基于多尺度数学模型的波束角效应改正方法
2023-12-02胥洪川,周威,孙振勇,马耀昌,郑亚慧
胥 洪 川,周 威,孙 振 勇,马 耀 昌,郑 亚 慧
(1.长江水利委员会水文局 长江上游水文水资源勘测局,重庆 400021; 2.长江水利委员会 水文局,湖北 武汉 430010)
0 引 言
单波束测深系统由单(双)频单波束测深仪、GNSS定位导航系统、测深导航软件以及测船载体构成,具备操作简便、成本低廉等特性,是目前水下测量最主要的技术手段。声学回波的形态由换能器的结构决定,在目前单波束测深技术中,测深仪换能器均是以一定开角的波束发射声波,这就使得声学信号是以“锥形”的方式发射至水底。因此,测深仪换能器收到并记录的信号触发点为“锥形”水底区域内至换能器的最短距离,这就是测深波束角效应。
水底地形复杂,往往“锥形”下水底区域内至换能器的最短距离并不是测量时的实际水深,从而造成地形变形失真。目前,大量的学者针对波束角效应失真规律及改正方法作了深入研究。在测深仪计算机模拟方向,徐晓晗[1]应用微分几何的原理对不同类型海底的波束角效应空间结构进行建模仿真,建立失真模型;邹永刚等[2]利用Matlab语言设计模拟测深仪工作机制,验证波束角效应测深原理;毕彦等[3]针对单波束测深仪波束角的设计影响因素进行了归纳和分析,对不同波束角情况进行仿真试验。在原理研究方向,刘雁春[4]、徐晓晗[5]、周志宏等[6]将波束角效应按表现形式分类(倾斜、凹形、凸形),并提出了相应的改正方法、改进模型;邹永刚等[7]对海底地形中凸形海底的改正方法作进一步补充说明;邹永刚[8]、肖付民[9]等基于测线方向、海底倾斜角等研究,提出了一些可行的算法;崔晓东等[10]基于这些特性,提出一种针对复杂海底地形的自动改正方法。