载荷方向不确定条件下结构动态稳健性拓扑优化设计1)
2023-12-16杜鼎新
杜鼎新 王 栋
(西北工业大学航空学院,西安 710072)
引言
传统的结构拓扑优化设计往往是在理想状态下进行的,即结构所受的载荷环境、材料参数以及约束条件等均被认为是确定性的.如此所获得的结构优化设计,也仅仅是针对某个(些)确定的名义设计状态而言是最优的[1-7].然而在实际工程结构中,不确定性因素却是普遍存在且无法避免的,如材料的物理性能、模型几何尺寸、边界约束条件和外界施加的载荷等[8-13].这些结构设计参数会由于工业生产的误差、工作环境的改变以及长时间服役引起性能的退化等因素而产生变化,导致结构的实际工作状态不再是理想和固定的,而是可变和不确定的.即使这些参数的变化范围很小,无疑也会对结构的承力性能产生巨大的作用,最终可能对结构的响应造成不利的影响.这就意味着,如果在结构设计时仅考虑理想的确定性情形,那么所得到的系统就缺少必要的结构备份或冗余,在实际应用中缺乏足够抵抗材料参数或载荷等不确定性因素变化的能力,其结构功能甚至可能因为这些因素的变化而提前失效[13].因此,为了使所设计的结构具有较强的抵抗不确定性因素的能力,设计者需要在其初步设计阶段就主动地考虑它们的影响,而非仅关注少数几个离散的理想设计状态,从而使结构具有足够的安全冗余,容忍工作状态的可变性,且在实际应用中能正常、稳定地发挥预期的功能和效果[11-16].
相较于结构的材料属性、边界约束条件等因素,外载荷状态对结构拓扑构型设计的影响更大.实际工程中,由于外部环境的变化,作用于结构上外载荷的大小、方向与位置等都可能具有一定范围内的随机可变性[11,16-19].因此研究载荷不确定性对结构拓扑优化设计的影响具有非常现实的工程意义.另外,大多数工程结构,如航空航天器、船舶、桥梁等,其结构在服役期内会受到各种时变载荷的作用,而一个复杂的时变周期激励通常能近似分解为几个简谐激励的叠加.因此简谐激励是一种非常基础且典型的动载荷[6],研究简谐激励作用下结构的拓扑优化设计具有十分重要的理论和实际意义[17-18].
研究外载荷不确定性条件下结构拓扑优化设计可采用基于可靠性的拓扑优化方法(reliability-based topology optimization,RBTO)[20-24],或基于稳健性的拓扑优化方法(robust topology optimization,RTO)[9,11,16-19,24-30].两者均可使用概率或者非概率模型表示不确定变量的变化情况.不同之处在于前者旨在满足可靠性约束条件,而后者聚焦于减少结构性能对不确定性变量的敏感性.在稳健性拓扑优化的体系下,已经有许多关于外载荷作用方向的不确定性的研究报告[11,16-17,25-28,30].通常,结构的动柔顺度响应和外激励作用方向的变化之间并没有一个显性的关系式[16,28],因此难以直接分析出外激励方向扰动对结构动柔顺度的影响.本文旨在构建一种简单且高效的计算方法,可直观、快速地获得结构动柔顺度的概率特征指标.并基于这些特征指标,开展了考虑外载荷作用方向不确定性的稳健性结构动态拓扑优化设计.
在实际工程中,外载荷作用状态的小幅变化往往近似地符合正态的概率分布,即围绕着预先设定的名义状态有着一定概率性的变化规律,因此可使用正态随机分布对外载荷作用状态的可变性进行描述[11,25-26].而且相应的结构动柔顺度也不再是一个确定的值,但两者之间也并非简单的线性关系.为了高效地计算在外载荷作用方向变化情形下结构的动柔顺度响应,本文首先将外载荷沿坐标轴进行投影,然后对结构的动柔顺度响应进行二阶泰勒展开,以便获得动柔顺度的近似表达式.并近一步推导出结构动柔顺度的期望和方差的计算表达式,以及它们对拓扑变量灵敏度的显性计算公式.按照确定性的优化策略,可完成结构在动载荷作用下的稳健性拓扑设计.保证在外激励作用方向出现扰动时,结构的动柔顺度响应不发生较大的改变.用结构动柔顺度的变异系数(coefficient of variation,COV)[13]作为一种量化的稳健度衡量指标,对比分析了不同设计策略结构拓扑优化设计的稳健程度.
本文采用概率模型描述外载荷作用方向的不确定性,基于材料属性的有理近似方法 (rational approximation of material properties,RAMP)建立了连续体结构动态拓扑优化模型.以结构动柔顺度的期望值及标准差(standard deviation,STD)的加权和最小化为设计目标函数[11,16,25-27],以整体材料用量为约束条件,采用基于灵敏度分析的移动渐近方法(method of moving asymptotes,MMA)[31],研究简谐激励在作用方向不确定性条件下结构受迫振动稳态响应的拓扑优化问题.最后用两个典型算例来证明本文所提方法的有效性,并与传统的优化结果进行对比,以便验证稳健性拓扑优化设计结果的可靠性.
