基于分数阶微分的高光谱图像特征提取与分类
2023-12-02刘敬,李洋,刘逸
刘 敬, 李 洋, 刘 逸
(1. 西安邮电大学 电子工程学院,陕西 西安710121;2. 西安电子科技大学 电子工程学院,陕西 西安710071)
1 引 言
地物分类是高光谱遥感图像的一个重要应用,其主要目的是通过高光谱图像各个像素的光谱信息或空间信息的差异来对地物进行分类。目前主要的研究方向有三个,一是从高光谱图像的光谱特征出发,提取像素光谱特征进行分类[1];二是从高光谱图像的空间特征出发,提取像素空间特征进行分类[2];三是结合高光谱图像的光谱信息和空间信息,提取空谱联合特征,既利用高光谱图像图谱合一的特性,又进一步加强地物分类的准确性[3-4]。
从光谱特性的角度来看,高光谱图像是以一维矢量的形式来表示像素的光谱曲线。然而,由于时间、环境等因素的影响,不同地物的光谱可能在某些波段出现混叠,导致不同地物之间的光谱差异较小。此外,由于高光谱图像波段数量多,常有上百个波段,并且波段间具有较强的相关性,容易产生维数灾难从而使分类精度下降,影响地物的分类结果,如何解决上述问题是当前的研究重点之一[5]。目前,主流的解决方案是使用降维方法将高光谱遥感数据投影到低维的特征子空间中,再对地物进行分类,如主成分分析[6](Principle Component Analysis, PCA)和线性判别分析[7](LDA)等。
从空间特性的角度来看,高光谱图像由若干个波段上的二维图像堆叠而成,因此,空间特征的提取也可以在一定程度上提高地物分类的准确性,经典方法主要分为空间纹理特征提取、空间邻域像素特征提取等[8-9]。空间纹理特征提取通过获得高光谱图像各个波段上二维图像的空间纹理信息或形态学特征,并将提取的特征组成多维向量,最后通过分类器进行分类,如局部二值模式、Gabor 特征和灰度共生矩阵等[10-12]。空间邻域像素特征提取是将目标像素与其邻域像素的关系通过模型相结合并实现分类,常用的邻域特征提取方法有稀疏表示[13]和协同表示[14]等。
以上两种方法分别通过提取有效的光谱特征和空间特征来进行分类。事实上,将光谱特征与空间特征相结合实现地物分类是目前主要的研究方向,如对高光谱图像的光谱进行降维,再对降维后的数据进行空间特征提取等。Fauvel等研究并总结了结合空谱信息的高光谱图像分类方法,提取图像的形态学轮廓特征进行分类,并验证了空谱联合特征提取对提升高光谱图像分类准确性的重要性[15]。Hu 等先对高光谱图像采用PCA 降维,将降维后的主分量采用多空间域双边滤波提取特征,并且通过极限学习机验证特征的有效性[16]。Sun 等结合高光谱图像的空谱信息,提出了一种简单有效的空谱方法(SESS),该方法针对高光谱图像的光谱信息采用改进的稀疏子空间聚类法进行波段选择,以减轻由于波段数和像素数过多造成的计算负担,并采用多尺度低秩分解提取高光谱图像的多尺度空间特征,最后提出L-NPE 算法融合提取的光谱特征和空间特征,提高地物识别准确率[17]。Yuan 等利用多光谱图像和高光谱图像的空谱信息以及SAR图像的几何和偏振特性提出多模态协同融合算法,以获得高质量的融合图像,提升识别率[18]。
除上述传统特征提取方法,近年来深度学习算法可以从高光谱图像提取更具鉴别性的深度特征,提高分类精度。Chen 等提出一种堆叠式自动编码器[19](SAE)和深度信念网络[20](DBN)来获取高光谱图像的深度特征以进行分类,但在此过程中仅限于提取光谱信息,忽略了空间信息。Hu 等将一维卷积神经网络(1DCNN)应用于高光谱图像,此时仍然只使用光谱信息而不考虑空间信息[21]。Alipourfard 等将高光谱图像降维至低维子空间,降低了光谱像素的维数,然后使用二维卷积神经网络(2DCNN)进行分类,考虑了高光谱图像的空间信息[22]。为充分利用高光谱图像的光谱和空间信息,Chen 等使用PCA 降低光谱像素的维数,并将降维数据送入三维卷积神经网络(3DCNN),提取高光谱图像的深层空谱联合特征[23]。此外,随着网络结构的不断更新迭代,高光谱图像的地物分类精度也不断提高。Transformer 网络具有高效的模型训练速率以及自注意力机制,Liu 等基于Transformer 模型提出了一种HSI-TNT 模型框架,该模型利用位置编码以及逐像素展开策略减少光谱信息和空间信息的损失,并采用两层T-Block 融合高光谱图像的局部特征和全局特征,提高高光谱图像的地物分类准确率[24]。
为有效提取高光谱图像的特征用于地物分类,本文提出一种基于分数阶微分的特征提取算法,用于提取高光谱图像像素空间的分数阶微分特征(Spatial Fractional Differential, SpaFD),然后将SpaFD 特征与原始特征直连融合获得混合特征(SpaFD-Spe-Spa),最后将SpaFD 特征与SpaFD-Spe-Spa 特征分别送入3DCNN、混合光谱网络[25](HybridSN)、经光谱PCA 降维后送入3DCNN(3DCNNPCA)进行深度特征提取。本文提出的特征提取算法有以下优点:(1)可以提取尽可能完整的地物边缘特征,并在一定程度上抑制噪声。高光谱图像中大部分地物的边缘特征较为明显,如柏油路、房屋等,它们的边缘多为细而长的像素集合,而边缘和噪声点具有局部不连续的特点,它们所对应的邻域像素的灰度值变化剧烈。因此提取高光谱图像SpaFD 特征时,对每一个像素提取的特征都包含其邻域像素的信息,且距离目标像素越近的点,它的信息被保留得越多,使边缘被更完整地提取出来;噪声由于其随机性,当噪声点离中心像素越远时,分数阶微分的全局性反而起到了抑制噪声的作用。(2)在增强地物较尖锐纹理细节的同时保持平滑区域的空间特征不被破坏。高光谱图像中,灰度值变化缓慢的区域通常对应同类地物所在的区域,而灰度值变化剧烈的区域往往代表边缘信息。若过分提取边缘特征,诸如森林、植被等地物其内部空间特征会损失较多,影响地物分类。空间分数阶微分可明显加强类间边缘特征,同时保证类内空间特征被充分保留。(3)对不同的高光谱图像数据可以调节不同的微分阶数。由于数据获取的地区不同,不同的高光谱图像包含的地物种类和分布情况也不同,这导致它们适宜的分数阶微分掩模的阶数可能不同。本文所提空谱联合准则用于选取合适的微分掩模阶数,针对不同的数据可以给出适合该数据的阶数,更有利于特征提取与分类。
2 相关工作
2.1 分数阶微分的数值计算
分数阶微分目前主流的定义方式主要有GL 定义、R-L 定义以及Caputo 定义3 种。在数值计算过程中,G-L 定义在计算精度上要优于其他定义[26],因此,本文采用G-L 定义进行分数阶微分数值计算。对于任意实数v,考虑一个在区间[a,x]上可导的连续函数f(t),则它的v阶G-L 分数阶微积分定义为:
其中:f(v)(t)表示求函数的v阶微分,h为微分步长,[*]表示求整数部分。当h=1 时,f(t-jh)为函数自变量在(t-j)处的函数值,其中:
式中Γ( ⋅)为Gamma 函数。假设存在一个一元离散函数f(x),将其定义域[a,x]按照微分步长h=1 进行划分,可以推导得到该一元离散函数的v阶分数阶微分数值的计算表达式:
2.2 分数阶微分掩模
分数阶微分掩模常用于二维数字图像的边缘提取与纹理增强[27],较为经典的分数阶微分掩模有CRONE 掩模[28]、Tiansi 掩模[29]等。高光谱图像可看作若干个波段二维图像的叠加,因此,可以设计分数阶微分掩模实现高光谱图像空间特征的提取。
假设高光谱数据在空间上为二维信号fb(x,y),其中b表示该二维图像位于高光谱数据的第b波段上,根据式(3)设计正x、负x、正y、负y及4 个斜向45°共8 个方向的二维分数阶微分掩模,如图1 所示。