在姿态改正方向,徐晓晗等[11]论证波浪效应和波束角效应耦合下空间形态与数学描述,推导改正模型。测深实践中,吴敬文等[12]采用波束角3°、8°的单波束测深仪进行姿态耦合试验分析,用来提高复杂水域水深测量精度问题。在此基础上,吴敬文等[13]就波束角效应与测船姿态(Roll、Pitch)耦合的作用效应提出了相应的改进算法;于家城等[14]就多波束系统工作原理进行多波束波束角效应改正实验,提升测深成果精度。这些学者都提出了较为完善的理论方法,但是这些理论都是波束角效应二维平面下的失真规律,而对于水下地形三维空间下坡度、坡向的探讨较少。真实的地形错综复杂,测线方向并不能完全代表坡度方向。实际生产中,波束角效应带来的测深误差常被忽略。
本文通过对波束角数学改正模型进行展开分析,提出一种基于多尺度数学模型的单波束测深波束角效应改正方法。多尺度数学模型是以水下测点多尺度因子的位置、坡度、坡向、水深、半波束角以及波束角效应的空间表现形态建立的一种波束角效应数学改正模型。该方法利用Horn算法拟合改正模型关键尺度水下地形点的坡度、坡向,基于多尺度因子波束角数学改正模型,实现对复杂水域下单波束测深由于波束角效应引起的地形失真的改正。经过试验定性定量分析,波束角效应带来的误差得到改善,测深精度得到一定程度的提高。
1 波束角效应的失真规律