1 结构稳健性拓扑优化模型
1.1 线性振动系统稳态响应分析
当外激励频率远离结构的固有频率时,可以暂时忽略结构内的阻尼.采用有限元法对连续体结构进行离散化处理,则无阻尼结构受迫振动微分方程可表示为[17]
式中,K和M分别是振动系统N×N阶的刚度和质量矩阵,N表示结构的自由度数;u(t)和分别是结构的位移和加速度响应N维列阵;f(t)是系统所受外激励列阵.假设结构受到简谐外力的作用
其中,ω是外激励频率((°)/s),是一个给定的值;F(θ)是沿坐标轴方向上的外激励幅值N维列阵
其中,奇(偶)数项表示在有限元结点处,外激励沿x(y)轴的幅值分量;θ表示外激励的作用方向,是一个随机变量.假设其变化符合正态分布,即见图1 所示.其中μθ代表外载荷作用的期望或名义方向,σθ是其标准差,代表着外载荷方向变化的概率统计偏差.严格地说,一个服从正态分布的随机变量是无界的.然而按照工程实践中广泛使用的“3σ”法则,即对于特定的符合正态分布的随机变量而言,它取值落在区间[μ-3σ,μ+3σ]之外的概率小于千分之三,因此便可以认为区间[μ-3σ,μ+3σ]为该随机变量实际可能的取值区间.依据该法则,σθ的值可以通过区间宽度基本确定.由于载荷作用方向θ具有可变性,因此外激励幅值列阵F(θ)也具有一定的不确定性.
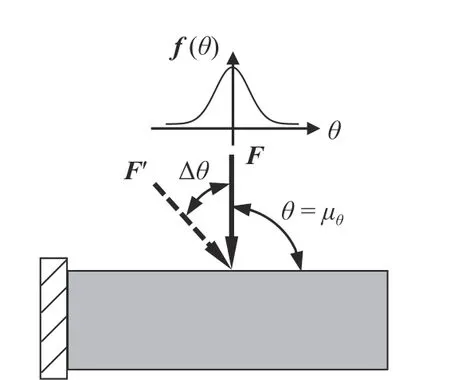
图1 结构受具有方向不确定外载荷作用的示意图Fig.1 Schematic of a load with the direction uncertainty imposed to a structure
对方程式(1)两边同时进行Fourier 变换,则可得振动系统响应的特征平衡方程
式中,D(ω)=K-ω2M是振动系统的动刚度矩阵.U(ω)是结构位移响应幅值列阵,在不考虑结构阻尼的前提下是实数,且与结构的动态性能以及激振频率密切相关.本文采用直接方法精确计算结构在简谐激励作用下的稳态响应,不必考虑模态截尾带来的计算误差和虚假模态的干扰.求解方程(4)可得结构响应的幅值列阵U(ω),进而由Fourier 逆变换可得时域内结构的稳态动响应u(t).
1.2 结构拓扑优化数学模型
实际工程中,由于结构所处环境的变化,外载荷作用方向具有一定的可变性.因此结构的响应也具有一定的不确定性.本文以结构有限元模型中单元的相对密度ρe作为设计变量,在给定的区域内构造结构的最优拓扑构型(材料布局).考虑到动柔顺度的不确定性,将设计目标函数设置为最小化结构动柔顺度均值和标准差的加权和[11,16,25-27],则结构动态稳健性拓扑优化问题数学列式可表示为
式中,Cd(θ)是结构的动柔顺度,它不仅与外激励的大小有关,还与激励作用方向θ密切相关,即随着θ的变化而改变.因此,Cd(θ) 也是一个随机变量.J为优化设计的目标函数,是结构动柔顺度的期望,是结构动柔顺度的标准差,β是权重因子,其作用是调节结构动柔顺度标准差在目标函数中的占比.ρ是n维拓扑变量列阵,n代表结构的单元总数.ρmin是为了避免结构刚度矩阵奇异而设置的一个下限值(ρmin=0.001).ve是单元的体积,fv是给定的材料体分比,即材料用量的上限.
以上模型与传统的确定性拓扑优化模型最大区别在于:结构的动柔顺度Cd不再是一个确切的量,而是随机变量θ的函数.且优化的目标函数不再仅仅针对名义设计状态,而是综合考量在θ的随机变化区间内的整体设计状态,旨在让最终的优化设计结果具有能容忍外激励方向变化的冗余性.这使得优化设计过程更加复杂,但也更加真实地反映了工程结构的实际受载情况.
为了合理地描述结构的动力学性能,根据以往的研究结果,本文采用RAMP 模型对单元质量和刚度矩阵进行插值,以避免虚假局部模态的产生[17]
式中,q是插值模型的惩罚因子(q=5);m0和k0分别是实体材料单元的质量和刚度矩阵.