图1 八方向分数阶微分掩模Fig.1 Eight-direction fractional differential mask
图1 中,a0,a1,a2,a3,…,an分别为式(3)中等式右侧的前n项系数,即:
从图1 可以看出,分数阶微分掩模中的系数之和不为0,并且越靠近中心像素,系数与分数阶微分计算结果的关系越大。这表明当从高光谱图像的二维空间特征中提取空间分数阶微分特征时,在像素值变化很小或恒定的区域,提取的分数阶微分特征的变化很小;而像素值变化较大的部分所提取的特征会发生更大的变化。因此,通过在高光谱图像中提取分数阶微分特征,可以很好地增强区域中的纹理信息和边缘细节,从而提升分类效果。
3 原 理
3.1 高光谱图像分数阶微分特征提取
本文将分数阶微分掩模(见图1)用于高光谱图像的特征提取,设置微分阶数间隔为0.1,假设该掩模的尺寸为S×S,掩模中心为M(0,0),则高光谱图像的v阶SpaFD 特征可以通过高光谱图像的二维空间特征fb(x,y)与v阶分数阶微分掩模M( )v进行卷积操作获得。卷积过程表示为:
其中:fb(x0,y0)表示高光谱图像第b波段上的二维图像fb(x,y)在(x0,y0)处的值。卷积运算会超过fb(x,y)的边界,因此需要填充边界。假设fb(x,y)为P×Q的矩阵,根据掩模尺寸的不同,在fb(x,y) 的上下左右4 个边界上分别复制(S-1 )2 行边界的像素值以获得新矩阵,矩阵的大小为(P+S-1)×(Q+S-1),这确保fb(x,y)在与掩模卷积后仍可获得P×Q的矩阵,而不会丢失位于边界上的一些特征。
为保证二维分数阶微分掩模提取特征的响应与原始像素值在同一尺度下,在卷积运算之前还需要归一化掩模,具体方法是将掩模各个位置的系数除以掩模系数的总和。最后,将提取的特征与原始空间特征相加,以增强纹理细节。它不仅保留了原始的空间特征,还包含提取的分数阶微分特征。对于第b个波段高光谱图像的像素fb(x0,y0),最终得到的其v阶SpaFD 特征可以表示为:
应用式(6)提取高光谱图像各个波段的二维图像中的每一个像素特征,再将得到的特征按原波段顺序叠加,即可得到高光谱图像的v阶SpaFD 特征。特征提取流程如图2 所示,具体步骤如下:

图2 利用分数阶微分提取高光谱图像特征的流程Fig.2 Process of extracting hyperspectral image feature using fractional differentiation
步骤1. 构建图1 所示的v阶二维分数阶微分掩模,对掩模系数进行归一化处理,以保证利用掩模提取的特征响应与原特征处于同一尺度。
步骤2. 对高光谱图像各个波段的二维图像边界进行填充处理,并与二维分数阶微分掩模卷积。
步骤3. 将各波段的原始空间特征与二维分数阶微分掩模提取的相应特征相加,以增强纹理细节。
步骤4. 将各波段的二维图像通过上一步得到的特征按照原始波段顺序叠加,构成三维数据立方体,获得高光谱图像的v阶SpaFD 特征。
由于提取高光谱图像SpaFD 特征的过程中仅在空间实现特征提取,破坏了部分光谱特征,因此从光谱信息考虑,将原始特征与SpaFD 特征在光谱维度上混合构成SpaFD-Spe-Spa 特征。混合后的数据具有多种特征信息,有助于后续采用卷积神经网络实现进一步的深度特征提取,并提高地物分类效果。具体的特征混合方式如下:
假设原特征中每个像素对应的光谱数据x具有N个波段,向量形式表示为:
将原始数据应用式(6)提取v阶SpaFD 特征后,假设此时每个像素对应的光谱数据为t()v,则它同样具有N个波段,用向量形式表示为:
将得到的特征向量x与t( )v通过直连得到混合特征g,混合过程表示为:
其中“⊕”表示特征的直连,得到的g即为每一个像素的SpaFD-Spa-Spe 特征向量。可以发现,特征混合后数据维数多了一倍,但是相比SpaFD 特征增加了数据的光谱特征,拥有更多的类别可分信息,有利于提高地物分类精度。
3.2 基于空谱联合的分数阶微分阶数选择准则
在提取高光谱图像SpaFD 特征的过程中,微分阶数不同会导致提取的图像边缘成分不同,阶数较小易导致边缘提取不明显,而较大的阶数会过度提取产生噪声。此外,由于提取SpaFD 特征时仅考虑了高光谱图像的空间特征,忽略光谱特征,从而破坏了原有的光谱信息。因此从空间和光谱联合考虑,本文提出一种基于空谱联合的分数阶微分阶数选择准则,使SpaFD 特征可以提取较完整的边缘特征,同时尽量保留光谱可分性。
为直观显示各个微分阶数下SpaFD 特征的不同,以Pavia University 数据集第60 波段的灰度图作为例图,并将该灰度图与5×5 大小的分数阶微分掩模进行特征提取,原灰度图以及微分阶数v等于0.3,0.7,1.1,1.5 以及1.7 时的SpaFD 特征灰度图如图3 所示。通过对比可以发现,相比原始灰度图,提取的SpaFD 特征灰度图的对比度更高,并且随着微分阶数的提高,灰度图中的边缘信息被显著增强,图像锐化程度越明显;同时,阶数在0.1~0.9 阶内的图像增强效果更优。因此从增强效果的角度来看,SpaFD 特征的较优阶数应在0.1~0.9 内,然而考虑到高光谱图像图谱合一的特性,还需要联合光谱可分性寻找更精确的阶数范围,从而尽可能地提高物分类精度。
从光谱的角度来说,设高光谱图像的地物类别数为C,光谱波段数为N,则对高光谱图像提取v阶SpaFD 特征后,类内散布矩阵和类间散布矩阵分别为:
其中:ni表示第i类样本的数量,表示各波段提取v阶SpaFD 特征后第i类样本中第k个样本的值,Pi表示第i类样本的先验概率,表示各波段提取v阶SpaFD 特征后第i类样本的均值,μ(v)表示各波段提取v阶SpaFD 特征后所有类样本的整体均值。为使提取SpaFD 特征后光谱的可分性尽可能高,提出光谱可分性指标:
从二维图像的角度来说,标准差反映图像各位置的像素值与图像均值之间的差异,标准差越大,说明图像的边缘信息越丰富。因此,N个波段的高光谱图像各波段提取的v阶SpaFD 特征可以表示为并以图像标准差作为空间评价指标。先将各波段v阶SpaFD 特征求均值得到来近似代表各个波段SpaFD的空间特征,即:
图4 为Indian Pines,Botswana,Pavia University 和Salinas 4 个数据集的SpaFD 特征通过式(13)得到的均值图像。
图4 四个数据集的SpaFD 均值图像Fig.4 Mean SpaFD images of four datasets
计算均值图像的标准差指标:
其中:表示的均值,P×Q表示均值图像的尺寸。考虑到与存在数量级的差异,构造空谱联合准则前须对与实现数量级统一,采用L2 归一化分别处理与。令:
其中:σ10,σ11,...,σ19依次表示在阶数等于0,0.1,…,0.9 时的值;σ20,σ21,…,σ29依次表示在阶数等于0,0.1,…,0.9 时的值。归一化处理后的与分别为:
由式(17)与式(18)构建的空谱联合准则如下:
其中:JSpaFD表示各阶数下构造的准则所组成的向量,J0,J1,…,J9分别表示阶数为0,0.1,…,0.9 时的准则值。由于构造空谱联合准则的主要思想在于提取高光谱图像有效的SpaFD 特征的同时,保证光谱可分性尽量不被破坏。因此,对准则向量JSpaFD,选取适宜阶数v*时需保证该阶数对应的准则值在JSpaFD中的分量尽可能大,表示如下:
为直观表示空谱联合准则的构造过程,图5为空谱联合准则的构造流程。构造空谱联合准则的步骤具体如下:

图5 构建空谱联合准则的流程Fig.5 Flow chart of constructing spectral-spatial joint criterion
步骤1. 提取高光谱图像的SpaFD 特征。
步骤2. 计算SpaFD 特征中各像素光谱的类内散布矩阵与类间散布矩阵,并计算与矩阵的差值作为光谱可分性指标。
步骤3. 将像素在SpaFD 特征中各波段的二维特征根据式(13)计算均值,得到均值图像,并根据式(14)计算均值图像的标准差作为空间可分性指标,标准差越大则说明图像的边缘特征越丰富。
步骤4. 对各个阶数下的SpaFD 特征,根据式(17)和式(18)对它们的光谱可分性指标和空间可分性指标分别归一化,以实现数量级的统一。
步骤5. 将各阶数下归一化后的指标根据式(19)求和,获得空谱联合准则。
对每一个高光谱图像数据集各阶数的SpaFD 特征计算空谱联合准则值,图6 所示给出了采用5×5 微分掩模提取的SpaFD 特征的准则值在4 个真实的高光谱图像数据集上随着微分阶数v变化的曲线。从图中可以看出,Botswana,Indian Pines 和Salinas 数据集的变化趋势较为类似,在低阶微分时的准则值逐渐上升,在0.5 ≤v≤0.7 内提升较为明显,在0.7 阶以后迅速下降。Pavia University 数据集的准则值在0.1 ≤v≤0.3 内也略微提升,然后随着阶数v的增加逐渐减少,在0.7 阶后与其他3 个数据集的趋势类似,迅速下降。事实上,3×3 和7×7的微分掩模的准则值变化趋势与图6 近乎一致。由图6 可知,当选取的微分阶数位于准则值提升较大的范围内时,得到的高光谱图像SpaFD 特征提取的图像边缘特征较为明显,且光谱可分性较大的特点,有利于进一步提高地物分类的效果。