单波束测深仪发射的测深信号受到波束角效应的影响,使得记录的测深回波图像失真,测深软件读取的水深值与真实的水深值存在偏差[15-16],进而影响测深精度。基于以测深仪换能器“锥形”方式发射的特性,测深仪换能器接收的信号可类比于一个个“脚印”的信号,水底地形的坡度决定了“脚印”的复杂程度[17],水深决定了“脚印”的大小,而换能器波束开角的大小决定了“脚印”的分辨率。因此,波束角效应的影响是由水底地形的坡度、水深以及测深仪换能器自身的波束开角大小共同决定的,水底地形的坡度越大、水深越深、测深仪换能器的波束开角越大,对测深精度影响越大。波束角效应造成水下地形测量精度降低,使得水下地形与实际地形相比趋向平坦。
在二维空间下,人们常常把水下测点按断面形态分为倾斜、凹形、凸形3种断面形态点。倾斜断面形态点是最普遍的一种水下断面类型点,它表示地形趋势方向一致的状态。凹形断面形态点、凸形断面形态点正好位于水底形态趋势变化的过渡处,从形态上看凹形断面形态点为该小范围内的最深点,凸形断面形态点为该小范围内的最浅点。波束角效应失真规律表现为:倾斜断面形态点存在一定的时移特征;凸形断面形态点凸点没有失真,凸部回波变宽被拉长,呈现一定的双曲线增伪特征;凹形断面形态点凹部回波变窄,凹点的失真最大且部分凹部没有真实回波,凹形断面形态点最深处深度丢失。
在三维空间中,由于波束角效应所涉及的变化因素较多,对于它影响的研究趋于复杂。测深仪换能器最早接收到的信号极可能是“脚印”里最浅的信号,而该点的三维特征可由该点的坡度、坡向以及水深来概括。
2 波束角效应的数学模型
本文基于三维空间中单波束测深波束角效应测深仪换能器波束“锥形”发射的形态、水下地形三维空间形态,建立如图1所示基于多尺度因子波束角效应数学模型。图1中,测深仪坐标为O1(X1,Y1),h为仪测水深值,θ为测深仪波束角大小,δ为O1点在水底地形坡度,β为O1点在水底的坡向方位角。
