5米光学02星高分辨率高灵敏度大幅宽热红外相机设计与实现
2024-04-17童卫明李昊谦聂云松马军闫秀荣邢辉高长春王保华孙启扬蔡帅郝中洋李岩
童卫明,李昊谦,聂云松,马军,闫秀荣,邢辉,高长春,王保华,孙启扬,蔡帅,郝中洋,李岩
北京空间机电研究所 先进光学遥感技术北京市重点实验室,北京 100094
1 引言
2021年12月26日,5 米光学02 星(又称“资源一号”02E 卫星)在太原卫星发射中心成功发射,卫星上共装载可见近红外相机、高光谱相机和热红外相机3台光学遥感载荷,能够为用户提供5 m 全色/10 m多光谱、30 m 高光谱和16 m 热红外影像。目前卫星在轨稳定运行,已完成在轨测试并交付用户。
热红外相机主要收集目标的热辐射信息,可全天时工作,已广泛应用于陆地资源、环境减灾、目标监视等领域。提高热红外相机的空间分辨率,可以增强目标的识别能力;提高探测灵敏度,可以识别目标内部更小的温度差异,增强目标细节获取能力(李晓曼等,2021);提高探测幅宽,单轨成像可以获取更大范围的热红外影像,减小重访周期,提高观测效率。目前国内外典型航天热红外相机分辨率、灵敏度、幅宽等指标如表1所示(Tonooka等,2005;Barsi等,2014;刘银年等,2009;赵艳华等,2018;刘莉等,2019;白照广等,2021;陈凡胜等,2021)。大幅宽和高分辨率通常很难兼顾,同时对噪声等效温差NETD(Noise Equivalent Temperature Difference)指标的要求越来越高。装载在5 米光学02 星上的热红外相机,采用8192 元长线阵长波红外探测器推扫成像,能够获取7.7—10.5 μm 谱段热红外影像,星下点地面像元分辨率GSD(Ground Sampling Distance)优于16 m,NETD 小于0.1 K@300 K,幅宽大于115 km,同时实现高分辨率、高灵敏度和大幅宽观测,同时能够和可见近红外相机及高光谱相机协同观测,为相关国土资源的调查、监测、监管和产能监控等业务提供国产数据支持。

表1 典型航天热红外相机指标参数Table 1 Typical space thermal infrared cameras parameters
2 相机分系统描述
2.1 技术指标
5 米光学02 星工作在778 km 的太阳同步轨道,轨道倾角98.5°,星上装载的热红外相机对地成像,相机主要技术指标见表2。
表2 热红外相机主要技术指标Table 2 The infrared camera key technical parameters
2.2 总体方案
5 米光学02 星热红外相机采用推扫成像方式,利用大口径长焦距低温光学系统匹配高性能长线阵长波红外探测器实现高分辨率、高灵敏度和大幅宽探测,实现相机所有技术指标参数。5 米光学02星热红外相机主要技术途径如下:
(1)光学系统采用折反式光学系统,包括主光学系统和中继光学系统,光学系统入瞳口径435 mm,焦距1038 mm,推扫方向视场8.6°。主光学系统为离轴三反系统,中继光学系统为透射式系统,中继光学中部分透镜低温工作。
