基于多视角图像的纱线三维建模及毛羽测量研究
2023-11-14左新焕李忠健潘如如高卫东
左新焕, 李忠健, 王 蕾, 潘如如, 高卫东
(1.江南大学 生态纺织教育部重点实验室,江苏 无锡 214122; 2.绍兴文理学院 浙江省清洁染整技术研究重点实验室,浙江 绍兴 312000)
纱线的毛羽是指伸出纱线体表面的纤维[1]。纱线毛羽对纺织产品的加工和质量有很大影响[2-3]。虽然纱线毛羽具有防风、保暖、柔软、吸水等积极作用,但是在加工中部分长毛羽会产生棉结、飞花等,严重影响生产工作的进行,进而织物疵点增加,表面光洁度下降,起毛起球[4]等质量问题。因此,毛羽是纱线品质的重要参考指标之一。
纱线毛羽的检测方法主要有光电式测量法、烧毛称重法、投影计数法和静电法。由于传统人工测量误差较大,现普遍采用光电法仪器测量[5-6],其分为漫反射光电毛羽仪和投影计数法光电毛羽仪,前者采用的毛羽指标是毛羽H值,后者采用的指标是毛羽指数,两者的测试指标不统一且相关性存在差异。近年来有学者运用数字图像处理技术对纱线毛羽进行检测[7-8],并取得了一定的效果。但现有的二维图像缺失毛羽空间形态信息,使得测量结果与实际结果存在较大差别。有学者尝试毛羽的三维检测,Wang等[9]利用两个平面镜的反射,采集具有多个视角的纱线图像,重构纱线三维模型并检测毛羽长度。