1.3 结构动柔顺度一阶导数灵敏度的计算
当外激励作用方向θ按照正态分布随机扰动时,根据文献[16,28]的定义,只需在外激励的名义(理想)作用方向,即
时,对振动系统进行分析,计算结构的动态响应.并在单元层面上计算结构的动柔顺度Cd0
于是,其对单元的相对密度ρe的一阶导数灵敏度可由下式计算得到
其中,ue是单元的动响应幅值列阵;de=ke-ω2me是单元的动刚度矩阵.由RAMP 模型的材料插值函数式(8)可得
于是,通过有限元分析计算,即可获得振动结构的名义动柔顺度Cd0及其对拓扑设计变量的一阶导数灵敏度值.但当外激励的作用方向θ发生扰动时,如果依然通过传统有限元方法进行分析和计算,就需要再次求解特征平衡方程式(4).这样的计算途径工作效率很低,尤其考虑到外激励的作用方向可以连续地随机变化.因此需要一种能高效获取在外激励方向发生变化时结构动柔顺度的计算途径.
2 外激励方向不确定性的影响规律
2.1 载荷方向扰动对结构动柔顺度的影响
假设外激励的大小和位置保持不变,当载荷作用方向发生改变时,其传递路径亦将发生改变.即外激励作用方向的变化必然引起结构动柔顺度的变化.利用二阶泰勒级数展开公式,得到动柔顺度Cd(θ)变化的显性表达式,可避免振动系统动响应方程的重复求解.
在载荷位置固定的前提下,以载荷名义作用方向为中心的一个较小的区域内,可得载荷方向发生改变后,结构动柔顺度Cd的近似表达式[16,28]
按照式(3)对外激励幅值F(θ)的表达形式,首先推导其对θ的一阶和二阶导数
将结构的名义动柔顺度改写成
则动柔顺度对载荷作用方向的一阶导数可表示为
据此,可进一步计算结构的动柔顺度Cd0对载荷作用方向的二阶导数
根据以上推导结果,将式(10)、式(18) 和式(19)代入式(13),即可利用该表达式快速计算由于外激励作用方向的扰动而引起结构的动柔顺度值.
2.2 目标函数及其灵敏度的计算
虽然前文已经假设外激励作用方向的变化符合随机正态分布,但结构的动柔顺度响应变化一般不符合正态随机分布.按照优化设计目标的要求,需要高效地计算结构动柔顺度响应的均值和方差.对式(13)两边同时分别求期望和方差可得[16]
根据θ的正态随机分布规律,式(21)中的各协方差项均等于0[32].因此,结构动柔顺度响应的均值和标准差表达式如下
于是,结构动柔顺度响应的变异系数为
岩样采用薄壁金刚石钻头沿垂直于岩层方向钻取岩芯,经过锯、磨加工成直径为50 mm,高为100 mm,试样两端面不平行度不大于0.05 mm,满足《规程》要求,60组共计180个试样,制备部分试样,如图2所示,其中顶板岩石用A编号,底板岩石用B编号。试验在RMT-150B型电液伺服岩石力学试验系统进行单轴压缩试验,如图3所示。轴向荷载采用1 000 kN力传感器测量,轴向压缩变形采用5.0 mm位移传感器测量,变形精度为1.0×10-3 mm,采用位移控制方式,加载速率为0.002 mm/s,每组岩性重复进行3次试验。煤层顶底板岩石单轴压缩试验结果见表1。
显然,式(22)和式(23)建立了结构动柔顺度响应Cd(θ)的概率特征值显式表达式.无需再通过其他额外的途径,如Monte Carlo 模拟(Monte Carlo simulation,MCS)法等[11,25,30],即可获得结构动柔顺度响应的一、二阶矩以及优化设计的目标函数
这使得稳健性结构动态优化设计效率大为提高.
将式(25)对拓扑设计变量求导,可得
其中,式(26)右边第一项由式(11)得到,其余各项可由式(11)分别对外载荷作用方向θ连续微分得到
式中,单元位移列阵对θ的一阶、二阶导数可利用式(16)计算得到.另外,式(27)和式(28)同样也可以分别利用式(18)和式(19)在单元层面上对ρe求一阶导数获得.根据以上推导结果,即可利用式(26)直接计算目标函数对所有设计变量的一阶灵敏度.在此基础上,使用基于灵敏度的MMA 算法对设计变量进行迭代更新,实现结构拓扑构型的演化.此外,还要引入灵敏度过滤技术,对动柔顺度灵敏度进行处理,以便消除优化过程中的棋盘格现象,确保优化结果的可行性和可靠性[16-19].
3 算例分析
下面我们用两个算例来验证本文所提稳健性拓扑优化算法的可行性,并与确定性拓扑优化(deterministic topology optimization,DTO)设计结果进行对比分析,观测结构稳健性构型设计的变化情况,同时探寻结构是如何通过增加额外构件而有效提高其抵抗外载荷方向扰动能力的,进而证明所得结果的合理性.假设材料的弹性模量E=200 GPa,密度ρ=7800 kg/m3,泊松比ν=0.3.有限元分析采用四结点平面应力单元,薄板厚度为10 mm.优化过程中取过滤半径为单元尺寸的1.5 倍,收敛条件设置为相邻两次迭代各设计变量的最大改变量小于0.01[31].材料体积约束系数fv=0.35,初始设计时,将所给的材料均匀分布在整个设计区域内.
