垂直发射条件下水下航行体头型对通气空泡流动及压力特性的影响分析1)
2023-12-16任泽宇王小刚权晓波程少华
任泽宇 王小刚 ,2) 权晓波 程少华
* (哈尔滨工业大学航天学院,哈尔滨 150001)
† (北京宇航系统工程研究所,北京 100076)
引言
通气空泡附着于高速运动的水下航行体时,会改善航行体受到的流体动力载荷,增加航行体的弹道稳定性和结构可靠性[1-3].然而通气空泡的流动涉及到多相流、湍流、非稳态等复杂问题[4-6],受到初始条件、边界条件以及航行体自身结构设计等因素的影响,通气空泡的初生、发展以及泄气等空泡动力学行为变得更为复杂,进而影响水下航行体的弹道和结构特性[7-9].
传统的通气空泡研究大多依托于循环水洞开展,利用高速摄像机和粒子图像测速(particle image velocimetry,PIV)等实验技术,探究了通气量[10]、来流速度[11]、空化器尺寸[12]以及阻塞率[13]等因素对通气空泡流动特性及载荷特性的影响.然而,以循环水洞为背景的通气空泡研究弱化了重力和水深等因素的影响,与水下垂直发射的工程应用背景存在较大差异[14].为此,Chen 等[15]、胡少峰[16]和龚瑞岩[17]共同设计了垂直约束式水下发射平台,通过拖曳方式实现了水下航行体在垂直方向的单自由度强迫运动,同时设计了均压排气系统以研究垂直发射条件下水下航行体通气空泡的流动特性;基于上述实验平台,Gan 等[18]和Qu 等[19]通过气孔排气的方式研究了垂直发射条件下通气空泡的流动特性,发现垂直发展过程中通气空泡表面呈现平滑、褶皱以及泡沫状等多种流态,通过改变通气量等参数可以增加通气空泡尺寸并抑制回射流的产生.同时,通气空泡在发展过程中气液界面还涉及表面张力的问题,Gan 等[20]和Li 等[21-23]分别基于有限体积法和边界元方法研究了表面张力对通气空泡的影响,发现在垂向来流的作用下,表面张力的降低会加剧通气空泡的变形程度.除去环境因素的影响,水下航行体头型等结构设计因素对通气空泡同样有着重要影响,杨茂等[24]和Zhang 等[25]分别研究了半圆头型和锥头头型航行体的通气空泡流动特性,通过对比二者的研究结果发现,锥头头型航行体通气云空泡占比更大,空泡浮动等三维流动特性更为剧烈,而其中差异产生的原因尚未清晰.所以,头型对通气空泡流动特性的影响尚未有系统的阐述,其在空泡演化过程中的力学影响机制需进一步探究.
由于实验条件的限制(拍摄相机曝光、多数据系统同步以及PIV 气体示踪粒子等问题),通气空泡实验研究所能获得的信息有限,部分通气空泡的研究开始转向数值仿真,通气空泡仿真常用的湍流模拟方法为雷诺时均(Reynolds average Navier-Stokes,RANS)类方法.Sun 等[26]基于蒙特卡洛方法构造了初始条件的随机样本空间,采用SSTk-ω模型研究了随机条件下通气空泡形态的不确定性;高山等[27]采用RNGk-ε湍流模型对三维潜射航行体肩部通气进行了数值计算,发现垂直发射条件下通气量的增加可以有效减小航行体所受阻力.
然而通气空泡流动涉及到大范围的流动分离以及涡旋流动问题,传统的RANS 方法难以获得较好的计算结果.随着计算流体力学的发展,大涡模拟类(large eddy simulation,LES)的湍流模型逐渐应用于多相流仿真并取得了较好的成果.针对螺旋桨的梢涡空化问题,孙大鹏等[28]对比了RANS 模型和LES 模型的仿真结果,发现LES 模型可以捕捉到梢隙流场中随机脱落的分离涡,获得更多的流场细节;为了提高计算稳定性和计算效率,结合RANS 模型和LES 模型,Menter 等[29]提出了分离涡模型(detached eddy simulation,DES),该模型在近壁面区域采用RANS 模型进行计算,其他计算区域采用LES 模型进行计算;随后,针对DES 模拟中存在的网格诱导分离[30](grid induced separation,GIS) 等问题,Spalart 等[31]和Shur 等[32]先后对DES 模型中的湍流耗散项进行修正,最终得到改进型延迟分离涡(improved delayed detached eddy simulation,IDDES)模型;高山等[33]和Gao 等[34]将IDDES 模型应用于尾空泡的瞬态计算,将数值结果和实验结果对比发现,IDDES 模型可以精确捕捉水下航行过程中尾涡的脱落现象,并基于Ω方法获得了丰富的涡量结构.所以,IDDES 模型适用于多相流的复杂非定常计算,团队前期的研究成果[35]也验证了该湍流模型在通气空泡研究中的适用性.
本文仿真采用重叠网格技术定义水下航行体运动,并结合IDDES 模型研究了头型对垂直发射条件下通气空泡流动特性和航行体表面压力分布规律的差异,并从涡量动力学的角度分析了差异产生的力学机理.
1 数值方法及有效性验证
本文仿真计算采用有限体积法对流动控制方程进行离散,采用隐式VOF 模型对相界面进行多相流计算,其中水相设置为主相,气相设置为副相;湍流模型采用IDDES 模型;采用重叠网格方法实现水下航行体的单自由度强迫运动.计算的控制方程如下.
(1) 连续性方程
式中,ρm为流体的混合密度,u为流体质点的运动速度.
(2) 动量方程
式中,µm,λm和F分别表示混合介质动力黏度、混合介质第二黏度以及体积力项.
(3) 能量方程
通气空泡流动的能量守恒以及理想气体的状态方程都需要求解如下能量方程
式中,E和T分别为混合介质的能量和温度,为体积加热率,kd为导热率,Φ 为能量耗散项.
(4) 体积分数方程
通气空泡的膨胀-收缩等非定常演化过程涉及能量耗散,气体的不可压缩假设会造成能量耗散项的部分缺失[36],影响计算精度.所以,本文计算中将气体考虑为可压缩的理想气体,而将液态水作为恒密度的不可压缩流体,其中气体的密度采用理想气体状态方程计算
式中R为理想气体常数.
(5) 湍流模型
湍流计算采用的IDDES 模型基于RANSk-ω模型进行构造,引入混合尺度lIDDES对模型中的湍动能输运方程进行了修正,湍动能输运方程及其修正过程如下所示
式中,k为湍流动能,µ 为动力黏度,µt为湍流动力黏度,σk,β∗和CDES为模型系数,fβ∗ 为涡流延迟修正因 子,Pk为湍流生成项,为修正后的耗散率,lRANS和lLES分别为RANS 长度尺度和LES 长度尺度,∆mesh为网格长度尺度,在式(8)的长度尺度计算中引入混合函数和“提升”函数fe来增加壁面建模的LES (wall model large eddy simulation,WMLES)功能[37].模型系数 σk,CDES等参数的确定如下
式中,F1为混合函数,CDkw为交叉扩散系数,d为距壁面的距离,ν 为运动黏度,参考Menter[29]和Travin 等[38]的研究结果,模型系数 σk1,σk2,β∗,CDES,k-ω和CDES,k-ε的取值分别为0.85,1.00,0.09,0.78 和0.61.