(2)采用8 片1024×6×2 像元的单模块长波红外探测器拼接成线阵方向总像元数8192 元的长线阵探测器,单模块6 级TDI,双线列结构形式,像元尺寸20 μm×20 μm(安萌等,2021)。
(3)制冷机选用长寿命高可靠的脉冲管制冷机,分别为中继光学和探测器制冷,其中中继光学制冷到200 K,探测器制冷到80 K。
(4)采用部分光路定标方案,采用高温黑体和低温黑体进行在轨内定标。
(5)通过移动探测器实现在轨调焦。
2.3 相机分系统组成及工作原理
5 米光学02 星热红外相机分系统由相机主体、相机制冷控制器A、相机制冷控制器B、相机管理器和红外视频处理器共5个设备组成。
相机主体由遮光罩、主光学组件、星上定标装置、中继光学组件、中继制冷机组件、调焦装置、探测器—制冷机组件、焦面电路盒、主体结构和热控组件等组成。来自地面目标的辐射信息经遮光罩进入主光学装置并聚焦,然后经中继光学装置二次汇聚成像在长波红外探测器上。红外探测器将辐射信息转换为电信号,电信号经红外视频处理器模数转换和编码后,发送给数传分系统,数据下传后经地面处理得到热红外影像。相机制冷控制器A 用于对焦面制冷机进行控制。相机制冷控制器B用于对中继制冷机、调焦装置、星上定标装置,制冷机切换阀以及对调焦装置、星上定标装置锁定/解锁进行控制。相机管理器用于完成与卫星数管分系统的通讯,包括:本地遥测量的收集和编码发送,总线指令接收及译码发送,卫星工程参数接收与发送,为热红外相机各用电部分转接一次电源。相机主体组成如图1所示,其他设备均为电路盒。

图1 热红外相机主体模型图Fig.1 The thermal infrared camera model
3 相机分系统关键技术及实现
3.1 大口径宽视场光学系统设计技术
5 米光学02 星热红外相机入瞳口径435 mm,焦距1038 mm,工作F 数2.38,视场8.6°×1.1°,绝对畸变要求小于1 μm。同时受限于星上安装空间,要求光学系统Z 向尺寸不大于800 mm。大口径宽视场红外光学系统设计难度大,宽视场畸变校正困难,同时光学系统像面尺寸大,很难实现较高的出瞳匹配度,很难保证大像面范围内的照度均匀性,光学系统Z 向尺寸约束进一步增加了设计难度。
经过对比同轴光学系统、离轴三反光学系统、离轴四反光学系统、离轴三反加中继光学系统、离轴四反加中继光学系统等多种结构形式,最终光学系统设计为离轴三反加中继光学系统结构形式,离轴三反扩大相机视场,中继光学进行像差校正和畸变校正,在中继光学中使用自由曲面和低温光学技术。通过折镜折转光路压缩光学系统Z向尺寸,保证满足要求。