图6 提出的空谱联合准则与SpaFD 特征阶数的关系Fig.6 Relationship between proposed spectral-spatial joint criterion and order of SpaFD feature
4 实验结果与分析
为验证得到的SpaFD 特征与SpaFD-Spe-Spa 特征在地物分类上的有效性,并体现不同尺寸掩模对于分类结果的影响,实验中分别采用3×3,5×5 和7×7 的分数阶微分掩模提取特征,将提取的特征与原始特征、局部二值模式(LBP)特征以及将LBP 特征与原始特征直连融合的LBP-Spe-Spa 特征分别在3DCNN,3DCNNPCA以及HybridSN 3 种网络模型上进行对比,并对实验结果进行分析。
4.1 网络结构与参数
本文引入3 种网络模型用于特征的深度提取及地物分类,验证在不同网络模型上特征的有效性。3 种网络模型分别为3DCNN,3DCNNPCA以及HybridSN。表1 与表2 分别列出了3 种网络模型的卷积核尺寸和各层输出的特征图数目。其中,N和NP分别表示输入特征的维数以及通过PCA 降维后特征的维数,C表示地物类别数,I,Conv 和FC 分别表示输入层、卷积层与全连接层,如Conv4 表示该层为卷积层且位于整个网络结构中的第四层。

表1 三种网络模型的卷积核尺寸设置Tab.1 Convolutional kernel size settings for three networks

表2 三种网络模型的输出特征图数目Tab.2 Number of output feature maps for three network models
4.2 实验结果及分析
实验采用4 个真实的高光谱图像数据集,分别是Indian Pines,Botswana,Pavia University 与Salinas。其中,Indian Pines 图像尺寸为145 ✕145,共16 类地物,200 个光谱波段;Botswana 图像尺寸为1 476×256,共14 类地物,145 个光谱波段;Pavia University 图像尺寸为610×340,共9类地物,103 个光谱波段;Salinas 图像尺寸为512×217,共16 类地物,204 个光谱波段。实验中随机选取各类样本的3%,5%,10%作为训练样本,其余作为测试样本,并记录十次分类的平均总体精度(Average Overall Accuracy, AOA)与标准偏差(Standard Deviation, SD)用于评价分类效果,最佳分类结果在各个表中用粗体标注。
表3 为采用浅层的支持向量机(Support Vector Machine, SVM),最小距离(Minimum Distance, MD),逻辑回归(Logistic Regression, LR)分类器在20%训练样本情况下,10 次平均的识别结果比较。3 种浅层分类器均对光谱维进行分类,与深度学习的表格一致,Spe-Spa 代表原始光谱。表3 中没有放入LBP 特征的分类结果,因为单纯用LBP 方法分类的结果很差,有些数据仅有百分之十几或二十几的识别率,从这一点可以看出,SpaFD 特征优于LBP。采用SVM 分类器,SpaFD-Spe-Spa 分类结果均优于LBP-Spe-Spa,而采用MD 和LR 分类器时,SpaFD-Spe-Spa 大部分情况下的分类结果不如LBP-Spe-Spa。这可能是因为SpaFD-Spe-Spa 沿光谱维的样本呈现非线性可分,而MD 和LR 属于线性分类器,所以分类效果不好,而采用径向基函数为核函数的非线性SVM 分类器更适合SpaFD-Spe-Spa。SpaFD 和SpaFD-Spe-Spa 的特征识别率低于原始光谱,这是因为在提取SpaFD 空间特征时,光谱维的可分性会降低,且经典分类器沿光谱维分类,不能体现SpaFD 特征的优势;而3DCNN 可对SpaFD 和SpaFD-Spe-Spa 的空间特征进行进一步的深度特征提取并分类,更适合验证SpaFD特征的有效性。