为了验证本文数值方法的有效性,基于垂直约束式水下发射平台进行了验证实验,实验平台搭建等实验细节请参考文献[35],实验工况为:自由液面处的大气压强p0=4 kPa,运动距离h=0~0.25 m时,航行体做匀加速运动,随后航行体以U=5 m/s的运动速度匀速运动,航行体排气缝位置和肩部呈19°的角度.数值和实验的通气空泡形态对比如图1所示(h=0 为水下航行体的初始位置),α为气水体积分数,α=1 时该区域只存在水相,α=0 时该区域只存在气相,可以发现在半圆头航行体垂直出水过程中,通气空泡形态主要为透明状的通气空泡以及乳白色的通气云空泡,通过对比发现本文的数值方法可以较好地模拟通气空泡的流动特性,尤其对通气云状空泡的预测有着较高精度(数值结果中云空泡为气水相混合区域).但通气空泡实验中,航行体在运动后期和高速摄像机呈一定角度,会造成实验的观测误差;另外,由于滑台的运动使实验流场中存在横流,造成通气空泡尾部存在一定的外飘现象[39],使得数值仿真结果与实验结果在空泡形态预测上存在一定误差.但总体上二者对比良好,认为本文的数值方法有效,适用于垂直发射条件下复杂通气空泡仿真.
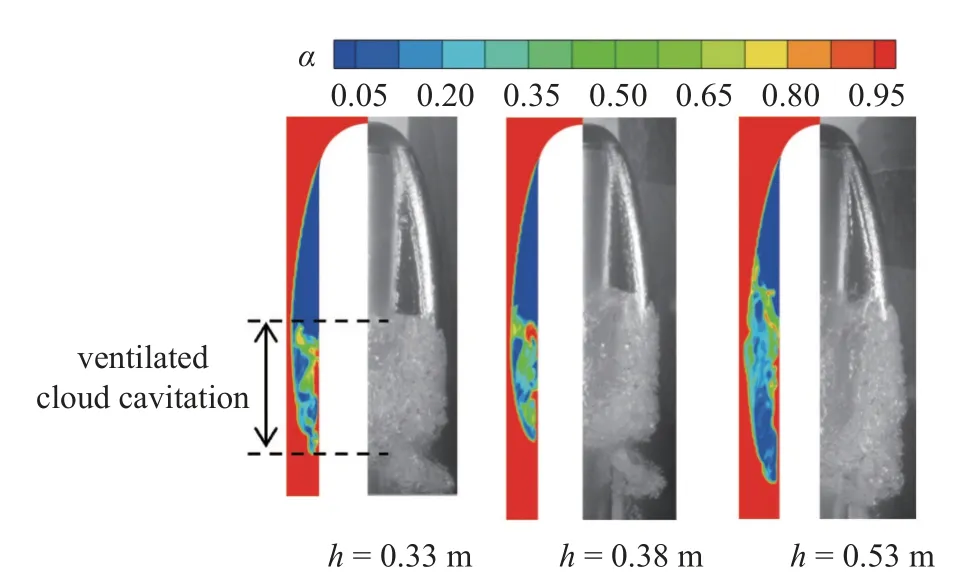
图1 数值方法有效性验证Fig.1 Numerical method validation
同时如图1 的验证工况所示,通气空泡下游的通气云空泡呈乳白色,其内由大量的微纳米气泡组成,在回射流和来流的剪切作用下,气液界面产生游离的小尺寸游离气泡,显然通气云空泡为考虑微小尺度空泡的多尺度多相流,该类多相流仿真在欧拉-拉格朗日计算框架下可以获得更加精确的结果[40-42].而本文基于均质多相流假设,仅针对宏观大尺度通气空泡进行计算,数值计算结果由连续相体积分数定义,忽略通气云空泡的粗糙表面以及内部的微纳米气泡,数值计算结果和实验结果具有相同的物理意义[43].
2 计算域划分及网格无关性验证
水下航行体几何尺寸参考实验模型进行设计,如图2(a)所示,根据航行体肩部是否存在曲率突变,将水下航行体的头型分为流线头型和钝头头型[44],以探究头型对通气空泡流动特性及压力特性的影响,其中流线头型取典型的半圆头形,钝头头型取典型的45°锥头头型;参考实验模型尺寸,本文水下航行体总长L=330 mm,宽度D=55 mm,x为航行体壁面位置距航行体头部顶点的距离,同时为了排出不可凝气体形成通气空泡,在航行体肩部设置宽度为1 mm 的排气缝,需要注意的是本文计算工况中排气缝位置和实验模型存在细微差异,以流线头型航行体为例,计算工况中排气缝位于曲率0 的航行体肩部以保证两个头型航行体排气缝位置相同,而实验工况中的流线型航行体排气缝位置与航行体肩部呈19°的角度.计算域划分如图2(b)所示,计算域整体高度为4.50L,宽度和长度均为0.83L,其中航行体水下航行距离为2.00L,气域高度为1.00L;为了有效利用计算资源,采用1/4 计算域,计算域底部及航行体表面设置为壁面边界条件,航行体肩部通气缝处设置为质量流量入口,zx和zy平面设置为对称平面,其余边界设置为压力出口边界条件.其中质量流量入口边界条件处的湍流动能k和和湍流耗散率通过湍流强度I和黏度比 µt/µ 来确定
