Fisher信息在噪声估计精度分析中的应用
2023-11-24潘铭樱冯象初
潘铭樱,冯象初
(西安电子科技大学 数学与统计学院,西安 710126)
图像在人类生活中具有重要作用[1],人们所接收到的信息大部分通过图像传递[2].但在图像被操作过程中会产生许多无用的信息,干扰了人们对图像信息的理解以及后续的处理结果[3],因此在图像进行处理前必须予以纠正,使得图像去噪研究备受关注.除基于滤波[4]、基于偏微分方程[5]和基于非局部自相似[6]等的传统图像算法外,新兴的基于深度学习的方法[7-8]也成为目前研究的重点.但这些算法大多数要求图像的噪声参数已知,而这在实际生活中不现实,因此噪声估计成为图像去噪过程中的重要一环.噪声估计的方法有很多[9-21],其中基于极大似然方程估计图像噪声参数是一个重要的研究方向[17-21].文献[19]研究表明,平坦图像块的信息主要来自于噪声,所以其通过极大似然估计从纹理较少的图像块中估计噪声参数,该算法取得了较好的效果.
分析估计参数的精度可以更清楚地了解参数与真实数据的匹配程度,减小因参数误差对实验结果造成的不良影响.虽然相关噪声估计的研究目前较多,但针对得到参数精度的研究却相对较少.Fisher信息[22]是数理统计中的重要概念,可用于观测可观察随机变量携带的关于其概率与所依赖的未知参数的信息量.本文以文献[19]中的方法为例,利用Fisher信息分析估计参数的精度.
1 预备知识
1.1 Fisher信息相关定理及推论
定义1(Fisher信息)[23]设X=(X1,X2,…,Xn)T~f(x,θ),θ∈Θ⊂p为C-R(Cramer-Rao)分布族.设X1,X2,…,Xn为独立同分布样本,X1~f(x1,θ),l(θ,x1)=logf(x1,θ),则有

引用大数定律和中心极限定理,则有
其中I(θ)即为X的Fisher信息.
定理1(强相合性)[23]设X=(X1,X2,…,Xn)T~f(x,θ),θ∈Θ⊂p为C-R分布族,并设X1,X2,…,Xn独立同分布,Θ为p上的开集.则似然方程在n→+∞时必有解并且是强相合的.即对真参数θ0∈Θ,有
定理2(渐近正态性)[23]设X=(X1,X2,…,Xn)T~f(x,θ),θ∈Θ⊂p为C-R分布族,并设X1,X2,…,Xn独立同分布,Θ为p上的开集.假设似然方程在n→+∞时有相合解且假设L(3)(θ)在Θ中存在并连续,则为θ的最优渐近正态估计,且有


1.2 噪声估计
文献[19]提出了一种针对通用信号相关噪声模型的参数估计方法,该模型通过改变参数值可以表示不同类型的噪声.该观测到的噪声模型可表示为
x=s+k0δ0+k1sγ·δ1,
(1)

其中M是选取的弱纹理块数量.对应的能量泛函为

(2)
2 噪声估计的精度分析

(3)

(4)
所以其Hessian矩阵为
从而可计算样本的Fisher信息为
然后对矩阵I(k)求逆,得
当n→∞时,有式(3)和式(4).证毕.
目前流行的图像处理软件,通常用8位表示一个像素,这样灰度级分为256等,像素位于0~255内,每个等级代表不同的亮度,称为图像的标准表示.为便于表示,还可对图像像素进行归一化处理,此时图像的像素则位于0~1内.本文以这两种图像为例,分别分析用不同像素表示对噪声估计结果的影响.
3 数值实验与分析
为验证理论推导结果即定理3的准确性,本文进行两组实验: 第一组实验是直接对不同模式下图像噪声参数进行估计,分析两个参数出现的误差范围;第二组实验是通过噪声估计算法以及改进的图像去噪算法进行盲去噪,以分析在不同图像模式和不同噪声占比下图像的去噪结果.实验中采用的图像都是标准测试集中的图像,如图1所示.

