基于双人零和博弈的孤岛微电网有界L2增益负荷频率控制
2024-03-07李寅生陈玉全黄浩乾
李寅生,王 冰,陈玉全,黄浩乾
(河海大学能源与电气学院,江苏省 南京市 211100)
0 引言
随着全球能源危机的加剧,扩大分布式能源的接入已成为电力系统的大趋势。由于微电网能为分布式能源提供良好的接口,微电网技术得到了广泛的关注和研究。微电网一般具有两种运行模式,即并网模式和孤岛模式[1-2]。在孤岛模式下,维持微电网本地频率稳定是保证电能安全供给的重要前提。由于孤岛微电网自身容量小且阻尼特性较弱,其电源侧与负荷侧的波动极易引起偏激的频率偏移。对于维持微电网频率稳定,加装储能装置是一种常用的手段,但大规模布局储能装置会增加建设成本。文献[3-4]提出了风电参与电网调频的方法,但新能源的不确定性注定其参与调频的自由度是有限的。目前的主流调频方式是负荷频率控制(load frequency control,LFC),即通过设计LFC 策略对发电机的出力进行控制,进而实时跟踪负荷侧变化,保证频率稳定在规定范围内[5-6]。
在微电网的LFC 中,比例- 微分- 积分(proportional-integral-derivative,PID)控制因其结构简单且易于实现的特点,成为最为主流的LFC 方法[7-9]。然而,PID 控制器的鲁棒性是其一大短板。考虑到PID 的缺陷,一些基于先进控制理论的LFC方法被广泛提出。文献[10]提出了基于模型预测控制的LFC 方法,提高了系统对负荷的跟踪和适应能力。文献[11]针对大规模风电接入的系统LFC 问题,提出一种基于自适应动态模型的在线强化学习方法,该方法结合模型预测控制进行实时决策,能有效跟踪风电输出功率的随机波动。文献[12]提出一种基于数据驱动的LFC 方法,有效提高了系统对负荷摄动和风电的消纳能力。以上方法虽然从不同方面提高了LFC 的性能,但也引入了相当的计算复杂度,且对系统的模型信息存在一定的依赖度。
针对具有建模误差的微电网系统,不依赖于模型信息的自抗扰控制(adaptive disturbance rejection control,ADRC)方法成为一种较优解。ADRC 作为一种扰动补偿控制方法[13],具有较强的抗扰性能和较低的设计复杂度,被广泛应用于发电系统的LFC[14-16]。 文献[14]针对含发电速率约束(generation rate constraint,GRC)的孤岛电网系统,设计了GRC 补偿的基于ADRC 的LFC 方法,并在仿真中验证了其出色的扰动鲁棒性。虽然ADRC方法能通过扰动观测器补偿匹配的不确定模型动态,但这一过程也会动态消去已知的标称模型,从而造成标称模型信息的浪费,以及增加观测器的负担。
实际上,合理利用微电网的标称模型设计保守性更小且具有某种鲁棒特性的LFC 策略无疑是更优的方案。文献[17]利用互联线性系统的标称模型信息和微分零和博弈理论,设计了满足有界L2增益的耦合衰减控制器。该控制器能将网络耦合和外部摄动对系统的影响抑制在预设的水平,并由此获得较强的鲁棒性能。这种方法为本文设计鲁棒LFC控制器提供了很好的思路。
