捷联惯导系统IMU误差特性分析
2024-02-21徐开俊孔令兵
徐开俊,董 韵,杨 泳,孔令兵,魏 阳
(中国民用航空飞行学院 飞行技术学院,四川 广汉,618307)
0 引言
现代民用航空器导航是利用各类机载传感器获得的测量数据得到运动载体的位置、速度和姿态等运动参数的过程。惯性导航系统由于具备独立自主、输出信息丰富、动态响应快、短时精度高等优点,已经成为机载组合导航系统设备中重要的组成部分,在无人机、通航、军民航领域均得到广泛的应用。
惯性导航系统的误差是系统解算出的导航参数与真实导航参数之间的偏差,包含经度误差δλ、纬度误差δφ和高度误差δh在内的位置误差,东向速度误差、北向速度误差和天向速度误差在内的速度误差,以及导航推算坐标系与参考坐标系之间姿态角误差。捷联惯性导航系统的误差具有高维、时变、多源等特点,其形成受多种因素影响,例如传感器本身的信号噪声、温度变化、高频振动、电磁干扰、高动态等,这些因素对误差的影响异常复杂且互相作用,导致精确建模和校准十分困难。目前,如何进一步优化惯性导航系统误差已经成为研究和发展惯性导航及组合导航的主要方向之一[1-4]。
在捷联惯导惯性测量单元(Inertial Measurement Unit,IMU)误差方面,众多学者开展了持续研究。2005年,闫海蛟等[5]在静基座下建立误差仿真模型,针对初始值误差、加速度计零位误差以及陀螺常值漂移三种误差的相互耦合及周期振荡特性进行了研究分析;2012年,关珊珊等[6]研究了动基座条件下的陀螺常值零偏与随机游走误差特性,表明随运动的剧烈程度增加,动基座系统呈现明显的震荡周期误差;张红良[7]研究了IMU标定、零速修正和惯导系统全局可观性分析等误差参数估计方法,为解决陆用高精度激光陀螺捷联惯导性能提供可行的精度改进方案;研究者对陀螺和加速度计常值漂移、安装误差、标度因数误差特性在单轴、双轴旋转下的调制情况进行了仿真研究[8-10];2020年,徐志浩等[11]研究了载体初始姿态对单轴旋转惯导系统误差传播特性的影响;2022年,严恭敏等[12]对精度超过0.01 nm·d-1的导航需求,从地球自转角速度模型参数出发,给出优化传统地球自转角速度模型误差的表达式,并进行了仿真验证。
