基于虚拟中心点的水平位移监测算法研究与应用
2023-12-02王甫强,余斌
王 甫 强,余 斌
(武汉市勘察设计有限公司,湖北 武汉 430022)
0 引 言
近年来,随着城市建设的迅猛发展和建筑工艺水平的不断提高,超大型和高层建筑越来越普遍,建筑基坑也朝着更深、更大的方向发展。同时城市建筑施工周边环境日益复杂,为保护基坑施工安全,维护基坑自身结构及周边环境稳定,基坑监测的重要性也日益凸显[1-2]。随着技术进步,成本的降低,全站仪自动化监测技术应用得到了长足的发展,可以把监测人员从长期、连续、重复性的繁杂体力劳动和不安全的工作环境中解放出来,而且自动化监测可以克服常规监测方法涉及设备多、布点要求高、所需观测人员多及监测成本大等弊端。相对于传统人工监测方法的低效、监测时间长、监测结果反馈慢等缺点,基于全站仪自动化的基坑变形监测可以实现全天候、动态监测,更利于信息化施工,确保基坑支护结构和周边环境的安全[3]。随着施工技术的不断升级和施工工艺复杂程度的不断提升,基坑监测亟待从传统人工监测方式过渡到实时性高、观测连续性强的自动化监测方式。
在以往基坑人工监测中,基坑支护结构顶部水平位移一般采用全站仪人工搬站的形式利用小角法[4]、视准线[5]等方法对基坑各条边线进行水平位移监测。这些方法虽可以准确测量出每条基坑边线上的监测点水平位移值,但是需人为多次搬站测量、作业流程繁琐,不适用于基坑自动化监测。在矩形基坑中(如管廊基坑、地铁车站基坑等),也常采用极坐标法利用监测点坐标分量来计算水平位移变化量[6-7],极坐标法的优点是计算简便,但多适用于形状规则的基坑,当测站坐标轴方向与基坑边线不平行时便不能直接将监测点坐标结果代入计算。基坑自动化监测设备类型可大致分为两类:一类是使用以GNSS[8]和光纤光栅传感器[9]为代表的自动化监测传感器配合自动化数据采集及处理平台[10]的监测作业模式,GNSS的应用使得全天候的连续监测成为可能,光纤光栅传感器则将传统的对离散监测点监测提升为连续、线状的监测模式;另一类是采用自动化全站仪的传统测量模式,一般采用建立平面控制网,设置强制对中观测墩的方式,利用高精度全站仪后方交会解算出架站点坐标,再利用极坐标法对基坑支护结构顶部水平位移进行自动化监测[11-13]。