一种基于柔性腿部与主动腰部的仿猫四足机器人设计方法
2023-12-09宋玉旺李江天滕鹏吴硕张致豪孟非
宋玉旺, 李江天, 滕鹏, 吴硕, 张致豪, 孟非
(1.华北电力大学能源动力与机械工程学院, 北京 102206; 2.北京邮电大学计算机学院, 北京 100876; 3.北京理工大学机电学院, 北京 100081)
在移动机器人的领域中,基于仿生学设计的足式机器人相比传统轮式机器人有着独特的优势,已经成为了国内外学者研究的主要方向。其中,由波士顿动力LittleDog领衔的兼具小体积、轻量化和高机动性的四足机器人更是学界备受关注的研究方向[1]。
在自然界的种种陆生动物中,四足动物在地形环境适应性和运动灵活性方面优势明显[2]。目前四足机器人大多以刚性结构设计而成,因此难以实现高效的跳高、越障和软着陆等同时需要较强驱动力和灵活性的动作[3]。在四足动物中,猫凭借其优异的腰腿部灵活性和肌肉爆发力,拥有着极强的运动能力[4-5]。部分研究人员从仿生腿部和仿生腰部方面开展了机器人的设计研究工作。
仿猫腿设计的仿生腿部机械结构研究起步较早。早在20世纪80年代,Raibert等[6]研究了可变阻尼的柔性腿部结构在四足机器人中的应用可行性和其平衡性控制。Kinsey等[7]研究的StarlETH利用20根弹簧模拟了生物肌肉和肌腱等结构在缓冲和储能方面的特性。Hiasa等[8]设计的小型四足机器人的腿部结构也是受到了猫的双关节肌腱复合体的启发。同时也出现了针对仿生机器人腿部关节柔顺性对其动力学影响的相关研究成果[9]。
近年来,中国众多高等院校和研究所也在柔性腿部结构进行了深入研究,如Dong等[10]基于弹性流体制动器研究设计的多自由度腿部结构,史延雷等[11]针对各类腿部结构设计的分析,Huang等[12]设计的四足机器人三维柔性腿部结构,赵江波等[13]研究的可保证四足机器人柔性触地的腿部控制方法和胡永赞等[14]针对刚柔耦合四句机器人运动仿真的研究。可见柔性腿部在四足机器人领域是一个重点研究方向且国内外已有着较多研究成果,不过现有的研究在兼顾轻量化和高效的腿部结构设计方面仍有不足,不能很好地将柔性腿部设计投入实际应用中。