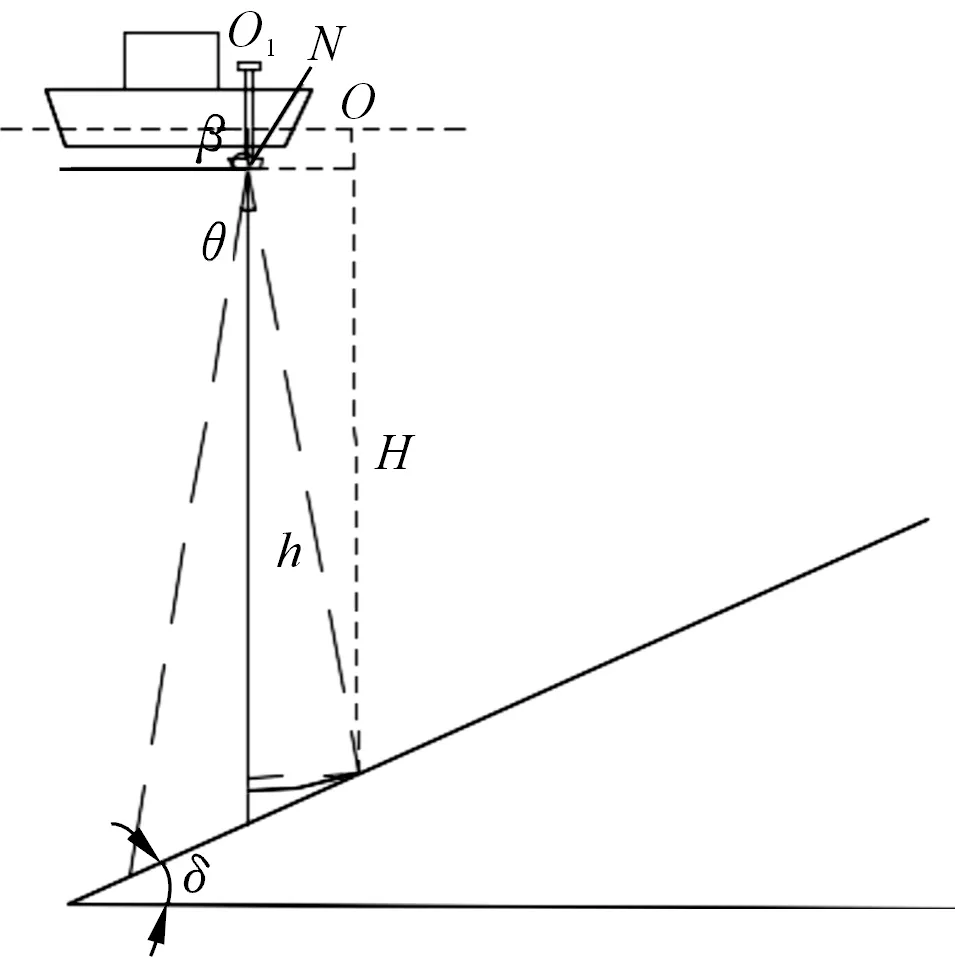
图1 基于多尺度因子的波束角效应数学模型Fig.1 Mathematical model of beam angle effect based on multi-scale factor
由于波束角效应的影响与测深仪波束开角大小、水底地形坡度密切相关,为得到严密的数学改正模型,按以下两种情况进行讨论。
(1)
则O(X,Y,H)点的公式推导为
(2)
(3)
则O(X,Y,H)点的公式推导为
(4)
3 基于规则格网的坡度、坡向计算
坡度是地表位置上高度变化率的量度,用百分数或者度数表示。坡向是斜坡上最陡下坡倾斜程度上方向的量度,从正北为0°开始,顺时针移动,与坐标方位角方向相同,单位为度。
3.1 Ritter算法
Ritter算法空间示意如图2所示。
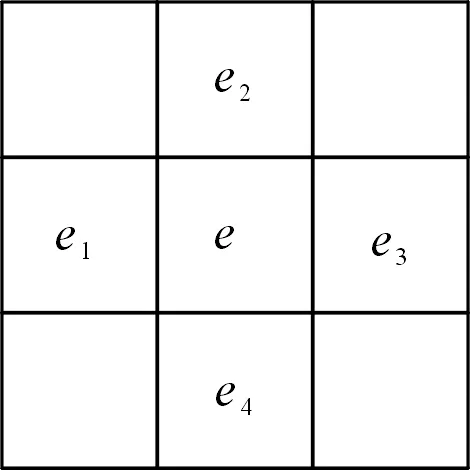
图2 Ritter算法空间示意Fig.2 Space diagram of Ritter algorithm
Ritter算法采用与中心像元直接邻接的4个像元,估算中心像元的坡度与坡向。中心点e的坡度:
(5)
中心点e的坡向:
(6)
式中:ei表示相邻单元值,d代表单元大小,(e1-e3)表示x方向的高差,(e4-e2)表示y方向的高差。
3.2 Horn算法