Wang等[10]根据旋转物体投影长度变化规律推导出计算公式,将各个角度下的纱线毛羽参数带入推导公式得到纱线毛羽真实长度和数量。李忠健等[11]从单幅散焦图像中恢复毛羽深度信息,根据分割结果追踪毛羽空间长度。
本文在文献[9]的基础上,构建多视角图像采集装置,针对毛羽检测的精度问题,对采集到的多视角纱线图像进行处理,构建纱线三维模型,对三维毛羽点云进行去噪、细化处理,结合纱线条干信息确定毛羽起点,由毛羽起点遍历其余细化点,将每根毛羽细化点归为一组计算长度,实现毛羽指标精确测量。
1 多视角成像
本文采用自主研发的多视角图像采集装置,如图1所示。纱线从纱筒引出,经过系列导纱辊1,在图像采集窗口3处呈竖直状态,并最终被两罗拉4夹持,纱线运行速度可在控制面板2进行调节。暗箱5可通过抽拉式滑轨进行开合,便于纱线样品放置,暗箱内侧设置平面镜支架7,用于固定双平面镜6,使其直立且镜面之间互成72°角。装置内侧安装光源8,为拍摄环境提供均匀的光照。相机9在装置内侧,垂直正对于双平面镜相交线的中轴线上,调节相机焦距及镜头放大倍数,可获取图像采集窗口3中的纱线实像,以及纱线在双平面镜上反射得到的4个虚像,即可在单幅图像上采集均匀分布的不同视角的5个纱线图像。
