圆柱壳结构干扰自适应减振控制研究
2024-01-03李科宇陈跃华
杨 松,李科宇,2,张 刚,陈跃华,冯 锐
(1. 宁波大学 海运学院,浙江 宁波 315211;2. 宁波舜宇光电信息有限公司,浙江 宁波 315211)
0 引 言
圆柱壳结构作为舰艇推进器、潜艇舱室等水下航行器基础结构,广泛应用于海洋工程领域[1-2]。其受内外部复杂载荷激励产生的振动,影响机械结构寿命,降低设备可靠性,且严重恶化工作人员工作环境。
在船舶与海洋工程领域,圆柱壳作为大型机械结构,尺寸达数百米。在保证圆柱壳振动控制任务的同时,需考虑传感器和执行器在空间上的分布问题,否则将导致控制系统庞大复杂[3]。对大型结构的振动控制而言,分布式减振控制可降低中心控制器的计算负荷,控制节点扩展灵活[4],是复杂激励智能减振的研究热点。目前分布式减振控制系统大多应用可控性、可观性等性能指标进行作动器位置设计。以H∞、衰减率等控制性能指标进行减振控制器设计,同时考虑分布式控制系统中多智能体的一致性问题,使控制器具有更好协调控制性能[5,6]。Sun 等[7]针对具有分布式执行器和传感器的大型挠性航天器,设计了分布式一致性观测器估计系统模态坐标,设计主从积分一致性振动控制器减小了柔性结构的振动。耿小明等[8]对振动主动控制中作动器位置优化问题进行了研究,基于可控性优化配置原则,利用遗传算法完成了圆柱壳体内作动器位置优化。周威亚等[9]基于一致性理论分布式振动控制方法,针对卫星太阳能帆板振动控制问题,通过数值算例验证了分布式控制方法的有效性。
然而,大型结构减振控制系统,激励形式及位置具有随机性。在假定需要控制的模态阶数下,当激励形式超出了模态截断阶次,存在着控制溢出的风险。且用H∞范数指标直接限定对外激励的减振衰减,相比可控、可观的作动器位置优化,更直观反应控制器的控制能力。基于此,本文假定在圆柱壳上以网格形式,成对布置压电传感器和作动器。基于数据驱动方法,在线对控制阶次进行模态截断。且通过H∞范数指标和粒子群优化算法,对作动器进行在线迭代优化选取,以实现分布式多智能体减振的自组织和自适应能力。
1 控制方程
1.1 动力学方程
图1 为具有坐标系的压电-圆柱壳耦合结构动力学模型,其中Ls为圆柱壳的长度,R为圆柱壳的半径,hs为圆柱壳的厚度。x为沿其长度方向的轴, θ为相对于垂直轴的周向角度,z为从壳中间曲面到壳上任意点的径向距离,u、v和w分别为x、 θ和z方向上的振动位移。矩形压电片以粘贴的形式安装在圆柱壳表面,x1i、x2i为第i个压电片在轴向坐标上的起点和终点位置, θ1i、 θ2i为第i个压电片在周向坐标上的起点和终点位置。
圆柱壳系统的动力学方程由Hamilton 原理导出:
式中:δT、δV、δW分别为圆柱壳系统动能、势能和外力功的变分。壳体和压电元件的总动能表示为:
式中,ρs、ρpi分别为圆柱壳密度和第i个压电元件的密度;Vs、Vpi分别为圆柱壳体积和第i个压电元件的体积,dVs=dVpi=Rdθdxdz;Np为压电元件的数量。线性压电材料本构方程表示为[10]:
式中:ε、Es、Ep分别为圆柱壳应变、圆柱壳弹性矩阵和压电弹性矩阵;H,δi,D分别为压电劲度常数、第i个压电元件的电荷密度矢量和介电常数。因施加电场仅在压电的厚度方向上起作用,所以电荷密度矢量可进一步表示为仅有厚度方向参数的电荷密度系数与电荷矢量乘积。
式中,Si为第i个压电元件的耦合面积。外力功可分为外扰做功和压电执行器做功,假设外扰仅在轴向方向上有作用:
其中:fd为外扰,Vai为第i个执行器上施加的电压,δqacti为第i个执行器上的电荷量变化,Na表示执行器数量。
假定圆柱壳的边界条件为简支-简支。圆柱壳模型3 个方向上位移可表示为[11]:
3 个方向上的位移用向量表达并写成线性组合的形式:
采用Sanders 壳体理论描述圆柱壳应变和位移之间的关系。导出基于Sanders 壳体理论应变方程并改写为矩阵形式[11],将式(13)代入得:
将式(14)代入到系统能量方程中,圆柱壳系统的总动能、总势能和外力功变化可进一步表示为:
其中,Fd为相容维数的扰动向量。将式(15)~式(17)代入到Hamilton 变分方程中,并合并同类项得:
qact和qsen分别为执行器电荷矢量和传感器电荷矢量,其矢量长度分别为执行器数量Na和传感器数量Ns,一般有Na=Ns且Np=Na+Ns。式(18)中各参数表示为:
得执行器和传感器电荷量为:
将式(27)代入式(26)中得到系统总动力学方程:
传感器经电荷放大增益G输出为:
1.2 动力学模型Ansys 验证
给定圆柱壳几何参数:长度Ls=0.51 m,半径R=0.15 m,厚度hs=0.002 m;材料参数:密度ρs=2 770 kg/m3,泊松比μs=0.3,杨氏模量Es=7.4×1010Pa;边界条件:简支-简支。使用Ansys 软件仿真计算,定义误差ε=(f1i-f2i)/f2i×100%,其中f1i为理论推导结果的第i阶固有频率,f2i为仿真结果的第i阶固有频率。具体结果如表1 所示。图2 为该圆柱壳仿真模型前6 阶模态振型图。