图1 标准测试集图像Fig.1 Images of standard test set
3.1 参数精度验证
根据定理3可推出在不同的图像表示模式下图像两种噪声的参数精度相反.本文用不同的图像模式分别表示标准测试集中的图像,并添加不同参数的噪声,用基于极大似然的噪声估计算法对噪声进行估计.在该过程中令指数参数γ恒等于常数.
对标准像素下的图像,首先在k1值恒定的情况下计算k0在不同值下的估计值,并将多张图像的估计数据进行整合,得到参数k0的误差区间;然后固定k0,用相同方法分析k1的误差区间.本文将误差结果用棒形图表示,如图2所示.由图2可见,用标准像素表示图像时,极大似然估计得到的加性噪声参数k0的误差大于乘性噪声参数k1的误差.
为保证归一化后的图像在加入噪声后的噪声程度不发生改变,本文将上述实验中设置的加性噪声的参数与255的比值作为加性噪声参数加入图像进行实验.乘性噪声与图像的像素值相关,在图像归一化后相当于加入的乘性噪声已经进行了归一化处理,所以k1值不发生变化.同理,在一个参数固定的情况下利用多张图像的估计结果分析另一个参数的误差区间,当图像像素值位于0~1内时参数k0和k1的误差棒形图如图3所示.由图3可见,此时k0的噪声估计误差非常小,而k1的误差相对大很多.
上述实验结果与经过理论分析得到的定理3相符,表明本文的理论分析正确.
3.2 算法盲去噪验证
文献[6]提出了一个可行的去除信号相关噪声的全局最小二乘(total least square,TLS)算法,本文对其进行适当改进,得到针对广义混合噪声模型的去噪算法,并用其测试当模型中的加性噪声和乘性噪声分别处于主要地位时,不同表示类型图像的去噪结果,以验证定理3的正确性.为便于研究,本文设指数参数γ=1.