可见在捷联惯导IMU误差模型、元器件标定、仿真测试及传播特性方面,之前的学者已完成大量的研究工作并取得丰硕的研究成果,但这些研究大都聚焦于主要误差,例如陀螺随机游走和惯性器件常值零偏两大类,而对于其他种类的误差往往疏于整理,对惯导系统的误差特性也并没有提供系统性的或者直观的图像说明。因此,本文旨在对系统所涉及的误差进行全面梳理,并对其中的主要误差进行分析,整理出更加完善的惯性导航系统误差特性,为后续进一步优化捷联惯导误差模型及建立组合导航理论奠定基础。
1 捷联惯导IMU误差原理分析
1.1 捷联惯导系统误差模型
典型惯性导航系统的组成框图如图1所示。捷联惯导系统的组成主要包括:加速度计、陀螺仪和温度传感器组成的IMU测量单元,内嵌航位推算算法的IMU处理器,校准参数存储器,高精度时钟基准和相关电源。在IMU测量单元误差确定的情况下,给定初始条件或上一时刻的导航参数,可以逐步推进计算下一时刻的位置、速度和姿态等导航参数。
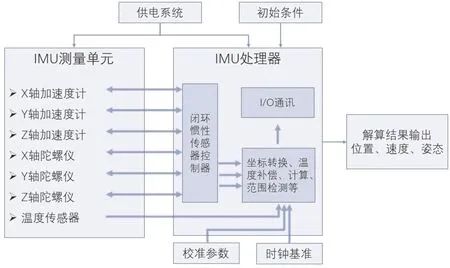
图1 典型惯性导航系统的组成框图
在民用航空领域航空器低速机动飞行时,可以假定捷联惯导姿态误差角是小角度,推导得到线性近似的捷联惯导误差方程组[13]。
(1)姿态误差方程
(1)

本文导航坐标系选取为东北天(ENU)地理坐标系。
(2)速度误差方程
(2)

(3)位置误差方程
(3)
(4)
(5)

1.2 捷联惯导系统IMU误差分类
惯性导航系统的误差主要由IMU误差、初始化误差和算法误差三部分组成。初始化误差指给定的初始位置、速度和姿态所导致的导航参数推算误差,一般而言,初始化误差可通过滤波算法的收敛特性予以控制或消除;算法误差主要包括导航方程时间离散化误差、模数转化采样间隔误差、重力模型误差、计算舍入误差以及时间基准误差等.当前随着计算机技术的发展,成熟的捷联惯导算法误差可控制在总误差的5%以内。因此,捷联惯导IMU误差是系统的重要误差项,其特性对整个捷联式惯性导航系统的精度起着决定性影响。