表1 圆柱壳结构固有频率对比Tab. 1 Comparison of natural frequencies of cylindrical shell structures

图2 圆柱壳结构前6 阶模态Fig. 2 The first six modes of cylindrical shell structure
由表1 可知,本文圆柱壳振动理论模型与仿真结果在前8 阶固有频率对比中,相对误差最大为1.05%,表明理论模型准确度较高。
1.3 状态空间
针对式(28)的系统总动力学方程,由于压电元件对圆柱壳结构的质量和刚度影响较小,假设忽略压电元件对结构质量、刚度的影响,简化可得:
引入式(31)的坐标变换,使坐标转换到正则模态坐标下,满足特征值和特征向量的正交性原则,使动力学方程解耦。
其中,式(34)、式(35)各参数矩阵表示为:
2 多智能体分布式H∞一致性减振控制器
2.1 H∞一致性减振控制器
多智能体分布式协同控制的一个基本问题是一致性,即设计一个仅基于本地信息交换的分布式控制协议,使所有控制代理以协调的方式实现一个共同目标[12-13]。
压电执行器传感器组成的多智能体通信拓扑可用G=(V,E,A)来表示。其中,V={1, 2, ···,N}为节点集合,E ⊂V×V表示边集合,表示邻接矩阵,其中aij为边(i,j)的权重,aij=0时,节点i、j之间不存在通信,且当i=1,2,...,N时,aii=0。对于无向图,有,且aij=aji。Laplacian矩阵与邻接矩阵 A相关,定义。
考虑一般线性多智能体系统中N个相同的智能体:
式中,xi∈Rn为第i个智能体状态,ui∈Rp为控制输入, ωi为外扰输入,可包括外部激励,设备干扰,测量噪声等;A、B、D分别为具有相容维数的状态矩阵,控制矩阵和干扰输入矩阵。设计分布式控制协议如下式:
其中,K∈Rp×n为反馈增益矩阵,c>0为耦合强度。设计控制器的本质是设计控制协议中的反馈增益矩阵K,使多智能体在受到外部干扰和不确定的初始状态时,具有良好的瞬态响应和鲁棒性,并达到一致性。定义以下一致性输出度量[14-16]。
其中,C为输出增益矩阵。上式写成闭环系统矩阵形式:
用Tωz描述系统(38)从扰动 ω到输出z的传递函数矩阵,给出以下H∞性能指标定义。
定义1[15,17]综合考虑衰减外部干扰和初始状态干扰意义上的最优控制率,定义权重矩阵R=RT>0,引入综合瞬时性能的H∞一致性指标定义:
定义2[15]对于给定值γ>0,多智能体系统(38)若满足以下条件,则分布式一致性协议(36)解决了综合瞬时性能的H∞一致性问题:
1) 当ωi=0, 即时,多智能体系统可达成一致性。
2)当ωi≠0时,。