多视角图像采集系统俯视图如图2所示,R为真实纱线图像,V1和V4为真实纱线经平面镜1和平面镜2第一次反射后的虚像,V2和V3分别是V4和V1经平面镜1和平面镜2再次反射后的虚像,即真实纱线二次反射后的虚像。
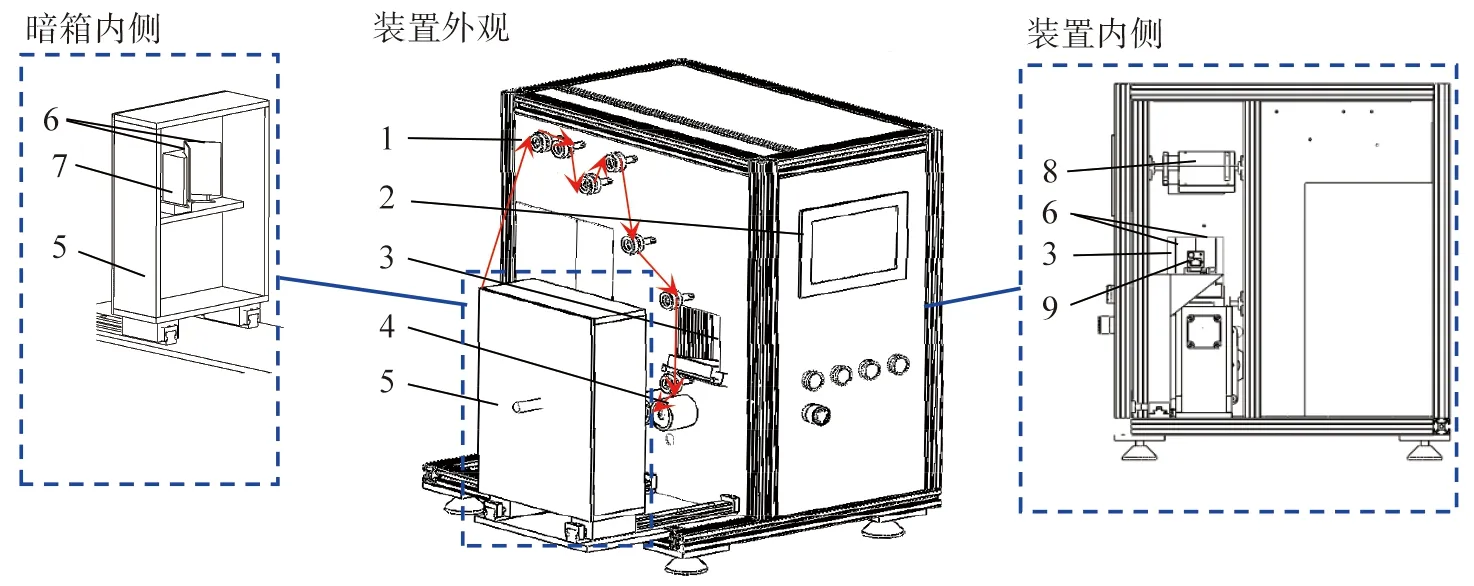
图1 多视角图像采集装置
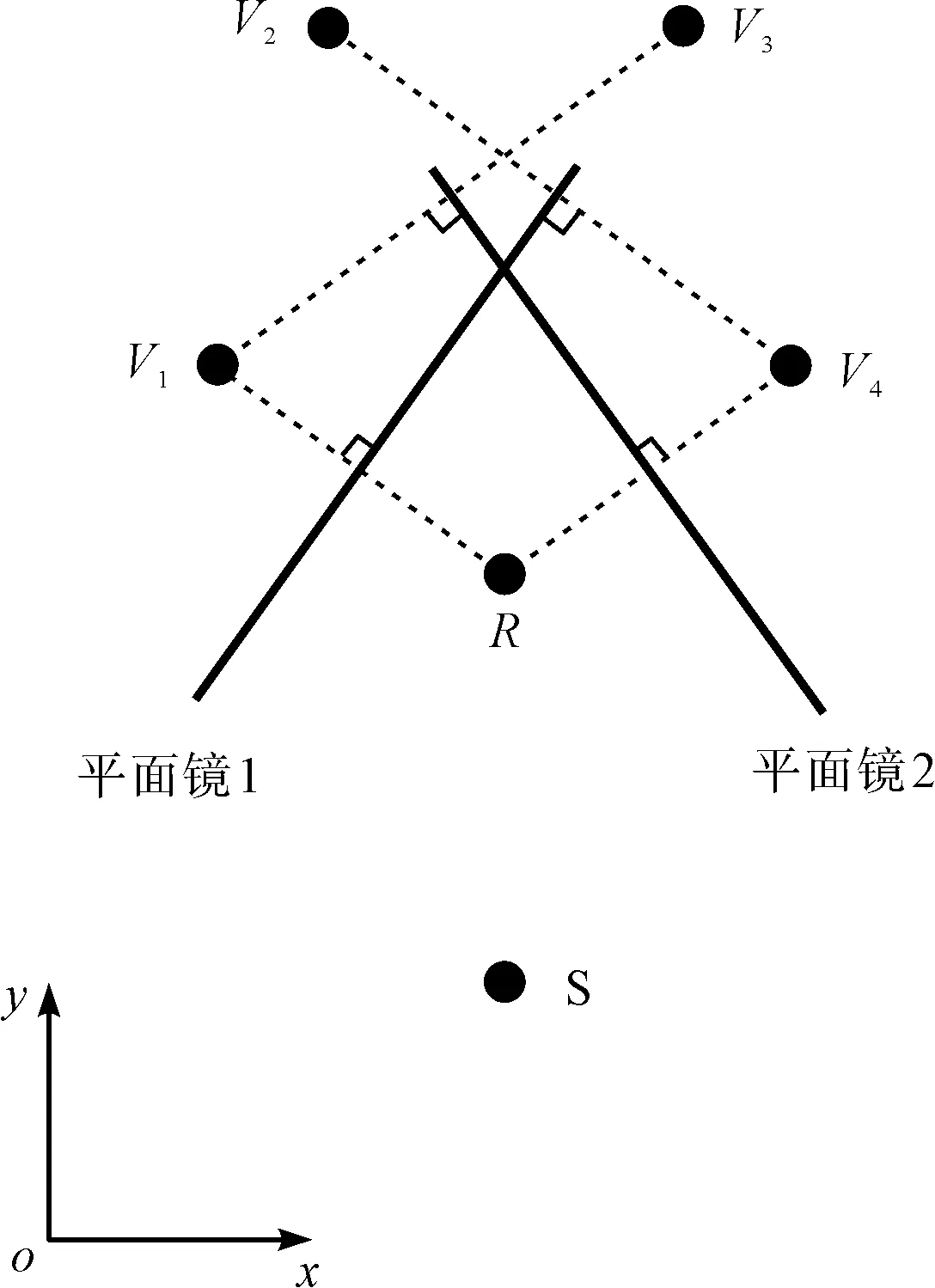
图2 多视角图像采集系统俯视图
由于相机S对5个像在空间上距离远近不同,5个像呈现“近大远小”的关系。在图像上,V1、V2、V3和V4相对R有不同程度缩小,采集到的多视角图像如图3所示。
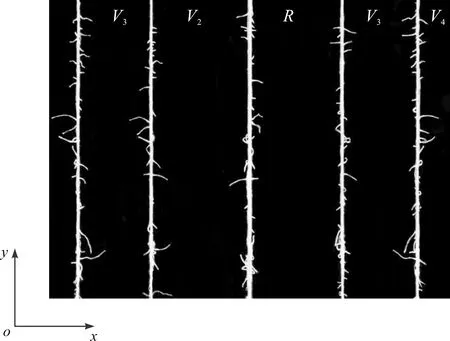
图3 多视角纱线图像
2 纱线三维建模
采用马运娇等[12]的校准方法,以确定高度和宽度方向的缩放比,对四个虚像进行校准,将V1、V2、V3和V4放大到与R同比例尺寸。各视图尺寸缩小倍数如表1所示。
为了兼顾检测效率和精度,毛羽和条干分别做分割处理。首先,对整个图像进行大津阈值处理[13]获得二值图像;接着,用形态学方法去除二值图像中的毛羽,通过提取每个视图的最大连通面积,获得纱线条干图像;再通过像素对比检测纱线条干的边缘,构建纱线主体条干的二值图像。