对于捷联惯导IMU误差而言,按照载体的运动状态分为静态误差和动态误差。静态误差指惯性测量单元IMU在通电且保持静止状态条件下,仍会产生与理想静止状态输出不完全一致的实际传感器输出偏差,属于加性误差,例如零位漂移和随机游走噪声误差;动态误差则是在系统运动状态下表现出来的实际输出值与理想输出值之间的偏差,其影响通常以误差系数的形式作用在输出值上,导致输出值与真实值之间存在某种比例关系,因此属于乘性误差,常见的动态误差包括比例因子误差、非正交性耦合误差等,捷联惯性导航系统误差分类图如图2所示。
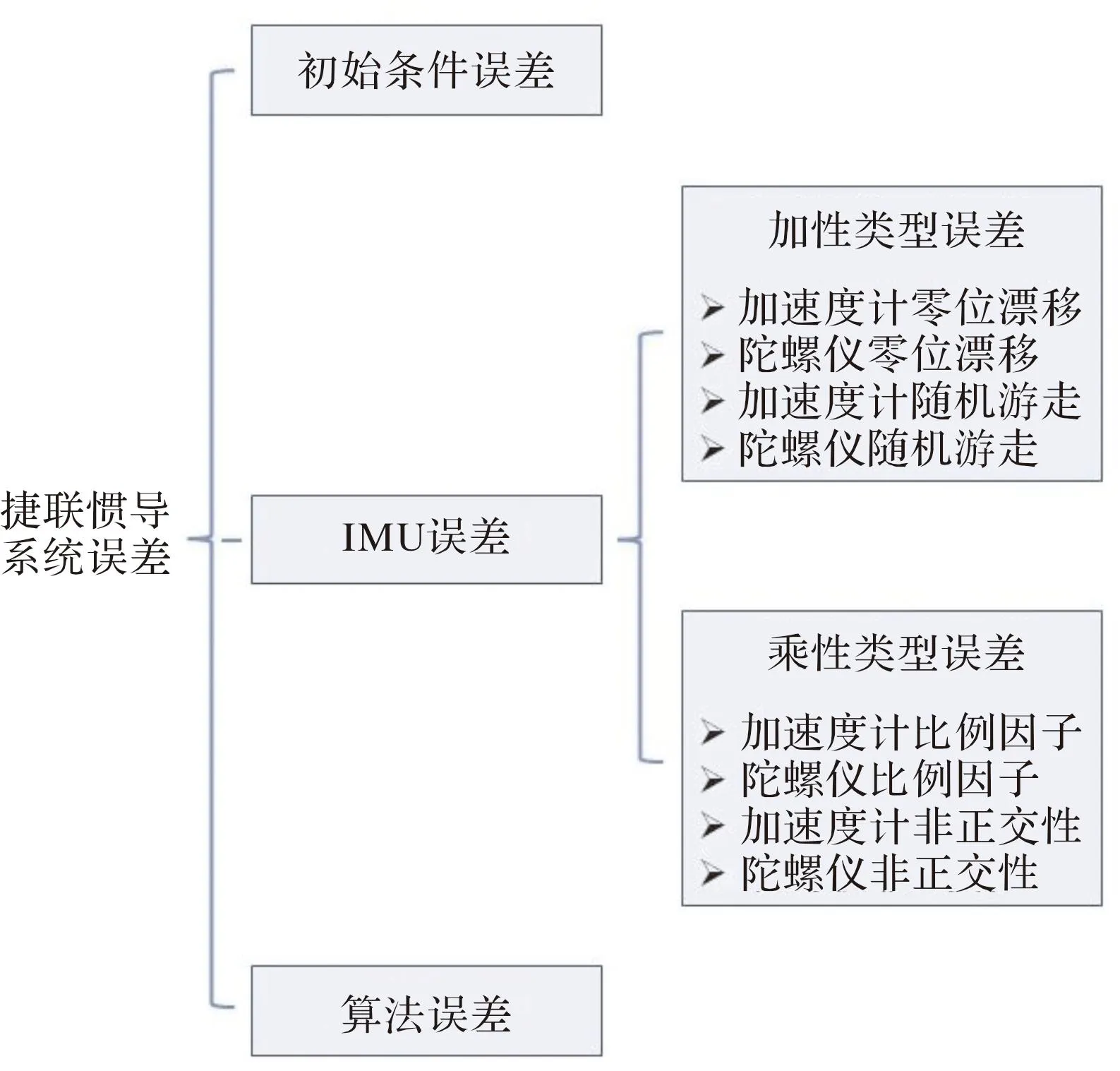
图2 捷联惯性导航系统误差分类图
对惯性测量单元IMU而言,零位漂移又称漂移率,指在系统上电后保持静止条件下,单位时间内固定不变的测量误差值,其对后续导航过程的影响也相对固定,现今民用航空领域上常用的导航级别惯性导航系统中,陀螺漂移率约0.015 deg·hr-1,加速度计漂移率在50 μg到100 μg之间。随机游走误差由惯性测量传感器自身的白噪声积分产生,在短时间尺度上呈现随机波动,长时间尺度上呈现不断增加的漂移趋势。对陀螺仪输出的角速度白噪声进行积分可获得角度随机游走,对加速度计输出的比力白噪声误差进行积分可获得速度随机游走,单位分别为deg·hr-1和为μg·Hz-1;比例因子误差表征测量值与真实值之间存在固定比例关系,由于惯性测量传感器本身的设计精度或外界温度变化等因素,导致在实际输出信号测量时与理论输出值之间发生比例关系的偏离。非正交性误差指惯性测量IMU传感器在运载体上的安装位置与理想的严格正交三轴位置之间的角度偏差,由于传感器设备本身的缺陷导致IMU传感器安装非完全正交,致使任何一轴输出结果都会受到另外两轴分量的影响,一般导航级别惯性导航系统中陀螺仪的非正交型误差在50~200 arcsec之间,影响也远小于零位漂移误差。