仿生腰部的研究也是四足机器人研究领域的一个热点,离散式脊柱设计在四足机器人中已经应用多年。Park等[15]根据其研究的具有2自由度腰部关节的ELIRO-Ⅱ,实验证明了引入腰部结构的四足机器人相比传统刚性躯干的四足机器人有着更稳定的运动效果;同时,灵活的腰部扭动可以提升机器人可到达的区域。而后,Khoramshahi 等[16]设计的Bobcat用一个电机驱动的单自由度关节连接前后躯干,结合具有一定缓震能力的腿部结构,通过实验提出了脊柱的平行柔顺方法,降低了机器人运动过程中不必要的能量消耗。邢福泽[17]对柔性脊柱关节在四足机器人中的设计与控制展开了深入研究。但是目前的四足机器人腰部结构大多采用都是单关节设计,只能实现单方向的运动,运动范围受限,未能有效结合柔性腿部设计,不能满足动态要求。
针对目前常见的腿和腰结构仍然无法满足动态运行需求,参照猫的腿部骨骼结构和柔性组织,提出一种具有柔性腿部和主动腰部的仿猫四足机器人设计方法。首先,提出柔性腿部设计方法,通过弹簧阻尼器系统和拉簧绞盘系统的组合设计,模拟出猫的腿部骨骼肌肉和柔性组织特征,达到腿部肌肉和韧带在运动时的缓震储能效果,实现较强的机构运动能力。其次,提出主动腰部设计方法,利用万向节和鱼眼拉杆等机构形式,在前后躯干之间设计转动灵活、控制简单的两舵机驱动的并联腰结构,同时利用拖头万向节和尼龙套筒设计过定位稳定结构,实现腰部结构扭动时较强的运动稳定性。最后,利用三维运动仿真软件和实物原型机,通过步态行进、跳跃、摔落和越障等动作的对比试验,验证该仿猫机器人较强的运动灵活性、协调性和稳定性。
1 仿猫柔性缓震腿的设计
四足机器人的腿型和关节布置会直接影响机器人的运动性能,大多数四足机器人采用易于设计和控制的全肘式。而在自然界中,四足动物的腿部结构更近似于内膝肘式,图1展示了猫的主要骨骼肌肉。也有相关研究表明:从机器人配置对性能的敏感度考虑,内膝肘式对髋关节和膝关节幅值变化敏感度更低,运动稳定性更好[18]。因此,本研究充分参考猫腿的骨骼肌肉特征,结合传统刚性四足机器人常用的腿部结构,进行结构不同的仿猫前后腿设计。
1.1 后腿结构设计
经过对猫的腿部结构的仿生学研究,机械猫的后腿腿部结构仿照猫的后腿部骨骼肌肉结构特点:由腓骨、股骨、胫骨与中骨互相连接构成类似平行四边形的四连杆机构。通过进一步的仿生学研究、理论分析和实物测试,不断进行调整优化,最终机械猫后腿腿部结构如图2所示。其中,后腿大腿侧板对应图1中A处的股骨,后腿腿部连杆对应图1中D处的胫骨,后腿大腿拉簧系统对应图1中F处的股二头肌,小腿拉簧系统对应图1中G处的腓肠肌。该机械猫后腿髋关节运动范围为0°~180°,膝关节运动范围为44°~105°。此外,机械猫采用分离式尼龙块与小腿侧板组合作为足端,进一步提高了落地缓冲效果。