将纱线主体条干部分设置为与背景相同的黑色,对图3中剩下的毛羽部分进行提取,采用动态阈值方法,把图像分为若干个7×7的子窗口,在子窗口获取的阈值基础上利用大津算法,测量每个子窗口中除纱线条干像素外其他像素的阈值,从背景中提取出纱线毛羽。将纱线条干部分和纱线毛羽部分的二值图相加,即得到纱线整体轮廓的二值图,经图像处理后的二值图像如图4所示。
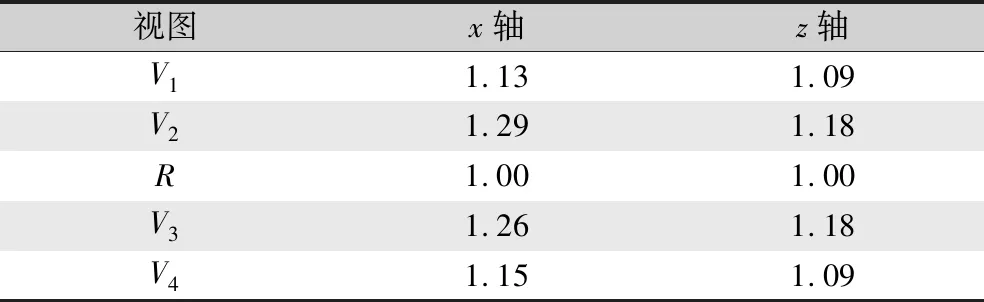
表1 各视图尺寸缩小倍率
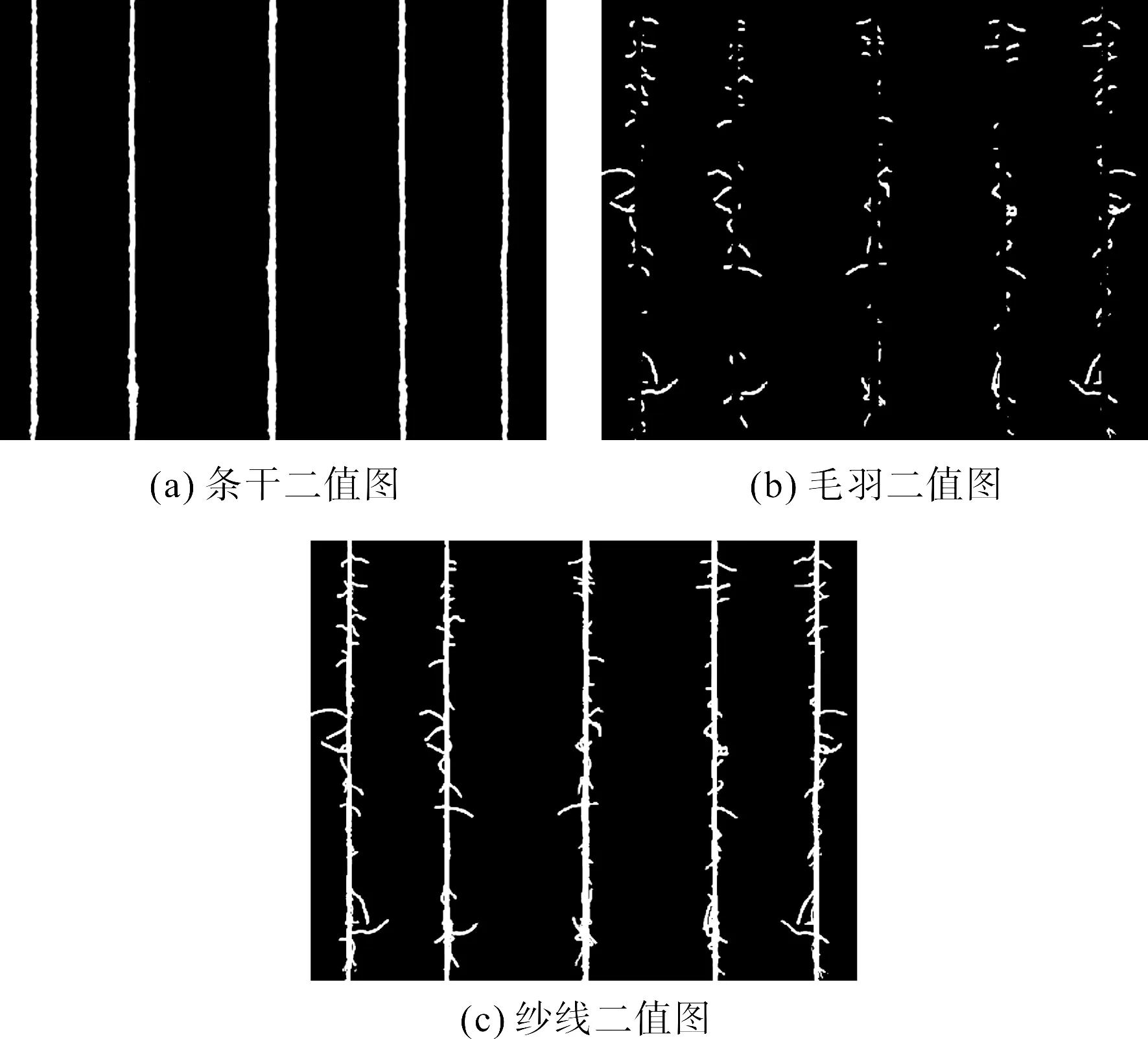
图4 二值图像
本文采用Wang等[14]的轮廓变换方法进行纱线的三维合成,利用双平面镜单摄像机立体视觉系统光路结构的几何原理及在已知相机焦距、双平面镜交线与纱线距离、相机与纱线距离,获取图像上各像中心位置的基础上,4个虚像的轮廓平面按照光路结构投射于实像处,得到4个虚像在实像上的变换轮廓平面,将多视角图像上各视图的像素沿着垂直于各变换轮廓平面的方向展开,合并5个轮廓的重叠部分形成纱线模型轮廓,轮廓变换如图5所示。其中,VS1、VS2、VS3、VS4和RS分别为从相机处观测到的4个虚像和实像的轮廓平面,VS1′、VS2′、VS3′、VS4′为4个虚像的变换轮廓平面。
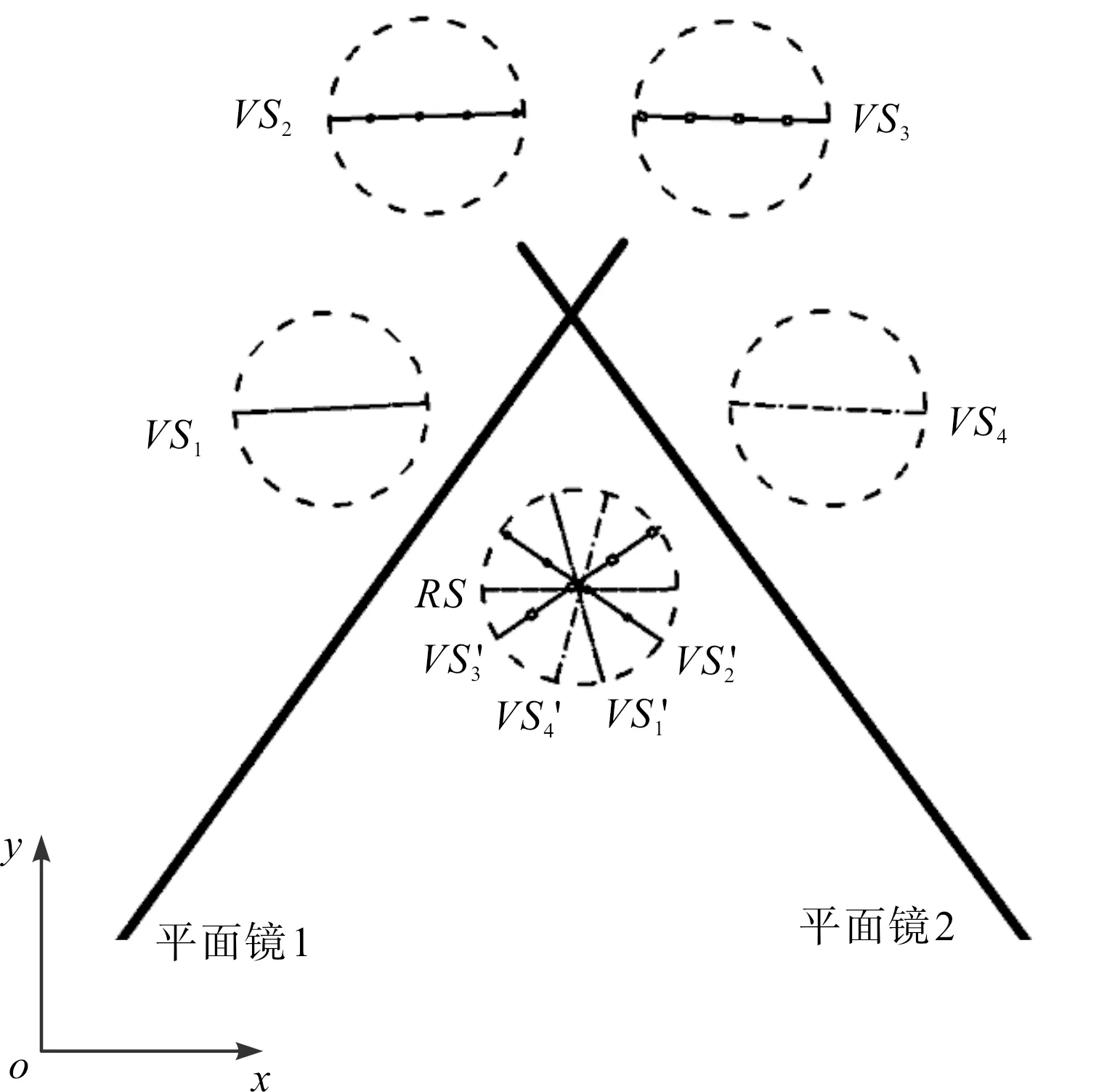
图5 轮廓变换示意
