融合遥感时间序列时空谱信息的森林扰动检测与归因研究进展
2024-04-17吴伶刘湘南刘美玲张廷伟杨宝文徐宇岐
吴伶,刘湘南,刘美玲,张廷伟,杨宝文,徐宇岐
中国地质大学(北京) 信息工程学院,北京 100083
1 引言
作为陆地分布最为广泛的植被类型,森林在气候调节(Piao等,2020;黄麟,2021;Xu等,2022)、生物多样性保护(Betts等,2017)、水土保持(孙聃等,2018)、碳固定(傅声雷和傅伯杰,2019;Tong等,2020)和生物栖息地提供(Oeser等,2021)等生态系统服务中扮演着重要角色。但是,近几十年来,由全球气候频繁异常变化引起的干旱、暴雨、火灾、病虫害等自然驱动因素以及砍伐、毁林开荒、放牧、城镇化发展等人为驱动因素引起的森林扰动,严重影响森林生态系统的组成、结构和功能,削弱了其生态服务能力(刘魏魏等,2016;Thom 和Seidl,2016;Yang等,2020;国家遥感中心,2021;Feng等,2021;刘桂芳等,2022)。因此,准确、及时、持续地掌握森林扰动信息对于森林管理、理解气候变化以及碳核算等至关重要。森林扰动是指导致森林覆盖率和生物量明显下降或消失的事件(Huang等,2010;沈文娟等,2018),如引起森林覆盖类型转换的皆伐、火灾等事件,以及森林覆盖类型不变而只是引起森林覆盖率和生物量等森林状态、组分和结构发生变化的择伐、病虫害、暴风雨、干旱等事件。森林扰动检测的目的则是提取上述扰动事件的发生时间、位置以及程度等信息,从而掌握森林扰动的时空特征。不同驱动因子引起的森林扰动导致的森林生长状态、林分物种组成、结构和功能变化存在差异,例如砍伐直接导致林木死亡,而适度的自然林火能促进林分更新与演替(Rogers等,2015)。同时,不同驱动因子引起的森林扰动之间也存在动态交互影响,例如森林火灾可减轻虫害爆发(詹庆斌等,2016;Jentsch等,2021),而干旱加剧虫害爆发(Bao等,2019)。另外,明确不同区域、不同时期占主导地位的森林扰动驱动因子对于森林可持续管理和区域生态安全也具有重要意义(张颖和丁昱菲,2019),例如以病虫害、乱砍滥伐和火灾作为森林3大主要扰动类型的中国与火灾和暴风雨等两种主要自然驱动因素引起森林扰动的欧洲,根据各自的森林状况和国情提出了不同的森林灾害防治措施。基于上述原因,在关注森林是否发生扰动、扰动时间、位置和程度等信息的同时,还需识别引起森林扰动的驱动因子,即森林扰动归因。森林扰动时间、位置、程度以及驱动因子等信息能有效提升对森林演替过程、发展态势及其驱动和响应机制的理解能力,可为揭示气候变化和人类活动影响下的区域或全球尺度森林演变规律奠定基础,从而满足生态环境治理、应对气候变化和实现可持续发展等需求。
遥感变化检测是定量分析和确定森林扰动特征和过程的有效手段。过去几十年,大尺度动态观测的卫星遥感数据成为森林监测的强有力数据支撑,尤其是时间跨度长(近50年)且免费开放下载的中分辨率(30 m)Landsat 数据,为精细、持续地刻画森林扰动提供了新机遇(Townshend等,2012;Hansen等,2013;Wulder等,2019;Zhu等,2019;Hemati等,2021)。早期的传统变化检测方法,如图像差值法、主成分分析法(PCA)、缨帽变换法(K-T 变换)、分类后比较法(PCC)以及变化矢量法(CVA)等(Bruzzone等,2004;Lu等,2004;Chen等,2011),一般是通过对比两期或少数几期影像的差异进行变化检测。相比于采用两期或少数几期遥感影像进行森林变化检测的传统方法,借助遥感时间序列开展森林扰动检测能充分利用时间上下文信息重构或分解森林物候变化信息,消除季节变化引起的伪变化,而具备较高时间分辨率的遥感时间序列又可以实现扰动时间的精确提取以及扰动事件的(准)实时监测,从而提高扰动检测时空域精度,且基于遥感时间序列的森林扰动检测能获取森林演替和发展态势等过程信息,是当前遥感科学和生态环境科学等领域的研究重点与热点。
由于遥感时间序列蕴含不同驱动因子导致的森林组成、结构、功能变化及其差异信息,这为进一步融合遥感时间序列的时间维、空间维和光谱维(时空谱)信息开展森林扰动检测与归因提供了理论支撑,成为近年来学者和研究机构关注的新兴研究主题。通过综合利用森林扰动事件引起的遥感时间序列在时间、空间、光谱等多个维度的变化及其差异信息,目前学者在消除季节性变化(Huang等,2010;Hamunyela等,2016,2020;Reiche等,2018)、构建空间特征时间序列(Silveira等,2018;张弼尧,2019;Meng等,2019,2021;Liu等,2021)、面向对象扰动检测(Ahmed等,2017;Bueno等,2019)、扰动检测后消除伪变化(Shimizu等,2019;Ye等,2021)等扰动检测,以及扰动归因(Hermosilla等,2015;Kennedy等,2015;Huo等,2019;Shimizu等,2019;Senf和Seidl,2021b;Sebald等,2021;Zhang等,2022)等方面展开了积极探索。上述研究通过从时间、光谱和空间等多个维度全面描述森林各类扰动事件,减少了扰动检测的错分漏分误差,同时多个维度信息的综合也有助于减少扰动归因的误差。