2 误差等级及主役机型误差
捷联惯导系统按照定位能力和IMU主要误差分为战略级、导航级、战术级三种级别,捷联惯性导航系统精度等级如表1所示。

表1 捷联惯性导航系统精度等级
目前,中高精度的激光陀螺捷联惯导系统在民航领域得到广泛应用,根据国内外公开资料显示,几种主役民航机型的捷联惯导精度以及陀螺精度汇总如表2所示。

表2 主役民航机型的捷联惯导精度以及陀螺精度汇总
3 仿真分析
矩形起落航线是飞行学员学习飞行的基础科目,包括起飞、上升、转弯、平飞、下滑、着陆等重要飞行机动过程,由5个直线段和4个转弯组成。本文针对简化的水平矩形起落航线进行模拟仿真,并没有涉及高度变化,仿真步长0.1 s,总共仿真时间712 s,无误差模式的起落航线仿真图如图3所示,起落航线在东北水平面上投影形成圆边矩形。

图3 无误差模式的起落航线仿真图
在上述仿真基础上,设置捷联惯导IMU误差后进行仿真。按照导航级捷联惯导系统的IMU误差参数进行设置:陀螺仪零位漂移1 deg·hr-1,加速度计零位漂移100 ug,陀螺仪随机游走0.1 deg·hr-1,加速度计随机游走100 ug·Hz-1,陀螺仪非正交误差角10 arcsec,加速度计非正交误差角10 arcsec,陀螺仪尺度因子10 ppm,加速度计尺度因子20 ppm,设置初始条件为东向、北向失准角各0.5′,天向失准角5′,初始速度误差0.1 m·s-1,初始位置误差10 m。导航级IMU误差参数下的起落航线仿真图如图4所示。对比图3和图4可明显看出,在IMU误差的影响下飞行轨迹随时间有明显的偏离趋势。
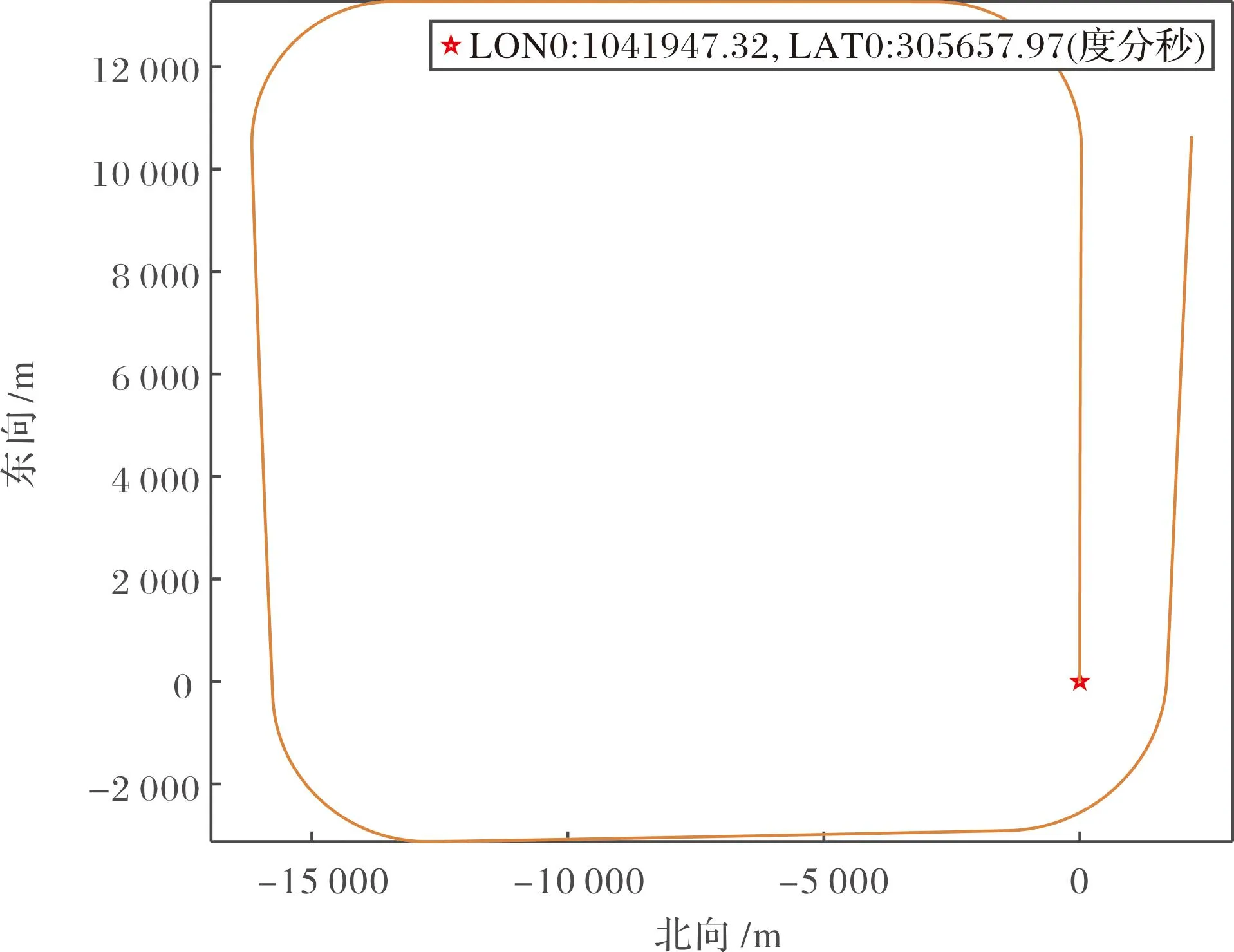
图4 导航级IMU误差参数下的起落航线仿真图