光学系统布局如图2所示,光学系统尺寸940 mm(X)×1062 mm(Y)×768 mm(Z)。该光学系统结构具有对称式特点,有利于校正宽视场范围内的畸变;像面前部分中继透镜低温工作能够有效降低相机内辐射,提高系统信噪比和动态范围;光学系统具有近像方远心的优点,像面照度一致性好;采用自由曲面技术,进一步降低系统畸变。全视场奈奎斯特频率下平均传函MTF(Modulation Transfer Function)优于0.32,接近衍射极限,绝对畸变不超过0.9 μm,像面照度优于0.98,光学系统成像质量优异,同时尺寸满足5 米光学02 星热红外相机布局要求。光学系统MTF 曲线如图3所示。

图2 光学系统布局图Fig.2 Optical layout

图3 光学系统MTF曲线Fig.3 MTF curve of the optical system
3.2 高性能长线阵长波红外焦平面技术
5 米光学02 星热红外相机探测器由8 片单模块探测器按照品字型结构拼接而成,线阵方向像元总数达到8192元,拼接模型如图4 所示,拼接后线阵方向长度超过160 mm。2021年中国发射的高分五号02 星全谱段相机热红外谱段采用3 片单模块拼接,推扫方向像元总数3072元,2022年美国发射的Landsat 9 TIRS-2 热红外谱段采用3 片单模块拼接,推扫方向像元总数1920 元。5 米光学02星热红外相机探测器是中国目前在轨线阵规模最大的长波红外探测器,探测器读出电路研制难度大,长波探测器制备工艺复杂,拼接困难,同时探测器需要工作在80 K 低温下,探测器封装到杜瓦内组成焦平面,需要解决大尺寸焦平面的力热设计问题。
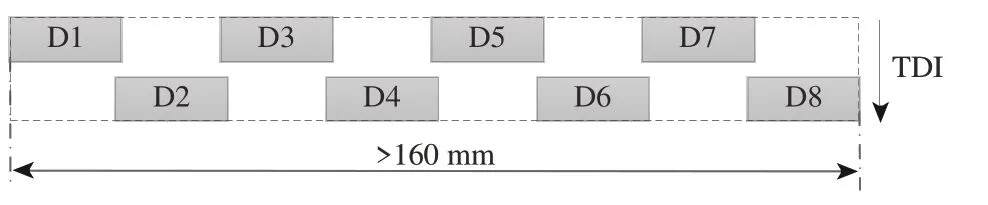
图4 长线阵探测器拼接外形图Fig.4 Long array focal plane stitching model
5 米光学02 星热红外相机设计研制了新版高性能读出电路,器件采用碲锌镉基液相外延长波碲镉汞薄膜材料制备,每片硅读出电路上通过铟柱倒装互连回流焊技术耦合长波碲镉汞探测器,形成长波探测器混成芯片子模块,对子模块采用底部填充与背面减薄工艺,8片单模块芯片通过精密拼接,组成拼接探测器芯片,再在子模块上精密装配谱段滤光片,从而实现长波谱段探测。根据国标GB/T 13584-2011 进行红外探测器性能测试,完成研制后的红外探测器平均峰值探测率D*=8.3×1011cm·Hz1/2·W-1、平均NETD=34.7 mK、平均响应非均匀性=6.76%。
长线阵探测器与制冷机冷板耦合,通过冷箱形式封装,制冷机冷指对冷板进行制冷,保证探测器工作在80 K 低温下。探测器和制冷机冷指耦合后结构形式如图5所示。

图5 焦平面组件模型Fig.5 Focal plane array model
根据光学系统离焦分析结果,要求拼接后8片探测器工作温度下平面度优于20 μm。读出电路一般为硅材料,拼接基板材料通常为蓝宝石(Al2O3)(李言谨等,2008)。从常温到80 K 工作温度,由于探测器内材料线膨胀系数存在差异,变形不匹配会产生应力,可能会对芯片造成应力损伤或使拼接后平面度不满足要求,导致相机轴上和轴外视场不共焦,影响成像质量。当线阵规模越大时,这种热失配会更严重。在5 米光学02 星热红外相机长线阵焦平面组件结构设计时,基于层合板理论,建立力热耦合下长线阵探测器平面度模型,通过多种材料变形匹配设计,最终设计的焦平面结构低温下平面度和应力均满足要求。选用传统结构方案和优化结构方案仿真得到的8 片探测器80 K工作温度下平面度如表3所示,改进后的焦平面结构在拼接仪上进行了低温平面度测试,测试结果和仿真结果基本一致(马军,2022)。