本文围绕森林扰动检测与归因两个方面阐述基于遥感时间序列的森林扰动监测国内外研究现状与发展态势,介绍了面向森林扰动的融合遥感时间序列时空谱信息的变化检测方法与技术,总结了基于遥感时间序列的森林多类型扰动归因方法和时空谱特征,分析了森林扰动遥感监测目前存在的问题,并对未来研究方向给出了一些见解。
2 基于遥感时间序列的森林扰动检测
森林扰动归因的前提是检测到森林扰动事件,扰动检测精度直接影响后续归因精度。国内外学者针对不同应用对象和目的提出了大量遥感时间序列变化检测算法(赵忠明等,2016;汤冬梅等,2017;张良培和武辰,2017;Zhu,2017;沈文娟等,2018;Ghaderpour等,2021;张立福等,2021)。遥感时间序列变化检测算法性能取决于多方面因素,本文将主要从数据(遥感时间序列观测频次)、特征(森林扰动光谱响应特征、时空特征融合)、算法(多变化检测算法集成、低强度森林扰动检测)等方面介绍面向森林扰动的遥感时间序列变化检测的研究进展。
2.1 遥感时间序列观测频次
基于像元尺度的遥感时间序列变化检测算法主要利用遥感时间序列的时间维信息,因此遥感时间序列的观测频次是影响变化检测算法性能的重要因素之一(Bullock等,2020a)。基于光谱轨迹的Landsat 干扰和趋势监测(LandTrendr)算法通过每年同一季节的影像(准周年影像)构成的时间序列最小化季节性变化和太阳角度差异对扰动检测的干扰(Kennedy等,2010;沈文娟和李明诗,2017;殷崎栋等,2020),但其每年一景影像的数据频次无法实现年内尺度的扰动检测,或当扰动事件发生在当年观测时相之后,则会将该扰动发生时间错误地标注为下一年(Tyukavina等,2017)。面向具有高观测频次的稠密时间序列的变化检测算法可借助多年稠密遥感影像模拟季节性变化的方式消除对扰动检测具有较大干扰的季节性变化和太阳角度差异,实现年内尺度扰动检测,减少检测时间延迟,典型方法如季节与趋势分解与断点识别算法(BFAST)(Verbesselt等,2010a,2010b,2012)、连续土地覆盖变化监测和分类算法(CCDC)(Zhu 和Woodcock,2014)、指数加权移动平均变化检测算法(EWMACD)(Brooks等,2014,2017)、土地扰动连续监测算法(COLD)(Zhu等,2020)等。但上述稠密时间序列变化检测算法存在以下问题:未考虑由气候变化引起的季节性变化年际差异,即认为多年的年内季节性变化一致(Puhm等,2020);忽略了在云雨影响下有效观测不等间隔分布的问题,其会影响季节性变化的拟合效果,进而影响扰动检测精度(Ghaderpour和Vujadinovic,2020;Puhm等,2020)。针对上述问题,Puhm 等(2020)结合结构性时间序列模型和卡尔曼滤波,在拟合森林年内季节性变化的基础上,描述了季节性变化年际差异,并消除了不规则采样间隔和未被云掩膜算法去除的污染像元对扰动检测的影响。Ghaderpour 和Vujadinovic(2020)提出的光谱突变与趋势检测(JUST)算法无需假定季节变化模式,能有效克服因时间序列不等间隔分布和低信噪比等原因可能造成的季节性变化拟合效果差的问题。另外,也有研究提出了深度学习算法具有面向不规则分布时间序列开展扰动检测的潜力(Kong等,2018)。