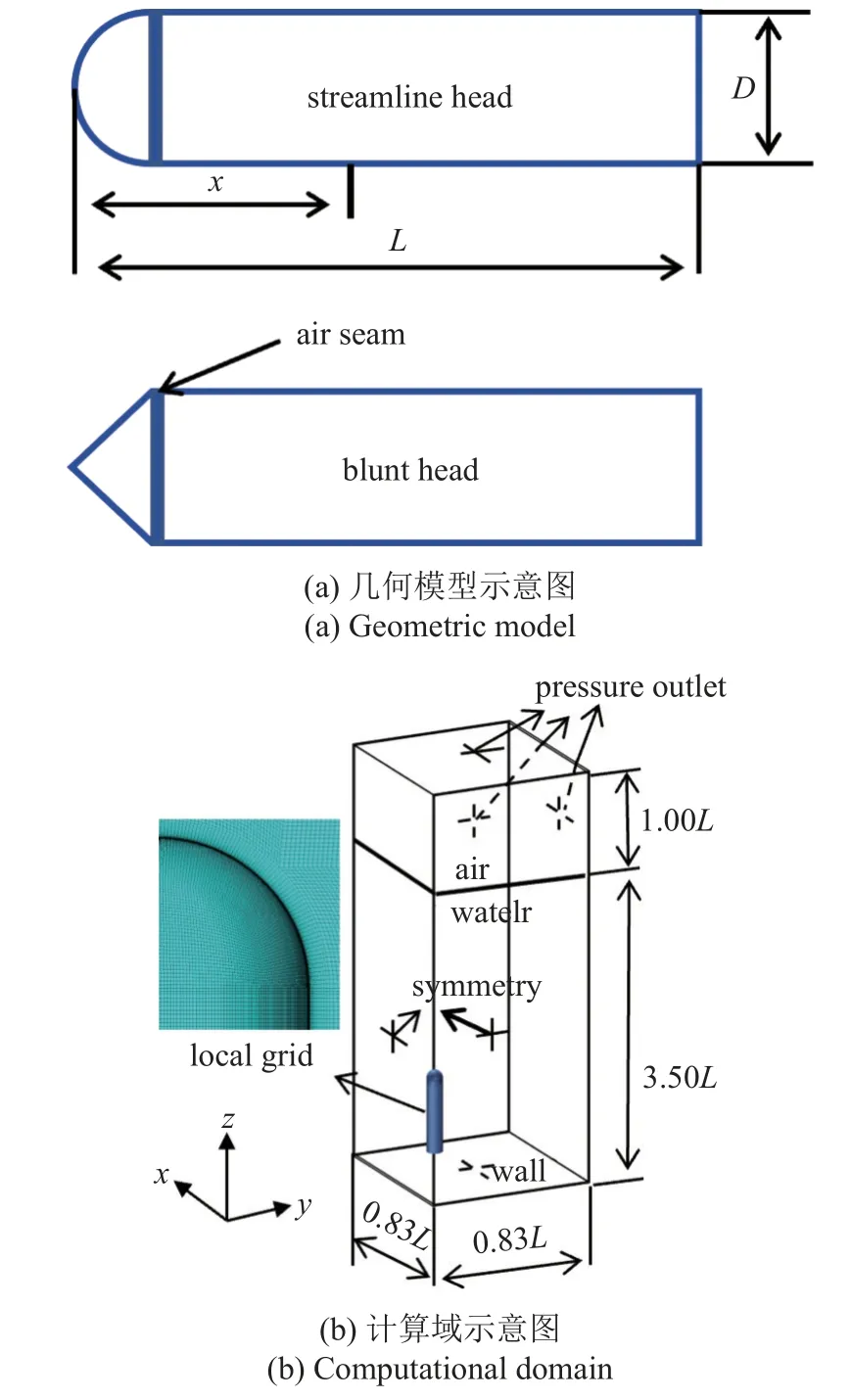
图2 几何模型及计算域设置Fig.2 Geometric models and computational domain settings
其中,uavg为入口处的流体平均流速,I取值0.05,µt/µ取值10.
计算域采用如图2(b)所示的六面体网格进行划分,水下航行体通过重叠网格技术实现单自由度强迫运动,第一层网格高度为2.0×10-6m,边界层网格增长率为1.2.
下面对部分参数进行无量纲处理,得到弗劳德数Fr,无量纲压力P,无量纲通气率Q,水下航行体无量纲航行距离H
其中,U为水下航行体匀速运动时的速度,p为所测压力,q为通气量,h为水下航行体的运动距离.
网格作为计算域的单元,其数量和质量对数值结果有着重要影响.本文分别设计了Mesh1,Mesh2,Mesh3 的网格划分方式,流线头型航行体计算域所对应的网格数量分别为279 万、341 万和537 万,钝头头型航行体计算域所对应的网格数量分别为265 万、336 万和533 万,无关性验证工况为:弗劳德数Fr=2.78,无量纲通气量Q0=7.11×10-5,自由液面处的无量纲压力P=0.45,图3 所示为H=0.18 时,不同网格划分方式下流线头型航行体和钝头头型航行体压力沿航行体轴向的分布规律,通过对比发现Mesh1 网格的计算结果和其他两种网格的计算结果存在一定差异,而Mesh2 和Mesh3 网格计算结果基本一致.
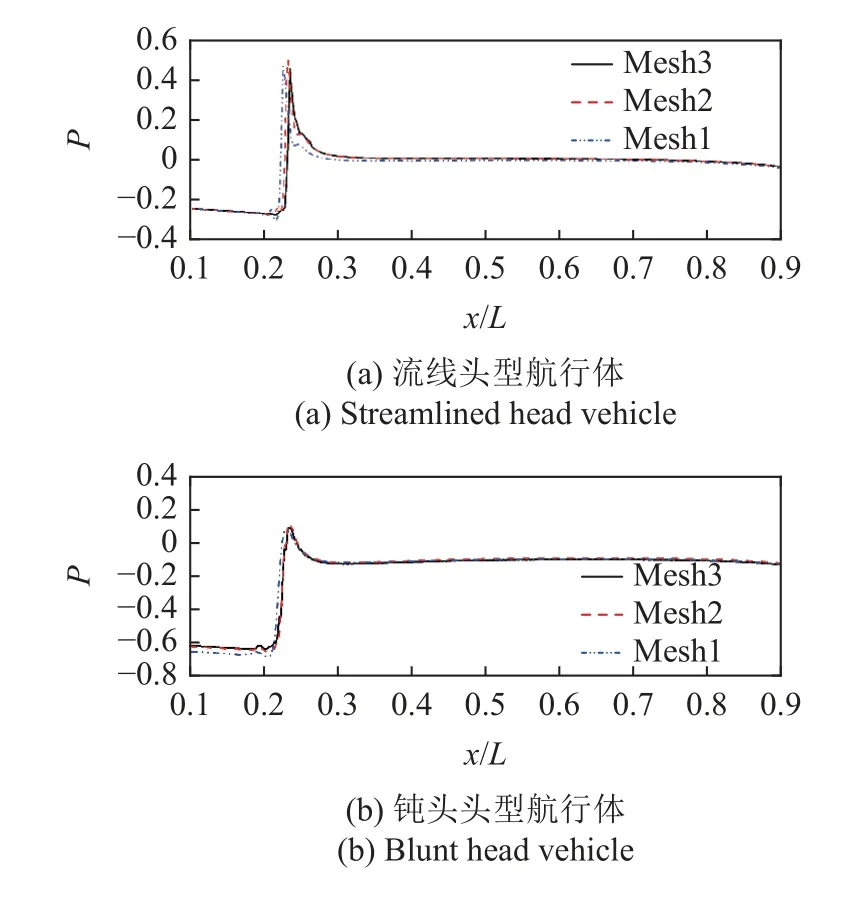
图3 网格无关性验证Fig.3 Validation of mesh independence
为了最终确定网格数量,将Mesh2 和Mesh3 在实验工况下的数值结果与通气空泡实验进行对比,如图4 所示,相比于Mesh2 和Mesh3 的网格划分方式有着更高的分辨率,其数值结果可以更好地捕捉到空泡脱落等流动细节.所以最终确定Mesh3 的网格划分方式,流线头型航行体计算域网格数量为537万,钝头航行体计算域网格数量为533 万.
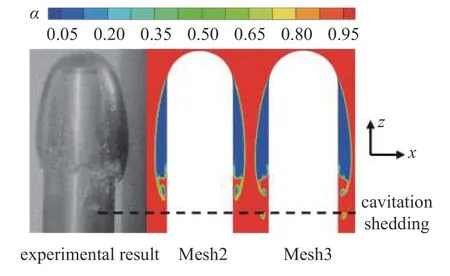
图4 不同网格划分方式下空泡形态的数值结果和实验结果对比(H=0.33)Fig.4 Comparison of numerical and experimental results of cavity morphology with different mesh (H=0.33)
采用Mesh3 网格进行时间步长无关性验证,所计算的工况为无关性验证工况,推进时间步长分别设置为 ∆t1=1×10-5s,∆t2=2×10-5s,∆t3=4×10-5s,图5 所示为H=0.18 时,不同时间步长下流线头型航行体和钝头头型航行体压力沿航行体轴向的分布规律,发现 ∆t2和 ∆t3时间步长下的压力分布规律相近,而 ∆t1时间步长下的压力分布规律和其他两个时间步长的压力分布规律存在一定差异.