定义 2.3[14,15]对于给定的γ>0,当且仅当存在满足以下线性矩阵不等式(LMIs)的对称矩阵控制P>0,标量τ>0时,存在H∞一致性指标的控制器:
当P>0,τ>0,γ>0,根据LMIs 最小化 γ,得到带有一致性增益的控制器(36)系统(38)的H∞性能极限γtmin。求解LMIs 得到的γtmin通常伴随着高增益K,通过以下算法流程进一步优化控制器:
1)对于给定的γ ≥γtmin,当P>0,τ>0时,根据LMIs 最小化 τ;
2.2 参数优化
在有限执行器、传感器的前提下,针对某一扰动情况,在全定义域内进行控制位置寻优,假定选择N对压电执行器、传感器,则需对压电位置参数[(x11,θ11),(x12,θ12),...,(x1N,θ1N)]进行优化选择。本文采用离散粒子群算法(BPSO)对划分区块并编号的圆柱壳域进行控制块优化选择。流程如下:
步骤1初始化算法参数,生成粒子初始位置参数。
步骤2导出各粒子对应的状态空间。
步骤3求解该组粒子位置参数下的LMIs,导出γtmin,并给定值γ ≥γtmin。
步骤4在该定值 γ下,重新求解LMIs,最小化标量τ>0,记录该粒子群的最小 τ,并保存产生该 τ的位置参数。
步骤5依据上一代粒子的历史最优位置和历史最优目标函数值,更新粒子群速度与位置参数。
步骤6若新粒子群代数G未超过迭代上限Gen,则返回步骤2;否则输出最优位置参数,并导出控制器。
2.3 分布式减振控制流程
本文圆柱壳结构干扰自适应分布式减振控制方法流程,如图3 所示。
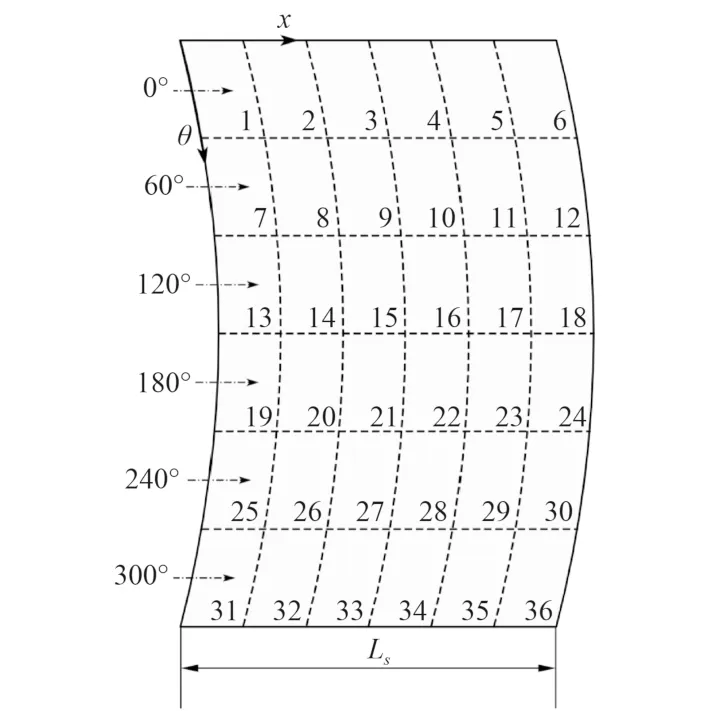
图3 圆柱壳展开模型Fig. 3 Cylindrical shell expansion model
步骤1进行圆柱壳控制区块划分,区块作为压电元件的预选择位置,分别对位安装压电执行器和压电传感器。
步骤2不同激励位置和形式,系统振动响应不同,采用傅里叶变换(FFT) 进行振动能量时频分析,一般取振动能量占系统振动总能量90%以上的前n阶模态作为系统控制阶数。
步骤3根据步骤2 中给定的控制阶数进行H∞一致性性能指标优化,利用BPSO 算法进行控制位置参数迭代优化,导出该激励参数下,全局最优控制位置和控制器参数。
步骤4导出该激励参数下的控制器,进行振动控制仿真。
步骤5当激励参数改变时,重新进行步骤2~步骤4 的优化和振动控制仿真过程。
3 仿真实验与分析
将圆柱壳结构划分为6×6 的控制区块,图3 为圆柱壳展开模型。
圆柱壳和压电元件的各仿真参数如表2 所示,其中压电执行器和压电传感器结构参数相同。为验证控制器在结构受激励形式、激励位置变化时,减振控制的自适应性,第一组和第二两组仿真实验分别设置同一位置参数的3 个脉冲激励和同相位持续激励。第三组仿真实验设置4 个点激励,其形式分别为结构前四阶模态频率同相位正弦函数。

