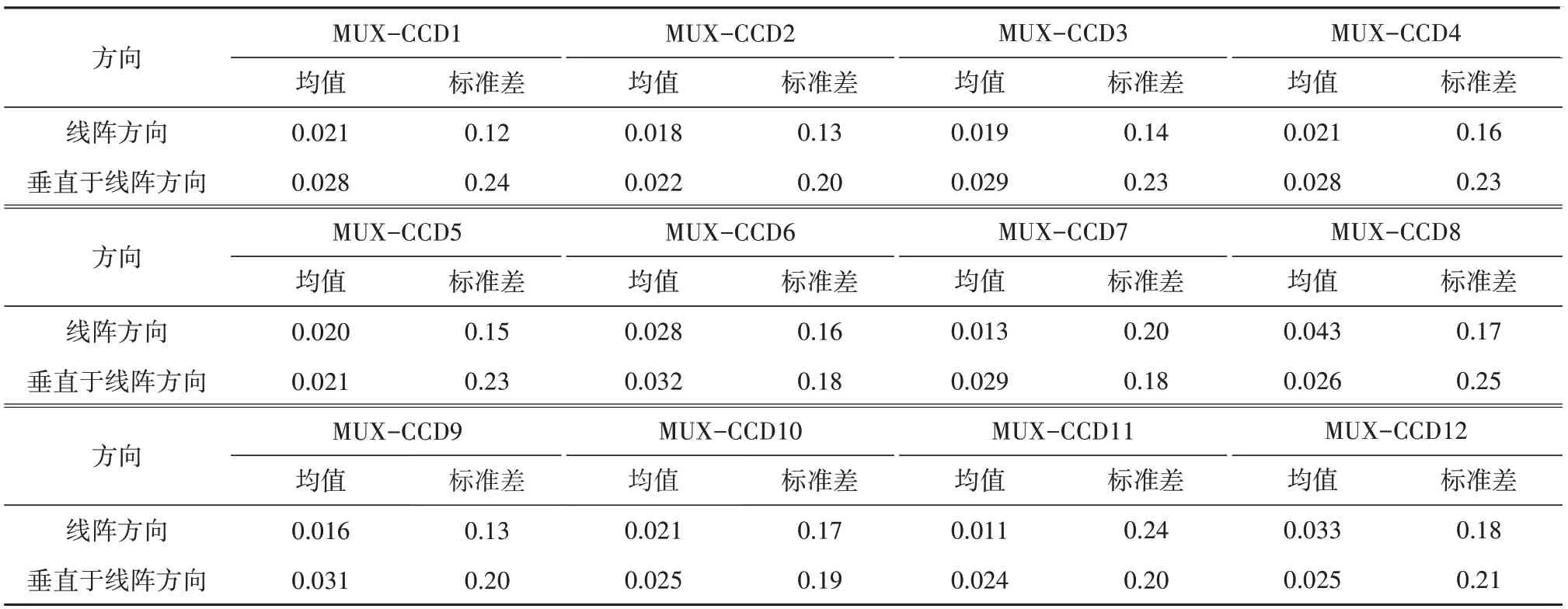
表3 双线阵相机MUX相机几何检校精度分析Table 3 Analysis on the accuracy of geometrical calibration of MUX dual-line scan camera
通过检校后垂直于线阵方向和线阵方向残差分布说明在轨几何检校后双线阵相机几何畸变得到了有效补偿。
双线阵相机检校后垂直于线阵方向误差略低于线阵方向,是由于线阵方向为刚性结构,而垂直于线阵方向(飞行方向)受卫星平台震颤、平台稳定性、姿态控制精度等因素影响。基于大连真正射高精度几何检校场数据对高分七号前视全色相机、后视全色相机、后视多光谱相机的内外方位元素在轨几何检校(蒋永华等,2013)。前视全色相机、后视全色相机、后视多光谱相机线阵方向和垂直于线阵方向在轨几何检校精度均优于0.28个像素左右。
4 高分七号几何精度分析
4.1 高分七号卫星无控几何精度验证
几何精度指经过几何校正后的图像上地理位置和真实位置之间的差异。有两种定义,一是待检测影像与真实地理位置的整体偏差,二是待检测影像中心像素与真实地理位置的差异,无控几何精度检验步骤如图5所示,可以概括为