此时由于架站点固定,设置的观测零方向很难再满足与基坑(特别是形状不规则的基坑)每条边线都正交,曲政利用基坑边线拐角点建立虚拟断面[14],将测点位移值归算到垂直于基坑边线方向上得到准确水平位移量,但此方法无法解决弧线段上的测点位移值计算。本文针对上述问题,提出了一种基于虚拟中心点的水平位移自动化监测算法并应用于自研的综合智能监测云平台系统中,以期得到基坑各条边线上准确的水平位移量。
1 全站仪自由设站法原理
近年来全站仪自由设站法广泛应用于变形监测中,其本质是边角后方交会测量[15],即通过在未知设站点上观测多个稳定的已知点,利用角度距离观测值反算出设站点坐标,再对监测点进行测量。受限于基坑现场观测条件,基坑水平位移的工作基点一般只能布设在基坑变形影响区内,因此只有通过在施工影响区外布设稳定基准点,并观测工作基点和至少两个稳定基准点之间的距离和角度来快速解算工作基点坐标,从而实施变形监测工作[16]。
如图1所示,假设全站仪架设在基坑周边较为稳固的P点,通过测量P点与基坑变形影响区外的基准点HS1(xHS1,yHS1)和HS2(xHS2,yHS2)之间的方向观测值α1,α2和水平距离观测值D1,D2,即可解算出测站点坐标P(xP,yP)。

图1 自由设站法示意Fig.1 Sketch of free station method
利用测站点与基准点间的角度和距离观测值进行边角平差[17],可得以下误差方程:
(1)
式(1)用矩阵形式可表示为V=AX-L,其中:
(2)
设方向观测值中误差为m0,距离观测值中误差为ms=±(a+bS),其中a为全站仪测距固定误差,b为测距比例误差,S为水平观测距离。
令方向观测值的权为1,则距离观测值的权可表示为[18]
(3)
由最小二乘平差可得X=(ATPA)-1ATPL=QATPL,令
(4)
式中:QXX为坐标改正数协因数阵;P为权阵。则自由设站点点位中误差可表示为
(5)

2 水平位移监测点点位精度
确定设站点坐标后,利用极坐标法对各个水平位移监测点进行逐个测量,假设某监测点的观测值为水平方向的方位角α,铅垂面内的天顶距为V,斜距为S,则该点坐标的计算公式为