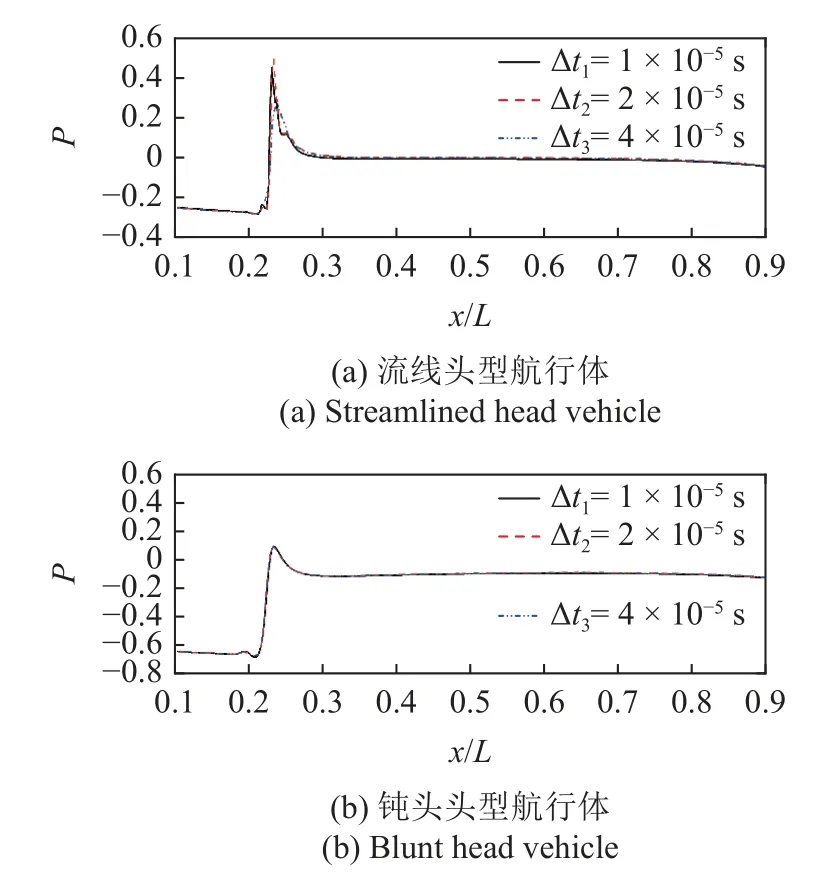
图5 时间步长无关性验证Fig.5 Verification of time-step independence
为了最终确定时间步长,将 ∆t2和 ∆t3时间步长在实验工况下的数值结果与通气空泡实验进行对比,如图6 所示,发现在 ∆t2和 ∆t3时间步长下数值计算结果都可以较好地捕捉空泡脱落等流动细节,所以为了保证计算效率,时间步长最终确定为 ∆t2.
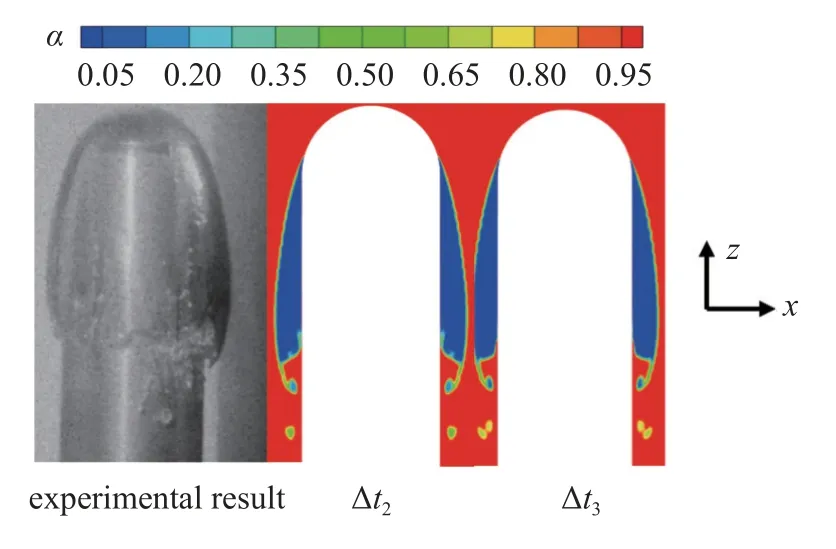
图6 不同时间步长下空泡形态的数值结果和实验结果对比(H=0.33)Fig.6 Comparison of numerical and experimental results of cavity morphology with different time step (H=0.33)
3 头型对通气空泡流动特性的影响
本小节探究垂直发射条件下流线头型航行体和钝头头型航行体通气空泡流动特性的差异,计算工况为:弗劳德数Fr=2.78,通气量Q0=7.11×10-5,自由液面处的无量纲压力P=0.45.计算工况下流线头型航行体的通气空泡演化过程如图7 所示,H=0.09 为通气空泡的初生阶段,不可凝气体在初始位置由排气缝排出,此时气体动量较大,通气空泡尺寸沿航行体径向迅速增加,空泡整体呈“水滴”形状;随后通气空泡进入发展阶段,在来流剪切的作用下,通气空泡不断向航行体下游发展;H=0.16 时通气空泡尾部与航行体壁面闭合并在闭合点处发生流动分离而形成滞止高压.在尾部滞止高压的驱动下,通气空泡末端形成轴向回射流向航行体上游运动;H=0.55 时,受到来自航行体上游通气空泡的阻碍,轴向回射流沿航行体上游运动时产生径向射流,径向射流前端达到通气空泡表面,使得通气空泡发生断裂,与以循环水洞为背景的通气空泡研究不同[45],垂直发射条件下的通气空泡发生断裂后并未发生大尺度脱落,而是在自身惯性作用下继续随着水下航行体运动.轴向回射流在向航行体上游运动过程中,携带大量水相进入通气空泡内部;在H=0.63 后水相随着径向射流涌入空泡断裂位置,并与不可凝气体相互掺混形成通气云空泡,随后(H=0.71~1.01)在回射流诱导下云空泡从空泡断裂位置分别向航行体上游和下游发展,使得云空泡覆盖占比逐渐增加.