如何更高效地处理微电网的内部模型误差和外部不确定新能源注入,实现高质量的LFC,目前依旧是领域内的一个重要难题。受上述工作的启发,本文提出了一种结合有界L2增益基线控制和扰动补偿的综合LFC 方法。首先,该方法从一个新的视角出发,将系统扰动定义为控制信号的对手玩家,利用微分博弈理论设计出满足有界L2增益条件的基线控制器。其次,针对微电网频率的二次调节,设计了基于五阶广义积分观测器(generalized integral observer,GIO)的扰动补偿控制,以保证稳态频率偏差的快速收敛。此外,本文考虑了GRC 问题,提出在GIO 中引入可调控制增益的抗发电速率约束(anti-generation rate constraint,anti-GRC)措施,保证了系统在触发GRC 时的稳定性。
1 孤岛微电网的LFC 全驱模型
不同于并网模式下大电网为微电网提供频率支撑,孤岛模式下的微电网需要依靠对自身发电单元的控制来建立频率支撑,以保证电源与负荷的平衡。主从控制[18]是孤岛微电网应用最为广泛的控制方式,即选择一个具备较快出力调节能力的电源作为主站,为微电网母线提供参考频率。这种控制方式简单、易于实行,在保证供电质量方面有较大优势。以附录A 图A1 的孤岛微电网为例,柴油发电机组作为主控电源,通过LFC 调节出力,为电网的频率提供支撑。本文以图A1 的孤岛微电网为原型设计LFC 控制协议,以实现对微电网频率的直接控制。
柴油发电机组的LFC 系统如图1 所示。该系统以文献[19]中的线性模型为原型,图中的微电网模块描述了电网的频率响应动态。作为一个在平衡点处线性化的小信号模型,其忽略了部分非线性动态,这对于不依赖于准确建模的鲁棒LFC 方法是可取的。但考虑到负荷侧和新能源接入侧的摄动容易引起频率偏离平衡点,线性化的小信号模型并不足以完整描述系统的运动。为了更严谨地分析LFC 系统的动态模型,本章考虑了由非线性动态和参数不匹配等构成的系统建模误差。
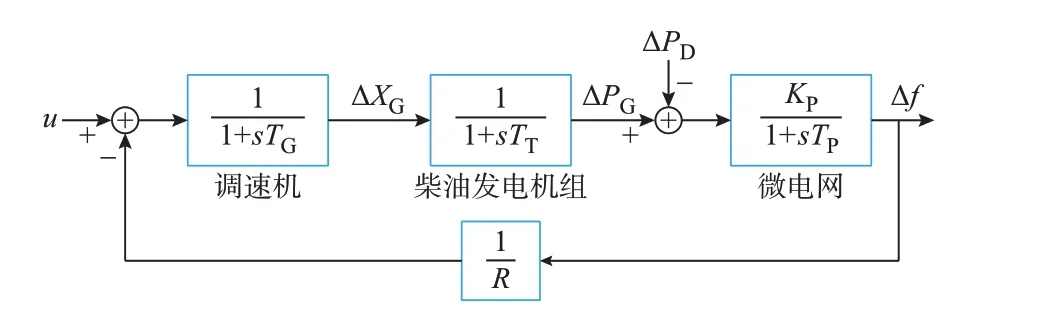
图1 柴油发电机组的LFC 系统Fig.1 LFC system of diesel generator set
本文将频率二次控制部分的积分单元取消,并引入建模误差,得到孤岛微电网LFC 系统的动力学方程如下:
式中:Δf为微电网频率偏差;ΔPG为发电机输出增量;ΔXG为调速器阀门位置的变化;ΔPD=ΔPd-ΔPW-ΔPV-ΔPS,其中,ΔPd为总负荷的变化,ΔPW为风电注入功率的变化,ΔPV为光伏功率的变化,ΔPS为储能充放电功率的变化;TP为微电网时间常数;KP为微电网增益系数;TT为发电机时间常数;TG为调速器时间常数;u为LFC 控制信号;R为调速器的调速参数;Λf、ΛP、ΛX为系统的建模误差。
值得注意的是,上述定义的系统建模误差包含了未建模的非线性动态、参数误差和汽轮机发电速率约束等。以ΔPG的动态方程为例,存在着发电速率约束|ΔṖG|≤μ,则建模误差ΛP可写成:
式中:μ为发电速率上限。
在式(1)系统中,光伏和风电系统均运行在最大功率跟踪点,储能系统采取独立的充放电功率控制,三者均以输出功率的形式影响微电网频率,但其内部状态均与LFC 系统不存在耦合。因此,为简化系统的建模,本文将光伏、风电、储能系统和负荷的功率变化集成为外部输入信号ΔPD=ΔPd-ΔPWΔPV-ΔPS。不难看出,ΔPD实质上是经储能系统补偿后的不平衡功率。