多云雨地区(如热带和亚热带)的遥感时间序列基本是稀疏且不规则分布(Wulder等,2016),导致关键季节期影像缺失造成季节性变化过拟合问题(Brooks等,2012;Zhu 和Woodcock,2014;Hamunyela等,2016)。同时,在线变化检测算法为消除云雨等短期噪声的干扰,一般要求出现连续异常观测值时才判定为扰动,如COLD 算法设定为6 次连续异常观测(Zhu等,2020),该策略虽然减少了永久性砍伐(如毁林开荒)、火灾等造成长期性影响的扰动类型的错分误差,但也提高了砍伐后种植、季节性病虫害等短周期扰动事件的漏分误差,尤其在遥感时间序列稀疏的多云雨地区的森林扰动漏分的可能性更高(Bullock等,2020b)。即使检测到扰动,稀疏时间序列也会降低扰动检测的时间精度(Cardille等,2022)。因此,上述原因导致基于稠密时间序列的变化检测算法在多云雨地区的适用性受到限制。解决该问题的策略之一是通过数据插补的方式加密遥感观测时相,进而模拟季节性变化。Platt 等(2016)和Wang等(2018)通过插值算法生成稠密Landsat时间序列进行变化检测。Wu 等(2020)借助时空数据融合算法生成的月度Landsat 时间序列描述季节性变化,进而检测森林扰动。但是,基于合成稠密时间序列的变化检测仍然依赖实际有效影像的数量和质量,因为其决定了稠密时间序列的重构精度(Gao等,2015)。另外,大多数插值算法或数据融合算法重构云雨污染像元时,并未考虑该像元潜在扰动情况(如土地覆盖变化),插补时仍认为该像元为稳定状态,可能导致后续扰动检测的时间延迟(Wu等,2020)。
2.2 森林扰动光谱响应特征
光谱特征对于不同森林扰动类型的响应程度不同,但大多选择对森林结构或绿色植被叶面积敏感的光谱指数,这些光谱指数大致可概况为3 类:光谱波段、植被指数和缨帽变换指数(表1)。短波红外因其较少受大气噪音影响以及对森林和土壤以及树皮或树枝的响应差异,其在林火、砍伐等森林扰动制图中能获得较高精度(Cohen和Goward,2004;Schroeder等,2011)。植被指数通过波段组合增强植被绿量和背景光谱组分的对比度,提升了其对绿色植被变化的敏感度,如常用于森林砍伐检测的归一化植被指数(NDVI)(DeVries等,2015;Wu等,2020)、可刻画虫害动态以及森林砍伐和再生的归一化水汽指数(NDMI)(Goodwin等,2008;Otero等,2019;Meng等,2022)、以及能识别砍伐、火灾和虫害等不同森林扰动类型的归一化燃烧指数(NBR/NBR2)(Cohen等,2010;Kennedy等,2010;Smith等,2019)等。通过缨帽变换获取的亮度(TCB)、绿度(TCG)和湿度(TCW)等缨帽变换指数及其衍生指数(如干扰指数(DI),缨帽变换角(TCA))能够较好地表现植被的物理特性,有助于识别扰动类型和强度(Healey等,2005;Hais等,2009;吕莹莹等,2014;Gómez等,2015)。

表1 面向森林扰动检测的时空谱特征案例Table 1 Cases of spatio-temporal-spectral features for forest disturbances detection
不同森林扰动类型导致的光谱特征变化存在差异,如皆伐导致的森林光谱变化要明显高于虫害和森林退化(Hais等,2009;DeVries等,2015);砍伐、火灾引起的NBR 变化幅度接近,且都大于虫害和道路建设(Li等,2021);而火灾造成短波红外1 波段(SWIR1)值比砍伐更低(Cardille等,2022)。因此基于单一光谱特征单一阈值的变化检测存在以下问题:不同森林类型、森林扰动类型有不同的扰动响应阈值,依赖单一特征单一阈值会引起明显的错分和漏分误差(Shimizu等,2019;Bueno等,2020)。Bueno等(2020)发现,不同森林类型基于不同光谱特征得到的森林扰动地图的空间一致性较低。因此,有研究开展了集成多个光谱特征的变化检测,以提高扰动检测的精度。多光谱特征集成策略主要有两种:第1种是基于多数、平均或特定分布等统计规则的集成(Lin等,2020;Zhu和Woodcock,2014;Zhu等,2020),例如超过半数的特征初步检测判定为扰动则确定为扰动(Lin等,2020)。第2种是将各个特征的初步变化检测结果(如变化幅度、持续时间、斜率等)作为分类特征训练二元(扰动或未扰动)分类器(如随机森林算法)再次进行扰动检测(Cohen等,2018)。Cohen 等(2018)针对Landsat 的6 个光谱波段及其计算得到的3 个植被指数和4 个缨帽变换指数分别借助LandTrendr 变化检测算法进行扰动检测,并将13 个光谱特征进行不同数量(2—13)的组合,然后再将多光谱特征组合在可能扰动年份的光谱值、变化幅度和持续时间作为随机森林分类算法的输入特征进行二次分类进行扰动检测。相比单一光谱特征,多光谱特征集成有效提高了扰动检测的精度。
2.3 时空特征融合