(6)
通常情况下,全站仪水平角与天顶距的观测精度视为相同,即mV=mα,同时忽略起算点误差,则根据误差传播定律监测点点位误差为[19]
(7)
在实际监测工作中,基准点和监测点都采用强制对中棱镜,同时采用固定观测墩架设全站仪,因此不需要考虑架站点和监测点的对中误差。故监测点的点位中误差来源于架站点点位中误差mP以及监测点点位中误差m,根据误差传播定律,可得任一监测点X点位中误差:
(8)
3 水平位移值计算方法
测得水平位移监测点坐标值之后,即可进行位移值的计算,当基坑边线与测站设置的坐标轴平行或正交时,可根据监测点相邻两次坐标结果的坐标分量的差值来表示各监测点位移量,而对于形状不规则基坑,特别是对于含有圆弧段边线的基坑,此种算法便不再适用。本文针对此种情况,提出一种基于虚拟中心点的水平位移计算算法,其计算流程如图2所示。
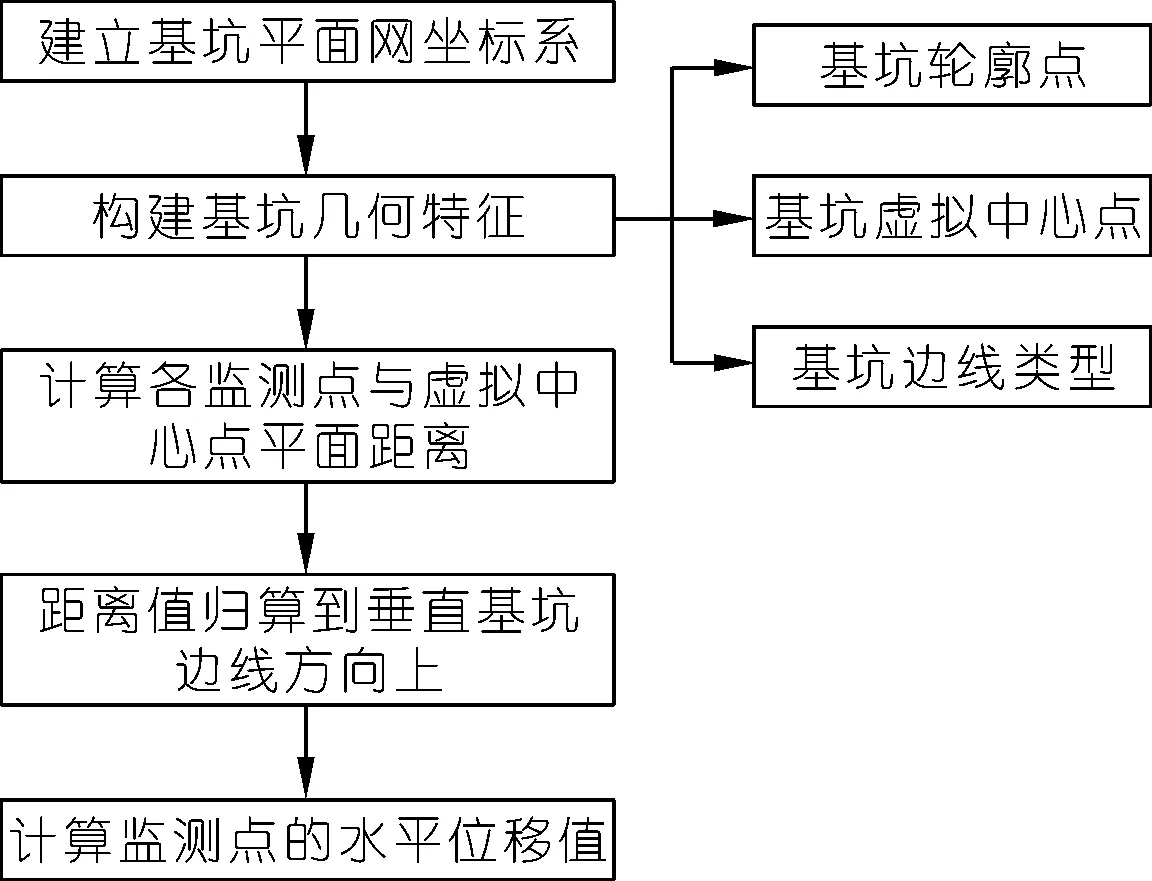
图2 基于虚似中心点的水平位移计算流程Fig.2 Calculation of horizontal displacemere based on virtual center point
(1) 根据后视基准点的坐标,建立基坑平面坐标系,通过后方交会计算出固定架站点JZ的坐标(xP,yP)。
(2) 利用全站仪对基坑虚拟中心点、基坑边线轮廓点、水平位移监测点进行观测(见图3),具体做法是采集基坑轮廓点LK1,LK2,…,LKn(规定从基坑西北角起按顺时针编号)的平面坐标值,同时根据基坑实际形状在基坑内部适当位置设置一个或多个基坑虚拟中心点并记录其坐标,记作Oi(xOi,yOi)(i=1,2,3,…),虚拟中心点的设置将复杂形状的基坑切分为了若干个形状较为规则的区域。以上各轮廓点和虚拟中心点坐标确定了基坑在项目监测坐标系中的几何形状。测得各点坐标后,根据测点布设及基坑形状对水平位移监测点进行归类,如图3中的布点情况可归类如表1所列。
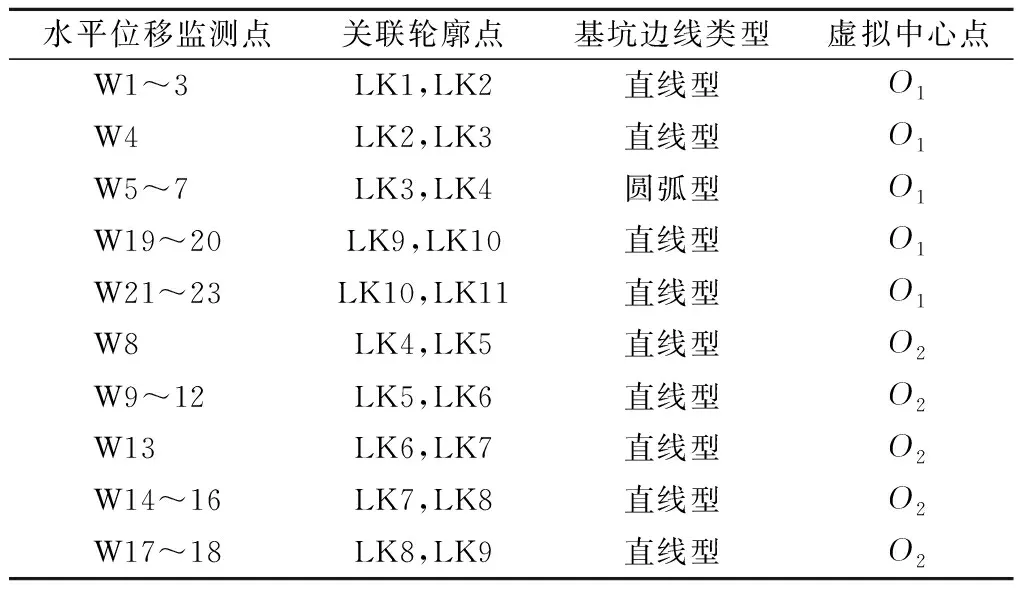
表1 监测点归类情况Tab.1 Classification of monitoring points