3.1 简支平板结构
简支平板结构设计区域尺寸及边界约束如图2所示.理论上,结构在底边中点承受一个集中简谐激振力f(t)=10ejωtkN 的作用,频率为150 Hz (ω=2π×150 (°)/s).但是由于加载环境的复杂性,外激振实际作用方向将围绕着作用点产生一定的扰动.将设计区域均匀划分成120×40 的有限元网格.初始设计,结构的第一阶固有频率为265.63 Hz.假设外激励作用方向θ的标准差为 σθ=π/12.目标函数中的权重因子β=2.
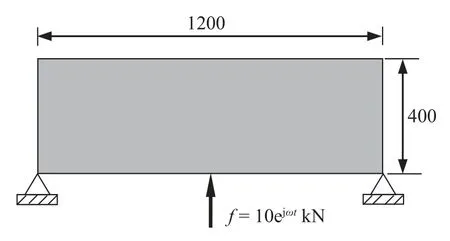
图2 简支平面矩形板结构Fig.2 A simply supported rectangular panel
在开展结构拓扑优化设计前,先对本文所提有关结构动柔顺度均值和方差估计公式的准确性进行验证.分别利用MCS (样本数=105)以及式(22)和式(23)进行计算,数值结果如表1 所示.可以看出,两种方法的结果非常接近,尤其是均值的计算结果,这足以验证了式(22)和式(23)的有效性和准确性.此外,用本文提出的方法计算结构动柔顺度均值和方差可以大幅降低计算机运算所需的时间,显著提高优化设计的效率.
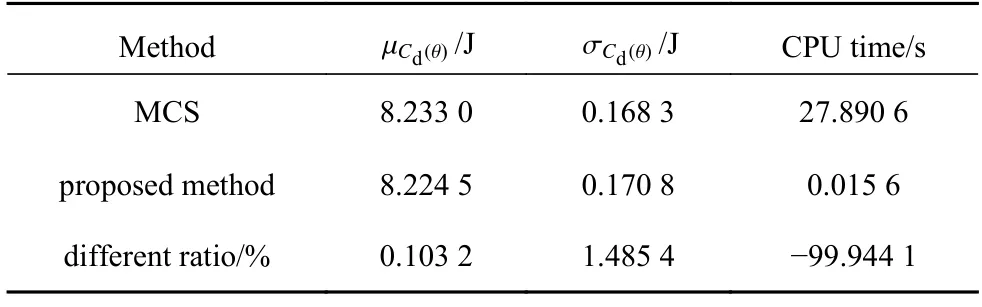
表1 两种方法所得结构动柔顺度概率特征指标对比Table 1 Comparison of the obtained stochastic measurements of the structural dynamic compliance
首先开展结构的确定性拓扑优化设计,其最优构型如图3(a)所示.可见,垂直方向的外载荷先通过中间的两根斜杆(或构件)传递到上缘,然后再通过外侧的构件传递到支撑点(基础).由于载荷作用方向是固定的,没有水平方向的分力,因此结构设计区域的下缘没有水平杆件将载荷作用点与支撑点直接连接在一起.
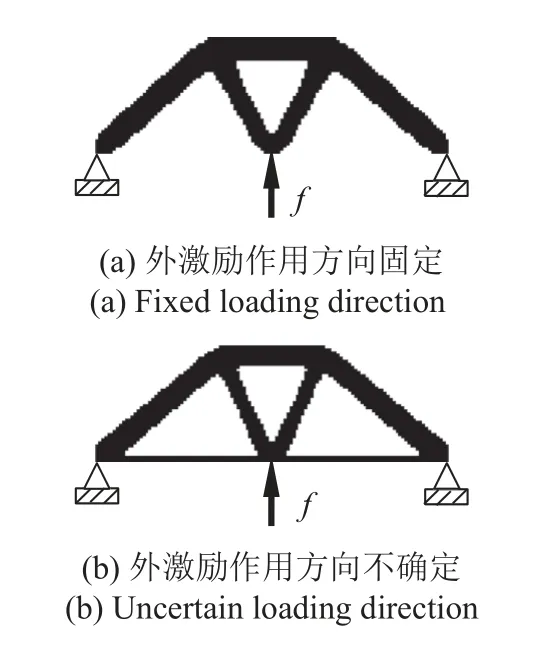
图3 确定性和稳健性设计策略结构拓扑构型对比Fig.3 Comparison of the topology optimizations on two different design strategies of DTO and RTO
随后,开展结构稳健性拓扑优化设计,所得最优构型设计如图3(b)所示.两种优化策略得到的结构构型看似基本相同,但是稳健性优化设计在结构的下缘增加了一根水平构件,从而形成了额外的两条传力路径.当载荷作用方向发生扰动,不再是仅沿垂向激励时,外激励的水平分量将通过下缘杆件直接传递到支撑点.由此可知,增加的水平杆件可有效抵抗外激励方向的扰动,能显著提高结构在载荷作用方向不确定性情形下响应的稳健性.