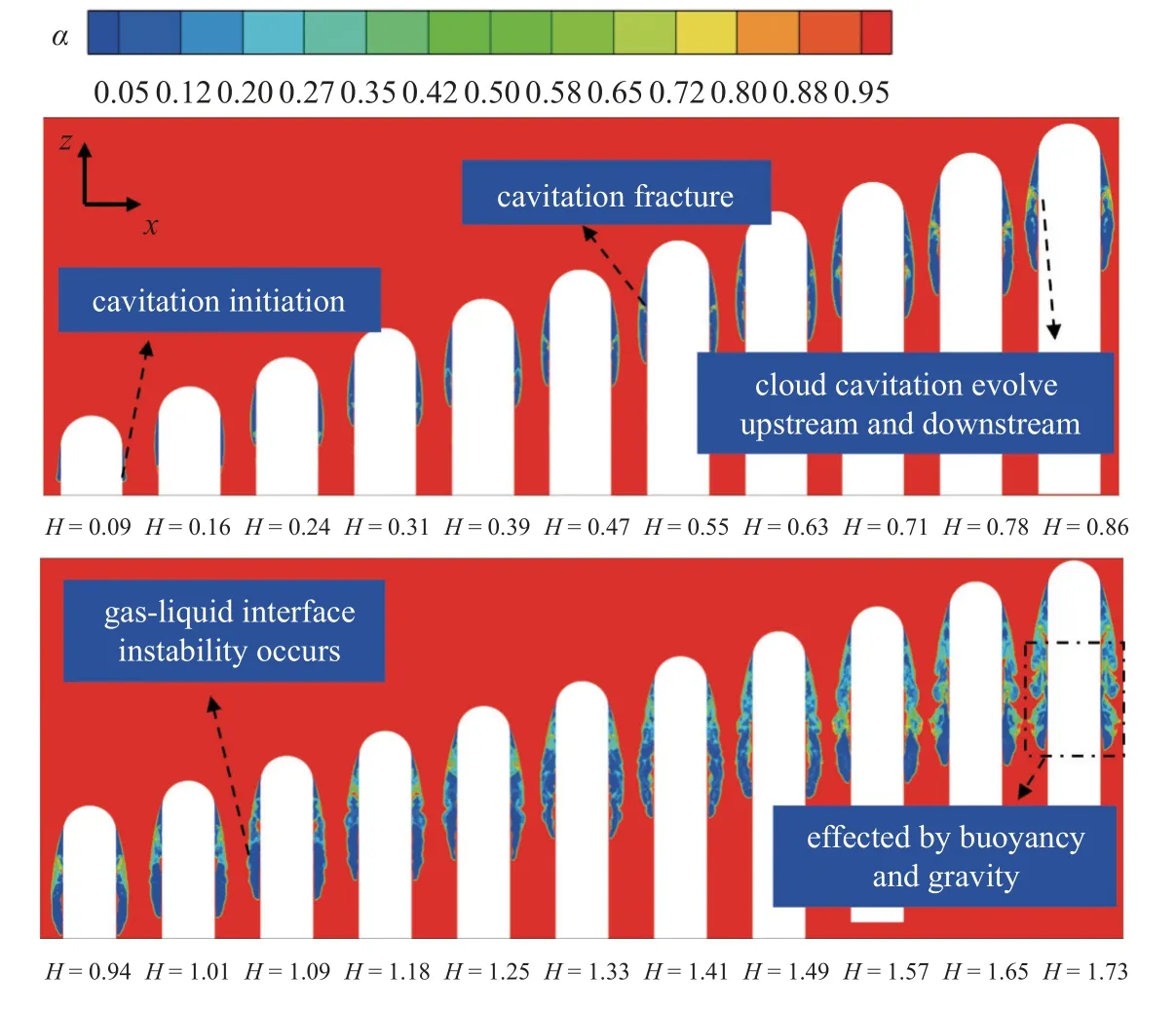
图7 流线头型航行体通气空泡形态Fig.7 Ventilated cavitation pattern of streamlined head vehicle
如图7 所示,流线头型航行体垂直运动初期(H=0.09~1.01),空泡演化主要受到惯性力影响,空泡的气液界面呈线性膨胀,气液界面光滑且连续;然而,随着通气空泡向航行体下游发展(H=1.09~1.73),通气空泡尾部的动量逐渐损失,且中游的云状空泡阻碍了上游气体汇入通气空泡下游,导致重力和浮力对通气空泡下游的影响逐渐增加,在Rayleigh-Taylor (R-T)不稳定性机制[46]的影响下通气空泡发生非线性失稳现象,非线性失稳区域的空泡产生浮动行为,气液掺混现象加剧,通气空泡出现无规律的膨胀-收缩的脉动行为,使得通气空泡失稳区域的气液界面不再连续.
垂直发射条件下钝头航行体的通气空泡演化过程如图8 所示,相比于流线头型航行体,钝头航行体空泡初生阶段空泡径向尺寸较大(H=0.09~0.16),在产生回射流后存在更为明显的回射流剪切(H=0.24~0.55);H=0.86~0.94 时径向射流将通气空泡切断,钝头航行体通气空泡下游较早发生非线性失稳现象,导致失稳区域的空泡产生更大尺度的浮动行为,空泡脉动幅度更大,随后在来流剪切作用下(H=1.01~1.73),通气空泡末端不断有小尺度空泡脱落.
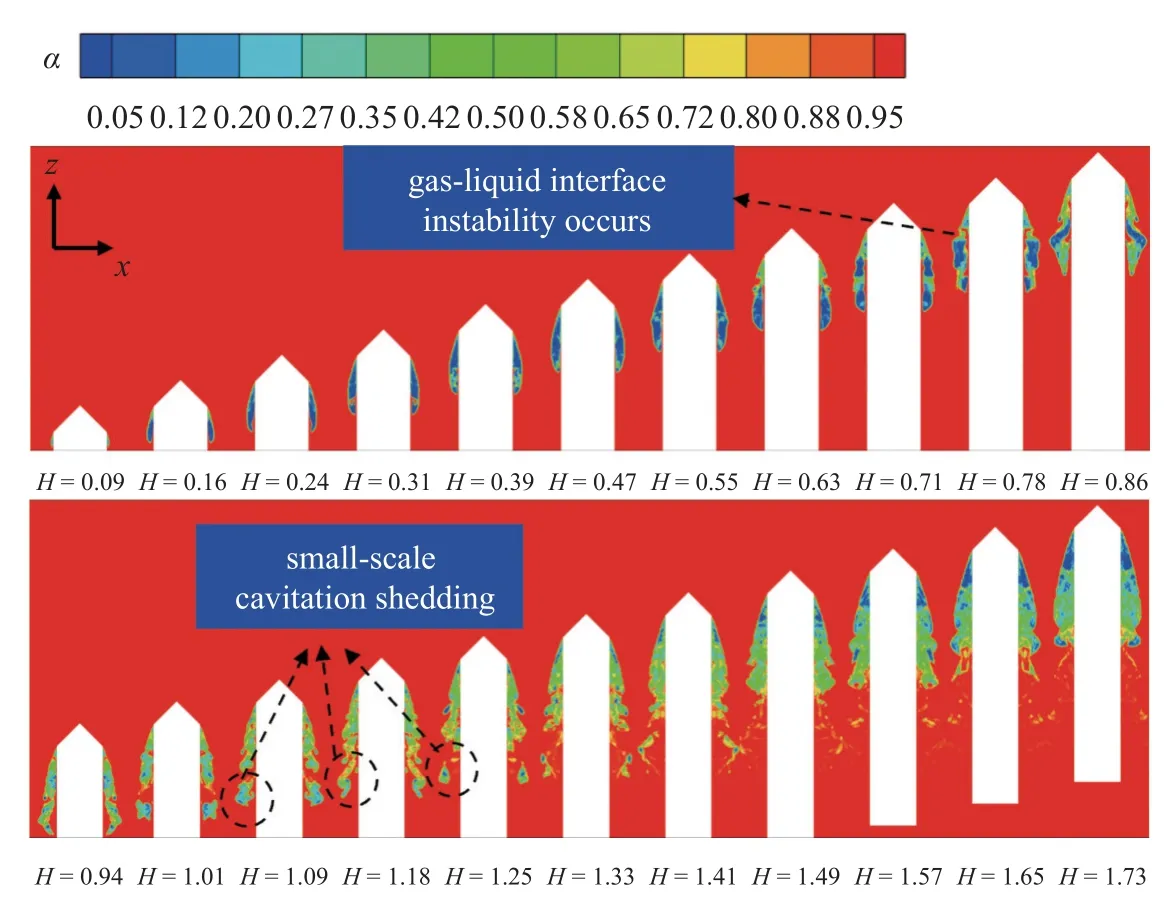
图8 钝头头型航行体通气空泡形态Fig.8 Ventilated cavitation pattern of blunt head vehicle
4 头型对通气空泡涡量分布的影响
通过对比分析流线头型和钝头头型水下航行体的通气空泡流动特性,发现钝头航行体的非线性失稳现象出现较早,并在随后的空泡演化过程中出现小尺度空泡脱落现象,这与流线头型航行体存在较大差异.为探究上述流动特性差异产生的原因,下面定义y=0 平面上的涡量ωy
式中,ux和uz分别为x方向和z方向的速度分量.根据式(21),流场的涡量来自区域的速度梯度,反映了空间速度分布的不均匀性.