Horn算法空间示意如图3所示。Horn算法采用使用8个邻接像元,4个直接相邻像元的权重取2,4个对角像元权重取1。则中心点e的坡度:
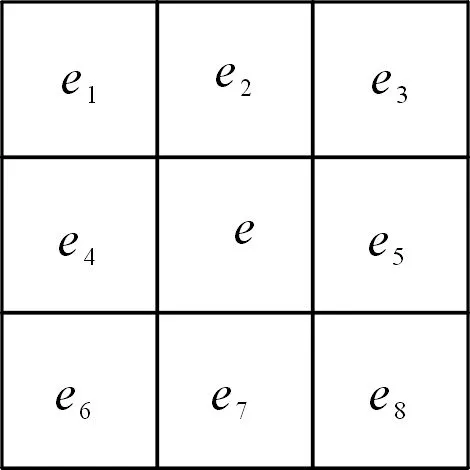
图3 Horn算法空间示意Fig.3 Space diagram of Horn algorithm
Se={[(e1+2e4+e6)-(e3+2e5+e8)]2+

(7)
中心点e的坡向:
(8)
式中:ei表示相邻单元值,d代表单元大小,(e1+2e4+e6)-(e3+2e5+e8)表示x方向的高差,(e6+2e7+e8)-(e1+2e2+e3)表示y方向的高差。与Ritter算法相比,Horn算法加权考虑了4个对角方向对中心点e坡度坡向的影响,这样计算的坡度、坡向也更为准确合理。本方法坡度、坡向计算采用Horn算法计算。
4 试验分析
试验区域为金沙江乌东德库区白马口-龙街河段,乌东德库区地跨云南、四川两省,试验区众多高山深谷相间并列,地形较为复杂,测区地表植被稀疏,地表覆盖物主要为砂石、稀疏荒草地。该河段2020年库区蓄水前为陆上地形,采用了机载激光LiDAR 获取全域高精度点云数据;蓄水后原陆上地形已被淹没,采用单波束测量复测水下地形,复测单波束水下地形与机载LiDAR地形重叠区。因机载LiDAR测量精度远高于单波束测深精度,本文试验以机载LiDAR点云数据为基准,对重叠区域改正前、后的单波束数据进行对比分析。试验区平面基准采用CGCS2000坐标系,高程基准采用1956年黄海高程系,高斯3°带投影,中央子午线102°。水下复测仪器设备为ODOM DF3200 MKⅢ(波束角4°)双频测深仪、天宝 R10 GNSS、Hypack测深导航软件及专用测量船一艘。为保证数据的准确性,测前仪器均经过严格比对和校准,性能稳定。