计算像素在三维坐标系中的坐标,得到配准后的三维点云,合成纱线三维模型。对点云数据按照z坐标进行排序,序列位图以每个z坐标值编号,将所有z坐标值等于该值的点在位图中标记为白色,其余点标记为黑色。然后,根据点云数据的x和y坐标范围,生成序列位图。最后,将每个位图保存为BMP文件,加载到ImageJ的开源软件中,即可重建任意角度旋转、缩放的三维图,合成效果如图6(a)所示。
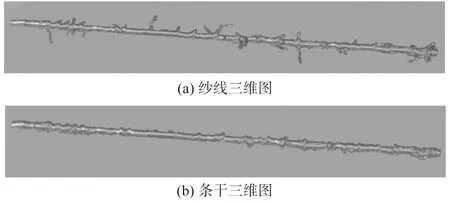
图6 三维图
由于本文三维合成以条干中心为基准,不能直接获取毛羽的三维点云,需对纱线三维点云和条干三维点云进行处理,以获取毛羽的三维点云。采用同样方法对条干进行三维合成,获取条干三维图,合成效果如图6(b)所示。
3 毛羽三维长度测量
3.1 三维毛羽去噪处理
前文采用圆盘型结构元素对多视角图像进行形态学处理,去除二值图像中的毛羽,获得纱线条干图像。结构元素的大小和形状不可能与图像边缘完全匹配,条干边缘难以避免毛刺或缺口的出现,难以区分条干或毛羽。因此,合并纱线三维点云和条干三维点云中不重复的点,得到具有条干噪点的毛羽如图7(a)所示。
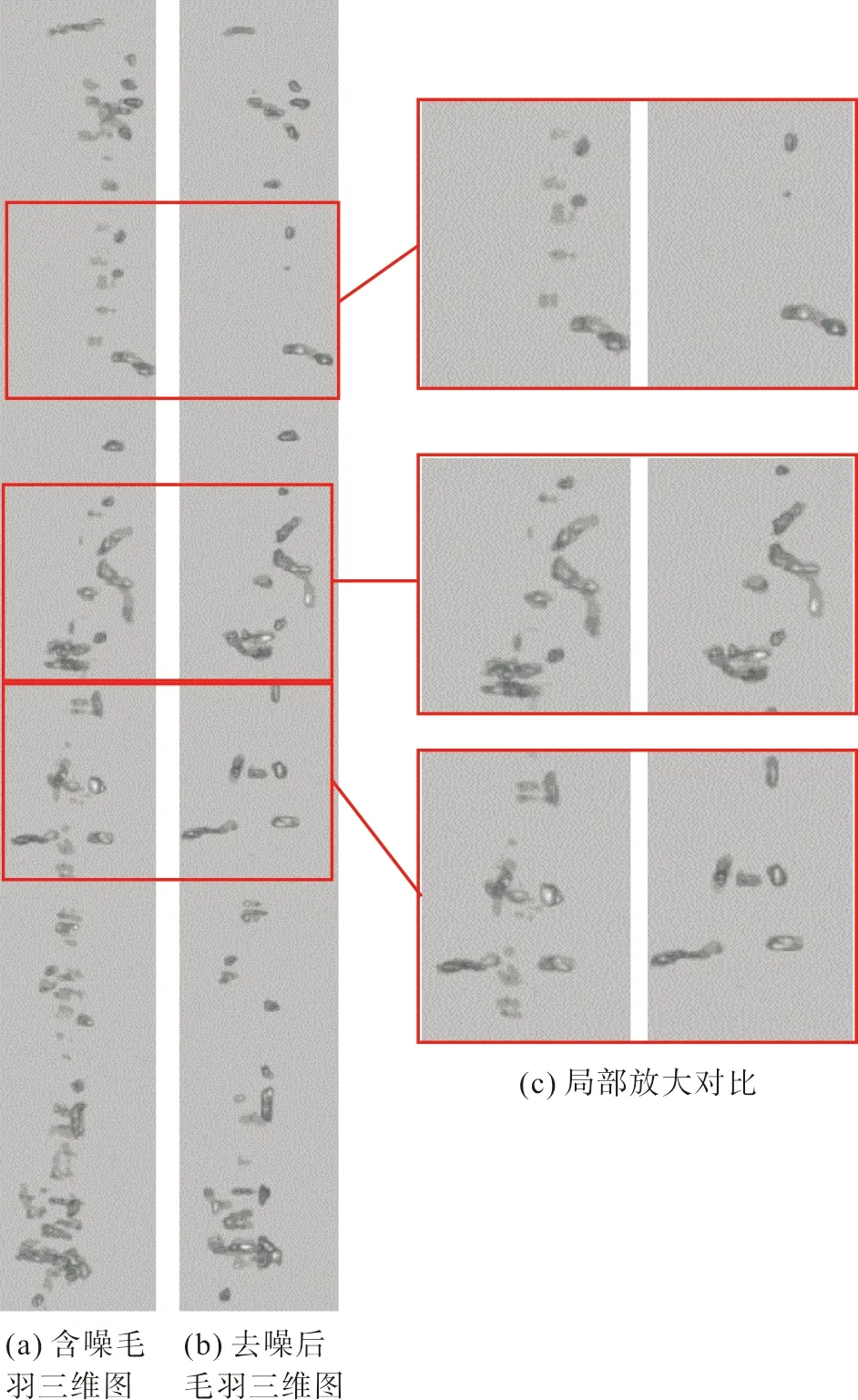
图7 毛羽去噪前后对比
本文采用基于统计原理的滤波方法对毛羽三维点云去除条干噪点。通过对点云数据进行统计分析和局部结构分析,在实现毛羽点云噪点去除的同时保证毛羽点云结构的完整性。