表2 圆柱壳结构和压电元件参数Tab. 2 Cylindrical shell structure and piezoelectric element parameters
仿真实验1 中,设置结构所受激励位置分别为(Ls/2,π/6),(Ls/2,5π/6),(Ls/2,3π/2), 其形式为t=0 时刻同幅值脉冲。位置迭代初始化参数为:最大迭代数Gen=200,粒子数目NP=20,粒子维度Den=36,学习因子c1=1.8,c2=1.8,惯性权重w=1~0.1,vmin=-1.2,vmax=1.2。
针对图3 所示的控制区块模型,进行圆柱壳结构振动控制自组织优化。同时为避免结构振动节线位置,取第15 区块作为系统振动能量对比位置以及减振控制效果对比位置。
该激励参数下,圆柱壳结构第15 区块的振动能量分布如图4 所示。圆柱壳结构第四阶固有频率振动能量最高,且结构振动能量主要分布在前四阶模态,故选择压电对元件数量为4 组。Laplacian 矩阵 Ls的元素lij=3(i=j),lij=-1(i≠j),i,j=1,...,4。图5 为基于位置迭代优化得到压电控制区块(15,20,32,36),导出该激励下的最优一致性控制器(36)进行振动控制仿真,各区块压电传感器经放大后电压输出如图6 所示。
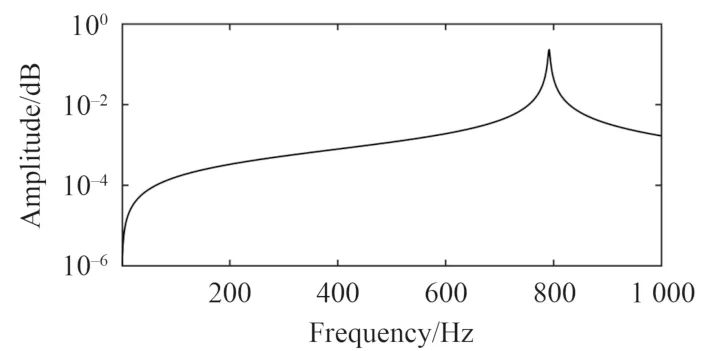
图4 实验1 圆柱壳振动能量分布Fig. 4 Cylindrical shell vibration energy distribution of experiment 1

图5 实验1 位置优化的壳模型示意图Fig. 5 Schematic diagram of shell model with optimized position in experiment 1

图6 实验1 传感器电压输出Fig. 6 Sensor voltage output of experiment 1
可知,区块20 传感器位于第四阶模态振型的节线处。结合图7 可知,对于系统结构的第四阶模态振动控制器有较好抑制效果,圆柱壳结构的振动能量降低了91.5%。仿真实验1 中一致性输出度量Z如图8 所示,通过设计的一致性项,各输出度量能在0.1 s 内达到同一输出频率且收敛。