4.1 试验区坡度、坡向分析
基于试验区水下测量数据建立规则格网DEM模型,格网大小d为0.1 m(见图4)。
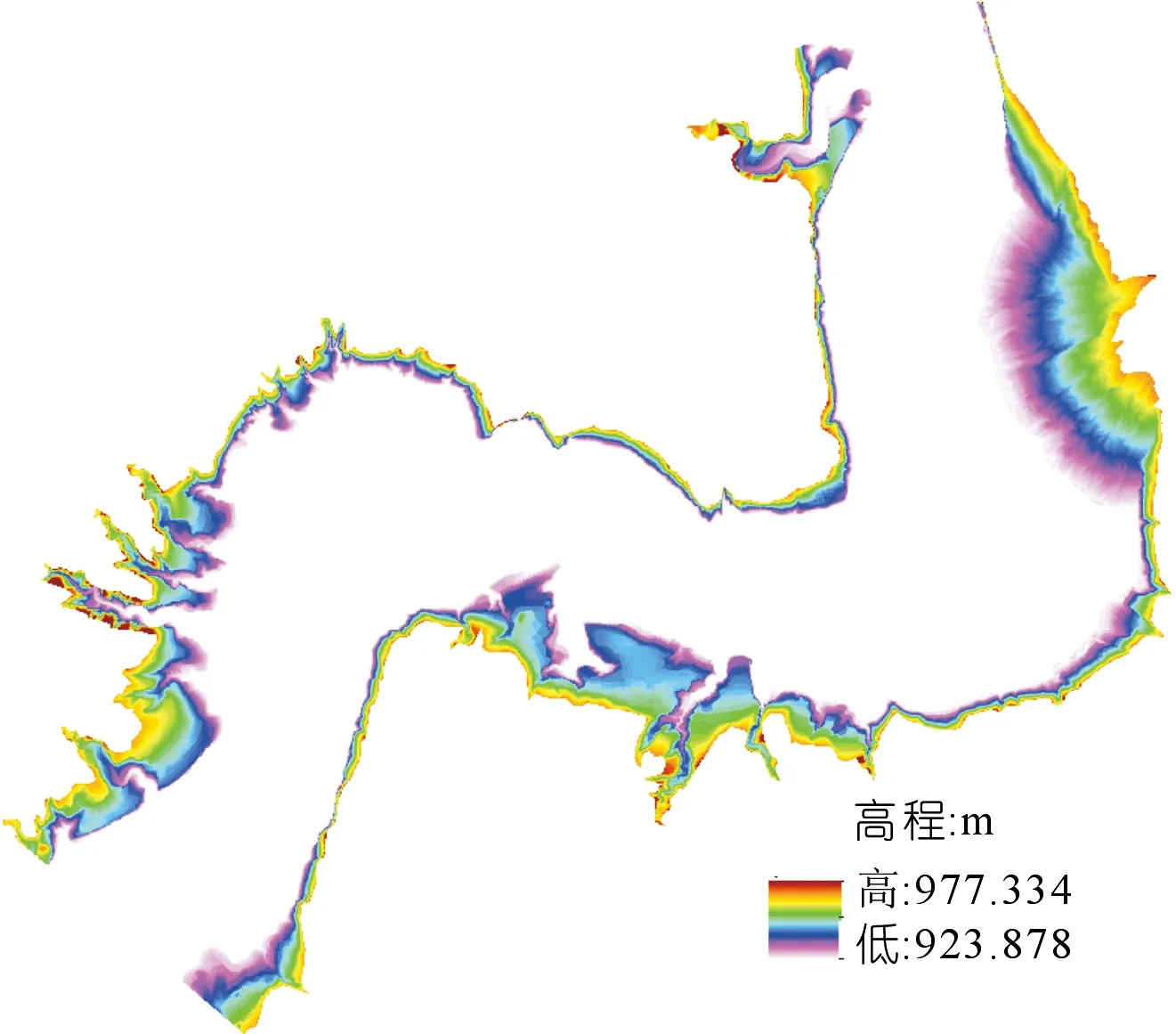
图4 试验区DEM模型Fig.4 DEM model of the test area
试验区规则格网DEM模型基于Horn算法得到试验区坡度分布图(见图5)。该河段属于山区型河道,两岸陡坡众多,最大坡度倾角甚至接近90°。根据波束角效应将严重影响水下测深精度。
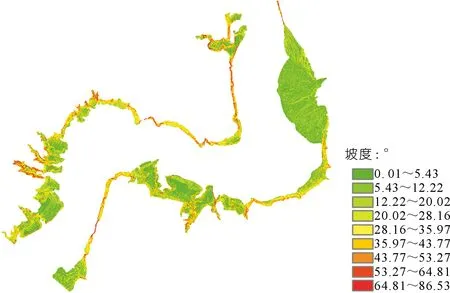
图5 试验区坡度分布Fig.5 Slope distribution of the test area
试验区规则格网DEM模型基于Horn算法得到试验区坡向分布图(见图6)。坡向随地形分布变化无规律性,难以用一根水下测线来代表两岸坡向方向。
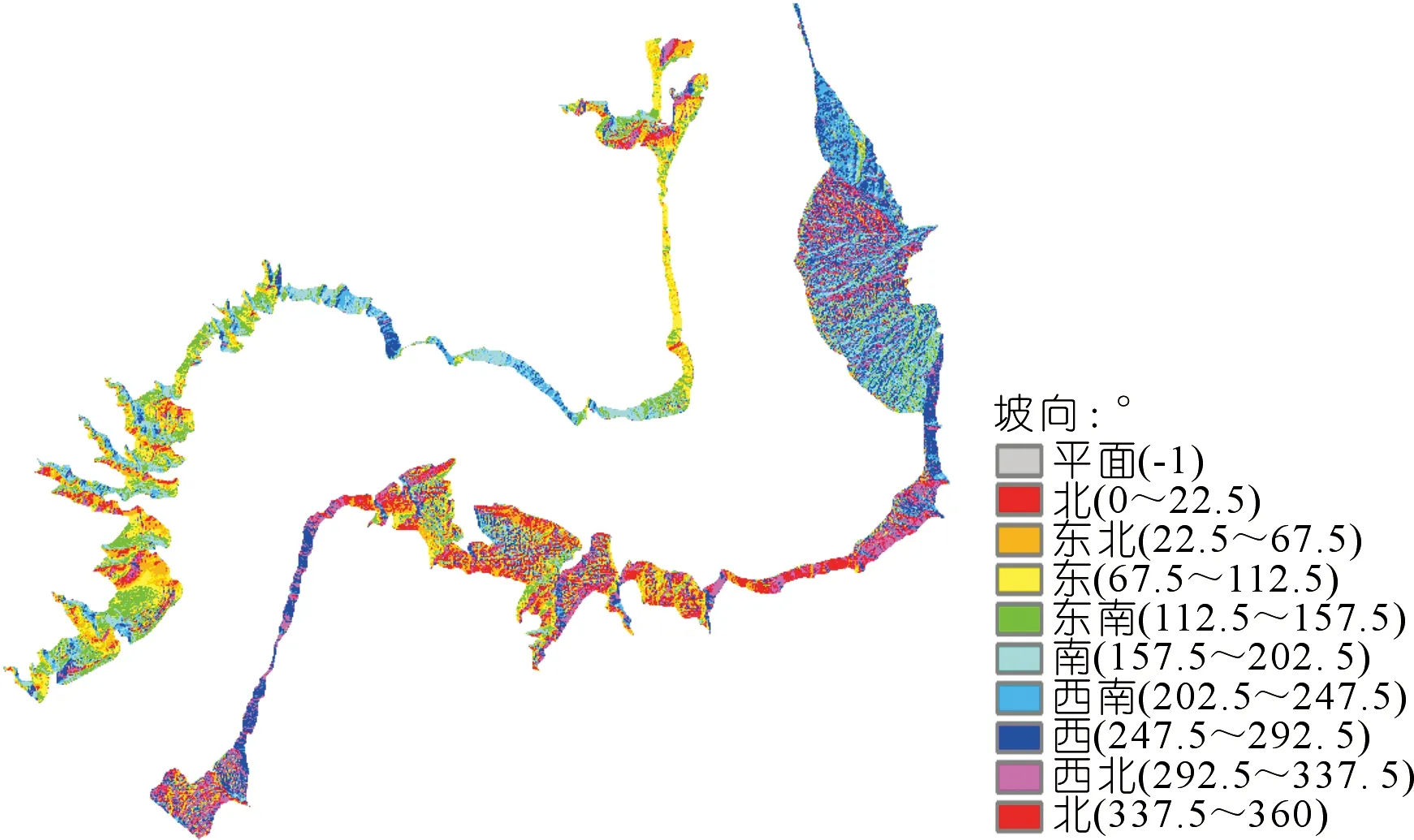
图6 试验区坡向分布Fig.6 Slope direction direction of the test area
4.2 试验区精度分析
原始数据导入到试验区坡度、坡向分布图中,通过提取分析得到该数据在空间条件下的坡度、坡向,运用数学改正模型实现波束角效应的改正,部分数据改正前后信息见表1。
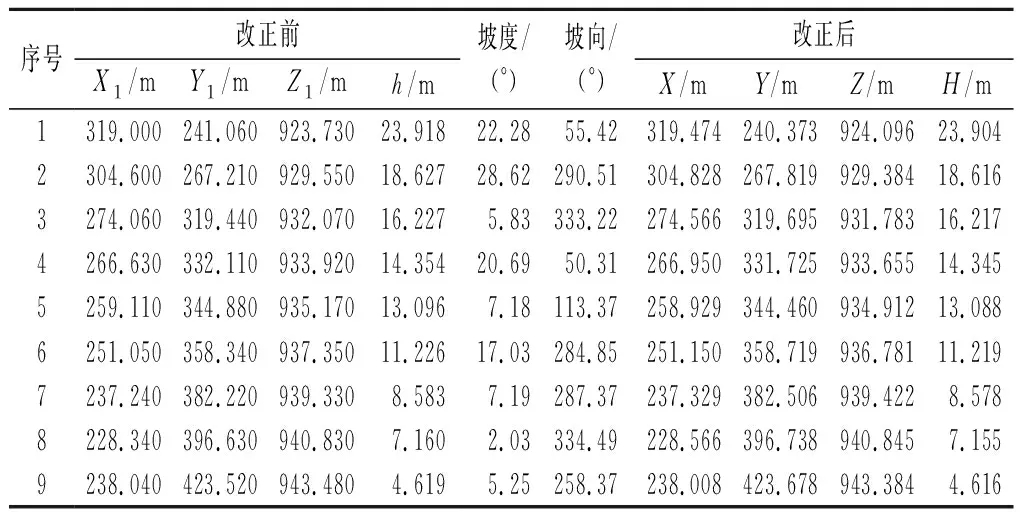