图3 基坑监测点分布情况Fig.3 Distribution of foundation pit monitoring points
(3) 计算各监测点到其对应中心点的平面距离Di:
(9)
式中:(xi,yi)为水平位移监测点的平面坐标,(xO,yO)为其对应虚拟中线点的平面坐标。
(4) 根据表1,将上一步计算得到的平面距离归算到垂直基坑边线方向上,此时根据基坑边线的类型不同可分以下两种情况:
当监测点所属的基坑边线类型为“直线型”时(以图3中W10为例),水平位移监测点W10(x10,y10)所在基坑边由LK5,LK6构成,由两端点平面坐标可得此基坑边线直线方程为
(10)
而点W10与其对应的虚拟中心点O2之间的距离D10及其组成的直线方程可表示为
(11)
(12)
则点W10与虚拟中心点O2之间在垂直于基坑边线lLK5-6方向上的距离d10可表示为
d10=D10·sinα10
(13)
当监测点所属的基坑边线类型为“圆弧型”时(以图3中W6为例),由于W6所在基坑边线为圆弧形,其与虚拟中心点O1之间在垂直于基坑边线上的距离即为两点之间的水平距离,可表示为
(14)
(5) 基坑水平位移监测点的水平位移变化量即为相邻两次水平位移值的差值,即Δd=(d)n-(d)n-1,其中(d)n表示第n次观测测得的水平位移值。
此算法在步骤(4)中计算得到的距离值本质上代表了水平位移监测点相对于基坑中心的距离,因此很自然地,当某一监测点的水平位移距离值变小时,代表着该点靠近基坑中心,也即向坑内方向变形,反之则向坑外变形。事实上,由于基坑水平位移点在基坑开挖期间坑外土压力的作用下主要产生垂直于基坑边线方向上的变形,即式(13)中的角度变化很小(可认为不变),因此以点W10为例,判断d10的大小等同于判断D10的大小,即通过计算监测点到虚拟中心点的平面距离便可快速判别监测点是向坑内还是坑外移动。
4 工程应用
4.1 项目概况
