分数阶大气混沌系统滑模同步的4个充分条件
2023-11-24毛北行王东晓
毛北行,王东晓
(郑州航空工业管理学院 数学学院,郑州 450046)
1 引言与预备知识
目前混沌研究已取得较多的结果[1-5],由于大多数实际系统均需用分数阶微分描述,且分数阶系统大量存在于工程实际中,因此随着分数阶微积分的引入,分数阶系统的滑模同步控制已引起人们广泛关注[6-8],其研究结果在生物、化学、医疗卫生、通讯和物理等领域应用广泛[9-12].滑模方法因其良好的鲁棒性能,被迅速引入到混沌系统同步控制中[13-14],并在气象学和天气预测中应用广泛.如文献[15]研究了大气混沌系统的系统仿真及动力学行为;文献[16]研究了分数阶大气混沌系统的比例积分滑模同步;文献[17]研究了分数阶不确定大气系统的自适应滑模同步,但设计的滑模面及控制量形式较复杂且不易实现.基于此,本文设计4种形式简单的滑模面及控制输入,得到分数阶大气混沌系统滑模同步的4个充分条件.
定义1[18-19]Caputo分数阶微分定义为

分数阶大气混沌系统[16-17]可描述为
(1)
当α=1,β=0.7,γ=1.5,c=26,q=0.947时,系统(1)的吸引子和混沌吸引子分别如图1和图2所示.
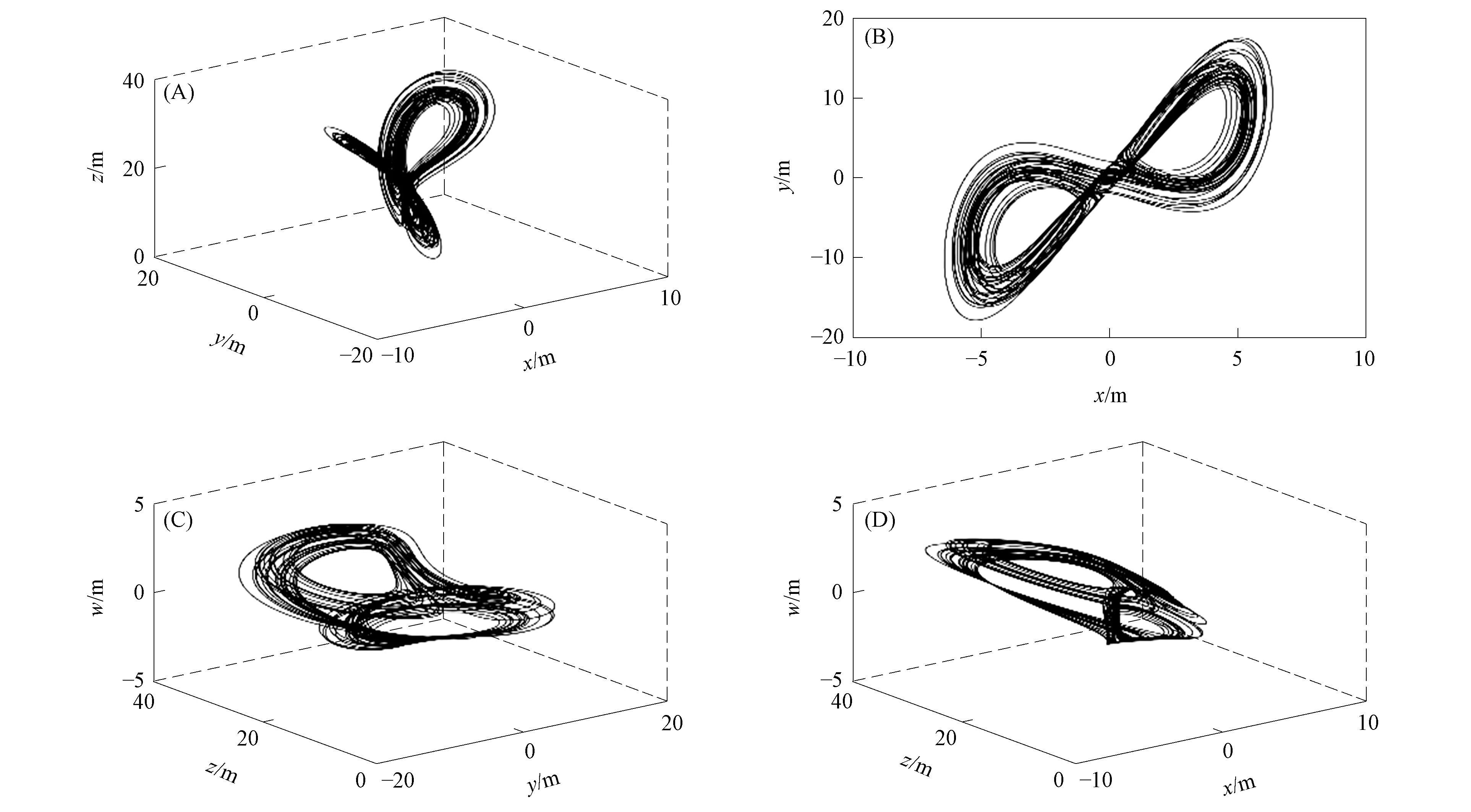
图1 系统(1)的吸引子Fig.1 Attractors of system (1)