图2 标准图像噪声参数估计结果Fig.2 Estimation results of standardimage noise parameters

图3 归一化图像噪声参数估计结果Fig.3 Estimation results of normalizedimage noise parameters
首先是乘性噪声占比较大的实验设定,在这组实验中设(k0,k1)=(5,0.3),(k0,k1)=(5,0.5),此时加性噪声程度相对较小而乘性噪声相对较大.得到图像的峰值信噪比(peak signal-to-noise ratio,PSNR)值以及结构相似度(structural similarity index measure,SSIM)值分别列于表1和表2.
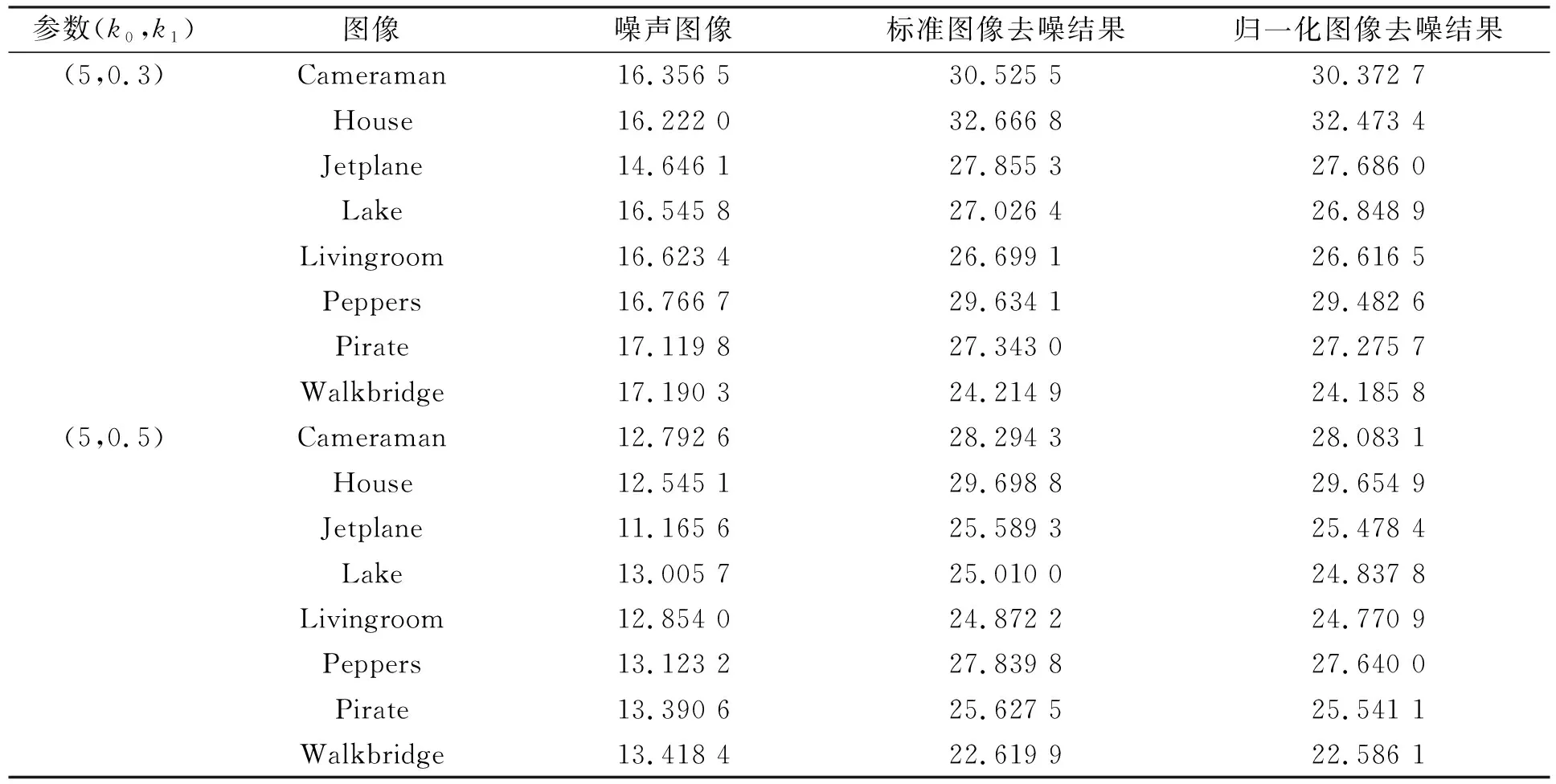
表1 乘性噪声占主要程度时不同图像下的PSNR对比
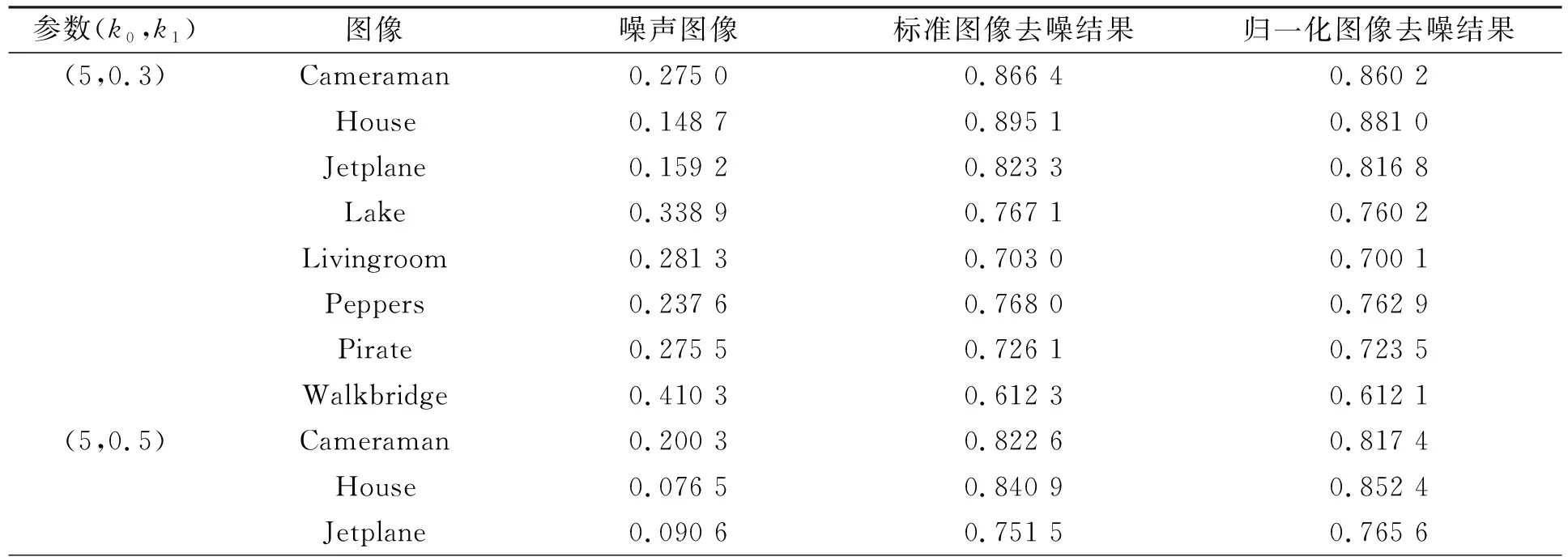
表2 乘性噪声占主要程度时不同图像下的SSIM对比