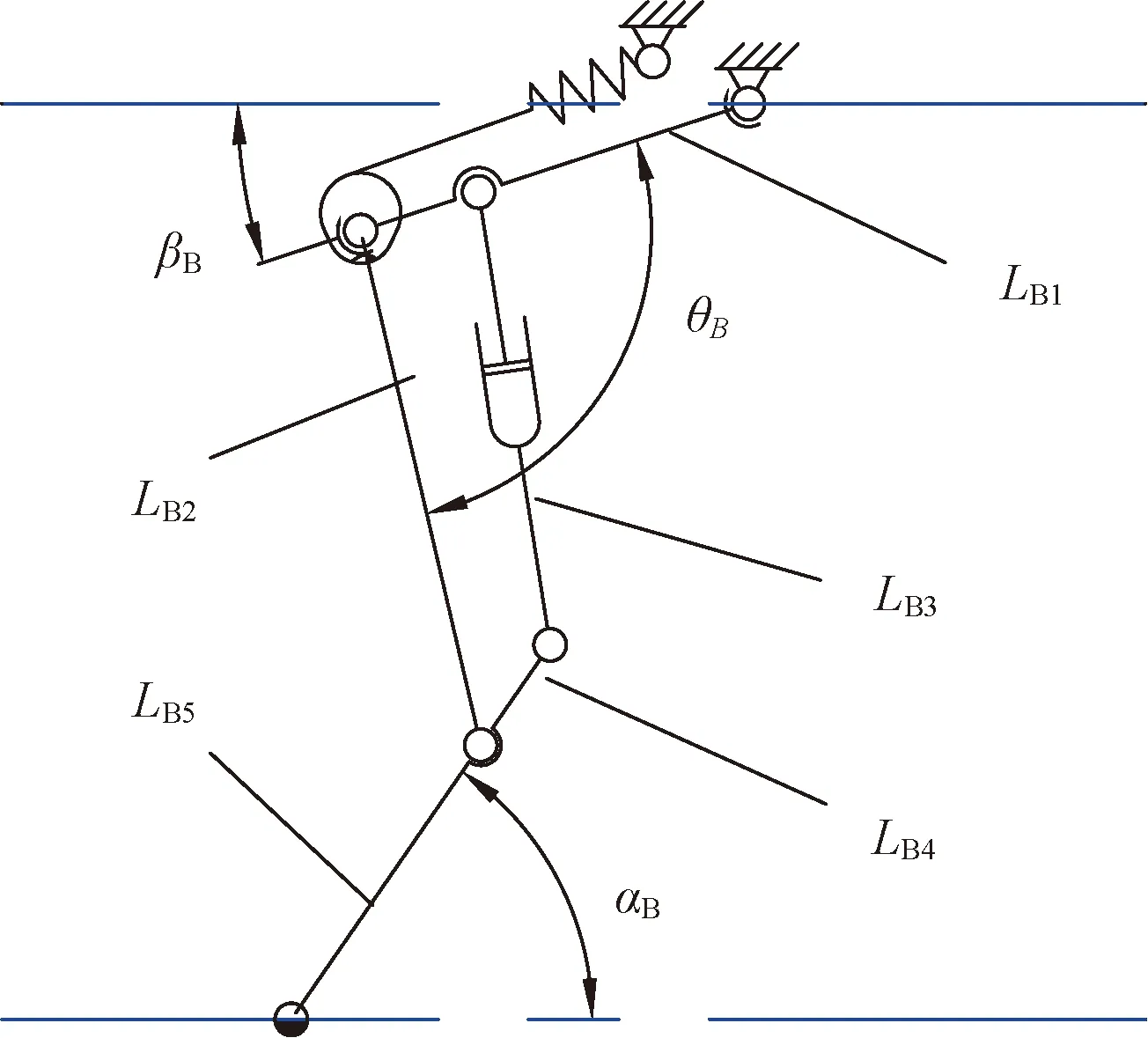
LB1为后腿髋关节与膝关节舵机间距;LB2为后腿膝关节舵机到小腿侧板与腿部连杆的连接点的距离;LB3为后腿阻尼器长度;LB4为后腿阻尼器、腿部连杆与小腿侧板连接点距离;LB5为后腿腿部连杆与小腿侧板连接点到足端橡胶中心距离;αB为后腿小腿侧板与地面夹角; βB为后腿大腿侧板与后躯干夹角;θB为后腿大腿侧板与腿部连 杆夹角

图2 后腿机构运动简图、三维模型与物理样机Fig.2 Skeleton of mechanism, 3D model and physical prototype of the hind legs
该机械猫后腿主要由舵机及其支架、阻尼器、拉簧系统及其固定绞盘和其余刚性结构部件组成。
除基础的行走功能外,该机械猫后腿柔性关节结构在跳跃起跳与落地过程中起到类似猫腓肠肌的功能,阻尼器通过压缩将落地刚性冲击转化为柔性冲击并吸收部分冲击,拉簧系统通过拉伸在起跳时提供拉力使后腿收缩更快速,提高起跳时加速度从而提高机械猫跳跃高度与距离。
1.2 后腿结构力学分析
机械猫整体受力情况如图3所示。
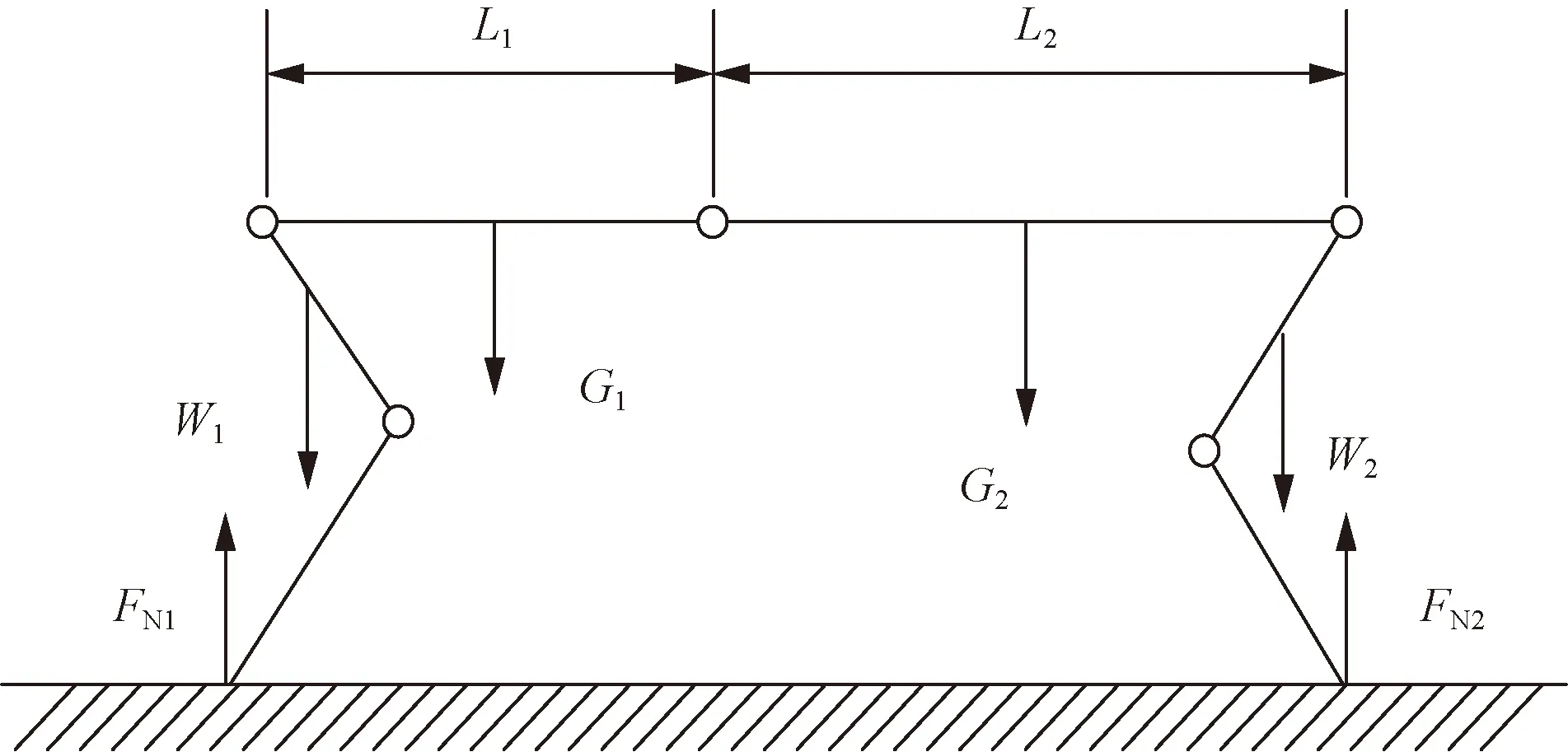
G1为前躯干重;L1为长度;G2为后躯干重;L2为长度;W1为前腿自重; FN1为受地面支持力;W2为后腿自重;FN2为受地面支持力图3 机械猫整体受力情况Fig.3 Overall force of mechanical cat
根据图2(a)后腿机构运动简图,以髋关节舵机为原点建立x-z坐标系,进而可得后腿腿部连杆受力与后腿阻尼器所受力分别为TB1与TB2。其计算公式为
(1)
(2)
通过后腿腿部连杆受力与后腿阻尼器受力情况为后腿腿部连杆与阻尼器选用了合适的材料与阻尼系数。
进一步可得到后腿膝关节舵机扭矩MB1,髋关节舵机扭矩MB2。其计算公式为
MB1=FN2[LB5cosαB-LB2cos(θB-βB)]+
(3)
MB2=FN2[LB1cosβB-LB2cos(θB-βB)+

(4)
由所求的舵机转矩关系,对机械猫腿部结构进行优化,减小舵机所受力矩并提高结构强度与运动稳定性。