表3 探测器平面度仿真结果Table 3 Flatness simulation results of the FPA
焦平面组件是5 米光学02 星热红外相机的关键组件,为提高可靠性,焦平面制冷进行了双压缩机互为备份设计方案,通过切换阀进行切换,当一台压缩机失效或效率下降严重时可采用另一台压缩机进行焦平面制冷,焦平面—制冷机组件模型如图6所示。
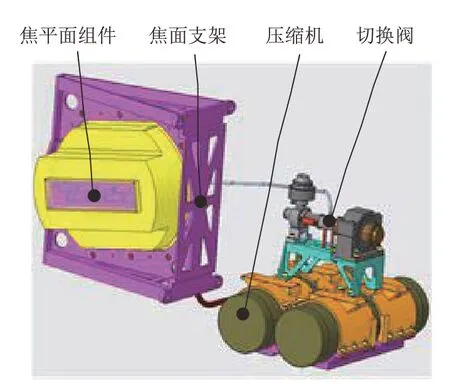
图6 焦平面—制冷机组件模型Fig.6 Focal plane array and cryocooler model
3.3 长波红外低温光学技术
为减小相机内辐射,降低相机背景噪声,提高动态范围,5 m光学02星热红外相机采用了低温光学技术,将中继透镜组中靠近焦面的部分透镜工作温度设计为200 K。中继透镜组常温装调,部分低温工作,光机结构设计需要保证低温变形后镜间距、透镜偏心倾斜、镜面面形满足光学设计公差要求。由于红外透镜材料折射率与温度密切相关,温度波动引起的变形也会引起中继透镜组的性能退化,需要采用精密热控技术,保证工作状态透镜组的温度分布和设计一致,同时制冷功耗和制冷机散热面积设计也需要满足相机热控资源要求。
在低温光学光机结构设计方面,低温透镜进行装框设计,然后再装配到镜筒内,在连接环节进行柔性卸载设计(Kvamme等,2008;Rossin等,2016),保证低温下透镜面形满足要求。低温透镜组常温装调,低温工作,利用有限元工具仿真从常温到低温下镜间距变化,比较仿真下低温镜间距和光学设计下低温间距之间差异,在常温下透镜组定心装调时进行补偿。进行光机热联合仿真分析(Gracey等,2016),采用UG TMG 仿真得到透镜组温度场,然后映射到结构分析有限元模型中,利用MSC Nastran 进行热变形分析,然后进行透镜面形拟合和Zemax相机整机性能分析,迭代中继透镜组光机结构设计直至整机性能满足指标要求。
在低温光学热控设计方面,在国内首次采用低温透镜组机械制冷机制冷方案,在低温透镜组外设计包络式冷屏,冷屏选用高导热铝合金材料,机械制冷机对冷屏制冷,冷屏通过传导和辐射对低温透镜进行制冷,能够有效控制低温透镜温度水平和温度均匀性。在低温透镜组冷屏外表面包覆多层,在低温透镜组和常温透镜组之间设计热窗避免常低温结构之间热串扰,低温透镜组隔热安装,控制冷屏前后开口尺寸,减小低温透镜组向常温部分漏热,从而降低制冷功耗,最终制冷机功耗和制冷机散热面积满足相机总体设计要求。
完成设计后的中继透镜组模型如图7所示,对中继透镜组进行真空像质测试,其中低温部分进行机械制冷,透镜组中心和边缘视场波像差优于0.05λ(λ=10.6 μm),和光学设计结果相当。