表3 经典分类器在20%训练样本下的分类结果Tab.3 Results of classical classifiers with 20% training samples(%)
表4~表6 为Indian Pines 数据集分别在3%,5%和10%训练样本下的分类结果。相较Spe-Spa,LBP,LBP-Spe-Spa 特征,不同尺寸的分数阶微分掩模提取的SpaFD 特征和SpaFDSpe-Spa 特征的AOA 均有不同程度的提高,说明采用分数阶微分提取像素空间特征能增强地物识别效果。 而且SpaFD-Spe-Spa 特征比SpaFD 特征的AOA 更高,说明原始特征与SpaFD 特征混合后更具有判别性。通过对比可知,Spe-Spa 特征比SpaFD 特征与SpaFD-Spe-Spa 特征的SD 在大多数情况下更大,表明新特征的分类效果具有更好的稳定性。为直观表现分类结果,图7 以3DCNN 模型的结果为例,给出了Indian Pines 采用5×5 分数阶微分掩模提取特征的分类结果。

表6 Indian Pines 数据集在10%训练样本下的分类结果Tab.6 Classification results of Indian Pines under 10% training samples

图7 Indian Pines 数据5×5 分数阶微分掩模提取特征3DCNN 的分类结果Fig.7 Classification maps of Indian Pines using 3DCNN under 5×5 fractional differential mask for feature extraction
由表7~表9 可以发现,Botswana 数据集在3%,5%和10%的训练样本下,相较于Spe-Spa,LBP,LBP-Spe-Spa 特征,采用分数阶微分掩模提取的SpaFD 特征和SpaFD-Spe-Spa 特征的AOA 均有明显的提高,SD 却有一定的减小;并且当训练样本比例越少时,AOA 提升的效果越明显,说明二维分数阶微分提取的空间特征在提高地物分类效果的同时具有分类稳定性,特别在小样本时提取的新特征更有效。通过对比可以发现,混合特征SpaFD-Spe-Spa 相比SpaFD 特征的AOA 更高。为直观表现分类结果,图8 以3DCNN 模型的结果为例,给出了Botswana 采用5×5 分数阶微分掩模提取特征的分类结果。

表7 Botswana 数据集在3%训练样本下的分类结果Tab.7 Classification results of Botswana dataset under 3% training samples

表8 Botswana 数据集在5%训练样本下的分类结果Tab.8 Classification results of Botswana dataset under 5% training samples
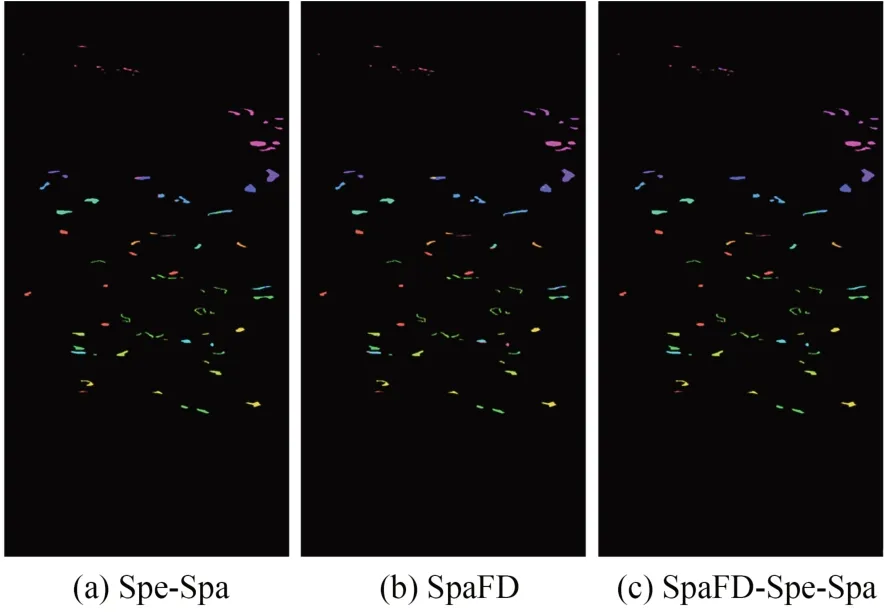
图8 Botswana 数据5×5 分数阶微分掩模提取特征3DCNN 的分类结果Fig.8 Classification maps of Botswana using 3DCNN under 5×5 fractional differential mask for feature extraction
表10~表12 是Pavia University 数据集在3%,5% 和10% 的训练样本时的分类结果。和Spe-Spa,LBP,LBP-Spe-Spa 特征相比,SpaFD 特征和SpaFD-Spe-Spa 特征的AOA 均有一定程度的提高,验证了所提特征对提高地物分类准确率的有效性,且在小样本时这种有效性更为直观。为直观表现分类结果,图9 以3DCNN 模型的结果为例,给出了Pavia University 采用5×5 分数阶微分掩模提取特征的分类结果。