该机械猫后腿在起跳前缓慢蜷曲,使弹簧受力压缩并储存能量;在起跳瞬间机械猫后腿快速的完全伸展,弹簧伸长释放的能量与后腿舵机转动带来的力矩给机械猫一个较大的加速度;在落地前的滞空状态,机械猫后腿再适当蜷缩并调整后腿姿态,使落地时的冲击对后腿影响最小。
1.3 前腿结构设计
机械猫前腿设计与后腿相应的参照了猫的前腿骨骼肌肉特点:由尺骨、肱骨、桡骨与中骨互相连接构成类似平行四边形的四连杆机构。通过进一步的仿生学研究、理论分析和实物测试,不断进行调整优化,最终机械猫前腿腿部结构如图4中前腿实物所示。其中,前腿大腿侧板对应图1中B处的肱骨,前腿腿部连杆对应图1中C处的桡骨,前腿大腿拉簧系统对应图1中E处的肱三头肌。该机械猫前腿髋关节运动范围为0°~180°,膝关节运动范围为57°~150°。
考虑到猫实际的前腿骨骼结构与后腿骨骼结构的差异,在进一步仿生学研究的基础上,机械猫的前腿安装在后腿安装的基础上反装,使机械猫前后腿部如猫一样腿部膝关节相对,并优化调整了机械猫前腿腿部各结构参数。
此外,本文优化了机械猫着陆方式,机械猫前腿小腿侧板由直侧板修改为V字形侧板,提高前腿足端可达范围,使前腿在落地时先着地,减小落地时冲击对机械猫整体影响。
1.4 前腿结构力学分析
根据图4(a)前腿机构运动简图,以髋关节舵机为原点建立x-z坐标系,进而可得前腿腿部连杆受力与前腿阻尼器所受力分别为TF1与TF2。其计算公式为

LF4sinθF
(6)
通过前腿腿部连杆受力与前腿阻尼器受力情况为前腿腿部连杆与阻尼器选用合适的长度比例与材料,使机械猫前腿落地时有着更好的缓冲效果。
进一步可得到前腿膝关节舵机扭矩MF1,髋关节舵机扭矩MF2。其计算公式为
MF1=FN1[LF2cos(θF-βF)+LF5cosθF]+
(7)
MF2=FN1[LF5cosαF-LF1cosβF+
(8)
由所求的舵机转矩关系,对机械猫腿部结构进行优化,调整机械猫落地时前腿姿态,使前腿最先着地,使落地缓冲能力进一步提高。
该机械猫前腿在起跳前缓慢蜷曲,使压簧受力压缩并储存能量;在起跳瞬间快速的向前伸展,使机械猫前腿足端可达距离提升,提高跳跃距离;在落地前的滞空状态,前腿将受控适当蜷曲并调整前腿姿态,确保落地时前腿先着地并且落地时的冲击对机械猫整体平衡性影响最小。
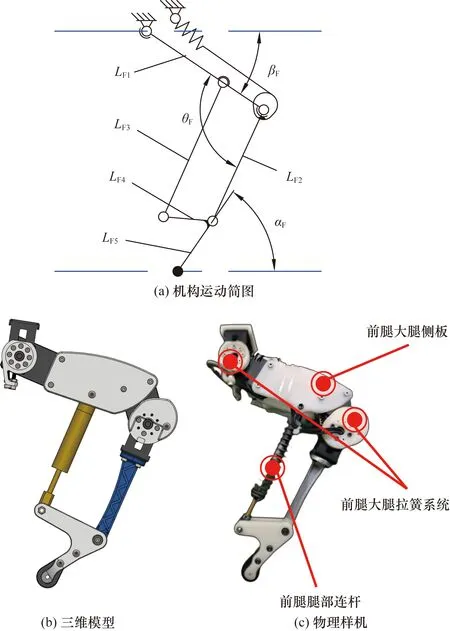