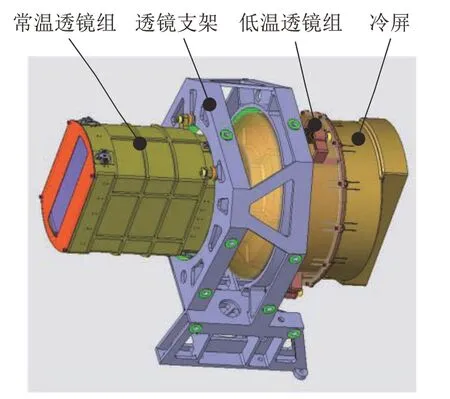
图7 中继透镜组三维模型Fig.7 Three-dimensional model of the lens group
3.4 复杂光学系统装调技术
5 米光学02 星热红外相机光学系统复杂,包含自由曲面和大量高次非球面,加工、检测和装调难度大,具体体现在:离轴三反主光学系统轴外视场像差较大,离轴系统反射镜自由度多,需要带像差装调;中继透镜组含自由曲面和多片高次非球面,自由曲面装调困难,同时透镜装调公差严格,红外定心精度要求高;光学系统常温常压装调、低温真空使用,常温差压下轴外视场存在像差,低温下全视场才能完善成像,需要进行低温下像质测试。在5 米光学02 星热红外相机光学系统装调中,通过采取以下措施,保证系统装调满足要求。
(1)将光学系统分为离轴三反主光学系统和中继光学系统两部分,分别装调,测试满足要求后,再进行对接。
(2)通过计算机辅助装调技术实现对主光学系统的装调,测试轴上和轴外视场波像差,测试波像差RMS 及Zernike 系数和光学设计仿真结果相对应,保证主光学装调的正确性。
(3)自由曲面透镜完成光学加工后利用非接触式面形测试系统Luphoscan 检测面形和偏心倾斜,同时采用CGH 检测自由曲面面形,保证自由曲面透镜加工满足要求。
(4)透镜组在红外定心仪上进行定心装调,由于自由曲面透镜无法定心,装调时利用工艺平晶替代自由曲面透镜进行定心保证自由曲面透镜和前一片透镜镜间距正确,利用自由曲面透镜结构基准进行旋转方向的定位,最终保证自由曲面透镜装调正确。
(5)中继透镜组完成定心装调后,设计补偿光路对中继透镜组进行低温像质测试,保证工作温度下中继透镜组像质满足使用要求。
(6)主光学和中继光学常温常压对接时,采用长波红外干涉仪进行测试,调整折镜和中继透镜组位置,保证整机各视场波像差RMS 值及Zernike系数和光学设计一致,然后进行整机低温像质测试,保证满足要求。常温常压下光学系统轴上和轴外视场测试波前和理论波前对比如表4所示,不同视场下装调测试结果和理论结果高度吻合。
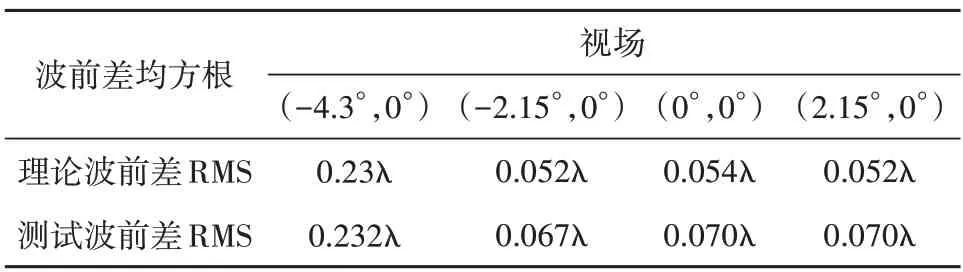
表4 装调后测试波前差和理论波前差对比(λ=10.6 μm)Table 4 Contrast of test system WFEs and theoretical system WFEs after alignments(λ=10.6 μm)
5米光学02星热红外相机完成光学系统装调后,视场、焦距、全视场MTF、视轴引出精度等指标均满足使用要求。自由曲面采用Luphoscan 和CGH检测现场照片如图8所示。
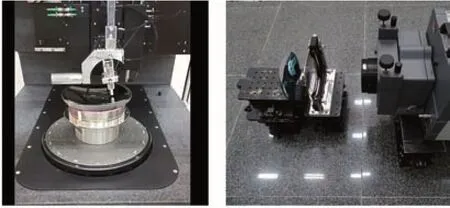
图8 自由曲面透镜检测照片Fig.8 Test picture of the freeform lens
4 地面测试与试验