表2 比较了两种设计策略所得结构拓扑优化数值结果.虽然在确定性拓扑优化时没有考虑外激励作用方法的可变性,但仍可用第2 节中的方法计算其随激励方向随机扰动时结构动柔顺度的概率特征值.从表2 中的数值对比可知,按照稳健性拓扑优化策略所得结构动柔顺度的期望、标准差以及变异系数,比确定性拓扑优化相应结果均有明显降低,尤其是标准差以及变异系数下降幅度均超过了95%.众所周知,这两个特征指标能衡量不确定性数值的集中程度[32],其值越低,表明因外激励方向变化所引起的结构动柔顺度响应的变化幅度越小.即结构对外激励作用方向扰动不再敏感,结构的稳健度更高,材料布局设计更加合理、可靠.

表2 两种设计策略结构拓扑优化结果对比Table 2 Comparison of the numerical results with the two optimization strategies
图4 示出了结构的动柔顺度随外激励作用方向的变化情况.值得注意的是,当外载荷作用方向受到扰动以后,确定性设计结构的动柔顺度将快速增加,即结构的动刚度明显降低.这表明了该结构抵抗外激励方向扰动的能力较差.相比之下,稳健性优化设计结构的动柔顺度在激励方向扰动状态下能基本保持一致,且变化趋势随角度的增大而逐渐减小,这表明了稳健性拓扑优化设计能避免结构的动柔顺度(刚度)发生剧烈变化,有效保持结构动态性能的稳定性.
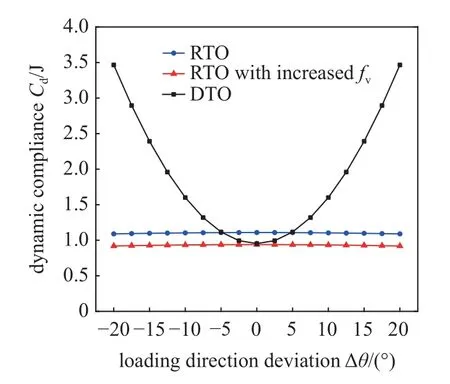
图4 结构动柔顺度随外激励作用方向变化情况Fig.4 Variation of the structural dynamic compliance caused by the external loading direction disturbances
然而,由图4 还可以发现,稳健性拓扑优化设计的名义最小动柔顺度Cd0比确定性相应值稍大一些(15.30%),见表2 所示.进一步比较图3 可知,稳健性拓扑优化设计中间两根斜撑杆的截面积,较确定性的优化设计要细一些,从而导致其名义最小动柔顺度有所增大.这是因为为了提高结构抵抗外激励方向的扰动能力,有一部分材料用来构建额外的水平承力构件,以便增加结构对外载荷传递的可靠性.因此在相同材料体分比条件下,稳健性拓扑优化设计结构的名义动刚度会有一定的损失.但是这部分损失可以通过适当地增加结构材料得到有效补偿[4].
实际上,对于确定性拓扑优化而言,其优化设计目标仅仅是名义加载状态下结构的动柔顺度最小化,而忽略其变化情况,因此该优化策略对应的名义动柔顺度值一般会更小.而稳健性拓扑优化要同时考虑在激励方向随机变化情形下,结构的动柔顺度值及其变化和分散情况.因此稳健性设计所得动柔顺度变化曲线比确定性设计对应的曲线变化更加平缓,在载荷扰动状态下的结构动柔顺度数值更加稳定.由于受材料体积的制约,稳健性设计的名义动柔顺度值难免会有所上升,而优化设计过程就是要在相互妥协中找到矛盾双方最佳的解决方案[9].
在本例中,只要将结构材料体分比增大到fv=0.358(2.29%),就可以将稳健性拓扑优化设计的名义最小动柔顺度降到与确定性优化设计相同的结果,并且结构的动柔顺度变化情况基本保持不变,见图4 所示.即在少许增大结构材料用量的基础上,结构的动柔顺度响应将全面优(小)于确定性优化设计的结果.这再次表明采用本文提出的稳健性拓扑优化设计后,结构抵抗外载荷作用方向扰动的能力有了显著地增强.
比较结构的前3 阶固有频率可以发现,结构的低阶固有频率,经过拓扑优化后都得到了明显提高,如表3 所示.在当前激励情形下,结构的总体动刚度较初始设计有了显著增大,从而使结构的动响应幅值急剧减小.此外,在相同材料体分比约束条件下,稳健性拓扑优化设计的结构固有频率要略小于确定性优化的结果,这也是为了能够有效提高结构响应的稳健性,传力路径模式更新的结果.