图5 高分七号无控定位精度测试步骤Fig.5 Test steps for uncontrolled positioning accuracy of GF-7
(1)进行控制点自动量测,根据待评测影像、参考影像(参考影像自动提取与加载模块提取的DOM、DEM)的灰度信息,采用特征提取、金字塔粗匹配、最小二乘精匹配相结合的策略在物方进行影像配准,保证每景影像获取均匀分布的70 个以上控制点。
(2)计算控制点在待测图像和参考图像的实际地理坐标差值的均值作为该景图像的无控物方几何定位精度;利用严格几何成像模型或RPC(有理化模型)模型采用后方交会计算控制点焦平面上像点残差的均值作为该景图像的无控像方几何定位精度。
高分七号双线阵相机平面几何精度测试数据统计了2020年2月4日至2020年5月2日共11景数据,数据分布如图6所示。参考影像采用全国范围内1∶1万精度参考数据、10 m精度DEM数据。全色和多光谱的几何精度检测结果如下表4、表5和表6所示。通过对高分七号十景影像的几何定位测量,经过几何处理后卫星的平面定位精度在6 m左右。

表4 高分七号卫星前视全色相机图像产品无控几何定位精度测试表Table 4 GF-7 satellite front-view panchromatic camera image product uncontrolled geometric positioning accuracy test table

表5 高分七号卫星后视全色相机图像产品无控几何定位精度测试表Table 5 GF-7 satellite rear-view panchromatic camera image product uncontrolled geometric positioning accuracy test table
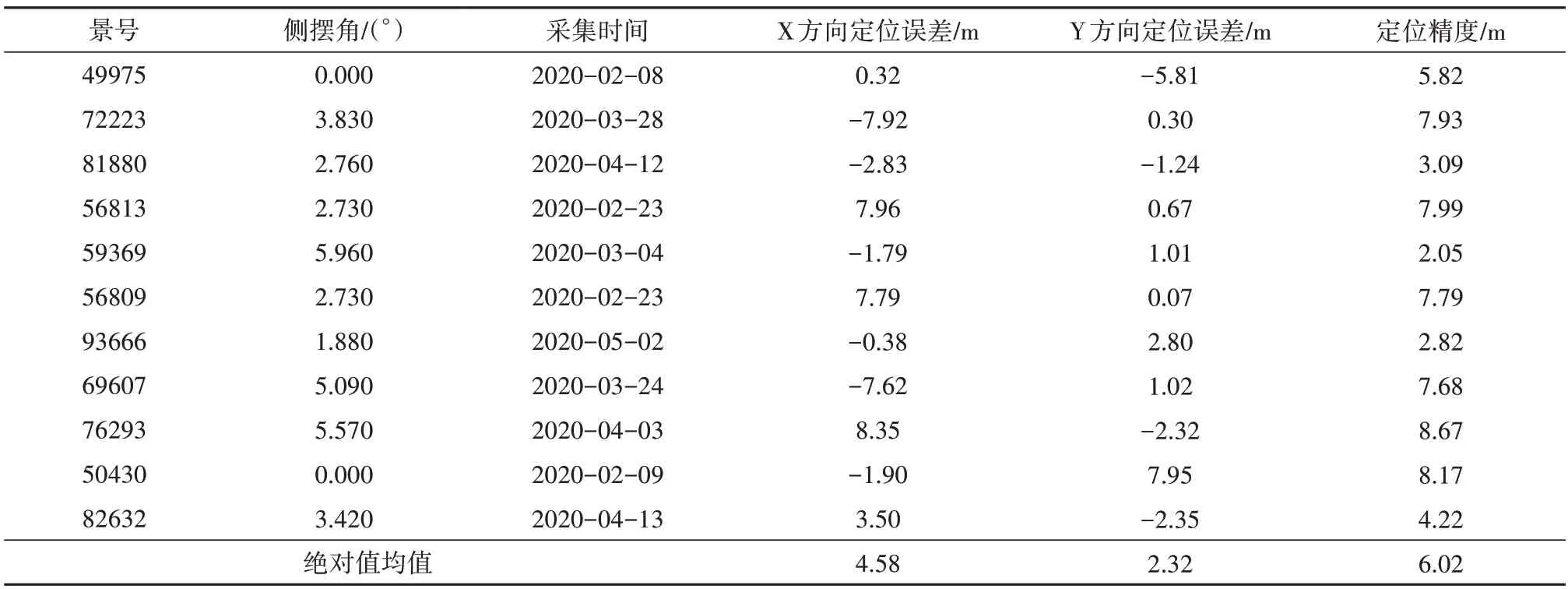
表6 高分七号卫星后视多光谱相机图像产品无控几何定位精度测试表Table 6 Test table for uncontrolled geometric positioning accuracy of GF-7 rear-view multispectral camera image products

图6 高分七号卫星无控定位精度测试数据Fig.6 Test data of uncontrolled positioning accuracy of GF-7
4.2 高分七号立体测绘产品精度验证
立体测绘产品精度指经过不同数量控制点精几何校正后的立体像对图像上地理位置(经纬度和高程)和真实位置之间的差异。本次测试,高分七号卫星采用河北唐山周边2020年4月3日成像数据(图7),侧摆角5.57(°),产品为GF7_DLC_E118.4_N40.0_20200403_L1A0000075762。