扰动不仅引起森林光谱特征变化,还会引起森林纹理、形状结构与关系等空间特征的变化,因此有研究利用空间特征进行森林扰动检测。如利用灰度共生矩阵(GLCM)(覃先林等,2006;梅树红等,2019)、分形(张军团等,2008)等纹理特征的森林扰动检测;综合光谱、纹理和形状特征的分类后森林扰动检测(章紫粼和卢鹏,2019);有研究利用描述空间异质性和邻接等空间关系的半变异函数(De Oliveira Silveira等,2018)和马尔可夫随机场(谢福鼎等,2018;谷鑫志等,2019)开展森林扰动检测。此外,能减少噪声对结果的影响且综合考虑了遥感影像光谱特征和空间特征的面向对象分析方法也被广泛应用于森林扰动检测,有效提高了变化检测精度(Desclée等,2006;Platt 和Schoennagel,2009;李春干和代华兵,2017;李春干和梁文海,2017;雷鸣等,2019;冯林艳等,2020)。但上述面向双/多时相遥感影像的森林扰动检测只考虑了扰动造成的空间特征变化,未利用森林光谱特征在时间维度的变化,当基于遥感时间序列进行森林扰动检测时,忽略时间、空间任何一个维度显然不能全面挖掘时间序列中的有效信息(赵忠明等,2016),表1 列出了基于时序和空间特征融合的森林扰动检测典型案例。本研究将目前面向森林扰动检测的时序特征与空间特征融合方式总结为4类:时间序列的空间相似性、空间特征的时间序列、面向对象的时间序列变化检测和基于扰动空间特征的伪变化消除。
时间序列的空间相似性:在一定的空间邻域范围内,像元时间序列表现出相似的动态变化,利用空间上下文信息对光谱指数时间序列进行空间标准化处理可有效消除季节性变化对扰动检测的干扰。例如利用光谱波段或缨帽变换指数的全局均值和标准差计算Z 得分的集成森林Z 得分指数(IFZ)(Huang等,2010;黄春波等,2015;胡圣元等,2020;郑志豪等,2021)或扰动指数DI(Healey等,2005;Hilker等,2009;杨辰等,2013;李洛晞等,2016;王乾坤等,2017);在空间邻域内森林像元季节性变化相似的合理假设下,利用中心像元值与邻域内森林像元中位数比值消除季节变化,生成标准化时间序列进行森林扰动检测(Hamunyela等,2016,2020;Reiche等,2018);Wu 等(2022)采用NDVI 时间序列空间标准化消除季节性变化、在标准化NDVI 时间维变化过程拟合中融入空间邻域信息以及整合空间邻域残差计算空间统计量等多层次融合空间上下文信息的策略,发展了不依赖稠密时间序列拟合季节性变化和对云雨等噪声抗干扰能力进一步提升的在线变化检测算法,可在有效遥感观测数据稀疏的多云雨地区及时、准确地获取年内尺度森林扰动信息。此外,也有研究考虑到时间序列的时空邻域自相关性,利用时空统计自回归模型消除邻域像元残差时间序列的空间自相关性,以期提高BFAST 算法的森林扰动检测精度(Lu等,2016)。
空间特征的时间序列:由于扰动会引起森林空间结构与关系等空间特征的变化,有研究通过分析空间特征的时间序列变化开展森林扰动检测。Meng 等(2019,2021)通过GLCM 的对比度和景观分形维数度量森林空间纹理特征,并基于上述两个纹理特征时间序列有效识别了包括突变和连续而缓慢变化(渐变)的森林生态系统的干扰—恢复动态过程。Silveira 等(2018)根据季节性变化不会引起描述空间异质性的半变异函数基台值等参数变化而扰动会造成参数变化的差异,构造半变异函数参数时间序列开展森林扰动检测。考虑到森林扰动的时空相关性,张弼尧(2019)、Liu等(2021)借助时空莫兰指数时间序列分别对森林扰动、森林扰动—恢复过程进行监测。
面向对象的时间序列变化检测:基于遥感时间序列影像使用面向对象方法监测森林扰动不仅依据森林的光谱特征,还考虑时空上下文信息,充分利用了时间序列的时空谱特征(Bontemps等,2012;Ahmed等,2017;Bueno等,2019)。例如Bueno 等(2019)借助多尺度分割算法针对多时相Landsat 多波段差值影像进行面向对象分类,通过对比森林扰动斑块与非扰动斑块的最大梯度值差异提取能区分扰动与季节性变化的特征,并将其输入随机森林算法训练二元(扰动或未扰动)分类器进行森林扰动检测,该方法有效融合了Landsat时间序列的时空谱特征。
基于扰动空间特征的伪变化消除:考虑到森林扰动的显著空间相关性,近年来有研究也证实了利用扰动的空间相关性在扰动检测后消除噪音等伪变化的巨大潜力(Shimizu等,2019;Lin等,2020;Ye等,2021)。Shimizu 等(2019)、Lin 等(2020)基于八邻域规则定义空间邻域,并将扰动像元少于一定数量的空间邻域的中心像元判定为噪声等伪变化。Ye 等(2021)在像元尺度扰动检测的基础上,基于空间孤立的扰动像元可能是噪音等伪变化的合理假设,通过设定森林扰动斑块面积阈值消除空间孤立的错分像元,同时修复漏分的扰动小斑块。