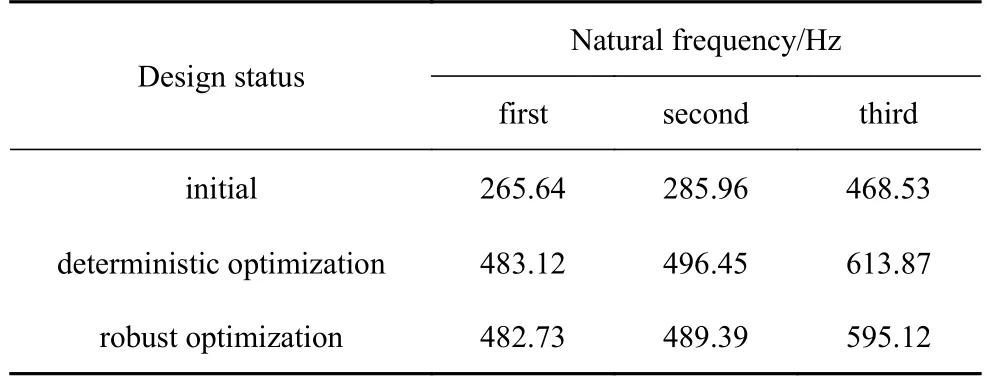
表3 简支平板结构前3 阶固有频率比较Table 3 Comparison of the first three natural frequencies of the rectangular panel structure
此外,还有一点值得注意的是,随着优化过程的持续运行,结构的固有频率也会不断提升,这就使得优化后结构的第一阶固有频率和外激励的频率有了较大差距,从而使得动力学优化设计问题越来越接近于静力学优化设计问题.为了验证该方法在高频外激励作用下的可行性,针对同一设计域,在外激振频率为300 Hz,材料体积约束系数fv=0.55 (初始设计时,结构的第一阶固有频率为262.72 Hz)的条件下,再次对结构开展拓扑优化设计,结果分别如图5 所示.可以看到,在高频外激励作用下,两种不同优化策略所得结构之间的差异与低频外激励作用下的结果类似,稳健性优化设计仍然形成了额外两条传力路径,可将外激励的水平分量通过下缘杆件直接传递至支撑点.除此之外,稳健性设计的拱形传力路径中出现了空隙,这也是材料重新分布,额外传力路径消耗材料的结果.
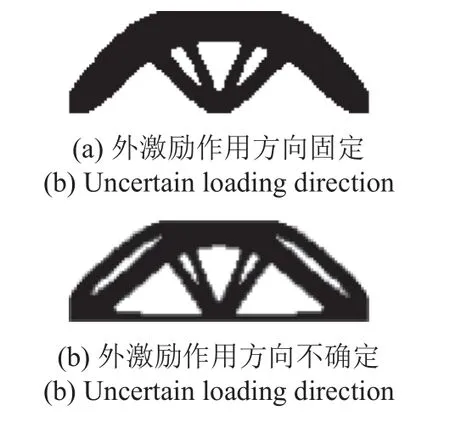
图5 两种设计策略结构拓扑优化在高频外激励条件下结果对比Fig.5 Comparison of the topology optimizations on two different design strategies under an external load of a higher frequency
表4 列出了在高频外激励作用下两种拓扑优化设计所得数值结果.可以看出,稳健性优化设计仍以略微增大结构名义动柔顺度的代价,大幅降低了结构动柔顺度的期望、标准差以及变异系数,使得结构对高频外激励方向的变化不再敏感.
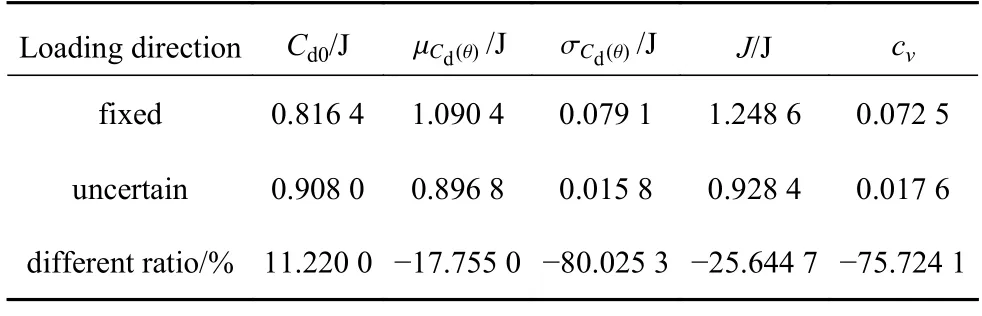
表4 两种设计策略结构拓扑在高频外激励条件下优化结果对比Table 4 Comparison of the optimized results under an external load of a higher frequency
3.2 MBB 梁结构
图6 所示为MBB 梁结构设计区域及尺寸,左、右两端固定.理想状况下,一个集中简谐力f(t)=10ejωtkN 施加在梁上边缘的中点处,外激振频率是200 Hz.但实际上外激振实际作用方向会绕着理想方向产生一定的扰动.将结构设计区域均匀划分成150×25 的有限元网格.假设外激励作用方向θ的标准差为 σθ=π/54.