表10 Pavia University 数据集在3%训练样本下的分类结果Tab.10 Classification results of Pavia University under 3% training samples

表11 Pavia University 数据集在5%训练样本下的分类结果Tab.11 Classification results of Pavia University under 5% training samples

图9 Pavia University 数据5×5 分数阶微分掩模提取特征3DCNN 的分类结果Fig.9 Classification maps of Pavia University using 3DCNN under 5×5 fractional differential mask for feature extraction
由表13~表15 可知,当Salinas 数据集在3%,5%和10%的训练样本下,采用3×3,5×5和7×7 的分数阶微分掩模提取的SpaFD 特征和SpaFD-Spe-Spa 特征相较Spe-Spa,LBP,LBPSpe-Spa 特征的AOA 均有一定提升,而SD 值却有所减少,这说明分数阶微分提取的像素空间特征在地物分类上更加有效且效果稳定。SpaFDSpe-Spa 特征相比SpaFD 特征的AOA 更高,说明原始特征与SpaFD 特征混合后在地物分类上具有更好的判别性。当采用小样本训练时,SpaFD 特征和SpaFD-Spe-Spa 特征相比原始特征在地物分类上的表现也更好,这说明在小样本训练的条件下提取的新特征要优于原始特征。为直观表现分类结果,图10 以3DCNN 模型的结果为例,给出了Salinas 采用5×5 分数阶微分掩模提取特征的分类结果。
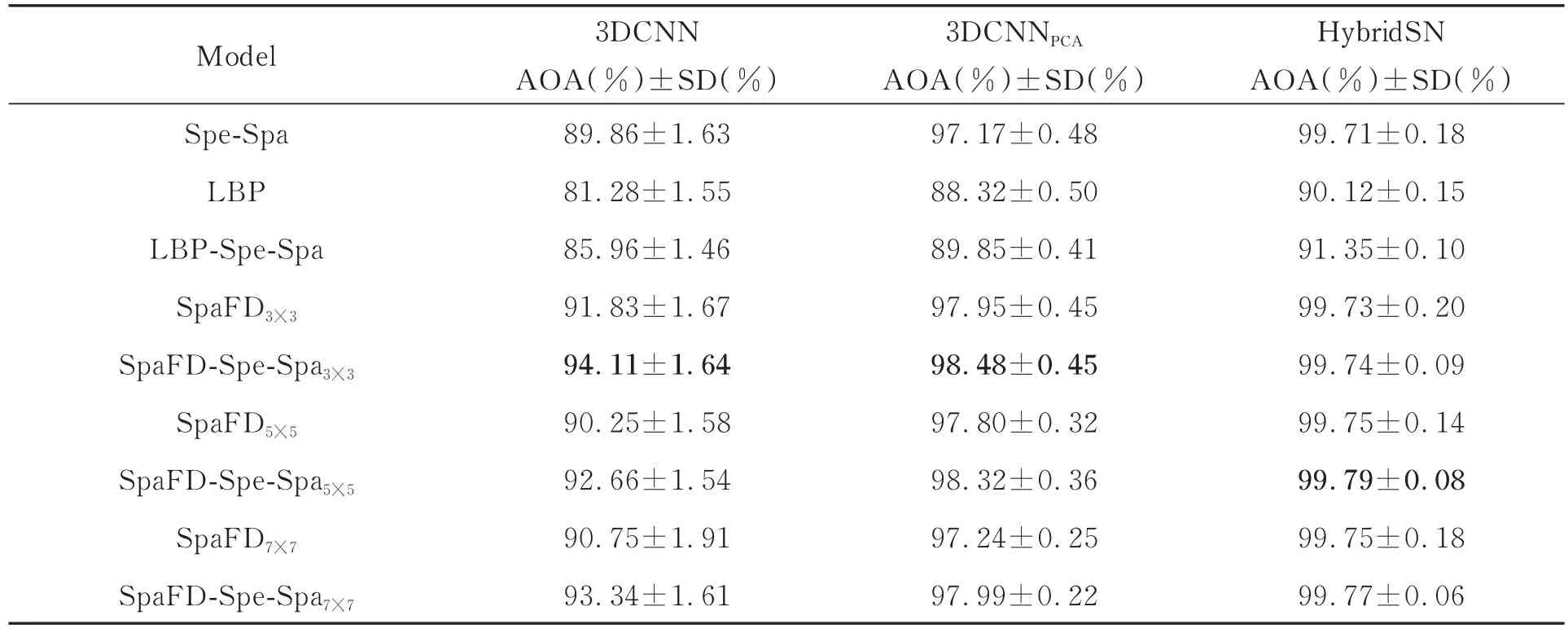
表13 Salinas 数据集在3%训练样本下的分类结果Tab.13 Classification results of Salinas dataset under 3% training samples