表1 部分试验测深数据改正Tab.1 Correction of part test bathymetric data
4.2.1较差统计
单波束测深数据样本1 796个,改正前、后与机载LiDAR点云数据对比较差分布见图7。由图7可见,该方法改正前后较差值变化明显,改正前差值为正的数据占比为55.4%,差值为正数据的数量明显多于差值为负的数据,与波束角效应把地形测浅的规律相一致;改正后较差主要集中在0.25 m以内,占比为72.2%。改正后在相同绝对值较差情况下([0,0.25]区间除外),区间(-∞,-0.25)与(0.25,+∞)的数量占比分别为8.2%和7.1%,分布图符合测量随机误差的规律。较差[0,0.25]区间内数量占比为57.1%,说明可能还受到其他测量误差的影响。
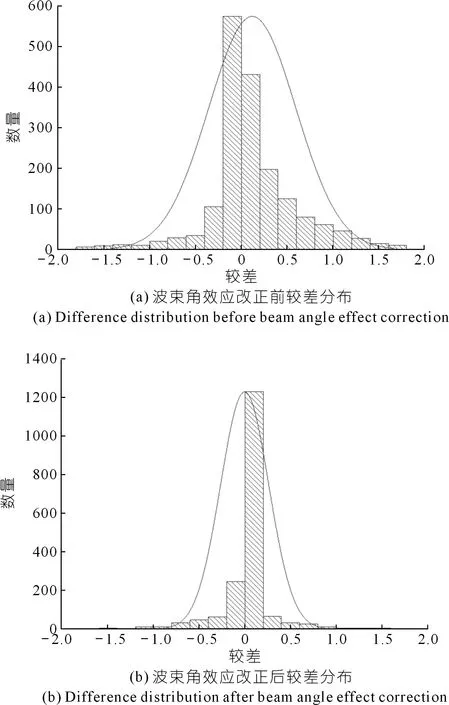
图7 试验数据较差分布Fig.7 Distribution of test data difference
4.2.2中误差统计
中误差是描述观测精度较为科学的指标,计算求得中误差计算公式为
(9)
根据公式(9)求得改正前中误差为0.49 m,经过波束角效应改正后中误差为0.25 m,精度提高48.6%。将改正前、后中误差按不同深度进行统计可得到测深中误差统计结果,见表2。

表2 测深中误差统计Tab.2 Mean square error of measuring depth m