由于建模误差Λf、ΛP与控制输入u的信道不匹配,无法引入等效补偿将Λf、ΛP对系统的影响抵消,这也是本文工作的一大难点。此外,LFC 的目标是将频率偏差Δf稳定在原点,其重点不在于中间状态ΔPG和ΔXG。为了更直观地针对Δf设计控制器,本文将动态方程式(1)转换为全驱模型,过程描述如下。
对式(1)中第1 个等式两边同时求导,并将式(1)中的第2 个等式代入,得到
根据式(1)的第1 个等式,易知
综合式(1)的第2 个等式及式(4)和式(5),可得
进一步,对式(3)两边同时求导,并结合式(1)中的第3 个等式,可得
将式(4)—式(6)代入式(7),即可获得关于输出Δf的全驱模型方程,如式(8)所示。
式中:Λ为集成外部输入和建模误差的综合扰动,其表达式如式(9)所示。
以上综合扰动总结了外部功率不平衡、参数误差、未知非线性动力学和柴油机GRC 等因素对系统频率的影响。
动态方程式(8)可以重写为以下标准形式:
式中:x=[x1x2x3]T=[ΔfΔḟ Δf̈]T,为全驱系统的状态;A为系统矩阵;Bu为控制输入矩阵;BΛ为扰动输入矩阵。
式(10)中的各矩阵具体表达如下:
需要说明的是,与包含中间状态的模型(式(1))相比,全驱模型(式(10))无疑能更好地反映LFC 的控制目标,即对频率偏差的调节,这为后续提出的博弈性能指标提供了铺垫。此外,不难看出全驱模型(式(10))使系统的不确定综合扰动与控制信道相匹配。也就是说,可以通过同一信道对综合扰动Λ进行等效补偿,这为后续的干扰补偿控制设计提供了方便。
2 基于双人零和博弈的有界L2 增益基线控制器
为了更有效地处理综合扰动,本章将从博弈论和最优控制的角度出发,以全驱模型(式(10))为基础,推导出满足有界L2增益条件的基线控制器。
2.1 关于扰动抑制的有界L2增益问题
本节的有界L2增益问题基于二次性能指标,对于式(10),期望设计基线控制器u=uˉ以满足以下关于扰动抑制的有界L2增益条件:
式中:β(⋅)为有界的函数,且满足β(0)=0;x(0)为系统式(10)的初始时刻状态;T为积分时间;Q>0,为待设置的权重矩阵;Ru>0、RΛ>0,为待设置的参数;γ>0,为L2增益,代表u=uˉ对综合扰动的抑制性能水平,γ越小则反映扰动抑制能力越好。
2.2 有界L2增益问题的双人零和博弈解法
针对条件式(11),定义以下性能指标:
式中:J(⋅)为零和博弈的性能函数。
然后,从全驱系统式(10)中提取名义模型信息,并定义以下虚拟的双玩家微分博弈:
根据文献[17]中的定理1,2.1 节中描述的有界L2增益问题的解可以等价于基于性能函数式(12)的双人零和博弈式(13)的纳什均衡解,即
定义微分博弈式(14)的值函数如下:
对式(16)两端沿式(13)进行求导,可以导出以下偏微分方程:
式中:∇V=∂V/∂x,为梯度向量;V(0)为式(16)定义的值函数在x=0 处的值。
定义以下Hamilton 函数:
同时,根据最优性原理,有
定义博弈的纳什均衡解为:
综合式(17)和式(19)得到耦合HJI(Hamilton-Jacobi-Isaacs)方程如下:
式中:∇V*为最优值函数V*对状态x的梯度;=
引理1 的证明详见附录B。