2.4 多变化检测算法集成
研究表明不同变化检测算法得到的扰动结果存在较大差异(Cohen等,2017;Awty-Carroll等,2019),同时由于长时间序列遥感数据包含多样化土地覆盖类型和大气效应以及多类型扰动事件,针对特定土地覆盖类型或扰动类型设计的单个算法可能不是描述所有状况的最有效方式(Bullock等,2020a)。例如Rodman 等(2021)发现,利用LandTrendr算法检测野火的精度要高于导致森林死亡的虫害。因此,有研究通过集成多种变化检测算法以提高扰动检测精度。多算法集成策略有“并行”和“串行”两种方式(图1)。“并行”策略是每个变化检测算法单独运行,再基于判定规则集成多个变化检测算法结果确定最终检测结果。“串行”策略则是多个检测算法依次运行,将前一个算法的输出结果作为后一个算法的输入,并将最后一个变化检测算法结果确定为最终检测结果。“并行”方式与多光谱集成类似,主要也有两种:一种是基于简单统计规则的集成,例如超过一定数量的变化检测算法初步检测判定为扰动则确定为扰动(Hislop等,2019);另一种是将不同变化检测算法的输出(如扰动光谱值、扰动强度、持续时间、斜率、二分检测结果等)和辅助特征(如地形、森林类型等)作为分类特征训练二元(扰动或未扰动)分类器再次进行扰动检测(Healey等,2018;Hislop等,2019;Cohen等,2020)。Healey 等(2018)将8 个典型变化检测算法的输出结果和Landsat 光谱值、地形、森林类型等信息输入随机森林算法进行扰动检测。Hislop等(2019)利用3 个光谱指数(NBR、NDVI、TCW)和两个变化检测算法(LandTrendr和R 语言中的结构变化(Strucchange)包)构建了6 个森林扰动变化检测模型,并比较了基于统计规则集成和基于随机森林算法集成的两种并行方式的精度,结果表明基于随机森林算法集成的精度更高,且通过将变化检测算法错分为扰动像元的非扰动像元加入到随机森林算法中(此时标记为非扰动),让扰动检测的错分误差大大降低,但提高了扰动的漏分误差。考虑到多光谱特征集成检测扰动的优势,Cohen 等(2020)采用多个光谱(Cohen等,2018中使用的13个光谱特征)和多个算法(LandTrendr和COLD)同时集成的策略进行森林扰动检测。相比基于简单统计规则的多算法集成,采用随机森林算法等分类器的多算法集成策略的优势在于其形成回归参数的过程中无需定义分类器权重,而且能解决扰动训练数据的过拟合问题(Healey等,2018)。“串行”是将前一个算法的输出结果作为下一个算法的输入(Bullock等,2020a),其优势在于不必考虑选择哪一个算法输出作为最终结果。Bullock 等(2020a)首先基于CCDC 进行变化检测,再利用累积和(CUSUM)算法识别被CCDC漏分的扰动,最后借助邹检验(Chow Test)移除被上述两个变化检测算法错检的断点,该算法具备检测短周期、低强度扰动事件的潜力。多算法集成策略虽然相比单个变化检测算法运行时间长,但其能在并行计算环境中有效实施,且能够克服单个变化检测算法的偏差,促进不同算法优势的融合,从而达到更高的扰动检测精度。
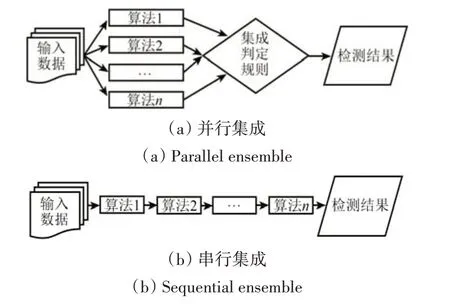
图1 多变化检测算法集成(修改自Bullock等,2020a)Fig.1 Ensemble of time series algorithms(Modified from Bullock et al.,2020a)
2.5 低强度森林扰动检测
目前大多数变化检测算法主要针对引起土地覆盖类型转换的高强度扰动(如砍伐、火灾等),对森林覆盖类型不变而只是森林状态、组分和结构发生低强度扰动(如择伐、病虫害、干旱等)的检测效果不佳。有研究表明,扰动检测精度与扰动类型和强度密切相关,高强度扰动检测效果更佳(Rodman等,2021)。低强度扰动检测效果不佳的原因如下:(1)与砍伐、火灾等强扰动类型相比,干旱等低强度扰动造成的森林景观变化微弱且空间不连续(Huang等,2019);(2)渐变、低强度的森林扰动易与季节性变化、大气效应混淆或被其掩盖(Huang等,2019;Rodman等,2021);(3)树木的自然变化及其复杂性(如不同叶龄)也可能与干旱等引起的扰动具有相似性(Chavana-Bryant等,2017);(4)由低强度扰动引起的一些光谱特征变化响应较微弱(Ahern,1988)。对于可能最终导致森林覆盖类型转换为其他土地覆盖类型的长期渐变,如持续干旱导致森林向灌木或草地演替(Huang 和Anderegg,2012),准确、及时地探测到其早期阶段的低强度扰动对于实现早期预警非常重要(Hartmann等,2018a,2018b)。