以武汉市一中学改扩建项目深基坑为例,该基坑占地面积约19 000 m2,基坑周长约560 m,基坑开挖最大深度13.2 m,基坑设计安全等级为一级。根据勘察报告资料,该项目场地岩土层由上而下主要为杂填土、全新统冲积粉质黏土、淤泥质粉质黏土、粉细砂、中粗砂夹砾卵石、残积黏土、白垩至第三系(K-E)含砾砂岩、泥质粉砂岩。地下水可分为两类:上层滞水和砂层中的承压水。上层滞水赋存于杂填土中,该层结构松散不均,透水性好,富水性较差,主要接受大气降水、地表水及生活废水补给,勘察期间测得钻孔上层滞水水位埋深0.9~3.0 m(绝对标高18.29~21.90 m),第四系孔隙承压水赋存于第四系全新统冲积(Q4al)成因的砂层中,与长江存在水力联系,水位埋深3.0 m(绝对标高18.3 m)。
基坑采用“放坡挂网喷混凝土”以及“混凝土灌注排桩+支撑+桩顶放坡减载,混凝土灌注排桩+被动区加固+桩顶放坡减载,悬臂桩”联合支护方式。基坑形状不规则且包含一段圆弧形边线,基坑形状及监测点布设如图3所示。基坑西侧与南侧临规划居住小区,基坑东侧临市政道路,基坑开挖对周边环境有较大影响,因此在基坑开挖期间需密切关注基坑支护结构的形变特别是垂直基坑边线方向上的水平形变。
4.2 自由设站精度分析
基坑监测过程中,在工作基点JZ设置强制观测墩并架设徕卡TM50型全站仪,测角精度±0.5″,测距精度±(0.6 mm+D×10-6),在远离基坑施工影响范围变形区外的建筑物上设置4个后视点作为基坑监测平面控制网的起算点,水平位移监测点使用徕卡棱镜设置在支护桩桩顶冠梁处,沿基坑每条边线每20 m左右布设一个监测点。观测时依次对4个后视点进行观测,利用后视点坐标经后方交会解算出架站点坐标,表2为后视点的平面坐标及测得的角度距离值。通过后方交会计算得到架站点JZ的坐标值为(146.136 6,-2 063.882 5)。
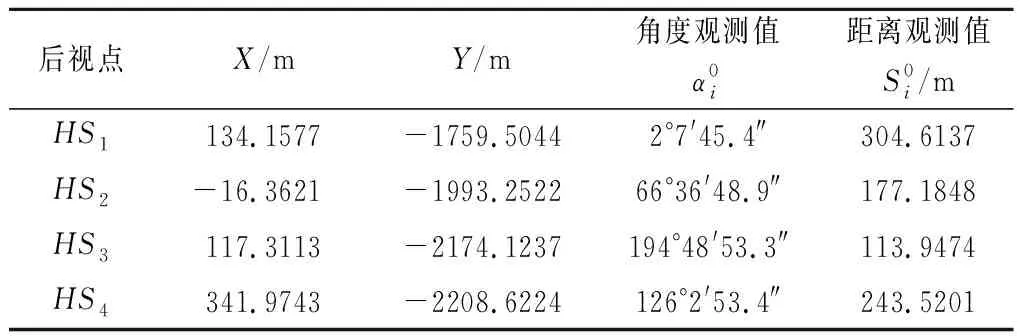
表2 自由设站法观测值Tab.2 Observation values of free station method
取方向观测值的权重为1,由式(1)及最小二乘原理计算可得误差方程的系数矩阵及权阵为
(15)
由公式(4)可算得坐标改正数协因数阵为
(16)