图2 系统(1)的混沌吸引子Fig.2 Chaotic attractor of system (1)
定义从系统为
(2)
主从系统的同步误差为
e1=x1-x,
e2=y1-y,
e3=z1-z,
e4=w1-w,
则有
(3)


2 主要结果
定理1构造滑模面s(t)=e3+e1,控制量u1=-βe1-α(e2-e1)-γe4,u2=xy-x1y1,则系统(1)和系统(2)滑模同步.
证明: 当在滑模面上运动时,满足s=0,即有e3=-e1.代入式(3)第3个方程可得e3→0,从而e1→0,代入式(3)第2个方程可得
xz-x1z1=(xz-x1z)+(x1z-x1z1)=-xe3-ze1→0,

从而得s(t)→0.
定理2构造滑模面s(t)=e4-e1,控制量u1=-(γ+1)e1-αe4-α(e2-e1),u2=xy-x1y1,则系统(1)和系统(2)滑模同步.

xz-x1z1=-xe3-ze1→0,
从而得s(t)→0.
以式(1)为主系统,设计从系统为

(4)
其中Δfi(y)为不确定项,y(t)=(x1,y1,z1,w1)T,di(t)为系统外部扰动,ui(t)为控制输入,定义e1=x1-x,e2=y1-y,e3=z1-z,e4=w1-w,得到误差系统
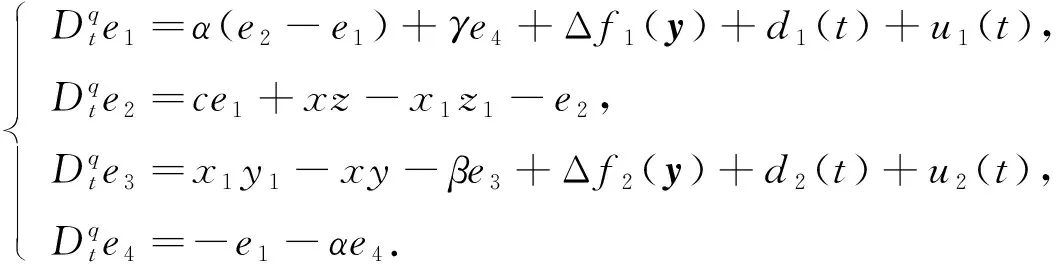
(5)
假设1|Δfi(y(t))|≤mi,|di(t)|≤ni(i=1,2),其中mi,ni>0为未知参数.
假设2|Δf2(y)+d2(t)|≤β|e3|.
定理3在假设1和假设2成立下,构造滑模面s(t)=e3+e1,控制量
若|s|>1,构造自适应律
(6)
若0≤|s|≤1,构造自适应律
(7)

证明: 当在滑模面上运动时,满足s=0,即有e3=-e1,代入式(5)第3个方程可得


由假设2可得e3→0,即e1→0.代入式(5)第2个方程可得
xz-x1z1=(xz-x1z)+(x1z-x1z1)=-xe3-ze1→0,
当不在滑模面上运动时,若|s|>1,其自适应律为式(6),构造
求分数阶导数可得
由引理2可得s(t)→0.
若0≤|s|≤1,其自适应律为式(7),构造
求分数阶导数可得
由引理2可得s(t)→0.
定理4在假设1和假设2成立下,构造滑模面s(t)=e4-e1,控制量

若|s|>1,构造自适应律
(8)
若0≤|s|≤1,构造自适应律
(9)



由引理2可得s(t)→0.