相比于利用高成本和有限时空覆盖范围的高空间或高光谱遥感数据检测低强度扰动,具有短重返周期、更大空间覆盖、中分辨率且免费的Landsat和Sentinel遥感时间序列数据被公认为低强度扰动检测的重要数据源之一(Vogelmann等,2016;Woodcock等,2020)。因此,近年来借助Landsat 等遥感时间序列数据发展面向中低强度扰动的变化检测算法成为受到更多关注的新兴研究主 题(Woodcock等,2020)。Brooks 等(2014,2017)利用统计过程控制领域的指数加权移动平均(EWMA)控制图对低强度偏移异常的敏感性优势,实现了包括小尺度择伐事件在内的森林砍伐检测。Pasquarella 等(2017)通过绿度指数TCG时间序列模拟季节性变化消除自然落叶对虫害检测的干扰,并借助CCDC 算法生成日尺度合成影像,实现虫害的近实时检测。Zhu等(2020)通过引入时间调整均方根误差(RMSE)、最小RMSE和变化角改进CCDC 算法,进而检测低强度扰动事件。Bullock 等(2020b)利用混合光谱分解和时间序列分析技术同时获取森林砍伐和森林退化的低强度扰动信息。Ye 等(2021)通过参数优化、指数选择、动态分层监测和顾及空间信息等多种策略实现了对森林虫害的检测。Meng 等(2022)在利用阈值识别南方松甲虫害扰动森林的基础上,通过分析光谱指数异常轨迹线性拟合趋势的K 斜率进一步提高中低强度虫害扰动的检测精度。
3 基于遥感时间序列的森林多类型扰动归因
由表2可知森林不仅受到地形、气象、生物灾害等自然驱动因素的影响,而且受到社会经济、政策等人为驱动因素的影响。森林扰动归因的目的则是识别出引起森林扰动的驱动因子。因此,基于遥感时间序列的森林扰动归因的本质是面向森林多类型扰动的遥感分类问题,其借助不同驱动因子导致的森林扰动的遥感特征变量作为分类算法的输入识别扰动类型。本文将从森林多类型扰动归因所选用的时空谱特征和扰动归因方法两方面介绍目前森林扰动归因的研究进展。

表2 森林扰动驱动因子分析案例Table 2 Cases of driving factor of forest disturbances
3.1 扰动归因时空谱特征
森林扰动归因是借助分类算法进行扰动类型识别,因此作为分类算法输入的归因特征选择至关重要。从时间顺序划分,归因特征可分为扰动前、中、后3 种类型(Hermosilla等,2015;Kennedy等,2015;Huo等,2019;Shimizu等,2019),其理论基础是不同森林扰动类型在扰动前、中、后不同时期的归因特征存在差异。Hermosilla 等(2015)将扰动前、后的变化幅度、持续时间、变化速率(变化幅度/持续时间)以及扰动平均变化幅度和持续时间同时作为归因特征识别火灾、砍伐、道路建设和森林覆盖类型不变下的虫害、干旱等多种森林扰动类型。Huo 等(2019)将NBR等多个光谱指数的扰动前两年均值、扰动后两年均值作为区分砍伐、火灾以及虫害等扰动类型的归因特征。
按特征维度划分,归因特征可分为光谱、时间、空间以及地形4 种类型,详见表3。可见:光谱特征是应用最早且最为广泛的扰动归因特征,典型的如不同扰动类型具有的不同光谱变化幅度。相关研究也表明,光谱变化幅度特征在识别扰动类型的随机森林算法中的贡献度最高(Shimizu等,2019),例如Cardille 等(2022)利用NBR 和SWIR1的变化幅度区分砍伐与火灾。由于每个扰动类型都有其独特的空间范围和时间动态(McDowell等,2015),如火灾的空间范围一般比人为砍伐范围大、虫害等缓慢扰动类型的时间自相关性更高,这为利用时空信息开展扰动归因提供了理论支撑。Sebald等(2021)基于自然因素(如暴风雨、虫害等)比人为因素(如砍伐等)引起的扰动空间聚集性更高的合理假设,采用一定空间范围邻域内发生扰动的面积比例作为归因特征区分自然与人为扰动,同时考虑暴风雨后在临近区域会频繁爆发虫害的事实(时空相关性),将扰动发生前三年一定空间范围内的累积扰动面积也作为扰动归因特征。Senf 和Seidl 等(2021b)则基于暴风雨引起的扰动斑块面积小而数量多和火灾引起的扰动斑块面积大而数量小的差异,借助一定范围内的扰动斑块个数作为归因特征区分暴风雨和火灾两种自然扰动类型。地形特征对于归因分析的重要性在于一些扰动类型(如树木采伐)一般发生在特定海拔区域(如山区)(Shimizu等,2019)。上述研究大多融合时空谱特征进行扰动归因,也有少量研究只采用了时谱特征(表3),但归因特征的重要性(即选择何种扰动归因特征)因研究区域以及扰动类型不同而有所不同,因为诱发扰动的因素高度取决于区域内的自然和人文环境(Shimizu等,2019)。