图9 所示为H=0.31 时y=0 平面涡量ωy云图,轮廓为α=0.9 时的气水相等值线,通过对比发现头型对流体质点绕流航行体肩部后的运动方向产生了影响.流线头型航行体的喷射气体在受到来流剪切后依附于航行体表面,使得通气空泡前缘几乎与航行体轴线方向重合,并在轴线方向沿气液界面获得较大速度梯度[47],导致通气空泡在发展过程中主要受到惯性力影响,而重力和浮力影响较小,空泡抗剪切能力较强,使得回射流以轴向回射流为主,未观察到径向回射流;由于肩部存在曲率突变,流体质点在流经钝头航行体肩部时会沿着头型切线方向运动,钝头航行体空泡前缘与航行体轴线方向呈一定角度(与头型角度近似相同),这导致通气空泡径向方向存在相对较大的速度分量,而沿气液交界面方向轴向速度梯度相对较小,重力和浮力对空泡的影响较大,使得通气空泡较早产生大尺度径向射流并影响了后续钝头航行体通气空泡的非线性失稳.
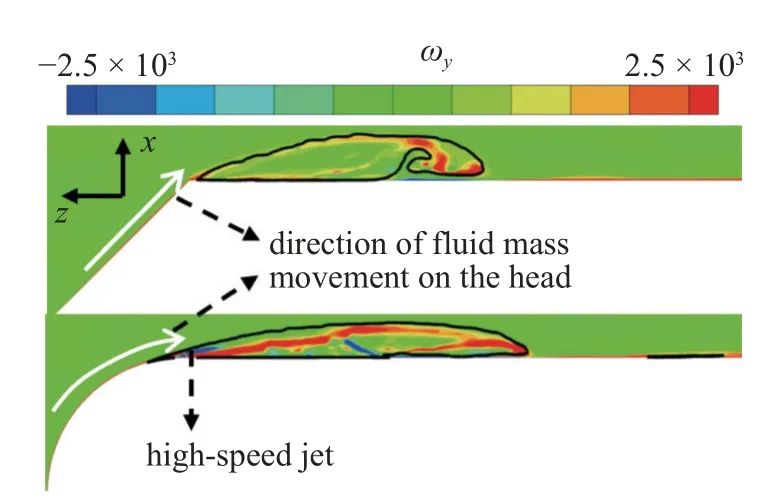
图9 H=0.31 时通气空泡的涡量云图Fig.9 Vorticity cloud map of ventilated cavitation at H=0.31
如图10 所示,H=0.78 时由于沿气液界面速度梯度较小,通气空泡末端在向航行体下游发展过程动量逐渐损失,增加了重力和浮力对通气空泡的影响,导致钝头航行体通气空泡发生非线性失稳,同时失稳区域内的涡量分布不均匀,加剧了失稳区域的空泡浮动行为和脉动幅度;相比之下,流线头型航行体排气缝沿气液界面不断输送高速气体,使得流线头型航行体通气空泡气液交界面处存在较大速度梯度,该位置处惯性力仍然是空泡形态的主要影响因素,使得流线头型空泡形态较为稳定.
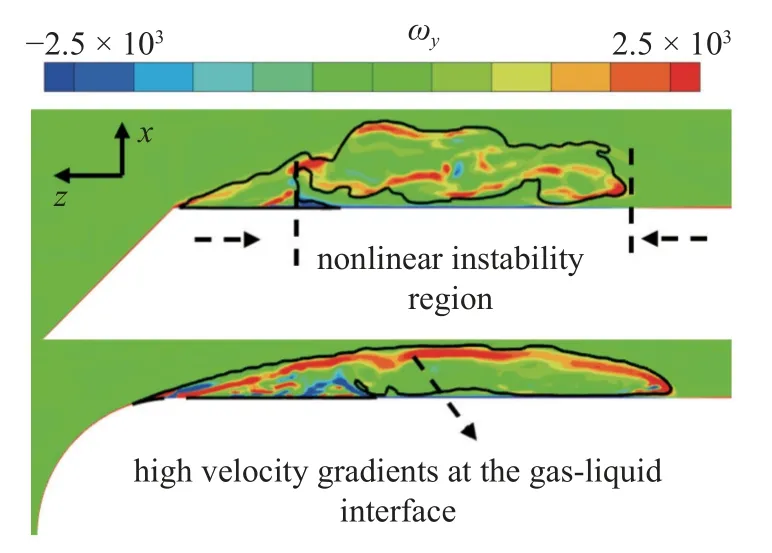
图10 H=0.78 时通气空泡的涡量云图Fig.10 Vorticity cloud map of ventilated cavitation at H=0.78
如图11 所示,H=1.25 时钝头航行体通气空泡末端涡量幅值较小,惯性力对通气空泡的影响较小,使得通气空泡抗来流剪切能力较弱,空泡附着性较差,导致通气空泡在回射流的剪切作用下发生脱落,同时通气空泡尾部有部分空泡以涡管的形式向航行体下游脱落;在该位置处,流线头型航行体通气空泡上游的气液界面仍然存在较大速度梯度,空泡未发生失稳,而由于动量损失,通气空泡下游发生了非线性失稳,但失稳区域的空泡浮动行为以及脉动幅度相对较弱.