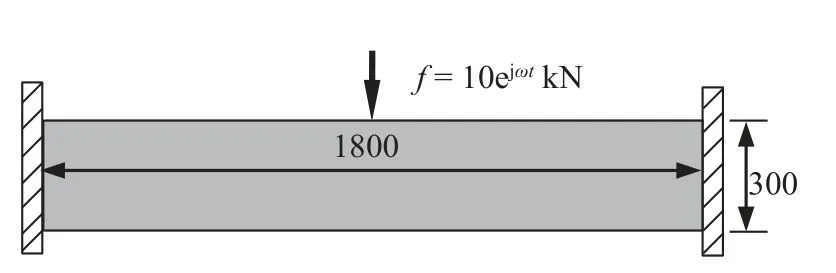
图6 MBB 梁设计区域及外激励Fig.6 Design domain of the MBB beam and the external force
图7 分别示出了结构确定性和稳健性拓扑优化得到的构型设计.可以看到,两种设计策略得到的结构拓扑优化结果仍存在着较大的差异.确定性拓扑优化设计中间两根斜杆张成90°的夹角.表明外激励先沿着相互正交的两个方向传递到下弦,然后再传递到固定基础上[9].而稳健性优化设计在外激励作用点两侧又构建了额外的两根斜杆,产生两条辅助的传力路径.且内侧两根斜杆和下弦杆的截面尺寸均有明显减小,以满足对材料体积的约束.由于外激励的作用方向具有不确定性,施加在结构上的外激励会存在一定的水平分量,而增加的外侧斜杆件能有效地将这一部分载荷传递至约束边界,以抵抗外激励方向的扰动,提高结构性能的稳健性.
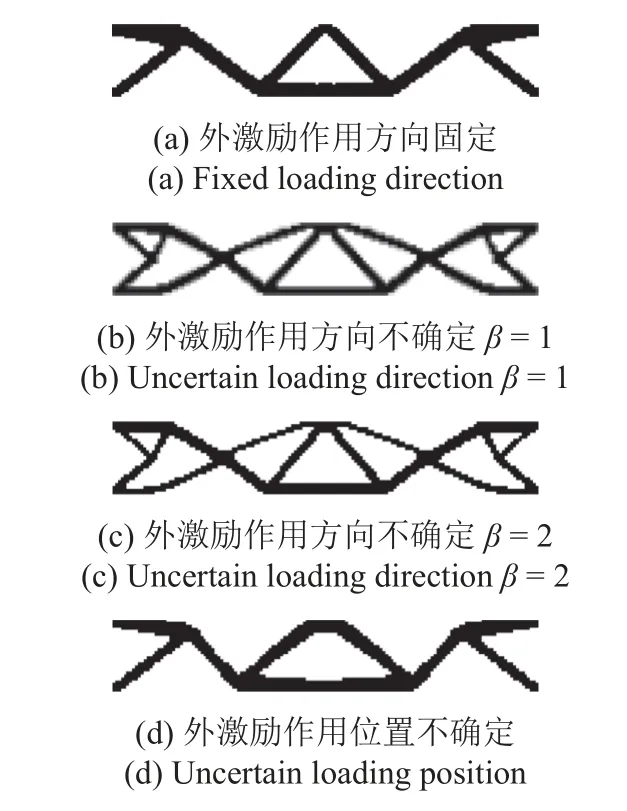
图7 两种设计策略结构拓扑优化结果对比Fig.7 Comparison of the topology optimizations on two different design strategies
对比图7(b)和图7(c)可以看出,当增大目标函数中标准差的权重因子β以后,所得稳健性优化设计中外侧倾斜构件的截面积有所减小,底部路径截面积有所增大.这使得在外激励作用方向扰动情形下,结构动柔顺度的响应值更加集中,即标准差更小.此外,文献[9]开展了考虑外激励作用位置不确定性的结构动态稳健性拓扑优化设计,采用区间变量表示外激励位置的扰动,并成功获得了该算例的稳健性最优构型设计,如图7(d)所示.可以看到,稳健性设计只在激励点周围构建了作用平台,明显扩宽了激励作用区域.但是,由于外载荷仍然沿竖直方向作用在结构上,因此缺少额外的倾斜传力构件.
表5 列出了两种设计策略结构拓扑优化数值结果.经过比较可知,考虑了外激励方向不确定性的稳健性拓扑优化的动柔顺度标准差和变异系数,均明显小于确定性优化结果,使得结构抵抗外载荷作用方向扰动的能力更强.当权重因子β增大时,更加强调动柔顺度标准差在目标函数中的占比,优化设计所得结构的动柔顺度标准差会进一步降低,使得结构动柔顺度的变异系数进一步减小,即结构性能的稳健度更高.