由引理2可得s(t)→0.
3 数值仿真

定理1~定理4的系统误差曲线分别如图3~图6所示.由图3~图6可见,初始时的曲线误差较大,但系统误差最终趋近原点.定理1~定理4的控制量曲线分别如图7~图10所示,4个定理中均只需设计2个控制器,而一般的滑模方法均需设计4个控制器.由图7~图10可见,控制量随系统误差趋近于零而逐渐稳定在坐标原点附近,表明大气混沌系统的驱动响应系统取得了滑模同步.在定理3和定理4中,针对滑模函数不同取值设计了不同的滑模自适应律,若不分区间设计滑模自适应律,则在仿真部分无法避免符号函数导致的抖振现象,分区间设计可较好避免这种现象,该问题的解决对了解和掌握大气混沌运动规律及天气气象预报与海洋渔业捕捞均将发挥重要作用.
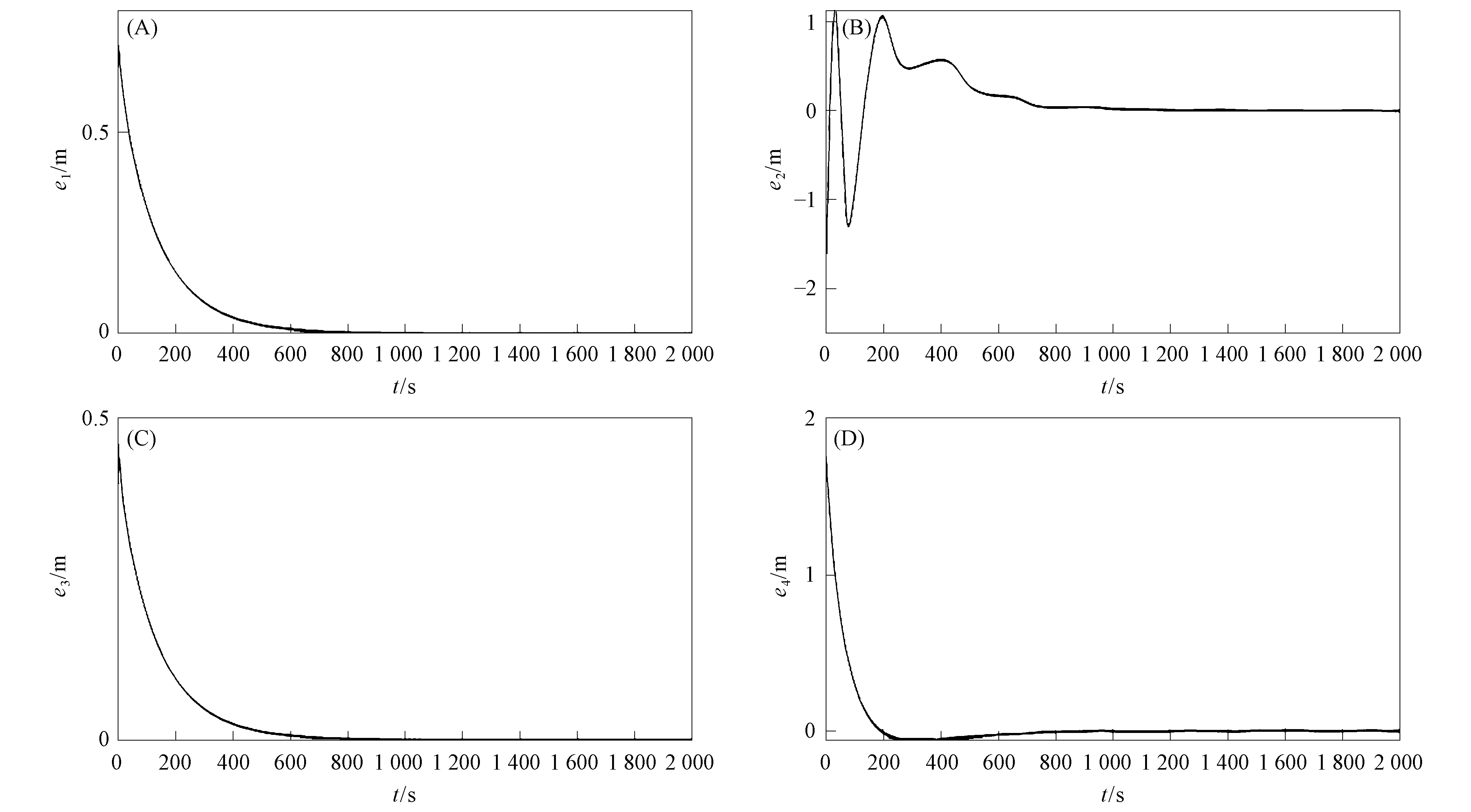
图3 定理1的系统误差曲线Fig.3 Systematic error curves of theorem 1
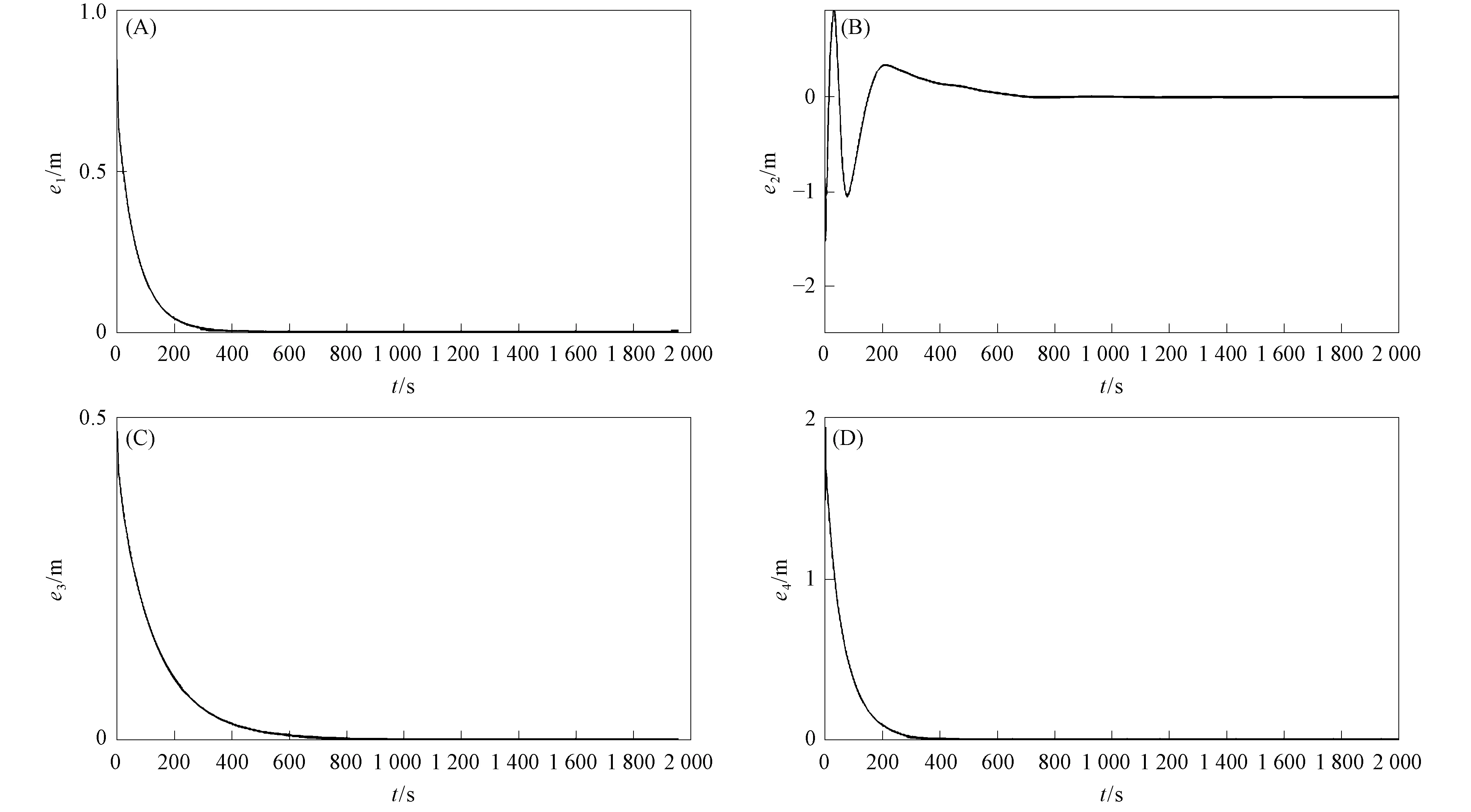
图4 定理2的系统误差曲线Fig.4 Systematic error curves of theorem 2