图7 实验1 圆柱壳结构振动能量对比Fig. 7 Comparison of cylindrical shell vibration energy distribution of experiment 1

图8 实验1 一致性输出项ZFig. 8 Consistency output item Z of experiment 1
仿真实验2 中,外激励形式为圆柱壳结构第四阶固有频率的同相位正弦函数,作用位置及其他条件与实验1 相同。圆柱壳结构受该激励影响振动能量分布如图9 所示。

图9 实验2 圆柱壳振动能量分布Fig. 9 Cylindrical shell vibration energy distribution of experiment 2
图10 中峰值频率为结构第四阶固有频率,即结构做第四阶固有频率下的共振,选择控制前4 阶模态振动。由于仅改变了外激励形式,故仅影响H∞一致性性能指标上界,即当ωi≠0时,。执行器传感器数量选择和位置优化结果同仿真实验1。各压电传感器电压输出如图10 所示。

图10 实验2 传感器电压输出Fig. 10 Sensor voltage output of experiment 2
由图11 和图12 可知,在实验2 激励载荷下,圆柱壳振动形式为第四阶固有频率的共振,控制器能在0.1 s内使振动收敛到较低幅值,圆柱壳结构的振动能量相较于未控制时降低90.9%。其中,区块20 位于第四阶模态振型的节线处。

图11 实验2 圆柱壳结构振动能量分布对比Fig. 11 Comparison of cylindrical shell vibration energy distribution of experiment 2

图12 实验3 圆柱壳振动能量分布Fig. 12 Cylindrical shell vibration energy distribution of experiment 3
仿真实验3 中,设置圆柱壳结构所受外激励的位置为(2Ls/5,π/8),(3Ls/5,5π/8),(2Ls/5,9π/8),(3Ls/5,3π/2),其形式分别为圆柱壳结构前四阶固有频率的同相位、同幅值正弦函数,其他条件均与实验1 相同。
该激励参数下,圆柱壳结构第15 区块的振动能量分布如图12 所示,圆柱壳结构受到前4 阶模态频率的正弦函数激励,其振动形式主要为前4 阶共振的叠加,且结构振动能量主要分布在前4 阶模态,选择压电对的元件数量为4 组。Laplacian 矩阵 Ls的元素lij=3(i=j),lij=-1(i≠j),i,j=1,...,4。
压电控制区块为(6,20,23,25),如图13 所示。导出该激励下的最优一致性控制器(36)并进行振动控制仿真,各区块压电传感器电压输出如图14 所示。