从表2可知,改正前水深20 m以内中误差为0.48 m,水深20 m以上中误差为0.51 m,改正后水深20 m以内中误差为0.24 m,水深20 m以上中误差为0.28 m。经过测深改正后,测量精度也满足SL257-2017《水道观测规范》对测深点深度中误差的要求[18]。
根据不同坡度以及相对应的中误差统计分析得到坡度-中误差关系图(见图8),根据不同水深以及相对应的中误差统计得到水深-中误差统计图(见图9)。
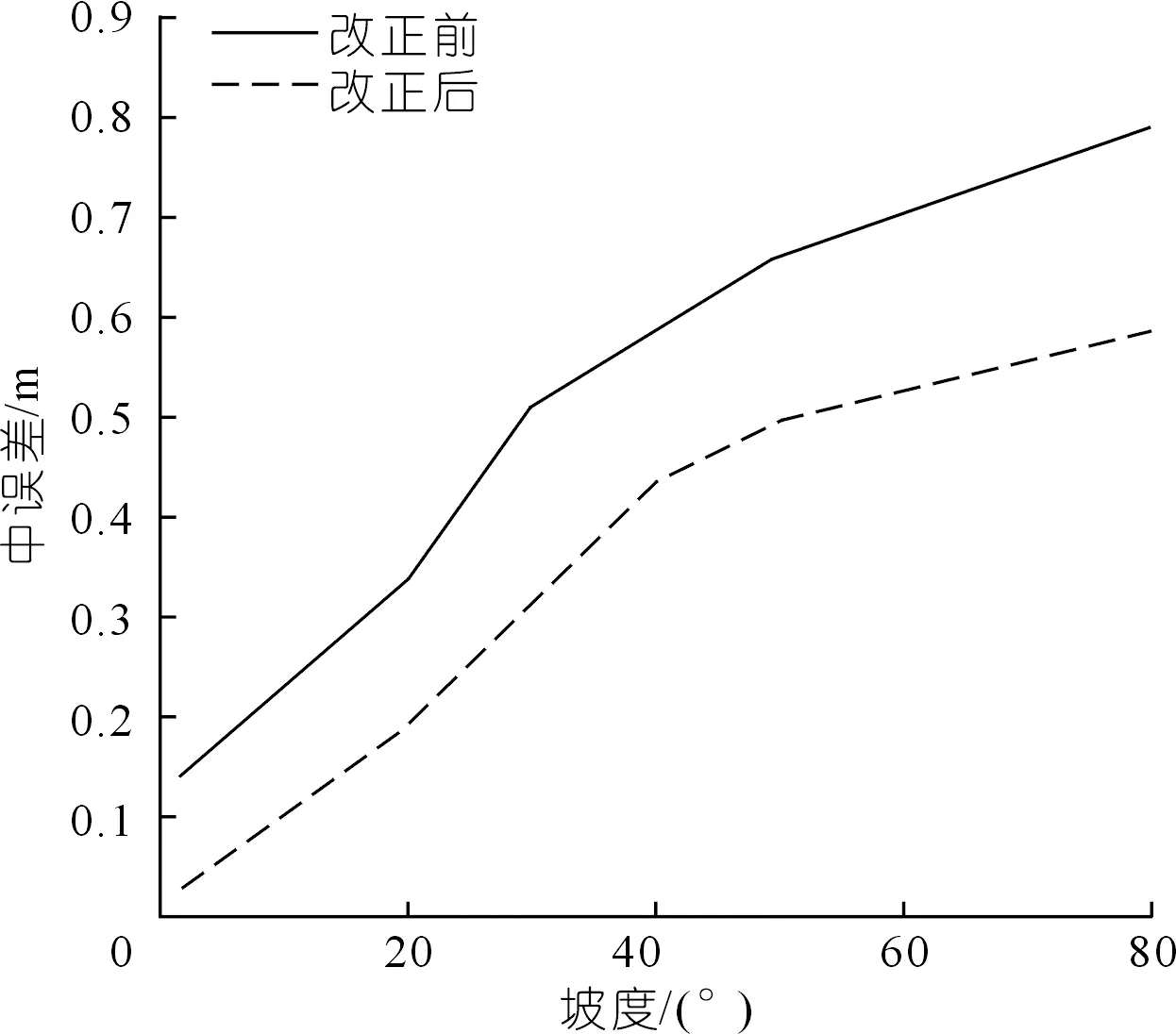
图8 坡度-中误差关系Fig.8 Slope-mean square error relationship
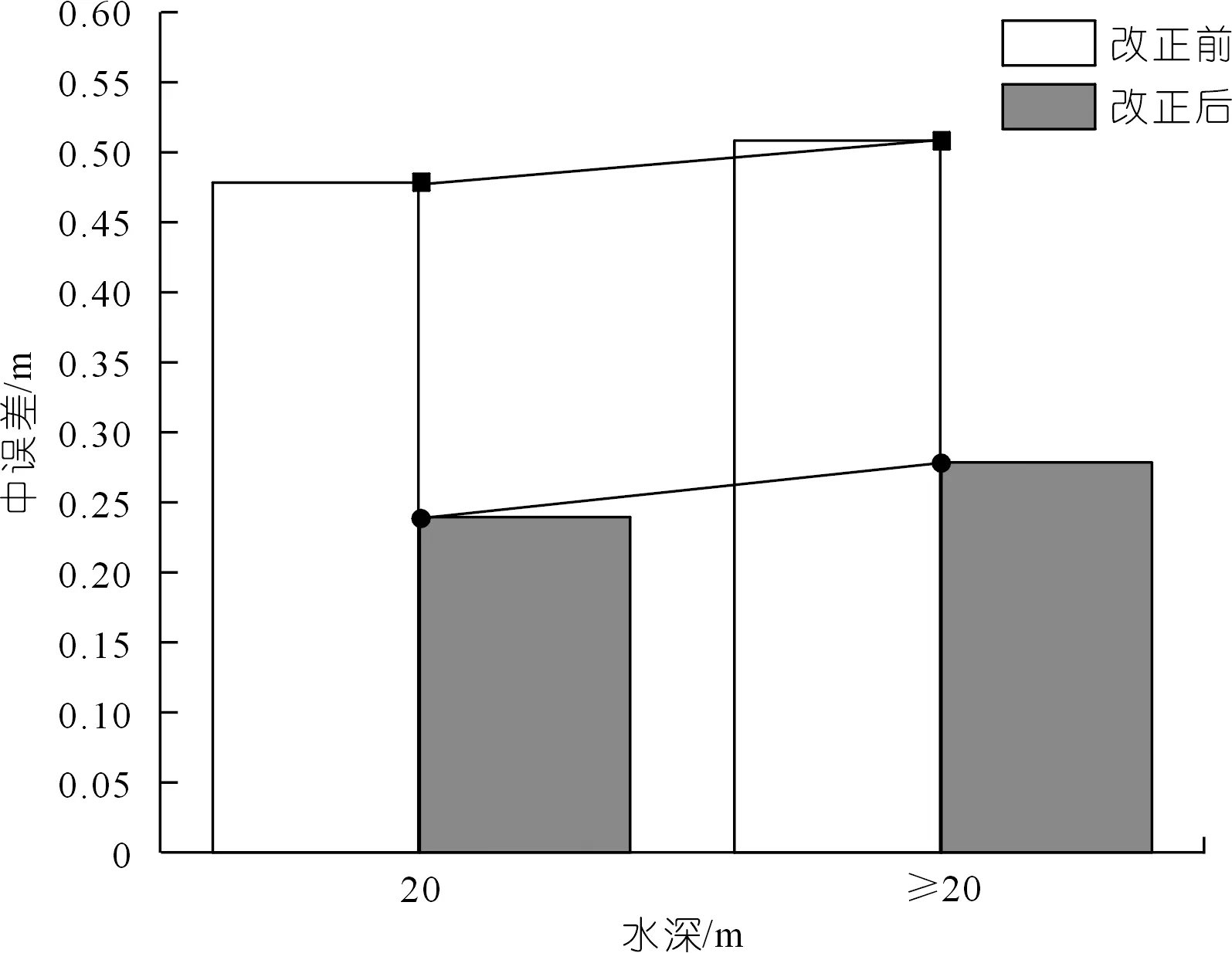
图9 水深-中误差统计Fig.9 Statistical chart of bathymetric-mean square error
从图8中可以得到,随着坡度的增大,测深中误差也随之增大。对比分析坡度、水深与中误差关系图,发现深度的综合影响系数远小于坡度的影响,坡度与测深中误差正相关。
5 结 论
本文系统论述了一种基于多尺度数学模型测深波束角改正方法,该方法基于测深换能器波束“锥形”发射的形态、水下地形三维空间形态建立波束角效应多尺度数学改正模型,利用Horn算法拟合改正模型关键尺度水下地形点空间上坡度、坡向,实现三维空间下测深波束角效应的改正。经过试验定性定量分析,结果表明:波束角效应带来的影响明显减弱,改正后测深中误差精度提高48.6%,倾斜地形水下测量的精度得到有效提升;水下地形的坡度是影响波束角效应的主要因素。综上所述,本方法为波束角效应的改正研究提供了新的方向,对于提高单波束测深精度具有一定的借鉴意义。