LF1为前腿髋关节与膝关节舵机间距;LF2为前腿膝关节舵机到小腿侧板与腿部连杆的连接点的距离;LF3为前腿阻尼器长度;LF4为前腿阻尼器、腿部连杆与小腿侧板连接点距离;LF5为前腿腿部连杆与小腿侧板连接点到足端橡胶中心距离;αF为前腿小腿侧板与地面夹角;βF为前 腿大腿侧板与前躯干夹角;θF为前腿大腿侧板与腿部连杆夹角图4 前腿机构运动简图、三维模型与物理样机Fig.4 Skeleton of mechanism, 3D model and physical prototype of the front legs
2 躯干与腰部结构的设计
机械猫躯干由后躯干、主动腰部、前躯干、躯干延长件、机械猫猫头共五部分组成,如图5所示。机械猫后腿安装在后躯干上,机械猫前腿安装在躯干延长件上,通过调整前后躯干长度与宽度比例,是机械猫在四足站立时的整体重心在水平面的投影位于机械猫前后腿足端对角线交点上,提机械猫平衡能力。
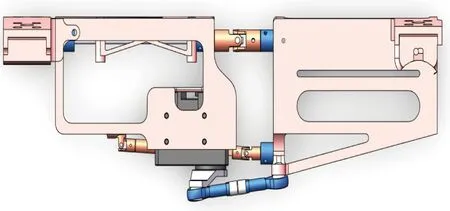
图5 躯干与腰部结构三维模型Fig.5 3D model of the body and waist structure
2.1 主动腰部的设计
经过对猫的脊柱在运动过程中的动态性能的仿生学研究,机械猫的主动腰部对猫的腰部功能进行仿生并设计了合理的腰部长度与宽度比例;通过改变前后躯干与后躯干的相对位置的方式实现腰部转动。
此外,基于对猫的腰部结构特点的仿生,主动腰部的各结构设计了具有相近功能的结构形状,主动腰部中万向节对应猫腰部的脊椎,腰部舵机、舵机曲柄与鱼眼拉杆设计对应猫腰部的腰背肌肉。通过腰部舵机转动改变前后躯干相对位置,从而实现啊俯仰角与航向角两个自由度的转动,最大转角为俯仰角±23.9°,航向角±37.2°。
主动腰部由扭动机构和过定位稳定机构组成。基于对猫腰部的功能仿生和相关模型结构,简化出了如图6所示的腰部机构运动简图,该扭动机构由腰部舵机、舵机曲柄、鱼眼拉杆、躯干固定轴以及万向节组成,躯干固定轴贯穿前后躯干并通过万向节连接,通过控制腰部舵机转角改变前后躯干相对位置,使前躯干以万向节为中心相对后躯干灵活转动,从而实现俯仰角与航向角两个自由度上的自由转动。