在以上微分博弈中,与微电网综合干扰Λ对应的虚拟玩家Λ̂作为基线控制uˉ的对手玩家,被假设以最大化值函数V为博弈目标。然而,实际的综合干扰Λ并不一定能使值函数最大化。换而言之,从该零和博弈中求解得到的基线控制是基于最坏的情况。以下定理1 表明,HJI 方程(21)的解等价于有界L2增益条件式(11)的解。
定理1假设耦合HJI 方程(21)存在光滑的正定解V*。针对电力系统全驱模型(式(10)),选定控制策略为则对于任意综合扰动Λ∈L2[0,∞),有界L2增益条件式(10)恒成立。
定理1 的证明参见文献[17]。从定理1 可以看出,通过求解HJI 方程(21),可以得到使有界L2增益条件式(11)恒成立的基线控制器uˉ*。
2.3 等价的代数Riccati 方程
在本节中,耦合HJI 方程(21)将被等价转换为一个代数Riccati 方程。定义式(21)的解为二次值函数V*=xTPx,P为待解的对称正定矩阵。根据式(19)可知:
将式(23)和V*=xTPx代入式(21),可得
以上方程可等价为:
进一步,式(25)可写成以下的代数Riccati方程:
式中:B=[BuBΛ];R=diag[Ru/2,-γ2RΛ/2]。
求解代数Riccati 方程式(26)和式(23)的第1 个等式,即可得到满足有界L2增益条件的基线控制器。
针对实际的微电网系统,基线控制器的参数Q、Ru、RΛ和γ应根据工程需求进行选择。其中,Q的对角元素依次象征着全驱系统状态Δf、Δḟ和Δf̈在值函数中的权重,如果要求较高的频率偏差收敛速度,则应将Q的第1 个对角元素设置成较大的值。如果要求低控制能耗,则应设置较大的Ru。此外,基线控制器对综合扰动Λ的抑制水平与参数RΛ和γ相关,在实际工程应用中,应在式(26)有解的前提下,向下搜索小的参数γ,以提高基线控制器对综合扰动的抑制水平。
在综合扰动的L2范数有界的条件下,以上推导得到的基线控制器只能保证式(10)的最终一致有界(ultimately and uniformly bounded,UUB)稳定性。换而言之,基线控制器只能实现对频率的一次控制。此外,以上基线控制器需要频率偏差的一阶和二阶导数作为状态反馈,这些均无法通过传感器获得。综上所述,有必要设计一个能够实时估计状态和动态扰动的观测器,并引入扰动补偿控制来实现频率的二次控制。
3 GIO 及其anti-GRC 方案
根据分离原理,干扰补偿控制器可以独立于基线控制器进行设计。式(9)所示的综合扰动Λ包含了动态且复杂的高阶微分信号。应用最广泛的扰动观测器是扩张状态观测器(extended state observer,ESO),但对于动态的干扰,它只能保证估计误差的UUB 稳定性,而不是渐近稳定。本章将针对孤岛微电网LFC 系统,在ESO 的基础上进行改进,设计了一种新型观测器——GIO,用于在线观测状态和综合扰动。
3.1 五阶GIO
将式(10)的综合扰动Λ及其导数̇扩张为新状态,得到以下五阶扩张系统:
针对式(27)设计以下五阶观测器:
将观测器的极点均配置在-w上,即
式中:I为单位矩阵;s为频域变量。
由此得到观测器增益配置方式如下:
上述设计的观测器被称为GIO。GIO 在ESO的基础上扩张了一阶状态,在末端引入了一个积分链,目的是消除对动态扰动的稳态估计误差。需要注意的是,观测器的阶数并非越高越好,阶数越高则意味着其对量测噪声的敏感度也会越高。本文设计的GIO 在噪声敏感度和动态跟踪性能之间做出了很好的折中,在保证一定抗噪性能的前提下,有效消除了系统对动态扰动的跟踪误差。
定理2将GIO 的极点配置在-w<-1/2,如果全驱系统式(10)的综合扰动Λ的二阶导数满足以下有界条件:
ρ是一个正常数,则GIO 的估计误差向量最终一致有界并满足
定理2 的证明见附录B。
从式(33)可以看出,GIO 的误差向量将最终一致收敛于以下原点的有界邻域:
实际上,从定理2 及其证明不难看出,GIO 的动态性能与其自身观测增益呈正相关,适当提高GIO的观测增益可以提高观测器的跟踪能力。同时,受限于物理条件和技术水平,实际测量过程会产生一定强度的随机噪声。这些随机噪声与真实输出一同被传递至GIO 的高增益误差反馈通道。因此,增大观测增益会导致观测器的噪声敏感度升高,加剧系统的噪声污染。综上所述,GIO 的观测增益需要在动态性能与噪声敏感度之间作出折中。
3.2 干扰补偿控制器
引入GIO 的状态估计以取代实际状态反馈,得到基于估计状态的有界L2增益基线控制器:
式中:Θ1=diag[1,1,1,0,0]。
另外,基于GIO 对Λ的估计,设计以下干扰补偿控制器以实现对微电网频率的二次控制,即
式中:Θ2=[0 0 0 -TPTTTG/KP0 ]。
将基线控制器式(35)与干扰补偿控制器式(36)相结合,即可得到综合LFC 控制器:
图2 展示了综合LFC 控制器的整体框图。

图2 综合LFC 控制器的整体框图Fig.2 Overall block diagram of integrated LFC controller
定理3综合LFC 控制器(式(37))能保证系统式(10)的UUB 稳定性,且满足:
式中:λmax(⋅)和λmin(⋅)分别为矩阵的最大和最小特征值;κ和χ具体表达式为
定理3 的证明详见附录B。
由定理2 和定理3 可以推断,综合LFC 控制器式(37)能保证系统式(10)的状态最终一致收敛于以下原点的有界邻域:
3.3 针对GIO 的anti-GRC 方案
在微电网LFC 中,GRC 是不可忽视的。干扰补偿控制器固然能对考虑了GRC 的综合扰动Λ进行补偿,但Λ实际上只描述了GRC 对频率偏差Δf的影响。相应地,干扰补偿控制器u͂也仅等价补偿了GRC 对Δf的影响。由于信道的不匹配,u͂无法抵消GRC 对中间状态ΔPG和ΔXG的影响。当|ΔṖG|触及上限μ并被限制时,LFC 控制信号对微电网的作用将受限而被“打上折扣”。换而言之,发电速率受限下的实际输入系数应比原值小。但GIO 的输入系数是固定的,这就会对导致GIO 对综合扰动Λ过估计。进一步,对Λ的过估计会造成干扰补偿控制的增强,加剧GRC 对系统的影响。这是一种恶性循环,如图3 所示,这种情况极易导致微电网频率振荡。如果不能及时脱离GRC,LFC 系统则会陷入上述循环直至系统崩溃。

图3 GRC 对微电网的影响Fig.3 Effect of GRC on microgrid
针对发电速率受限的微电网系统,本文提出了一种可调观测器输入增益的anti-GRC 方案。将理想发电速率与约束作比,并反馈至GIO 用于调整输入增益。改进后的GIO 如下:
式中:ν为可调输入增益,有
式中:ΔṖGL=-(TT)-1ΔPG+(TT)-1ΔXG,为理想发电速率;k为可调参数。
增大k值可以提高系统在触及GRC 时的稳定性,但同时也可能导致稳态误差的产生。在GRC 宽松的一般工况下,将k设为1 即可满足实际需求。
与文献[14]相比,所提出的anti-GRC 方法由于采用了指数的增益调节模式,其根据实际GRC 情况做出调整的能力更强。
4 算例仿真
采用Simulink 搭建孤岛微电网LFC 模型。该微电网以额定功率为16 MW 的柴油发电系统为主,在末端辅以不确定的风电和光伏功率注入。额定负荷为13 MW,并增加一个额外的负荷摄动以测试系统的抗扰动性能。另外,储能系统承担微电网10%的功率不平衡补偿,即
微电网以隔离的孤岛模式运行,具体的模型参数如表1 所示。将综合LFC 控制器的参数设置为:Q=diag[30,0.1,0.1],Ru=0.1,RΛ=1,γ=0.001 8,w=30,k=1。
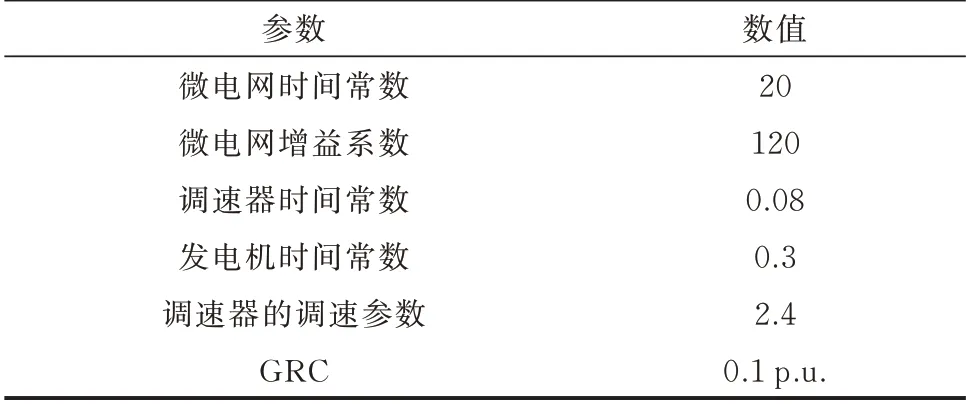
表1 孤岛微电网模型参数Table 1 Model parameters of islanded microgrid
本文引入文献[14]带有anti-GRC 的ADRC 控制器(antiGRC-ADRC)和文献[9]的内模PID 控制器(IMC-PID)作为比较方案。
4.1 不触及GRC 下的稳定性分析
在负荷侧施加0.001 5 p.u.的小阶跃摄动,微电网频率响应如图4 所示。可见,所提出的综合LFC方案虽然出现了小幅度的超调,但其在负载扰动发生后1 s 内即可使频率恢复。相较于另外两种方法,无论是阶跃负荷引起的频率下降还是调节时间,均有较为明显的改善。GIO 和ADRC 的ESO 估计的综合扰动如附录A 图A2 所示。由于综合扰动内含负荷扰动的导数项,对于阶跃的负荷摄动,GIO 的扰动估计无疑比ESO 更加接近实际值。

图4 0.001 5 p.u.的阶跃负荷摄动下的频率响应Fig.4 Frequency responses under step load perturbation of 0.001 5 p.u.
为测试综合LFC 方案应对不确定新能源功率注入的能力,引进了以下短周期波动的快变量风电注入和长周期波动的慢变量光伏功率注入(均为标幺值):
不确定新能源功率注入下的微电网频率响应如附录A 图A3 所示。从图中可以看出,对于波动的新能源注入,本文所提出的综合LFC 拥有明显优于其他两种方法的阻尼特性。
进一步,测试有界L2增益基线控制器的参数γ对性能的影响。将基线控制器的γ分别设置为0.001 8、0.002 0 和0.005 0,施加0.003 p.u.的阶跃负载摄动,得到的系统响应如附录A 图A4 所示。结果表明,γ反映了基线控制器对扰动的抑制水平,γ越小则系统的抗扰动性能越好。因此,设计基线控制器时,应在式(26)存在正定解的前提下,尽量搜索小的γ以保证系统的强抗扰性能。
4.2 触及GRC 下的稳定性分析