续表2
其次,设置适当的参数使噪声占比刚好相反,加性噪声程度相对较大而乘性噪声占比较小,此时设置的两组参数分别为(k0,k1)=(25,0.01)和(k0,k1)=(25,0.05).得到的图像PSNR值和SSIM值分别列于表3和表4.

表3 加性噪声占主要程度时不同图像下的PSNR对比
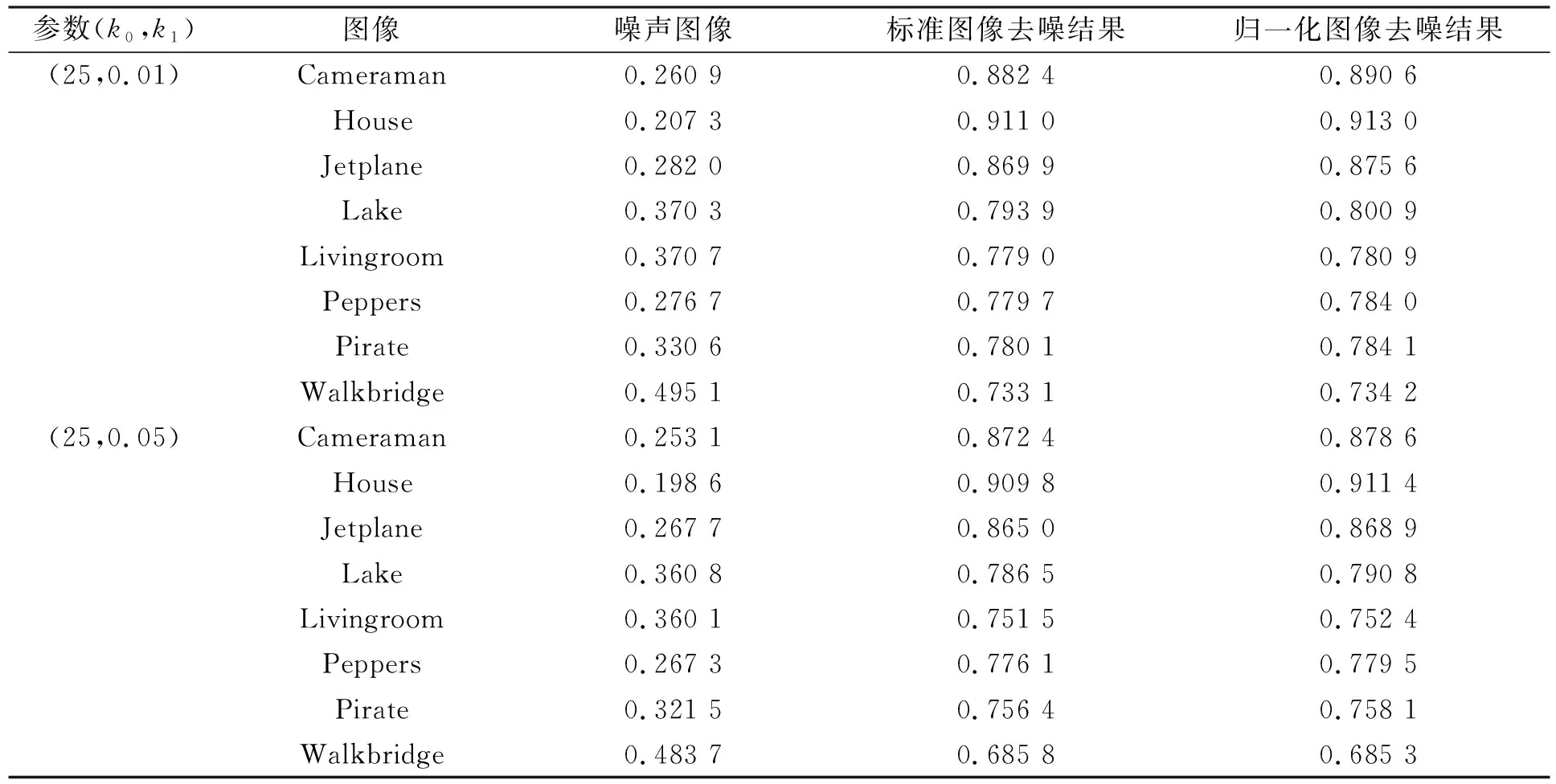
表4 加性噪声占主要程度时不同图像下的SSIM对比
为更直观地观察图像去噪的细节部分,本文给出Cameraman图像在(k0,k1)=(5,0.3)和(k0,k1)=(25,0.05)两组参数下的噪声图像和不同表示模式下去噪后的图像结果,分别如图4和图5所示.