而过定位稳定机构由拖头万向节、万向节与尼龙滑块组成,在腰部扭动机构的基础上使主动腰部转动更加稳定。由于腰部扭动机构中万向节出于成本考虑,万向节精度不够高,使万向节在横滚方向上存在晃动量,该晃动量通过腰部扭动机构的放大后在腰部下方会严重影响主动腰部转动的稳定性与精确性。通过在腰部舵机间安装过定位稳定机构,增加额外的约束来消除扭动机构晃动量带来的问题,从而使机械猫腰部转动更加稳定、精确。
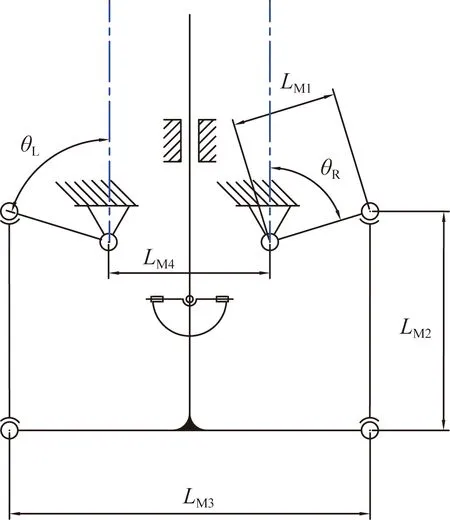
机械猫舵机曲柄的长度LM1为;鱼眼拉杆长度为LM2;后躯干前端宽度为LM3;两腰部舵机间距为LM4;舵机曲柄与左右腰部舵机向正前方 延伸的轴线所成角度分别为θL与θR图6 腰部机构运动简图Fig.6 Skeleton of mechanism of the waist structure
与传统的腰部或离散式脊柱结构相比较,该主动腰部在兼顾成本低廉的同时,结构简单且稳定可靠。主动腰部的扭动机构主要由腰部舵机、舵机曲柄与鱼眼拉杆组成,相较于齿轮传动腰部结构简单,零件精度要求较低且成本低廉;相比气动或电动推杆,该主动腰部体积更小适合于小体积四足机器人,此外主动腰部的躯干固定轴与拖头万向节可以分摊对腰部舵机的冲击,运动时的冲击抗冲击能力更好,有较好的运动稳定能力。
2.2 主动腰部的力学分析
分析机械猫主动腰部四连杆结构各连杆,根据图6的腰部机构运动简图,设主动腰部的航向角为θyaw,俯仰角为θpitch。通过在Matlab中对相关实验数据线性拟合,可得到θyaw与θpitch分别与θL和θR的关系式为
θyaw=-0.270 1θL+0.270 1θR
(9)
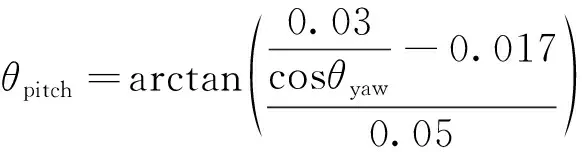
(10)
由此可以更为精准地控制主动腰部转动到目标位置。进一步可得到腰部舵机所受力矩MM,计算公式为
(11)
通过求解腰部舵机所受力矩,优化了舵机曲柄与鱼眼拉杆长度比例和材料选型。该主动腰部通过稳定高效的改变前后躯干相对位置,有效增大了足端可达空间,提升了机械猫的如越障等运动能力的上限。
3 实验
本文设计的机械猫总体机构设计图如图7(a)所示,实物图如图7(b)所示。为充分验证该仿猫柔性四足机器人相比传统刚性四足机器人的性能优势,基于第一节和第二节中设计的模型,对行进间质心波动和跳跃距离等参数进行了实验分析。

图7 机械猫总体结构设计图与实物图Fig.7 Mechanical cat overall structure design drawings and physical drawings