表3 面向森林扰动归因的时空谱及地形特征Table 3 Spatio-temporal-spectral and topographic features for attribution of forest disturbances
3.2 森林多类型扰动归因方法
当森林在某一时期遭受占主导地位的单一扰动时,提取该扰动类型的扰动范围、时间等信息对于分析森林状况是至关重要的。学者们开展了针对某一驱动因子(如砍伐、火灾、虫害、台风等)引起的森林扰动归因研究。如Hamunyela 等(2016)、Reiche等(2018)、Smith等(2019)提取由砍伐造成的森林扰动面积和时间等信息。Pasquarella 等(2017)、Ye 等(2021)、Meng 等(2022)开展面向森林虫害的扰动检测。王乾坤等(2017)、Woźniak 和Aleksandrowicz(2019)以 及Fornacca 等(2021)提取了森林火灾过后的火烧迹地。Zhang 等(2021)评估了台风过后森林受损情况。但森林在不同区域、长时间跨度内大多经历多种类型扰动,单单刻画某一扰动类型不足以全面反映其扰动情况,进而不能为分析不同扰动类型之间的动态相互影响提供支撑。因此,学者们开展了面向森林多类型扰动的归因研究。依据扰动归因之前是否进行扰动检测,目前基于遥感时间序列的森林多类型扰动归因方法可大致分为直接法和两阶段法(图2)。
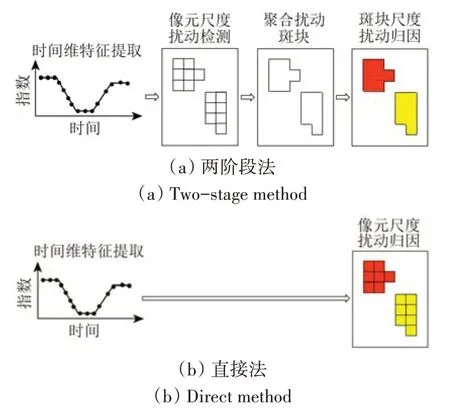
图2 森林多类型扰动归因方法(修改自Shimizu等,2019)Fig.2 Attribution of multi-type forest disturbances(Modified from Shimizu et al.,2019)
直接法事先并不检测扰动,而是直接利用从遥感时间序列数据中获取的时谱度量指标以及扰动类型先验知识,在像元尺度借助机器学习算法(如随机森林、决策树等)同步进行扰动检测与归因(Shimizu等,2019;Cardille等,2022)。Shimizu等(2019)将NBR 和缨帽变换指数通过LandTrendr算法进行时间分段后提取的时间特征和地形特征作为随机森林算法的输入直接预测扰动类型。Cardille 等(2022)为降低扰动检测的时间延迟,融合Landsat 8 和Sentinel 数据加密观测时相,并利用NBR 时间特征和SWIR1 的光谱特征识别了夏季砍伐、冬季砍伐以及火灾等森林扰动类型。
森林扰动归因的另一种典型方法为两阶段法。两阶段法首先在像元尺度基于变化检测算法确定扰动事件,在将扰动像元合并为扰动斑块后,提取扰动事件的时空谱特征,再借助机器学习算法(如随机森林、深度学习算法等)进行扰动事件归因(Hermosilla等,2015;Kennedy等,2015;Oeser等,2017;Murillo-Sandoval等,2018;Nguyen等,2018;Shimizu等,2019;Vogeler等,2020;Chen等,2021;Li等,2021)。Shimizu 等(2019)首先通过多光谱特征集成的方式检测扰动,再融合扰动斑块的空谱特征作为随机森林算法的输入,识别了砍伐、道路和定居点建设、城镇化、大坝和水库建设、林农轮作、毁林开荒、转为经济林种植等由人为驱动因素引起的森林扰动类型。Vogeler 等(2020)首先基于LandTrendr 算法检测森林扰动,进而将光谱、地形以及土地保护信息作为随机森林算法的输入特征,从斑块水平识别出火灾、采伐、暴风雨、洪水、土地转换5种森林扰动驱动因子。Chen 等(2021)利用滑动窗口技术构建的自适应阈值检测潜在扰动,然后借助多时相卷积神经网络(CNN)深度学习网络识别火灾和砍伐两种森林扰动类型。也有研究并未将扰动像元合并为扰动斑块,且只利用了扰动事件的时谱特征。如Schleeweis 等(2020)基于多算法集成方式进行扰动检测,并将光谱及其变化幅度、地形等指标作为随机森林算法的预测变量,识别砍伐、火灾、胁迫(干旱、病虫害等造成的森林冠层损失)和转变等扰动类型。Esteban等(2021)首先利用BFAST 算法对Landsat 计算的6 个光谱指数时间序列分别进行变化检测,然后针对每个光谱指数,将其变化幅度和机载激光扫描仪数据获取的统计特征作为随机森林算法的输入变量初步识别3种森林采伐方式,最后借助最高频次、随机森林最高投票比例和总体投票比例等统计规则集成6个随机森林算法的初步归因结果最终确定森林扰动归因类型。Zhang 等(2022)首先基于CCDC算法进行变化检测,并利用其检测出的断点的时谱特征识别了北美的北方和北极生态系统火灾、虫害和砍伐等森林扰动类型。