在负荷侧分别施加0.07 p.u.和0.10 p.u.的大阶跃摄动,由此得到的系统响应如图5 所示。在强负荷干扰下,拥有扰动补偿措施的综合LFC 和antiGRC-ADRC 的性能表现要远优于IMC-PID。其中,所提出的综合LFC 展现了最优的性能,即最短的频率恢复时间和最小的频率下降。另外,在触及GRC 后,综合LFC 能在较短的时间内脱离约束状态。附录A 图A5 展示了在突加0.07 p.u.负荷情况下,有anti-GRC 措施和没有anti-GRC 措施的综合LFC 频率响应。结果表明,本文提出的anti-GRC 措施能有效处理GRC 对系统的影响,保证系统的稳定性。
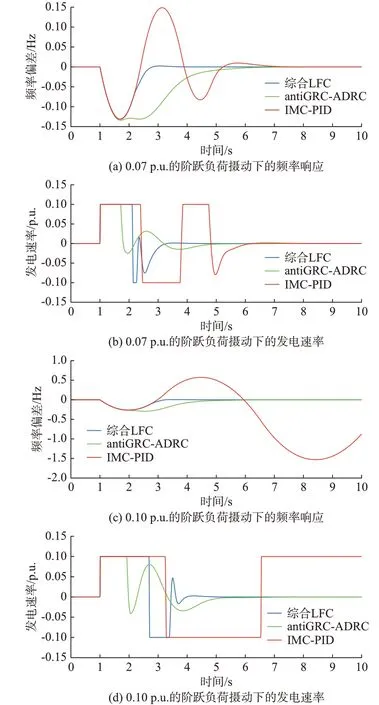
图5 大阶跃负荷摄动下的系统响应Fig.5 System responses under large-step load perturbation
进一步,提高不确定新能源的渗透率,引进以下增强的周期波动风电和光伏注入(均为标幺值):
得到的频率响应如附录A 图A6 所示,具体仿真数据被列于表2。从结果来看,在提高新能源渗透率和波动强度的工况下,所提出的综合LFC 依旧展现出3 种方法中最优的阻尼特性。

表2 不确定新能源引起的频率波动数据Table 2 Data of frequency fluctuation caused by uncertain renewable energy
4.3 系统参数不匹配下的稳定性分析
为测试综合LFC 方法的参数鲁棒性,将微电网系统的所有参数值提高50%,保持控制器的参数不变。在负荷侧施加0.07 p.u.的阶跃扰动,系统频率响应如图6 所示。与图5(a)对比可知,综合LFC 与antiGRC-ADRC 两种方法基本不受变动的系统参数影响。反观IMC-PID 控制,由于依赖于准确的模型信息,模型参数的变动导致其性能下降,最终在GRC 的加持下系统变得不稳定。

图6 微电网参数不匹配工况下的系统响应Fig.6 System responses with mismatched parameters of microgrid
5 结语
针对含建模误差和新能源接入的孤岛微电网系统,本文提出了有界L2增益基线控制结合扰动补偿控制的综合LFC 方法。这种方法将孤岛微电网系统等价成一个双人零和微分博弈,由此推导出满足扰动有界L2增益条件的基线控制。针对频率的二次控制,设计了GIO 以实现对系统状态的估计和扰动的补偿,并引入anti-GRC 措施以保证GRC 下的稳定性。通过算例仿真验证了所提方法的有效性,得到以下结论:
1)在不触及GRC 的弱负荷和新能源摄动的工况下,所提出的综合LFC 方法具有较优的频率恢复能力和阻尼特性。通过比较不同γ下的频率响应,验证了有界L2增益基线控制的扰动抑制性能与参数γ的相关性。
2)在触及GRC 的强干扰影响下,综合LFC 方法依旧能维持稳定性,发电速率能自主脱离约束状态。
3)在系统参数不匹配的工况下,综合LFC 方法的性能并没有出现明显的下降。可见,所提出的综合LFC 方法具有较好的参数鲁棒性。
本文主要研究了孤岛模式下的微电网综合LFC 控制策略,并未对目前受到广泛关注的多端互联微电网的LFC 进行深入研究。本文所述的综合LFC 方法能否推广至多端互联微电网系统,仍有待后续进一步研究。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。