3.1 Trot步态行进
首先,腰部关节在航向方向上的规律扭动可以有效提升Trot步态下的运动步长,如图8所示。
在仿真实验过程中,通过在Adams中分别构建具有柔性腿部的机械猫和同等质量的刚性腿部四足机器人,利用摆线轨迹控制仿真模型运动,得到了图9中的质心波动曲线、膝关节力矩曲线和足端受力曲线。
从质心波动曲线中可以看出,采用刚性结构的测试模型的最大质心波动量为3.810 mm,采用柔性缓震腿的测试模型的最大质心波动量为2.927 mm。由此可见,柔性缓震腿的设计减小了Trot步态行进过程中的机身晃动,带来了明显的运动稳定性。从膝关节力矩变化曲线和足端受力曲线可看出,柔性结构的引入使膝关节最大力矩减小了46.06%,使足端最大受力减小了48.92%,该结果也证明了柔性缓震腿设计的有效性。
在实机验证中,受限于3D打印件装配精度和弹簧阻尼器刚度误差等因素,难以理想地将重心调整到对角足端连线交点处,但依旧可以得到近似仿真实验的结果。经调试,最终在18 cm的单步步长下实现了0.4 m/s的稳定高速行进,如图10所示。
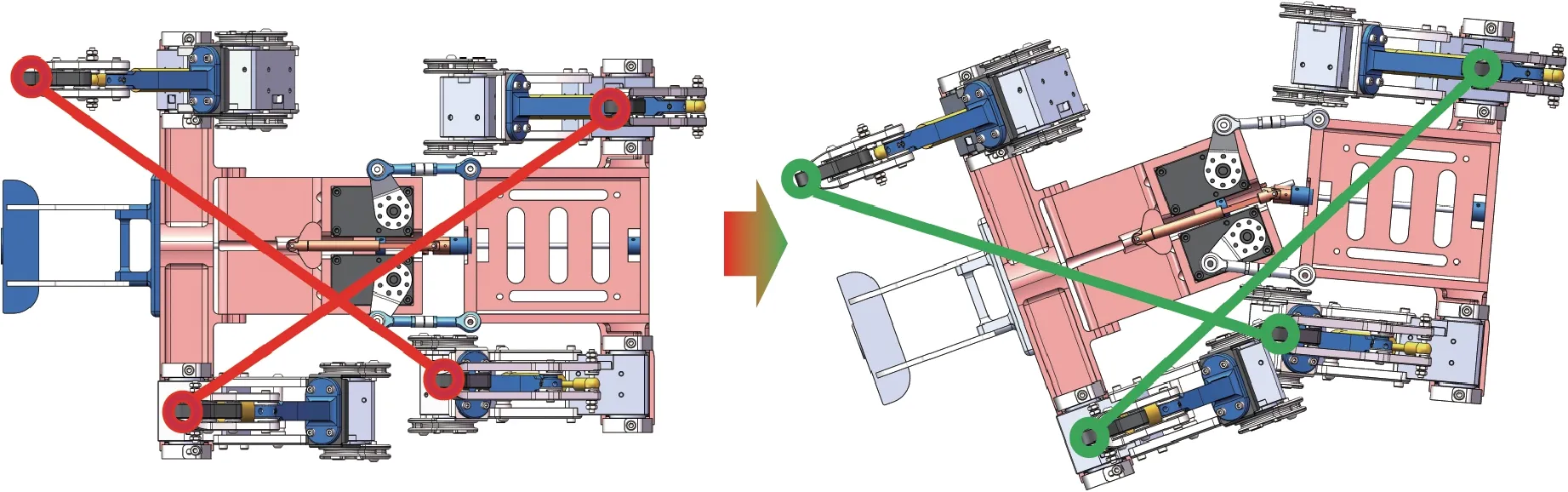
图8 Trot步态下腰部扭动示意图Fig.8 Schematic diagram of waist twisting with Trot gait
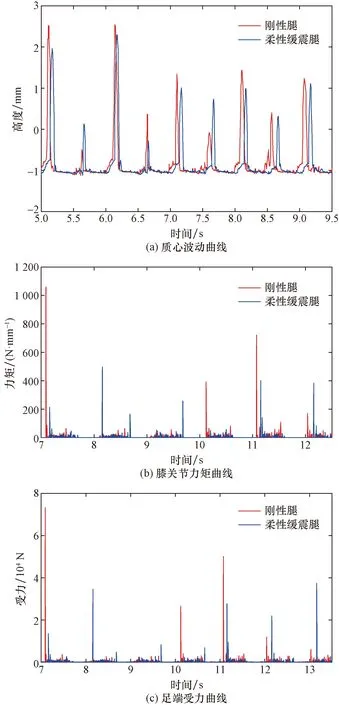
图9 Trot步态仿真实验结果Fig.9 Trot gait simulation experimental results
3.2 跳跃运动
经过在慢动作镜头下观察猫在跳跃过程中的姿态变化,确定了5个关键动作作为关键帧,再利用线性插帧得到最终运动轨迹,由此实现了跳跃动作的设计。
图11为采用刚性结构的测试模型和采用柔性缓震腿的测试模型的跳跃高度和跳跃距离仿真结果。从图11中可以看出,柔性缓震腿设计带来了10.24%的跳跃高度提升和35.28%的跳跃距离提升。
经过图12所示的实机验证,选用合适刚度的拉簧和压簧明显减少了跳跃落地时躯干受到的冲击。当采用空载转速为77 r/min和失速扭矩为3.0 N·m的Dynamixel XM430-W210舵机驱动时,可实现单次5 cm的跳跃高度或25 cm的跳跃距离。随着舵机转速的提升和扭矩的加大,跳跃效果也会有着明显提升。