则根据式(5)可得自由设站点点位中误差mP=0.96 mm,取基坑观测边长最大值为200 m,则测距中误差mS=±0.80 mm,根据式(8)可得监测点的点位中误差mX=±1.25 mm,能够满足基坑观测点点位中误差不大于±1.5 mm的监测规范要求[20]。
4.3 水平位移值计算
后方交会测量完成后,测得基坑的各轮廓点及选定的虚拟中心点平面坐标结果如表3所列。
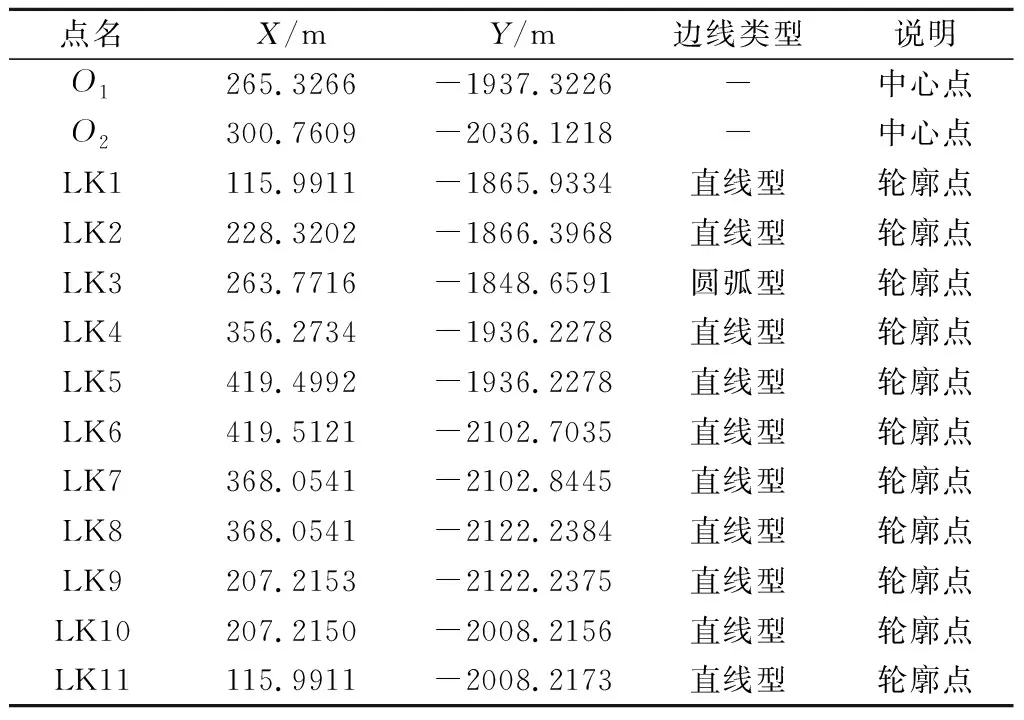
表3 基坑几何特征点Tab.3 Geometric feature points of foundation pit
基坑开挖期间,基坑桩顶水平位移同时采用传统的极坐标法(采用两种结果:一种为直接取监测点X/Y坐标分量;另一种为将监测点坐标归算到各基坑边的垂直方向上)与本文提出的算法进行计算,并用观测精度较高、数据质量较好的视准线法加以检核,以监测点W4,W6,W9,W10为例,选取了基坑开挖直至回填期间的20期数据进行计算,算得的结果如图4所示(图中纵坐标正值表示监测点向基坑内部变形,负值表示监测点向基坑外部变形)。从图中数据可看出:

图4 监测点变形曲线Fig.4 Deformation curves of monitoring points
(1) 4种算法所反映的测点变化趋势整体上大致相同,在较长监测周期上均能反应监测点的变形趋势。
(2) 从图上可看出仅采用测点X/Y坐标分量的监测结果明显与其他算法有着一定的偏差,本文提出的算法在数值上与视准线法的计算结果吻合度更高,两者最大偏差不大于0.4 mm,假定视准线法的结果为真值,两者偏差率不超过15%,而采用测点X/Y坐标分量,偏差率最高可达65%。
(3) 从图4中3块虚线部分可看出在局部的变形趋势上,采用测点X/Y坐标分量所反映的变形趋势与其他3种算法表现的变形趋势存在明显差异,说明只采用监测点单个方向上的坐标分量不能准确体现其在垂直于基坑边线方向上的变形情况,某些情况下会对监测点的变形情况造成误判。
(4) 由图4(b)显示的结果可知,利用极坐标法在计算弧线段上监测点的水平位移值时,相对于本文提出的算法与视准线法的偏差值明显变大,极坐标X/Y分量法偏差值更大,说明选用极坐标法需要结合基坑形状,确定其适用性。