首先遍历点云的每个点(xi,yi,zi),找到给定的距离阈值Td内的近邻点集合Ni,计算每个点(xi,yi,zi)到其近邻点(xj,yj,zj)的平均距离davg(i)和标准差dstd(i),公式如下:
(1)
(2)
式中:d(i,j)表示点(xi,yi,zi)和点(xj,yj,zj)之间的欧氏距离,Ni表示点i的近邻点数量。
如果点(xi,yi,zi)和点(xj,yj,zj)之间的欧拉距离大于离散度阈值TT,则其为噪声点,公式如下:
TT=davg(i)+α×dstd(i)
(3)
式中:α为标准差倍数,用于调整离散度阈值TT。
经处理,本文距离阈值Td内的近邻点数量介于10~30,离散度阈值TT介于0~1,通过二分法确定近邻点数量为22,离散度阈值TT为0.1时,去噪效果最佳。经去噪后毛羽如图7(b)所示,局部放大对比如图7(c)所示。
3.2 三维毛羽细化
基于图像法的纱线毛羽长度测量研究中,毛羽的径向宽度会影响长度的计算,需对其进行细化处理。
由点云数据位图观察及预实验,本文选用DBSCAN算法对每一z坐标下的点云进行二维聚类,基于邻域半径ε和最小邻域数目minpts,得到基于系列z平面的毛羽细化点。