4.1 真空成像
5 米光学02 星热红外相机低温透镜组工作在低温200 K 温区,常压环境下无法制冷,低温透镜组需要在真空环境进行制冷,然后进行整机像质测试。相机真空成像照片如图9所示。低温工况下8 片探测器奈奎斯特频率下MTF 测试结果如表5 所示,全视场平均MTF为0.151,满足指标要求。

图9 热红外相机真空成像测试照片Fig.9 Vacuum imaging test picture of the thermal infrared camera

表5 不同模块MTF测试结果Table 5 MTF test results of different detector modules
4.2 真空辐射定标
在真空罐内利用2 m 面源黑体对5米光学02星热红外相机进行辐射定标测试,测试现场照片如图10所示。相机分别对299 K、301 K外黑体成像,按照国标GB/T 38236-2019 方法计算NETD,测试结果如表6 所示,满足指标小于0.1 K@300 K 的要求,和最先进的Landsat 9 TIRS-2 载荷NETD 指标相当。

图10 热红外相机真空辐射定标测试照片Fig.10 Vacuum radiometric calibration test picture of the thermal infrared camera

表6 NETD测试结果(300 K)Table 6 NETD test results(300 K)
改变外黑体和内黑体温度、改变相机增益和积分时间,通过对外黑体定标数据的分析得到定标曲线、定标方程和动态范围。并利用内定标黑体的高、低温度点进行了非均匀性校正,同时对绝对定标精度进行了分析和预估。采用式(1)定义响应线性度,其中La和Lb为真空辐射定标时等效入瞳辐亮度的较小值和较大值,DNa和DNb为等效入瞳辐亮度为La和Lb时各像元输出信号的平均值,DN0为无辐射输入时,各像元输出信号的平均值。
式中,Fs 表示响应线性度。经分析,所有探测器模块定标曲线线性度均优于0.995,动态范围满足240—340 K要求,绝对定标精度0.82 K@300 K,均优于指标要求。典型增益和积分时间下D1—D8模块辐射定标曲线如图11 所示,根据国标GB/T 38236-2019方法计算该增益和积分时间下辐射定标方程和相关系数,结果如表7所示,相机响应特性较好。

图11 典型增益和积分时间下辐射定标曲线Fig.11 Radiometric calibration curve under typical gain and integration time

图12 热红外相机营口市区影像Fig.12 Infrared camera image of Yingkou urban aera
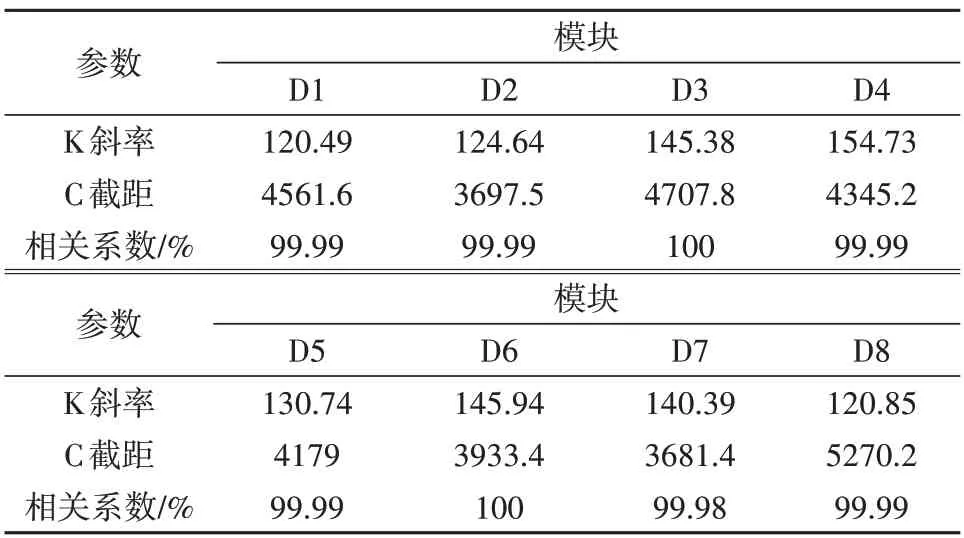
表7 辐射定标方程及相关系数Table 7 Radiometric calibration equation and correlation coefficient