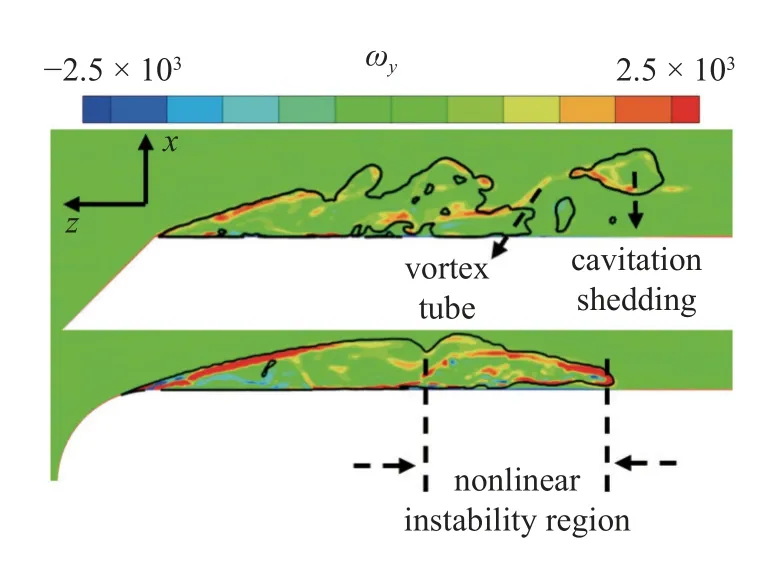
图11 H=1.25 时通气空泡的涡量云图Fig.11 Vorticity cloud map of ventilated cavitation at H=1.25
通过本小节分析发现钝头航行体的结构特性导致通气空泡气液界面处的涡量幅值较小,导致通气空泡抗剪切能力变弱,诱导了通气空泡的脱落.为了更好地理解流线头型航行体和钝头航行体通气空泡非定常脱落的差异,结合第3 小节通气空泡形态演化过程以及本小节的涡量分布特性,总结了在本文工况下钝头航行体通气空泡脱落的3 种形式:Type I,Type II 和Type III,如图12(a)所示,受到径向回射流的剪切,钝头航行体通气空泡多处发生断裂;随后,如图12(b)所示,由于惯性力作用较弱,同时附着的通气空泡下游在浮力的作用下发生非线性失稳,导致了剧烈的浮动行为,部分通气空泡在回射流的剪切作用下发生脱落(Type I);最后,如图12(c)所示,在空泡发生浮动以及气液掺混的过程中,部分气液界面在来流的剪切作用下发生破碎形成小尺度气泡向航行体下游脱落(Type II),另外在重力和浮力影响下空泡尾部产生较大的速度差异[48],形成沿来流方向的速度环量,通气空泡以涡管的形式发生脱落(Type III);图12(d)所示为H=1.41 时钝头航行体通气空泡的气水相云图,展示了上述3 种空泡脱落形态.
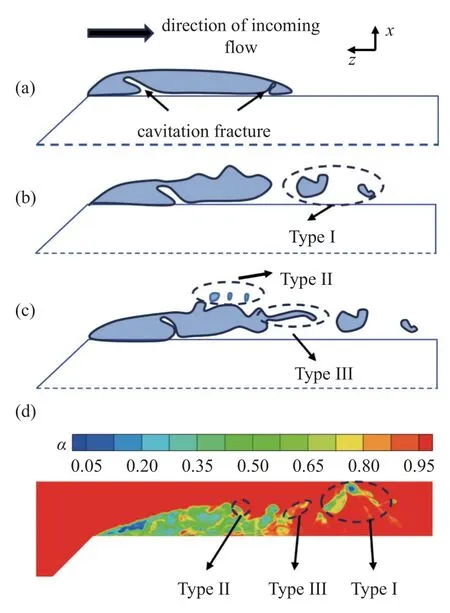
图12 钝头航行体空泡脱落示意图Fig.12 Cavitation shedding of blunt head vehicle
5 头型对通气空泡涡量输运的影响
早在水翼自然空化的问题研究中,Ducoin 等[49]、Cheng 等[50]和Chen 等[51]就发现旋涡的产生和输运是自然空泡演化过程中的重要特征,通过涡量输运方程[52]可以更好地解释自然空泡和旋涡的相互作用.而Wang 等[53]和本文的通气空泡研究中忽略了自然空化,通过注入不可凝气体在结构物表面形成通气空泡,不涉及汽-液相变,但通气空泡演化过程中仍然和旋涡存在强烈的相互作用,进而影响了通气空泡的非定常特性以及涡量场的演化,涡量输运方程的分析方法同样适合于本文的通气空泡研究.
通过第4 小节分析发现,相比于流线头型航行体,钝头航行体通气空泡较早发生非线性失稳后,空泡不稳定性较强,涡量空间分布的不匀均性更强,宏观表现为通气空泡浮动行为较为剧烈以及气-液界面脉动幅度较大,为探究上述差异产生的原因,重点关注速度梯度和空泡体积变化率对通气空泡非定常演化的影响,本小节通过涡量输运方程分析垂直发射条件下头型对涡量输运的影响
式中,ω 和u分别为流场的涡量矢量和速度矢量,等式(22)右边第一项 (ω·∇)u为方程的伸展项,表示速度空间分布的不均性对涡量的影响;第二项ω(∇·u)为方程的散度项,表示流体体积的变化对涡量的影响.
图13 所示为H=0.31,0.78,1.25,1.65 时伸展项(ω·∇)u对涡量输运的影响(取α=0.9 时的气-液相等值面表示空泡形态),伸展项 (ω·∇)u对涡量输运影响主要集中在排气缝处、回射流位置、非线性失稳区域.其中通气空泡发生非线性失稳后,气-液两相之间的质量交换加剧,云空泡覆盖占比逐渐增加,使得泡内存在多尺度涡旋,同时钝头航行体受到重力和浮力的影响较大,加剧了非线性失稳区速度分布的不均匀性.所以,在非线性失稳区域,钝头伸展项(ω·∇)u对涡量输运的影响明显大于流线头型航行体.
图14 所示为H=0.31,0.78,1.25,1.65 时散度项ω(∇·u)涡量输运的影响,通气空泡发展初期,受到头型影响,不可凝气体被钝头航行体排气缝排出后存在相对较高的径向速度分量,钝头航行体通气空泡的径向体积变化率高于流线头型航行体;在空泡发展后期的非线性失稳区域,通气空泡的浮动行为较为剧烈以及脉动幅度较大,流体体积变化率较大,使得钝头散度项对 ω (∇·u) 涡量输运的影响大于流线头型航行体.