循环处理每一相同z坐标值下的点云,获取此z坐标下所有毛羽点云的坐标信息,对其进行二维DBSCAN聚类处理,初始化聚类标签,设定邻域半径ε和最小邻域数目minpts,对每个点找到其在邻域半径ε内的所有邻域点,形成一个邻域,如果某个点邻域内点的数量大于等于最小邻域数目minpts,则将该数据点标记为核心点。对于核心点,如果存在一条由邻域内的核心点组成的路径,可以连接两个核心点,并且路径上每个点的邻域都包含在ε邻域内,那么这两个核心点是密度可达的。根据密度可达关系,将核心点组合到一个聚类中,将具有相同聚类标签的核心点视为同一个聚类。对于不是核心点,但在某个核心点的ε邻域内的点被标记为边界点,它们可能属于某个聚类,也可能是噪声点。
本文最小邻域数目minpts设置为1,因为毛羽在某些z坐标值下可能为单一孤立点,将最小邻域数目增大会损失毛羽信息,但将最小邻域数目minpts设置为1,在聚类时无法剔除离群点即噪点。经统计滤波后的噪点数量较少且大多为孤立点,因为毛羽连续及空间形态的相对有序性,这些噪点不会影响毛羽路径规划及长度计算。通过人工聚类与聚类算法聚类236张位图,邻域半径ε设置为3.1时,聚类结果与人工聚类结果相比误差最小,误差率为4.24%。
对每一聚类求其中心的三维坐标并取整,即得到对应的毛羽细化点。毛羽细化前后对比如图8所示。
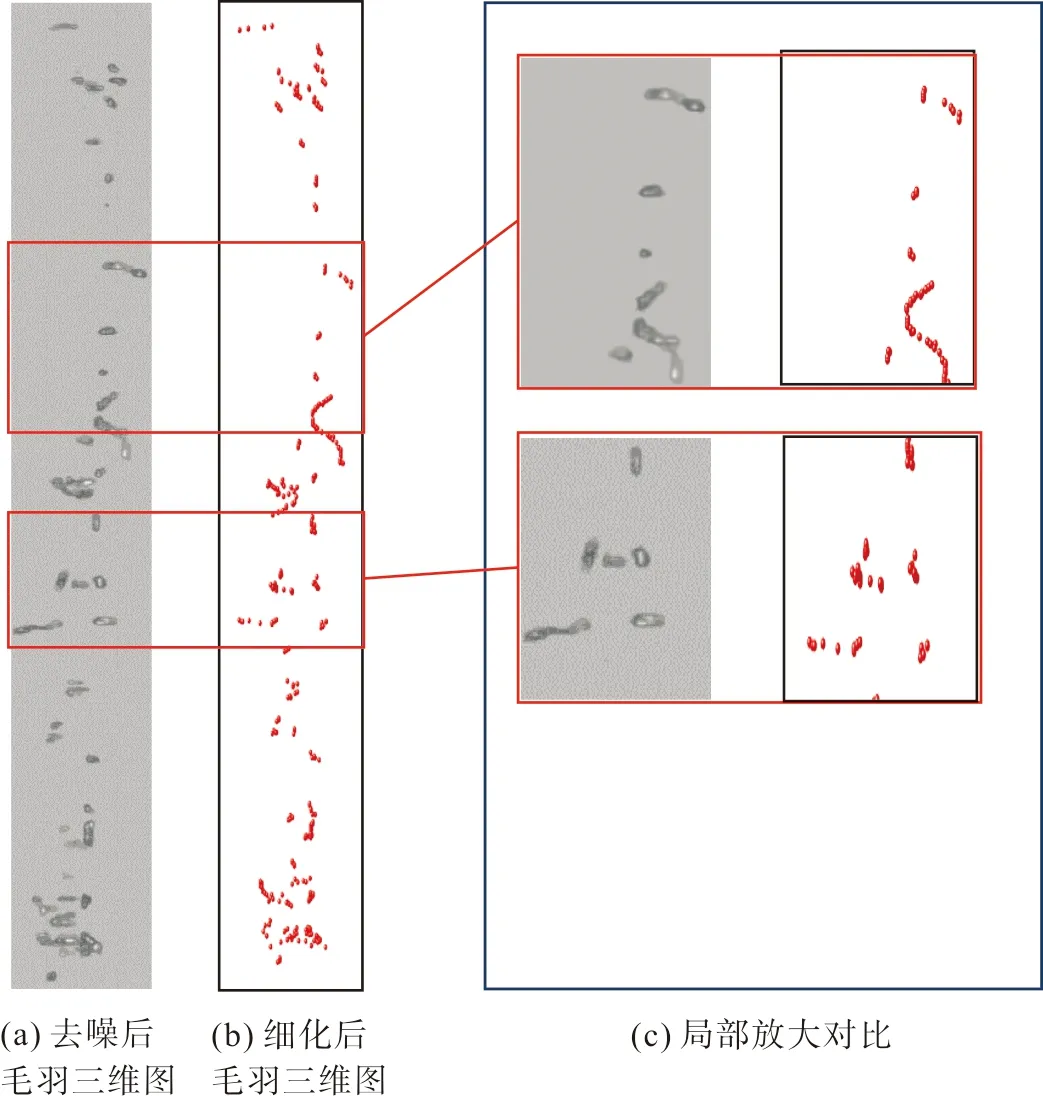