4.3 环境试验
为了验证5 米光学02 星热红外相机结构稳定性和在轨温度稳定性,相机先后完成验收级振动试验和真空热平衡试验。相机主体振动试验获得3 个方向基频,分别为119.3 Hz(X 向)、43.3 Hz(Y 向)、33.69 Hz(Z 向),相机主体三向基频满足卫星对热红外相机主体提出的基频要求且与卫星频率错开。相机在验收级振动前后分别进行常温常压成像测试,D1、D2、D7、D8模块在常温常压下设计MTF 较低,无法进行MTF 测试,常温常压下D3—D6 模块MTF 测试结果如表8 所示,振动前后无明显变化。热平衡试验分别进行加热去污工况、低温瞬态工况、高温瞬态工况、高温瞬态侧摆26°工况测试,相机关键位置温度遥测结果表明,光机结构和探测器温度较为稳定,同时进行了不同工况下成像测试,像质变化较小,相机热稳定性满足要求。
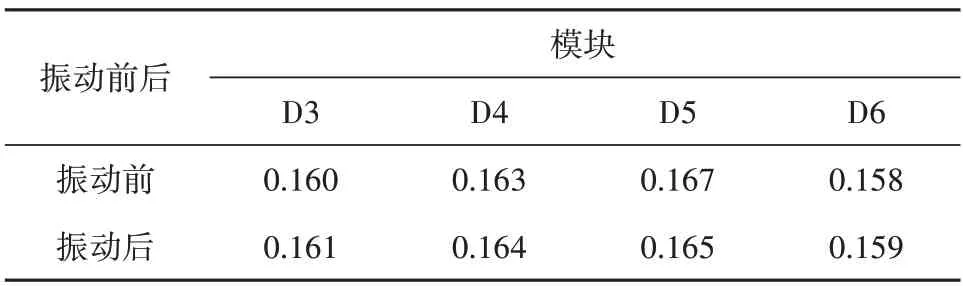
表8 振动前后MTF测试结果Table 8 MTF test results before and after vibration
5 在轨测试与应用
2022年1月25 日10:30,5 米光学02 星热红外相机首次开机成像,随后进入在轨测试阶段,2022年2月8日,对营口市区进行成像,图像质量优异、层次丰富、细节清晰。通过影像可以直接得到城市的温度分布,进而可以得到水流速、泥沙分布情况等信息,可以进行河流监测。
2022年1月到6月,5 米光学02 星热红外相机按照相关标准规范进行了成像性能测试、几何特性测试和辐射特性测试。相机增益、积分时间、行周期均在轨可调,调焦机构功能性能正常,星上定标功能性能正常,能够在轨稳定工作。
根据对已知位置的地面控制点进行成像测试相机幅宽和地面像元分辨率(于生全等,2017)。在大气透明度良好的情况下,获取300 K 附近高温和低温均匀目标影像数据,进行NETD 分析(陈静,2009)。按照国标GB/T 34509.2-2017 方法,对5 米光学02 星热红外相机进行在轨绝对辐射定标测试。热红外相机成像几何特性和辐射特性测试结果如表9所示,相机性能优异。
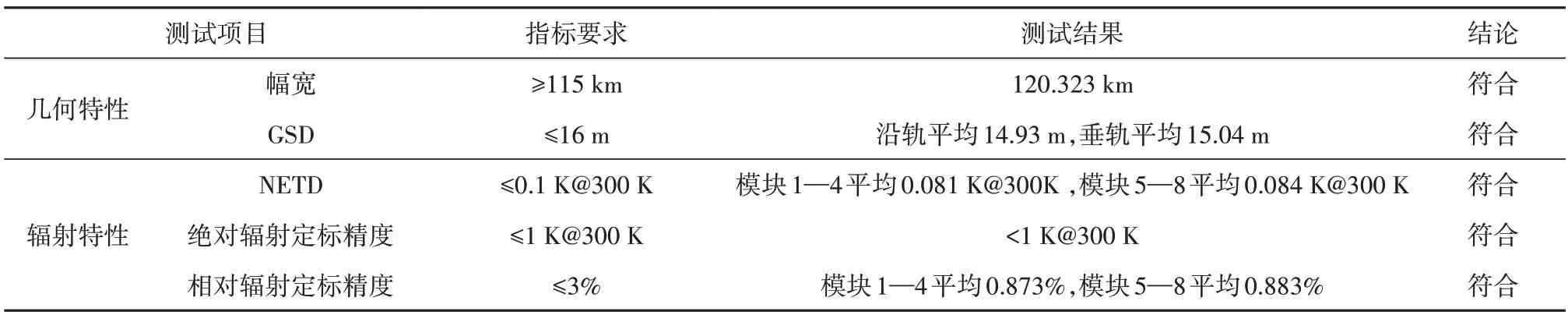
表9 热红外相机在轨测试结果Table 9 On-orbit test results of the thermal infrared camera
6 结语
本文介绍了5 米光学02 星主要载荷之一热红外相机的设计及实现情况。该相机具有高分辨率、高灵敏度和大幅宽的技术特点。相机具备在轨内黑体定标和调焦功能。相机研制过程中突破大口径宽视场低畸变自由曲面光学系统设计、高性能长线阵长波红外焦平面设计、长波红外低温光学设计和复杂红外光学系统装调等关键技术。热红外相机地面测试和试验充分,在轨图像几何性能和辐射性能优异。高分辨率热红外影像数据将有力支撑国土资源相关业务。5 米光学02 星热红外相机的研制,为后续同类载荷研制提供有力的技术支撑。