两阶段法的另一种方式是基于已有扰动产品,借助机器学习算法进行扰动归因(Huo等,2019;Sebald等,2021;Senf 和Seidl,2021b;De Marzo等,2022)。Huo 等(2019)基于马里兰大学生产的全球30 m 森林变化产品,借助随机森林算法将全美国高强度的砍伐、致死虫害以及火灾等扰动事件进行归因。Senf 和Seidl(2021b)则基于其(Senf 和Seidl,2021a)前期生产的欧洲30 m 森林扰动地图,借助随机森林算法将欧洲近几十年最重要的火灾和暴风雨等两种自然驱动因素引起的森林扰动事件进行归因。Sebald等(2021)基于上述欧洲30 m 森林扰动图,借助随机森林算法将奥地利的采伐、虫害以及强风侵袭(风倒木)等森林扰动事件进行归因。De Marzo 等(2022)从阿根廷查科森林扰动地图中合并扰动斑块,并将斑块形状指标以及时谱指标作为随机森林模型的预测变量,识别出砍伐、火灾、间伐、干旱和河岸变化五种森林扰动类型。
两阶段法的优势在于其基于斑块尺度,能实现连续、更好视觉呈现的扰动归因制图效果,也便于利用更多的空间特征进行扰动归因,因此两阶段法是目前森林扰动归因的主流方法。相比两阶段法,因为无需扰动检测与制图、合并扰动斑块等步骤,直接法的运行效率更高,但其不足之处在于由于缺乏扰动制图,其不适用于需要利用扰动时间等信息的分析。
4 结语
本文系统评述了融合遥感时间序列时空谱信息的森林扰动检测与归因研究进展,重点介绍了当前森林扰动检测在时间序列观测频次选择、光谱特征选择、时空特征融合、多算法集成以及森林低强度扰动检测等方面的方法与技术,总结了基于遥感时间序列时空谱特征的森林多类型扰动归因方法。综合当前相关研究进展可以看出,国内外学者在遥感时间序列变化检测与森林扰动归因分析领域取得了丰富的研究成果,但仍需针对以下问题或研究方向展开研究:
(1)融合遥感时间序列时空谱信息可以从时间、光谱和空间等多个维度全面描述森林各类扰动事件,从而减少扰动检测的错分漏分误差,同时多个维度信息的综合也有助于避免各类扰动事件归因中的“同物异谱、异物同谱”现象(张立福等,2021)。因此,深度挖掘森林扰动的时空谱响应特征,进一步充分应用于指数时间序列构建、扰动检测、抗噪声等伪变化干扰、扰动归因等多个方面,可进一步提高森林扰动检测与归因的精度。
(2)目前大多数变化检测算法只是针对某一类强度扰动(特别是高强度扰动)设置单一阈值检测扰动。当某一森林区域在长时间跨度内经历不同强度的多类型扰动,过高的阈值会导致低强度扰动的漏分误差上升,而过低的阈值又会因为观测噪声引起错分误差增加(Saxena等,2018;Shimizu等,2019),无法实现高强度与低强度扰动的高精度同步检测。虽然目前多算法集成策略能在一定程度降低误差,但大多仍针对同是高强度扰动的多种扰动类型,原因在于这些变化检测算法在检测高强度扰动时,无法同步实现对低强度扰动的高响应度。也有一些面向低强度扰动的变化检测算法(如EWMACD)采用优化的低阈值实现不同强度森林扰动的同步检测,但采用低阈值的EWMA 控制图在过程监控时存在观测量具有保持原有趋势的特性(惯性问题),导致对新趋势的发现存在滞后现象,从而引起高强度扰动检测延迟问题(时间精度低)。因此,面向不同驱动因子引起的森林生长状态、组成、结构和功能变化强度差异,构建能全部检测到具有不同变化强度的森林多类型扰动的遥感时间序列变化检测算法,是后续开展森林扰动归因的保障。
(3)森林扰动归因的本质是面向森林扰动类型的分类问题,当前森林扰动归因大多采用基于已标注扰动类型样本构建分类器的全监督学习策略,因此大量、高置信度的训练样本是其取得理想归因精度的关键。而包括中国在内的大部分地区现有的关于森林扰动类型的统计资料有限且缺乏具有明确空间含义的扰动产品(沈文娟等,2018)。虽然通过人工目视解译可获得扰动类型标注样本,但相比地物分类样本标注,在大区域、复杂场景下扰动类型样本标注的工作量更大(Hislop等,2021;Rodman等,2021),且有些扰动类型本身具备稀缺性,加之人为失误、专业能力限制等因素也会导致扰动类型标注不准确,能获得的高置信度标注样本数量有限。同时,由于遥感信息本质上分布的复杂性和随机性,无法保证少量人工选择样本对扰动类型的特征分布有较好的代表性,导致无法获得理想的归因精度。因此,如何在无大量已标注扰动类型样本支撑下实现森林多类型扰动高精度归因显得极为迫切。