图4 (k0,k1)=(5,0.3)时Cameraman图像不同模式去噪结果对比Fig.4 Comparison of denoising results for different modes of Cameraman images when (k0,k1)=(5,0.3)

图5 (k0,k1)=(25,0.05)时Cameraman图像不同模式去噪结果对比Fig.5 Comparison of denoising results for different modes of Cameraman images when (k0,k1)=(25,0.05)
在乘性噪声参数相对较大的情况下,乘性噪声在图像的噪声中占主导地位,如果乘性噪声参数估计相对较准确,则对应的去噪结果就相对较好.反之,在加性噪声程度较大的情况下,加性噪声参数估计的准确性会直接影响去噪结果的优劣.表1的结果表明,在乘性噪声参数相对较大的情况下,标准像素表示的图像去噪结果比归一化后图像结果的PSNR值更高,即前者的结果更接近于原始图像.表2中标准像素表示图像的SSIM值一般较高则表示其图像的结构信息优于归一化后的图像,说明标准像素图像乘性噪声参数的估计更准确.表3和表4的结果则表明在加性噪声程度较大时,实验得到的结果与之前的结果刚好相反,归一化后图像的去噪结果更好,说明其加性噪声参数的估计更准确.本文实验结果与定理3吻合,表明本文理论分析的结果正确.
综上所述,针对广义噪声模型的噪声参数估计问题,本文利用Fisher信息以及相关的渐近正态性给出了极大似然估计参数精度的理论分析.结果表明,在不同的图像表现模式下,估计得到的两类噪声的方差有较大差别: 对于像素位于0~255内的标准图像,其信号依赖噪声的精度较高,加性噪声的误差较大;对于像素位于0~1内的归一化后的图像,参数的精度结果则刚好相反.实验表明,本文的理论分析结果符合图像噪声参数的预测规律.