综上所述,本文所提算法与视准线法的计算结果有较高的吻合度,在变形趋势和变化数值上均能准确反应水平位移监测点的实际变形情况,同时可以适应不同形状的基坑。
根据现场实际情况,选取具有代表性的6组监测点从2021年8月23日至2021年12月21日的108期数据进行分析,具体变形情况如图5所示。由图5可知,监测点水平位移累计变化量基本为正值,表明随着基坑开挖深度的不断增加,基坑内的土体大范围卸除,桩顶水平位移监测点在水、土体主动土压力作用下,不断向坑内位移。2021年10月底板开始施工,至此监测点变化趋势趋于缓和,基坑回填阶段监测点已无明显变形,基坑桩顶变形情况趋于稳定。
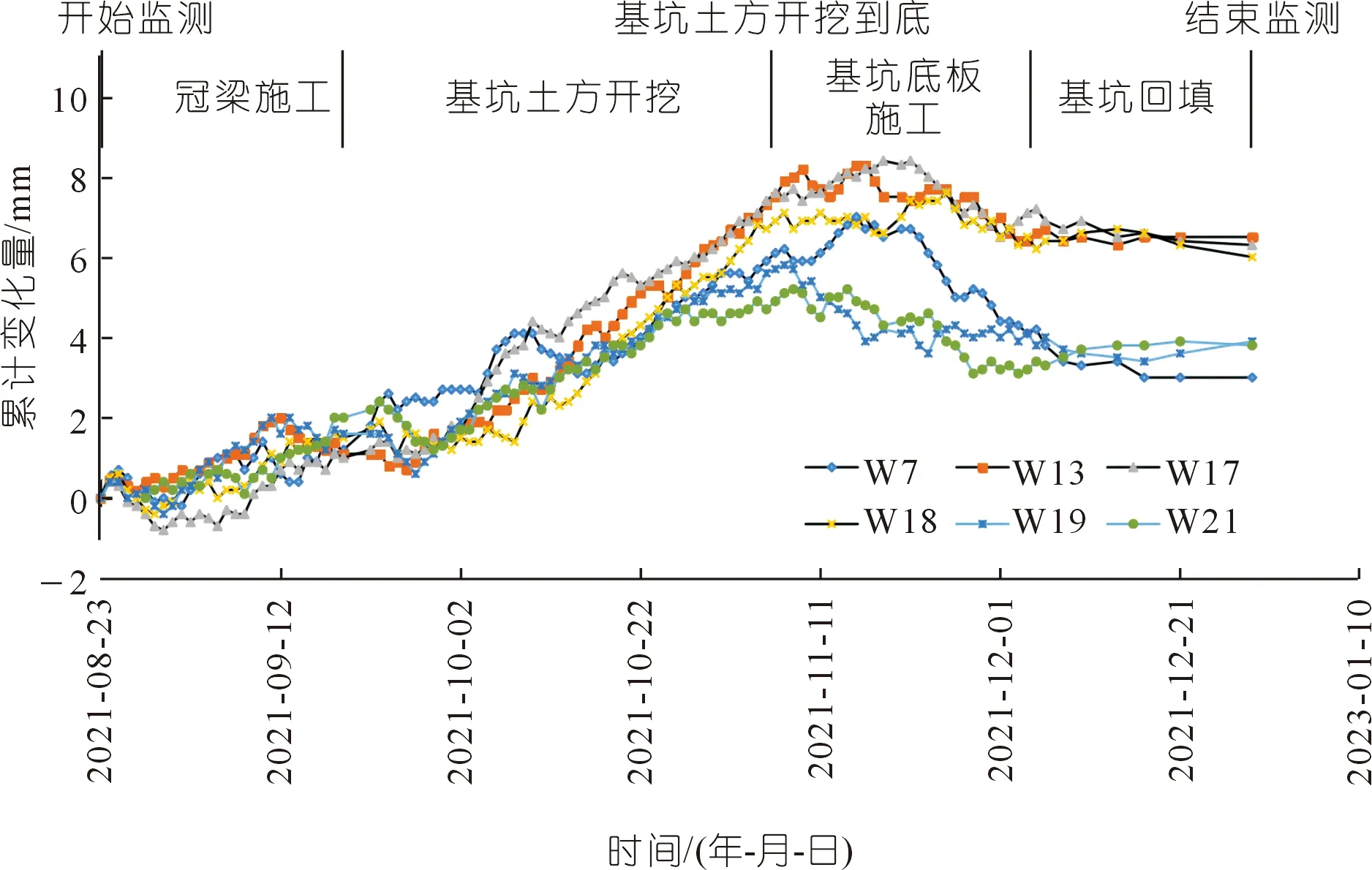
图5 桩顶水平位移典型曲线Fig.5 Typical curves of horizontal displacement of pile top
5 结 论
本文在考虑基坑外边线轮廓的基础上引入了基坑虚拟中心点,提出了一种适用于固定架站式全站仪基坑自动化监测的水平位移监测算法,该算法具有计算效率高、水平位移变形值计算准确等优点,并将其应用在武汉市一中学改扩建项目基坑监测中,同时采用视准线法和极坐标法对其精度进行验证,得到如下结论:
(1) 本文提出的水平位移计算方法从原理上来说属于全站仪自由设站法,但在水平位移值计算上考虑了基坑本身的轮廓形状,能够准确计算出监测点在垂直于基坑边线方向上的位移量。在此基础上引入的虚拟中心点则起到了辅助计算的作用,此外通过对水平位移值表达式分析发现,通过计算监测点到虚拟中心点的平面距离便可快速判别监测点的变形方向。
(2) 当基坑边线为弧形时,通过选取弧线段圆心点作为虚拟中心点,则监测点到圆心点的距离的变化量即为监测点相对于弧形边线的水平位移变化量,无需再归算到基坑边线垂直方向上,既避免了复杂的计算过程,又能准确表示监测点在垂直于弧线段方向上的位移。
(3) 通过实测数据表明,本文提出的基于虚拟中心点水平位移计算方法与常用的高精度视准线法的观测精度相当,两者偏差率不超过15%,能准确反应水平位移监测点的实际变形情况。