表14 Salinas 数据集在5%训练样本下的分类结果Tab.14 Classification results of the Salinas dataset under 5% training samples

表15 Salinas 数据集在10%训练样本下的分类结果Tab.15 Classification results of Salinas dataset under 10% training samples
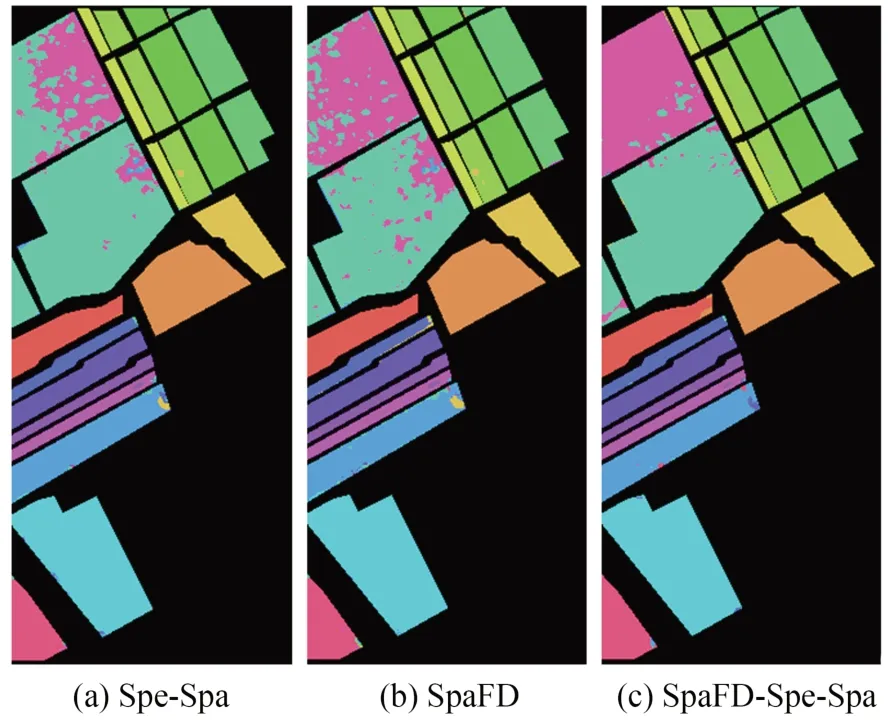
图10 Salinas 数据5×5 分数阶微分掩模提取特征3DCNN 的分类结果Fig.10 Classification maps of Salinas using 3DCNN under 5×5 fractional differential mask for feature extraction
5 结 论
本文提出了基于分数阶微分的高光谱图像特征提取算法。该算法首先通过空谱联合准则获取适合各图像的二维分数阶微分掩模,随后提取高光谱图像像素空间的分数阶微分特征SpaFD,并与原始特征直连融合进一步提取SpaFD-Spe-Spa混合特征,获得更具有判别性的特征。采用4 个真实的高光谱图像数据Indian Pines,Botswana,Pavia University 和Salinas,分别设计3✕3,5✕5和7✕7 的分数阶微分掩模提取上述4 种数据的SpaFD 特征与SpaFD-Spe-Spa 特征。在3DCNN与HybridSN 网络上的实验结果表明,SpaFD 特征与SpaFD-Spe-Spa 特征对地物分类的准确度均有一定程度的提升,且SpaFD-Spe-Spa 特征的分类准确率提升更为显著。