导航级IMU误差参数下起落航线姿态误差如图5所示。图5(a)展示的是无误差理想轨迹随时间变化的姿态和含有惯导误差的姿态定位结果,可以看出两者的姿态变化趋势基本吻合,均符合矩形起落航线仿真场景,但由于航向角误差导致在三边过程中航向角出现从+180°到-180°的跳变。图5(b)展示的是东、北、天三个方向的失准角误差变化,可以看出三个方向的失准角误差在起点处与初始设置相符,为东向、北向各0.5′,天向5′,之后各自逐渐发散。

图5 导航级IMU误差参数下起落航线姿态误差
导航级IMU误差参数下起落航线速度误差如图6所示。可以看到东、北、天三个方向的速度误差初值从0.1 m·s-1开始,东、北、天三个方向速度误差在轨迹终点处分别达到了1.4 m·s-1、4.3 m·s-1、0.7 m·s-1左右。
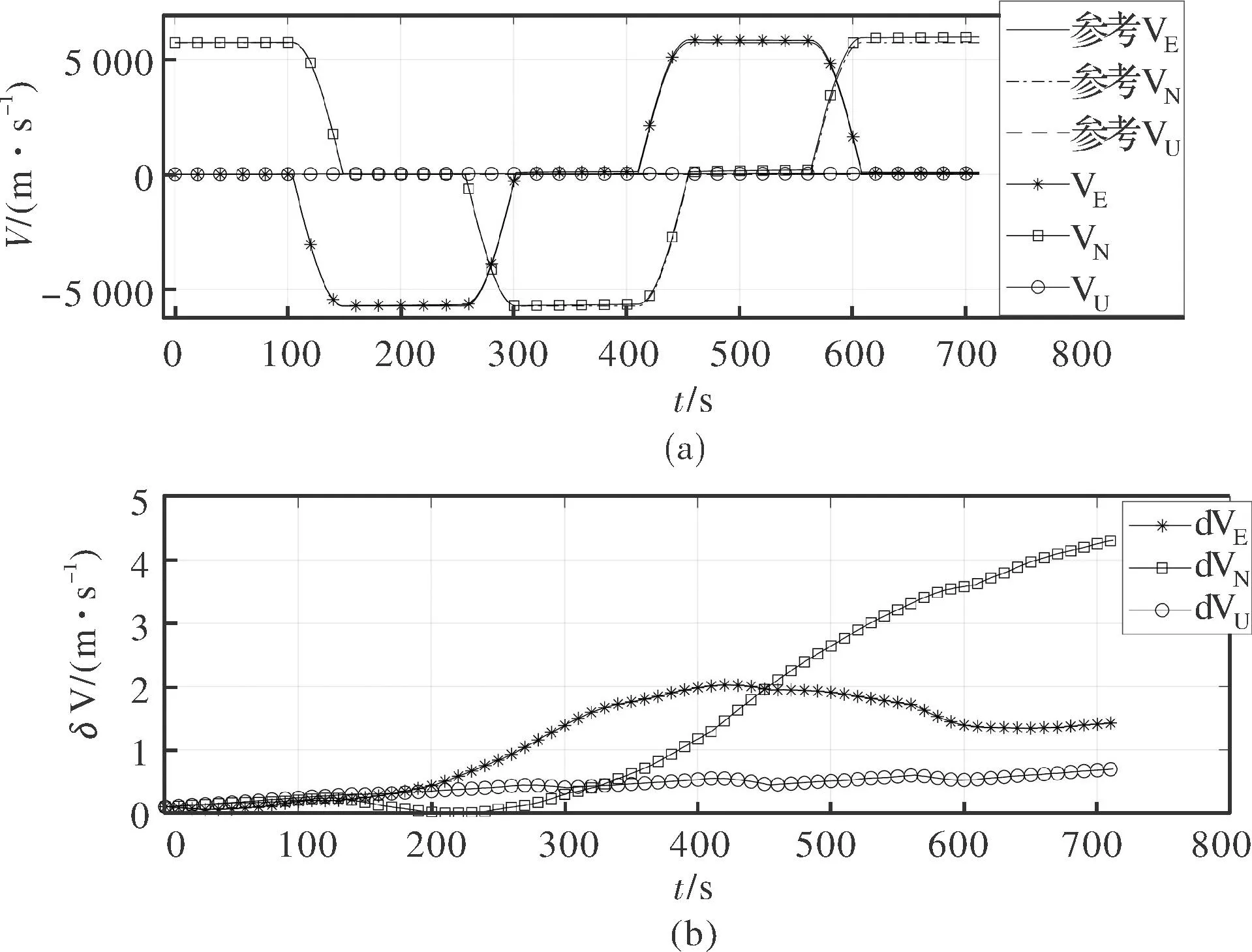
图6 导航级IMU误差参数下起落航线速度误差
导航级IMU误差参数下起落航线位置误差如图7所示。可以看出位置误差的发散在经纬方向上呈由慢到快的趋势,在轨迹初期误差增长较为平缓,150 s处开始快速发散,此时飞行轨迹中转弯基本结束,之后经纬方向误差发散速度明显增长,在轨迹终点处到达800 m左右,而高度误差全程在5 m以内缓慢波动,这很可能是仿真过程并没有高度变化导致。

图7 导航级IMU误差参数下起落航线位置误差
4 结论
本文对捷联惯导的误差模型进行了细致梳理,介绍了惯性导航系统的误差分类,重点阐述了捷联惯导IMU误差分类,并对重点类型进行详细说明。对战略级、导航级及战术级三种级别的捷联惯导系统的定位能力和IMU误差特性进行分析,并明确了几种主役民航机型的惯导精度以及陀螺精度。在此基础上,对矩形起落航线在无误差的理想模式进行轨迹仿真,并进一步设置导航级捷联惯导IMU误差参数后进行仿真,对比分析得出IMU误差诱使飞行轨迹随时间有明显的偏离趋势。对飞行轨迹的姿态、速度、位置误差情况进行三维方向的详细分析,得出在本文仿真环境下高度误差波动始终非常平稳,而水平方向误差在一定时间后大幅度发散,表现出惯性导航性能的固有缺陷。