图13 实验3 位置优化的壳模型示意图Fig. 13 Schematic diagram of shell model with optimized position in experiment 3
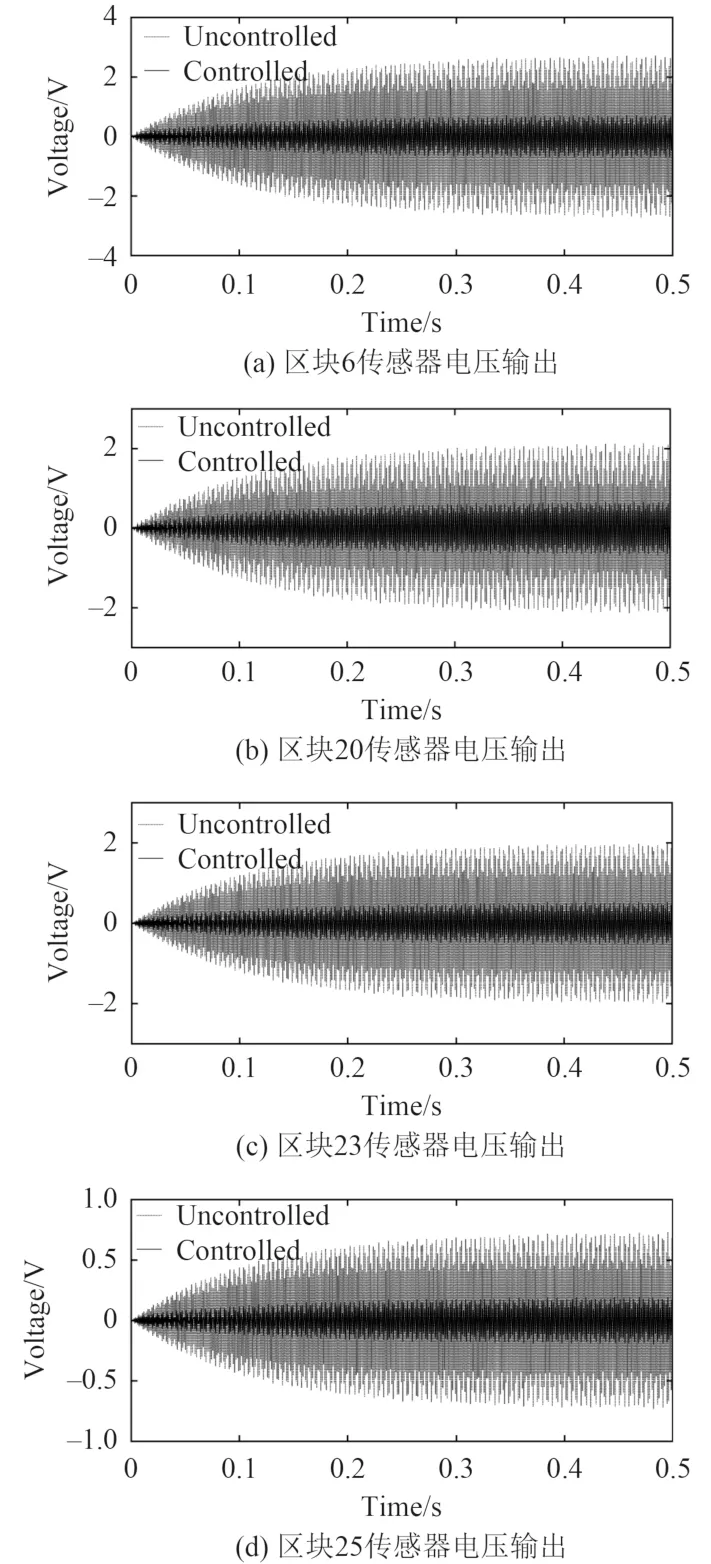
图14 实验3 传感器电压输出Fig. 14 Sensor voltage output of experiment 3
由图14 可知,圆柱壳结构受到复杂激励时,经自组织的控制器能在0.1 s 内,使结构振动收敛到稳定区域。结合图15 可知该激励形式下,对于系统结构第二、四阶模态振动控制器有较好抑制效果,圆柱壳结构振动能量相较于未控制时降低了91.2%。
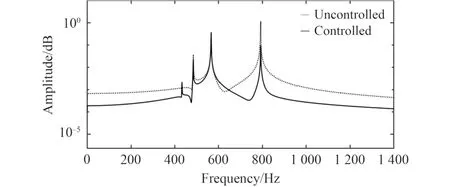
图15 实验3 圆柱壳结构振动能量分布对比Fig. 15 Comparison of cylindrical shell vibration energy distribution of experiment 3
4 结 语
1)基于Sanders 壳理论和Hamilton 变分法建立圆柱壳和压电元件耦合动力学模型,验证了该模型的准确性。
2)根据外激励位置和形式变化的特点,设计了压电多智能体分布式H∞一致性减振控制器干扰自适应优化策略。
3)本控制策略下,圆柱壳结构受3 个初始脉冲激励时,能较快使振动收敛到0,且振动能量相较于未控制时降低91.5%;持续激励时,振动能量降低了90.9%;多模态激励时,振动能量降低91.2%。
综上,圆柱壳受到脉冲激励、持续激励、多模态持续激励时,经优化的控制器能有效抑制结构振动,使分布式控制器对外激励有较好的自适应能力。