图10 机械猫原型机Trot步态测试Fig.10 Trot gait test for mechanical cat prototype
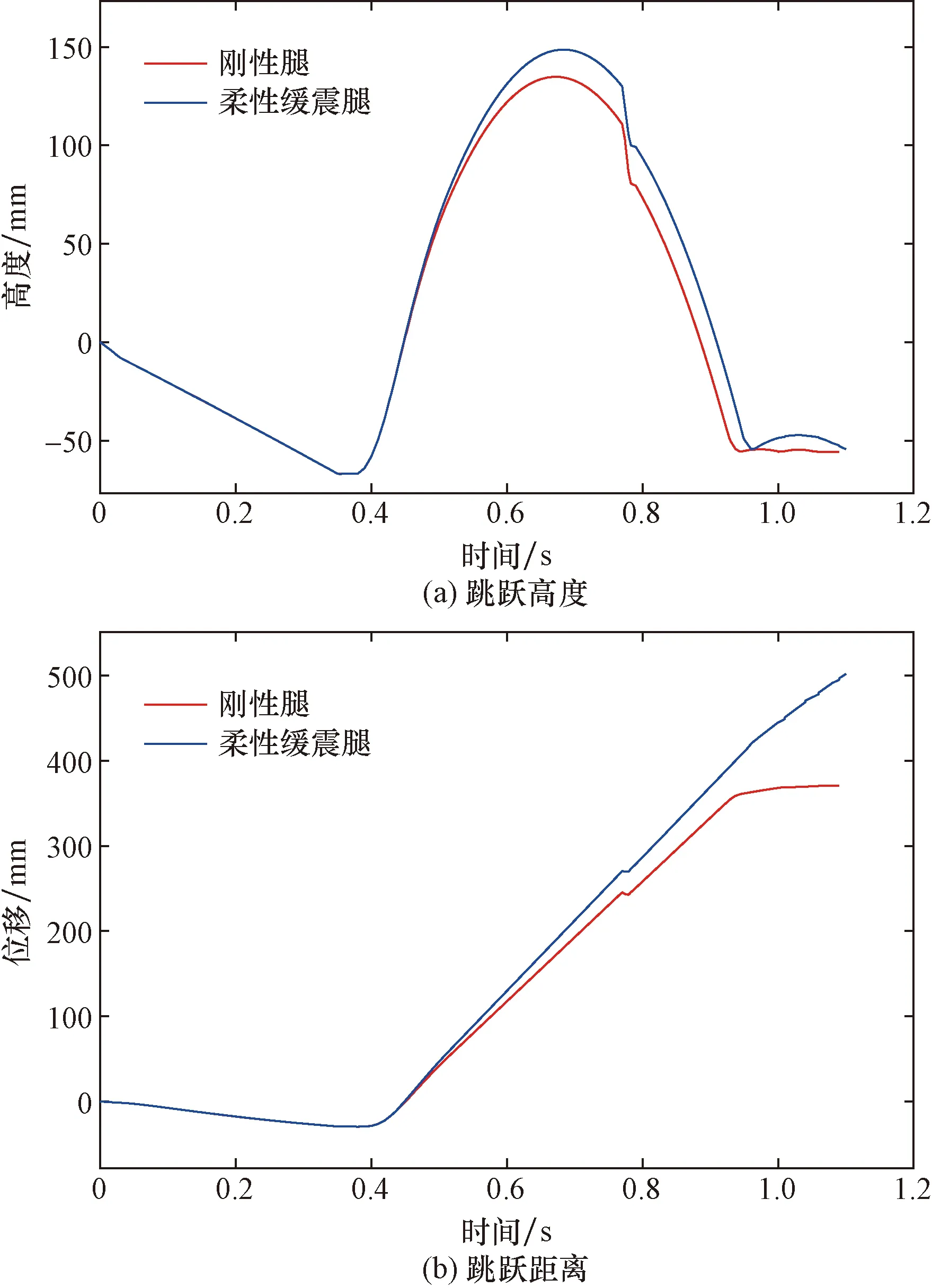
图11 跳跃仿真实验结果Fig.11 Jump simulation experiment results
3.3 落地缓冲
为了更直观地展现柔性结构的缓冲能力,通过将仿真模型对照组从同一高度摔落到地面,得到了图13所示膝关节受力的数据。
通过对机械猫原型机腿部舵机增加电流环控制,最终可实现最高35 cm跌落不翻倒。图14展示
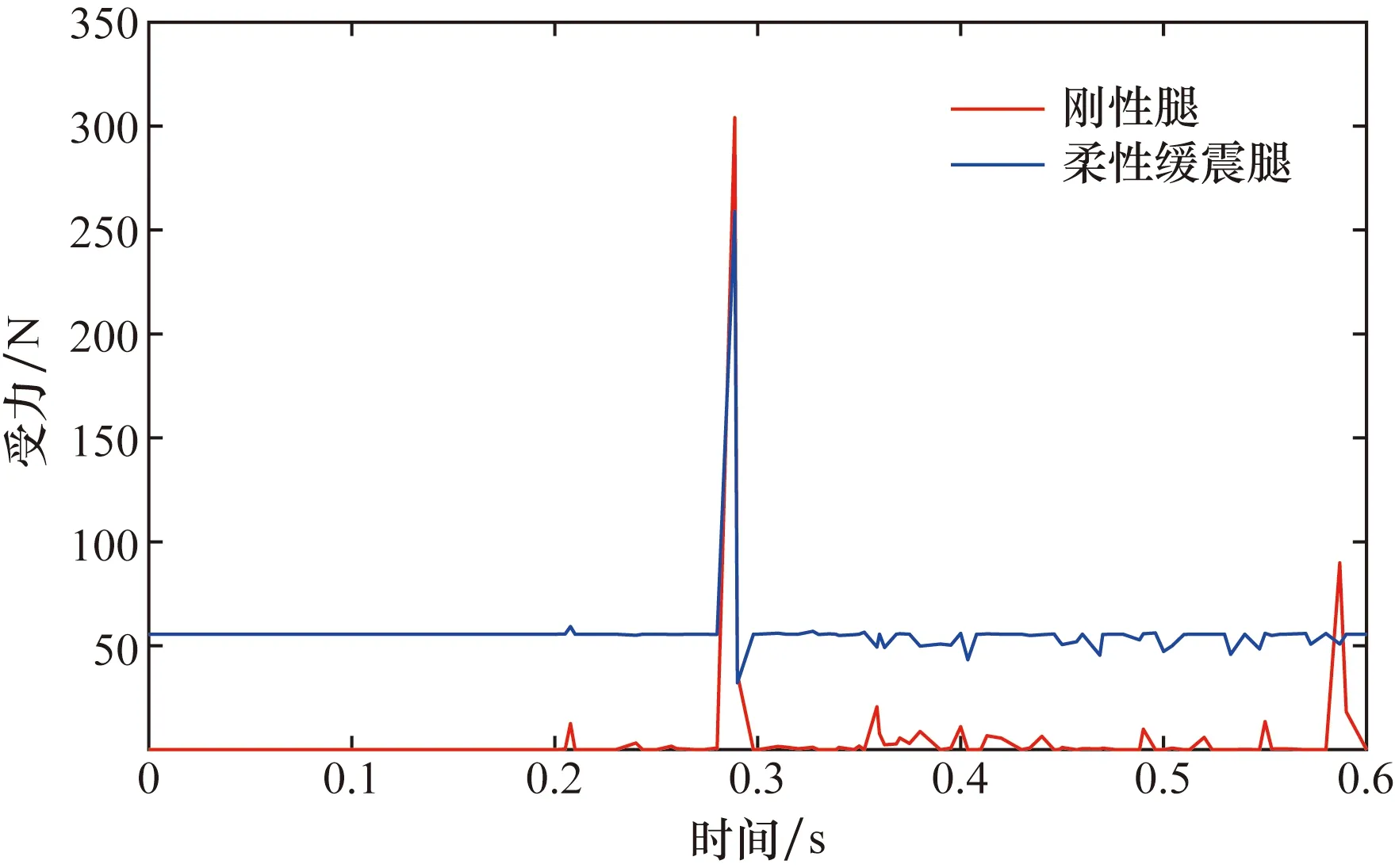
图13 落地缓冲仿真实验结果Fig.13 Results of simulation experiments on floor cushioning

图14 机械猫原型机落地缓冲测试Fig.14 Mechanical cat prototype landing cushion test
了从25 cm高度水平扔下过程中机械猫各阶段的姿态。
3.4 极限越障
主动腰部和前肘后膝的腿型设计带来了优秀的障碍物攀爬能力,使得该机械猫可以攀上大于最大步高的台阶。图15中机械猫原型机的最大步高为10 cm,实际可攀上15 cm的障碍物,提升了50%的攀爬高度。
4 结论
(1)针对大多数四足机器人采用刚性腿部结构和单关节腰部导致运动灵活性和缓震能力不足的问题,通过腿部结构仿生和腰部功能仿生,设计了一种基于柔性腿部与主动腰部的仿猫四足机器人。
(2)得益于腿部机构的缓震储能特性和腰部机构灵活稳定的运动能力,在相同仿真实验环境下得到了优于传统刚性结构模型的实验结果。结果表明该机构减少了机器人在各项运动过程中受到地面冲击力的影响,提升了机器人的运动稳定性;通过腰部扭动扩展足端可达空间,丰富了机器人运动姿态的多样性。
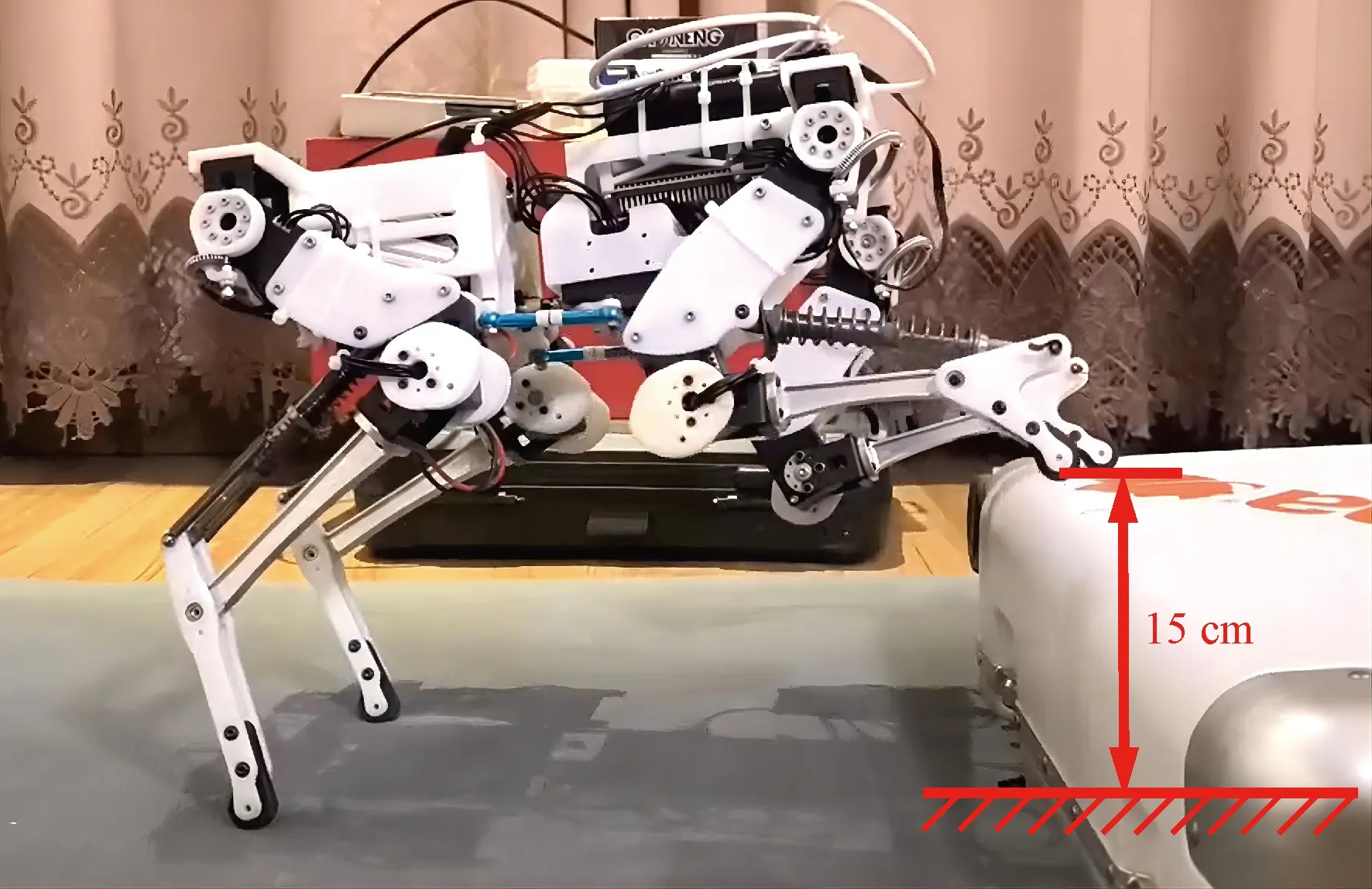
图15 机械猫原型机极限越障测试Fig.15 Mechanical cat prototype extreme barrier crossing test
(3)该四足机器人的原型机实现了预期功能,验证了仿真实验结果的正确性,进一步确认了柔性腿部和主动腰部在四足机器人机械结构设计中的合理性与可靠性。