图5 定理3的系统误差曲线Fig.5 Systematic error curves of theorem 3
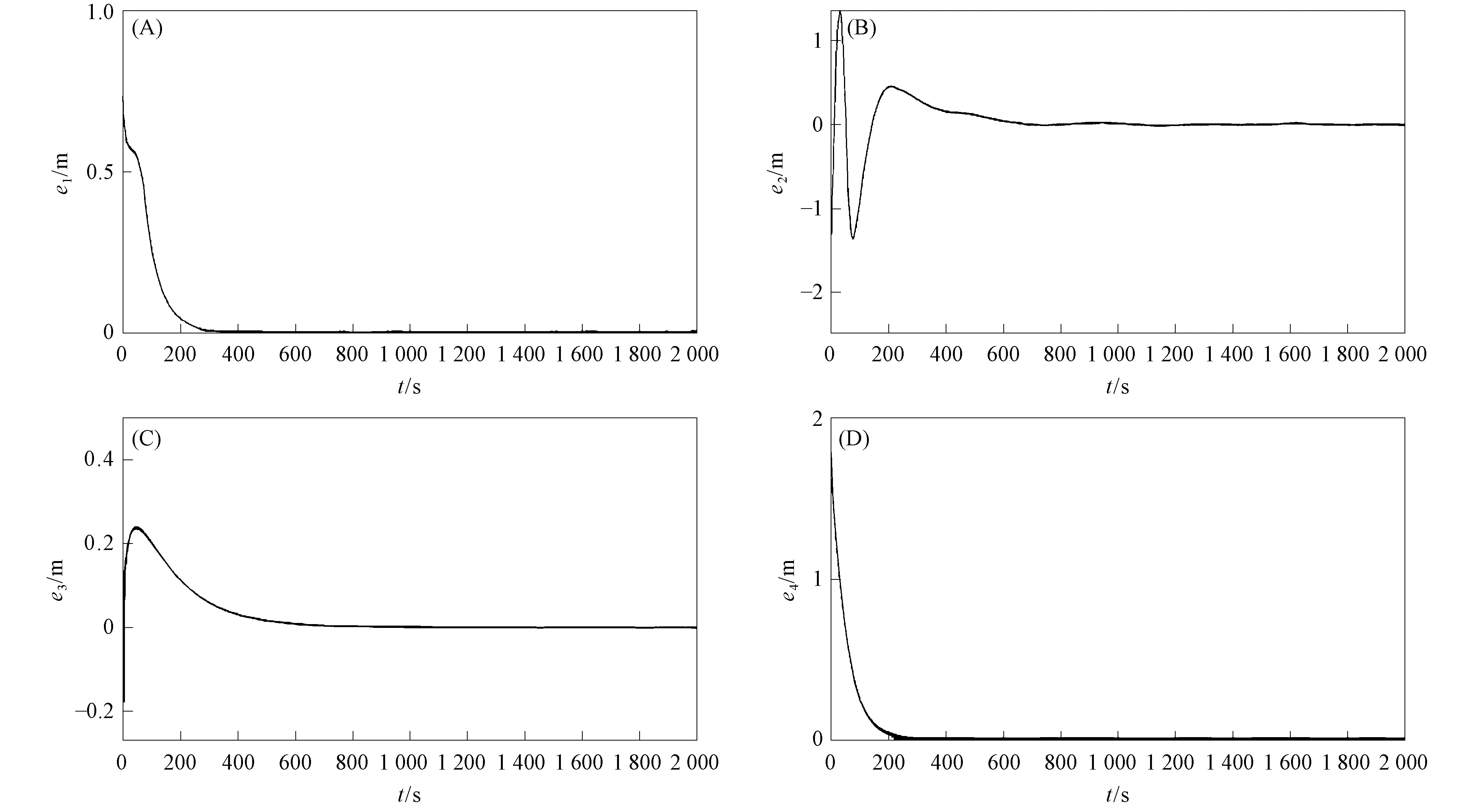
图6 定理4的系统误差曲线Fig.6 Systematic error curves of theorem 4
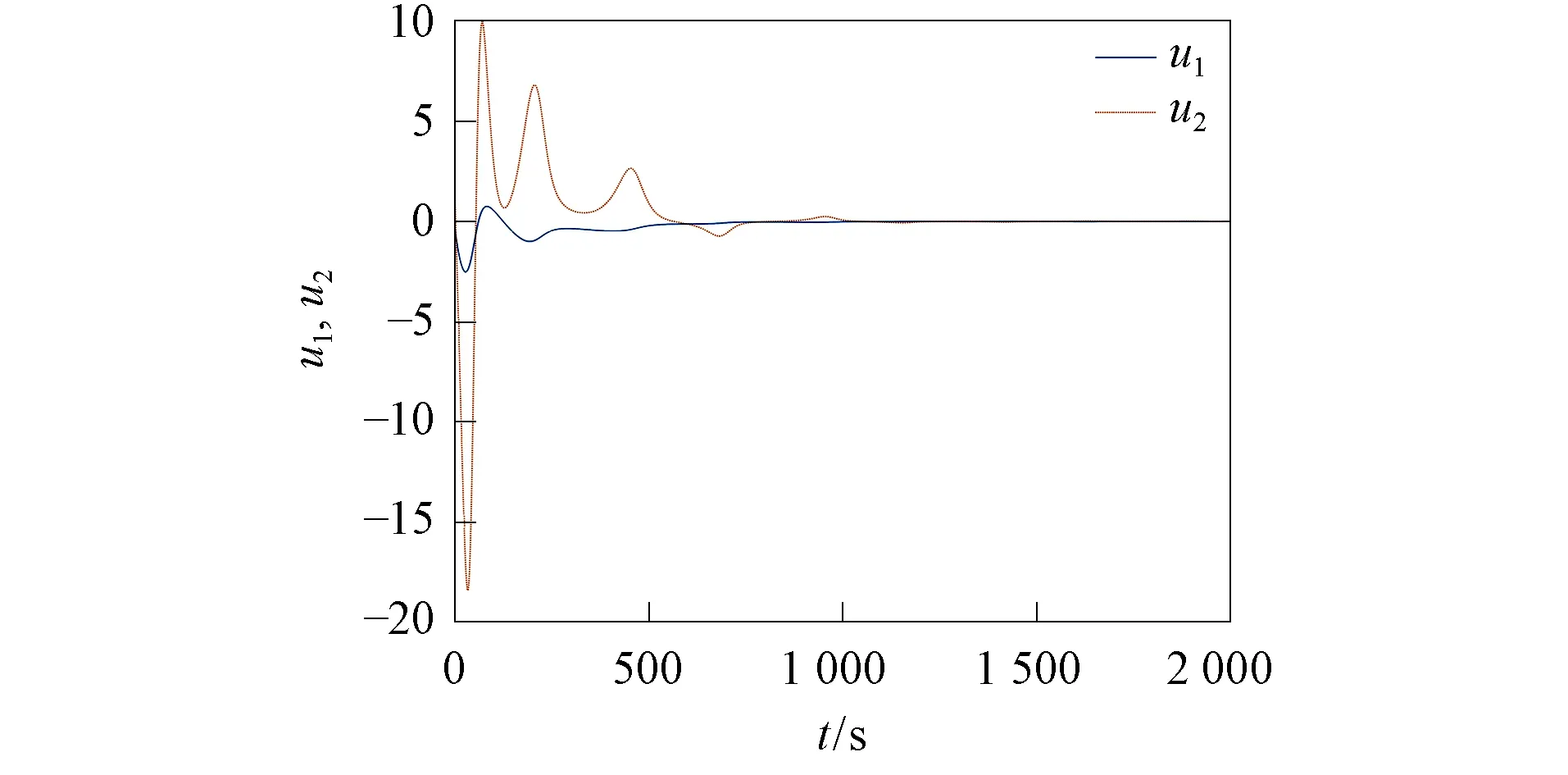