图7 高分七号检测影像Fig.7 GF-7 inspection image
参考数据采用高精度基础数据和外业地面实测点进行验证,高精度基础数据采用几何精度优于1∶2000 的DOM 影像和格网和大地高精度均优于5 m 的DEM 数据,外业地面实测点采用均匀分布于影像上的71 个地面控制点(平面和高程精度均优于0.1 m),具体流程图8 所示。具体步骤可以概括为

图8 高分七号立体几何精度验证步骤Fig.8 Steps to verify the accuracy of the three-dimensional geometry of GF-7
(1)自动查找参考图像,并对其进行投影转换、镶嵌等处理。
(2)以高精度定标场参考DOM 和DEM 为基准,进行高精度控制点的人工量测。
(3)利用不同数量控制点,采用基于严格成像模型或RPC 模型自适应平差技术进行平差处理,消除待检测影像与参考影像间的几何定位误差。
(4)在平差处理后的影像上,进行控制点自动量测,根据待评测影像、参考影像(参考影像自动提取与加载模块提取的DOM、DEM)的灰度信息,采用特征提取、金字塔粗匹配、最小二乘精匹配相结合的策略在物方进行影像配准,每景影像获取均匀分布的49个以上检查点。
(5)利用所量测的控制点信息,基于严格几何成像模型或RPC模型进行严格后方交会,并对控制点的像方残差进行分析。
(6)得到影像内部几何精度与控制点数量、纠正模型(仿射变化、多项式、样条)的关系。
GF7_DLC_E118.4_N40.0_20200403_L1A00000 75762 有控制下几何精度分析,通过利用外业实测的71 个高精度控制点数据,分别利用1、5、9 个控制点进行刚性平移变化校正,其余控制点作为检查点。选择的控制点的分布情况分别如图9所示。

图9 高分七号检测影像控制点位置Fig.9 GF-7 detects the position of image control points
经过精度验证发现(表7):在1 个控制点下,高分七号卫星的平面几何残差在3 m左右,高程精度在1.1 m 左右,在5 个或9 个控制点下,几何残差有了明显的改善,平面几何残差在1.4 m 左右,高程残差在0.86 m左右。
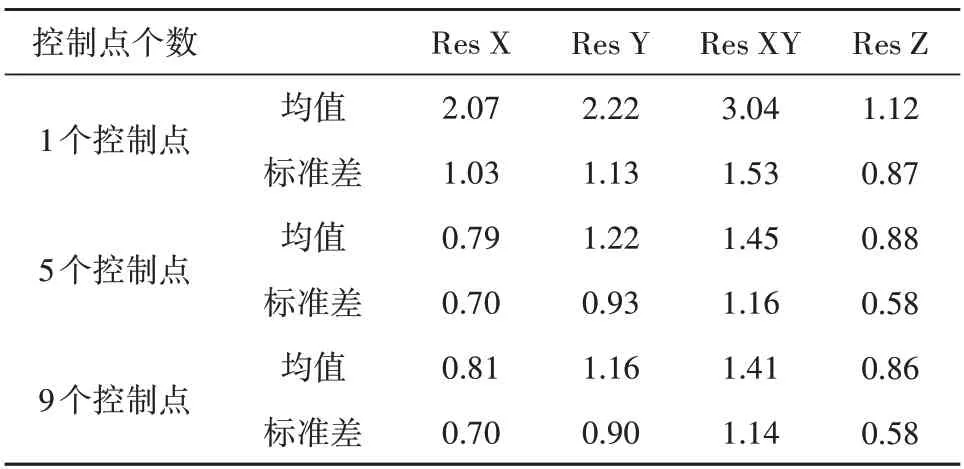
表7 高分七号卫星立体测量几何定位精度测试表Table 7 GF-7 satellite stereo measurement geometric positioning accuracy test table
5 结论
本文主要结合高分七号双线阵相机的载荷设计特点,在卫星数据处理系统建设实践经验的基础上,有针对性的研究高分七号卫星结合处理的关键技术与方法,完善高分辨率光学卫星影像几何处理领域的研究体系。概括起来,本文的主要创新点包含两个方面,基于多平台多相机构建统一平台的严密几何模型、基于卫星的星图融合星敏传感器,采用多星敏组合定姿方式构建卫星的姿轨处理模型。最后通过大量的数据进行精度验证,结果表明,相较于之前的卫星,高分七号双线阵相机的几何检校精度、几何定位精度以及前后视相机的相对几何精度都有了明显的提高。后续还需要进行大量的几何精度测试以验证高分七号双线阵相机及相关几何处理算法的稳定性。
高分七号作为中国首颗亚米级高分辨率立体测绘卫星,从精度检验结果上看,已经达到了当前国外商业卫星平面高程几何精度标准,标志这中国国产卫星高精度卫星载荷平台和地面处理能力上升到一个新的台阶,处于国际先进水平,为后续相关卫星工作的开展具有重要的实际意义。