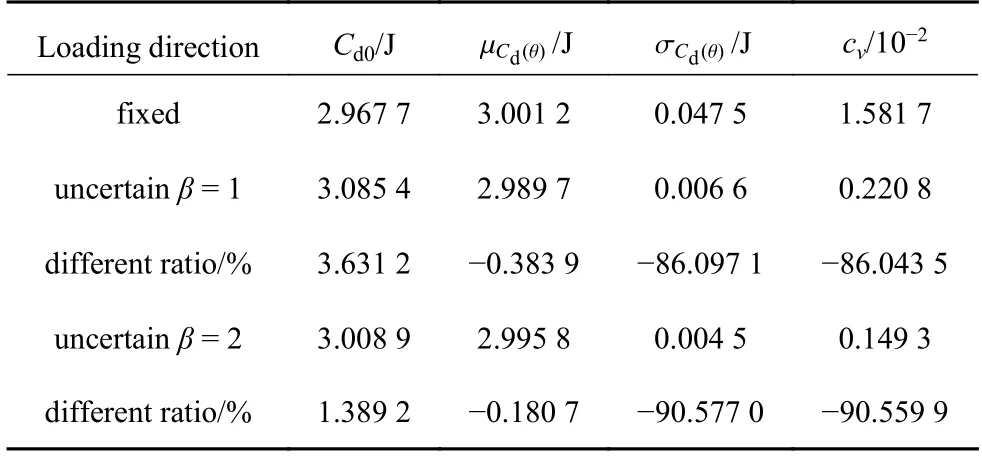
表5 结构拓扑优化结果对比Table 5 Comparison of the optimized results
如图8 所示,当外载荷不再沿着理想方向作用时,确定性结构设计的动柔顺度将快速增大.相比之下,稳健性结构设计的动柔顺度变化幅度相对较小,而且随着扰动角度的增大在逐渐减小.这说明稳健性设计的结构在外激励名义作用方向时动柔顺度最大,随着外激励作用方向的变化,相应的动柔顺度不会超过名义激励作用方向时的值.与前例类似,由于挪用了一定的结构材料构建额外的传力路径,稳健性设计结果的名义动柔顺度Cd0比确定性优化相应结果稍大一些.而对比两条稳健性设计的曲线还可以发现,当权重因子β增大以后,相应的名义动柔顺度值会有所减小,而外激励扰动状态下的动柔顺度将有所增加,总体上曲线更加平缓,即动柔顺度值的离散程度以及标准差值更小,这与表4 中的数值结果相一致.总体而言,结构的动柔顺度对激励方向变化更加不敏感.
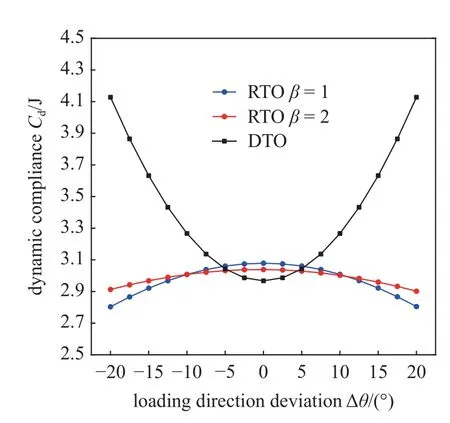
图8 结构动柔顺度随外激励作用方向变化情况Fig.8 Variation of the structural dynamic compliance caused by the external loading direction disturbances
图9 分别绘出了两种不同优化策略的名义结构动柔顺度迭代收敛曲线,同时还示出了迭代的中间构型和最终优化设计结果.在稳健性设计中,额外的倾斜构件从开始即存在,为外激励作用方向的变化提供可靠的传力路径.
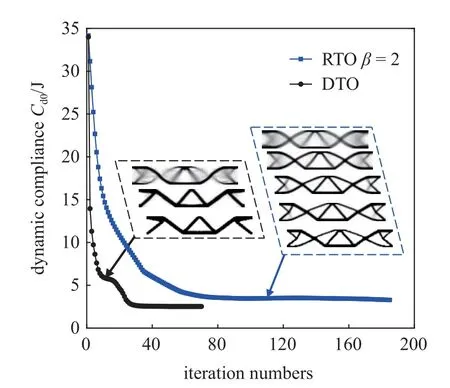
图9 两种设计策略拓扑优化收敛过程Fig.9 Convergence curves of the dynamic compliance on the two design strategies
4 结论
本文研究了在外激励作用方向不确定条件下,连续体结构动态稳健性拓扑优化设计问题.假设外激励作用方向的不确定性变化遵循正态随机分布,借助于二阶泰勒展开公式,推导了结构的动柔顺度期望和标准差及其对拓扑变量的一阶灵敏度显式表达公式.以结构动柔顺度均值和标准差的加权和为目标函数,充分考虑了载荷方向的不确定性对结构动响应的影响,且利用动柔顺度的变异系数作为结构稳健量的衡量指标.本文用两个典型算例,验证了所提结构稳健性拓扑优化设计方法的可行性.分析了结构构型优化设计变化的规律,并比较了结构的动柔顺度对外激励方向扰动的抵抗能力.研究结果如下.
(1) 考虑载荷作用方向不确定性条件下得到的稳健性结构拓扑构型设计,明显异与确定性条件下的拓扑优化结果.并且具有抵抗外激励作用方向可变性的必要构件,在载荷方向随机扰动情况下因而具有更可靠的传力路径.
(2) 当外载荷作用方向发生扰动时,稳健性拓扑优化设计的结构动柔顺度变化幅度和变异系数远低于相应的确定性优化结果.充分表明了稳健性优化设计所得结构抵抗外激励方向扰动的能力更强,动响应变化更小,结构的性能更加稳健.
(3) 在相同体积约束情况下,稳健性拓扑优化设计的名义动柔顺度稍大于相应的确定性拓扑优化结果.这是因为需要用一部分的材料构建抵抗外载荷作用方向扰动的必要构件,形成额外的传力路径.因而结构稳健性拓扑优化设计会损失一部分名义动刚度,以换取其抵抗载荷方向扰动能力的提高.但这部分损失的结构名义动刚度,可以通过增加少许结构材料而得到有效弥补.