图7 定理1的控制量曲线Fig.7 Control quantity curves of theorem 1
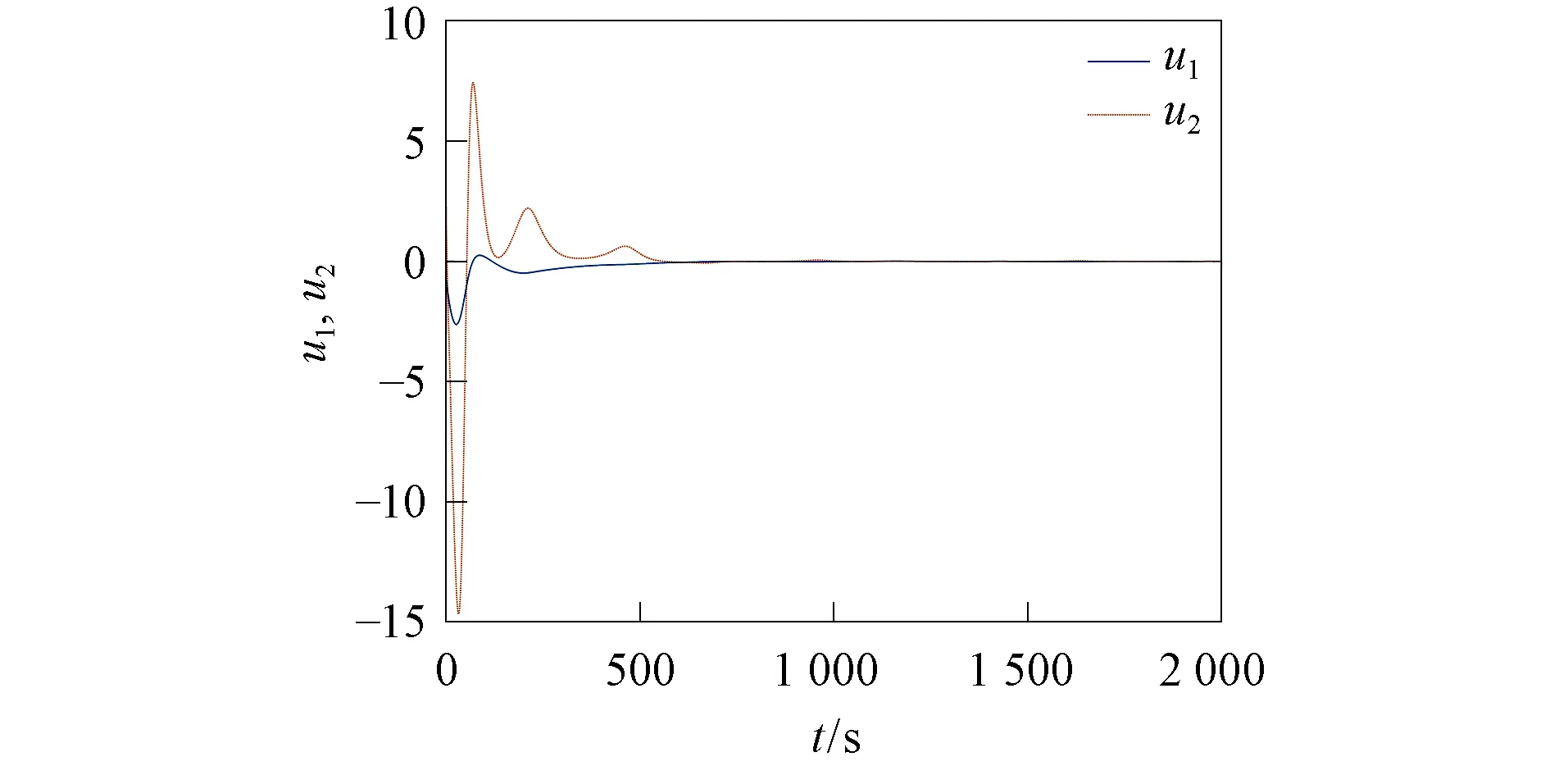
图8 定理2的控制量曲线Fig.8 Control quantity curves of theorem 2

图9 定理3的控制量曲线Fig.9 Control quantity curves of theorem 3

图10 定理4的控制量曲线Fig.10 Control quantity curves of theorem 4
综上,本文研究了分数阶大气混沌系统的滑模同步,通过引入分数阶微积分将受控系统建模为分数阶微分方程得到大气混沌系统取得滑模同步的4个充分条件,并通过MATLAB仿真程序对结论进行验证,结果表明,分数阶大气混沌系统在一定条件下主从系统可取得滑模同步.