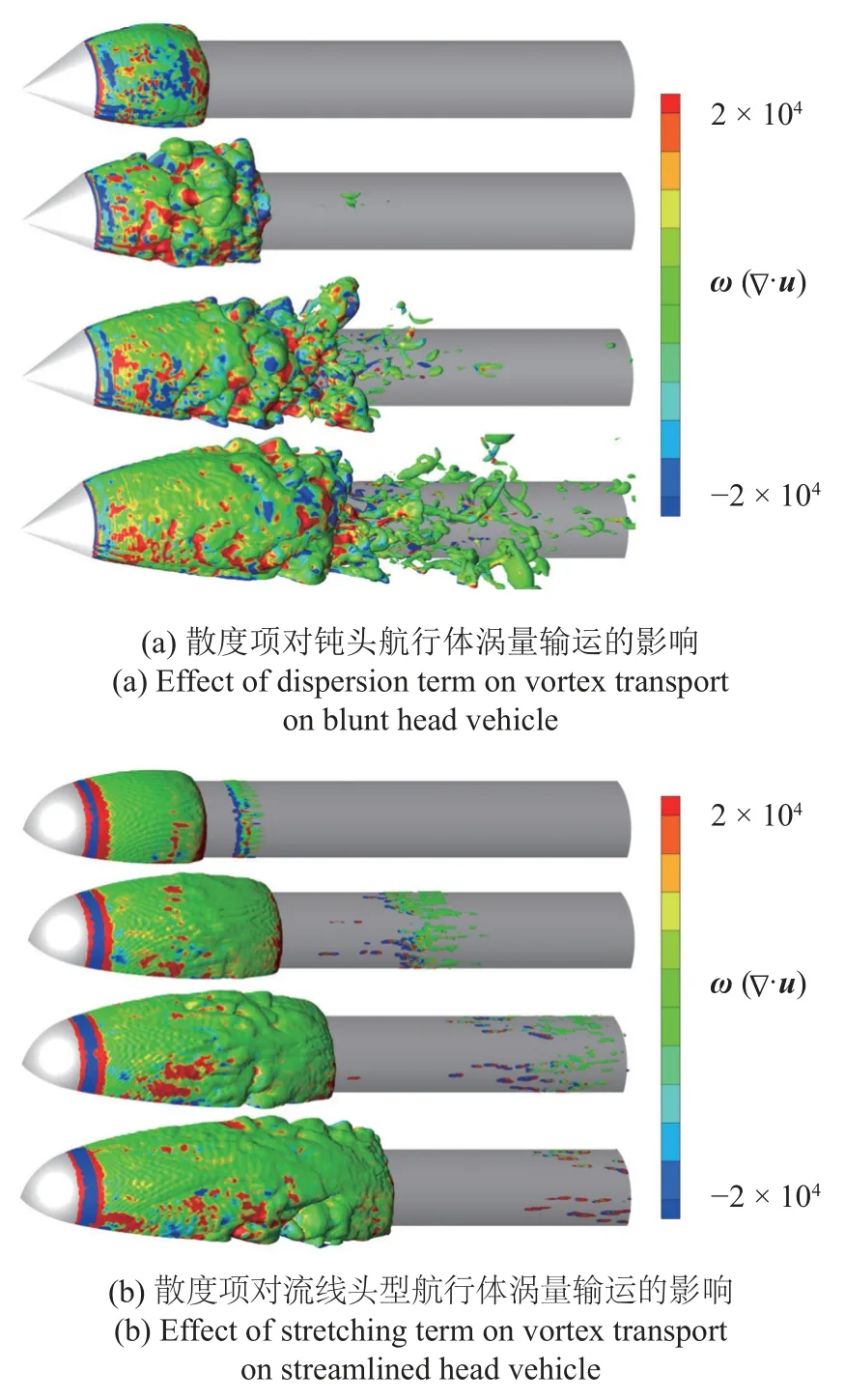
图14 散度项对涡量输运的影响Fig.14 Effect of dispersion term on vortex transport
通过对上述涡量输运的对比研究发现,钝头航行体在非线性失稳区域流体速度的空间不均匀性和流体体积变化率均高于流线头型航行体,钝头航行体通气空泡在该区域存在高幅值的涡量输运,使得钝头航行体通气空泡涡量分布的不均匀性增加,导致钝头航行体通气空泡不稳定性高于流线头型航行体,空泡脉动等非定常流动特性较为剧烈.
6 头型对通气空泡压力特性的影响
受到头型的影响,水下航行体通气空泡的压力特性同样存在差异.图15 所示为H=0.31,0.78,1.25,1.65 等典型位置处水下航行体无量纲压力P的轴向分布规律.如图15(a)所示,受到头型影响,钝头航行体的通气空泡向下游发展过程中具有较高的径向速度,使得空泡径向尺寸较大,导致空泡附着区域[44]压力整体低于流线头型空泡附着区域的压力.
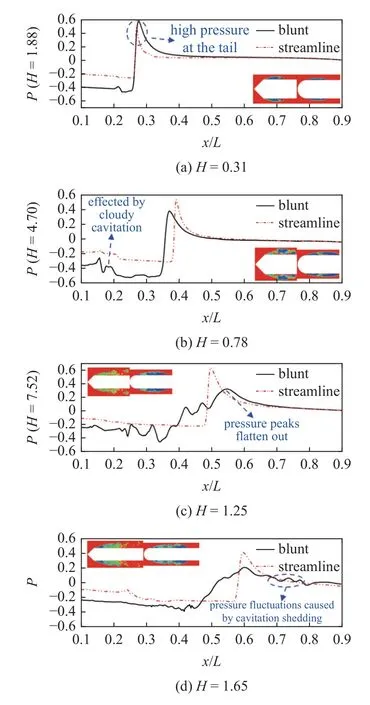
图15 典型位置处水下航行体轴向无量纲压力分布规律Fig.15 Underwater vehicle axial dimensionless pressure distribution law at a typical location
如图15(b)~图15(d)所示,H=0.78~1.65 时,钝头航行体通气空泡发生非线性失稳,导致气液质量交换加剧并形成大量云状空泡,这使得空泡附着区域内存在大幅压力波动;由于通气空泡不稳定性较强,钝头航行体在来流剪切下发生小尺度空泡脱落,导致航行体下游全湿区域产生小幅压力波动,同时小尺度空泡脱落影响了来流在空泡末端的流动分离,通气空泡末端滞止高压的高幅值特性逐渐趋于平缓.相比之下,流线头型航行体通气空泡与来流速度梯度较大,抗来流剪切能力强,未发生小尺度空泡脱落,来流在空泡末端发生流动分离后仍存在高幅值滞止高压的压力分布规律.
7 结论
本文基于IDDES 湍流模型、VOF 多相流模型以及重叠网格技术,建立了垂直发射条件下通气空泡的计算模型,通过对比得到了流线头型航行体和钝头头型航行体的通气空泡演化过程的差异.首先,通过涡量分布分析了钝头航行体通气空泡发生非线性失稳较早的原因;其次,通过涡量输运方程分析了钝头航行体通气空泡脉动等非定常流动特性较为剧烈的原因;最后,分析了由空泡流动特性差异导致的压力分布规律的差异,得到以下结论.
(1) 在垂直发射条件下,通气空泡发展的后期,空泡下游受到重力和浮力的影响增加,在瑞利-泰勒不稳定性机制的作用下,通气空泡下游发生非线性失稳,导致失稳区域出现浮动行为和空泡脱落等非定常流动特性.
(2) 相比于流线头型航行体,钝头航行体通气空泡气液交界面处的速度梯度较小,受到重力和浮力的影响较大,因此通气空泡较早发生非线性失稳,在空泡发展过程中气-液两相更容易发生掺混形成通气云空泡.
(3) 在非线性失稳区域,钝头航行体流体速度空间分布的不均匀性和体积变化率均大于流线头型航行体,使得钝头航行体通气空泡失稳区域的涡量输运幅值较高,涡量区域分布的不均匀性增加,导致空泡不稳定性较强,宏观上表现为空泡浮动和空泡脉动等非定常流动特性更为剧烈.
(4)钝头航行体通气空泡末端发生小尺度空泡脱落,影响了空泡末端的流动分离,从而抑制了通气空泡尾部滞止高压的高幅值特性;流线头型航行体通气空泡形态相对稳定,空泡末端仍然存在高幅值滞止高压的压力分布规律.