图8 毛羽细化前后对比
3.3 毛羽长度测量
三维毛羽细化后得到所有毛羽的三维细化点,将同一根毛羽的细化点归为一组,以统计毛羽根数,计算毛羽长度。
基于前文毛羽三维细化方法,结合纱线条干数据,确定各根毛羽起点。获取去噪毛羽点云的z值,然后计算每一z值下条干在x、y方向的范围,并对这一z值下毛羽点云执行DBSCAN聚类,再计算各毛羽聚类在x、y方向的范围,如果条干范围与各毛羽聚类范围在x方向或y方向差值≤1,则条干与聚类相连。
因毛羽具有径向宽度,相邻几个z方向上会连续出现条干与聚类相连的情况,且毛羽具有方向延伸性,在毛羽起点后的一定范围远离纱线条干。若条干与毛羽聚类相连,计算条干和相应毛羽聚类的中心坐标。并将所有毛羽聚类中心坐标中,z值连续的点放入同一组中,计算各毛羽聚类点与其对应条干中心的距离,距离最小的毛羽聚类中心点为毛羽起点。毛羽起点判断流程图如图9所示。
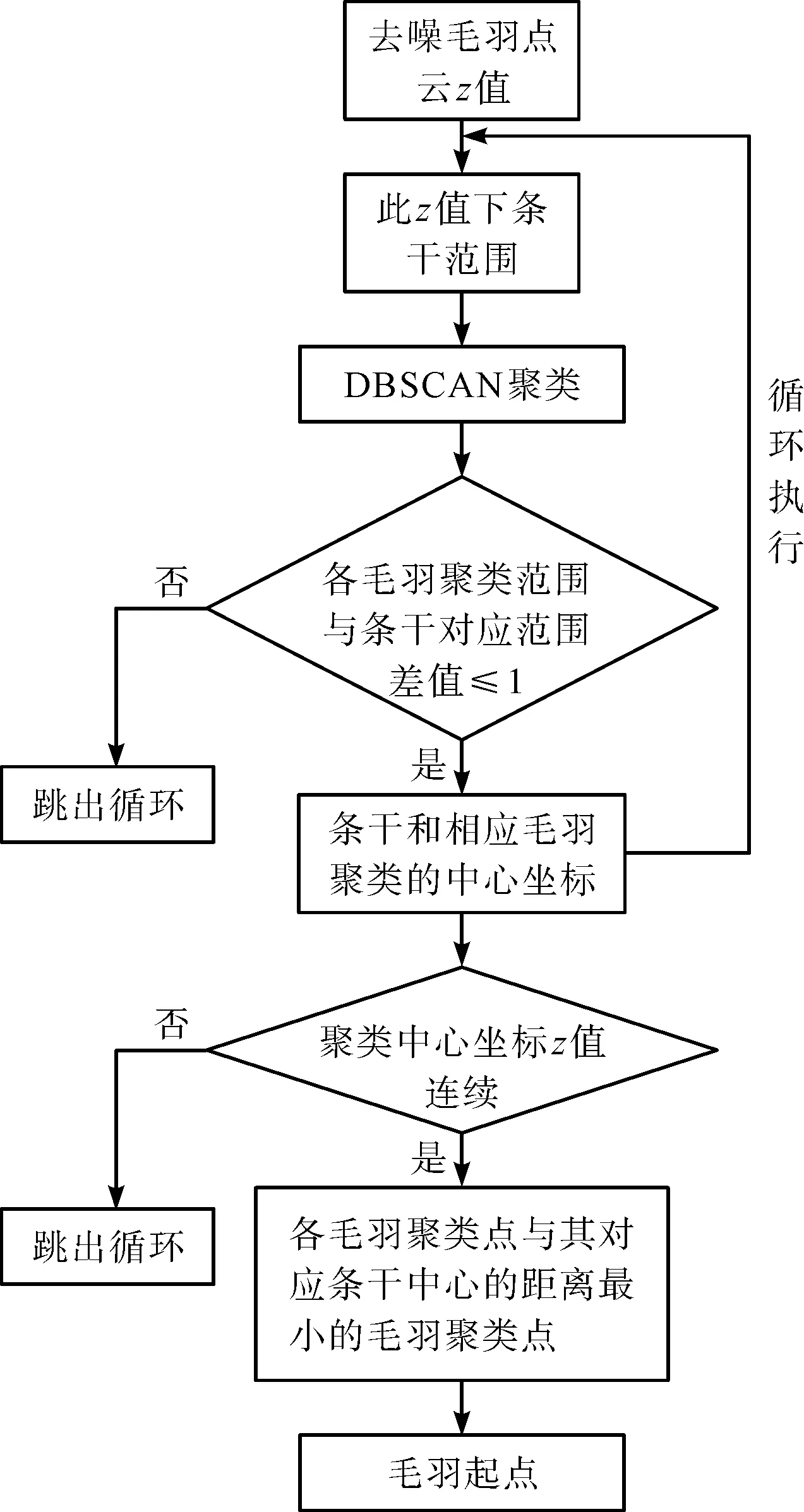
图9 毛羽起点流程示意
根据毛羽起点坐标,依次遍历,将同一根毛羽的细化点归为一组,再计算每一组中相邻三维毛羽细化点的欧拉距离并依次累加,通过像素值与实际距离的转换即可计算出毛羽长度,完成毛羽测量。
4 结果与分析
本文纱线外观三维检测装置使用相机型号为大恒MER2-231-41GM(中国大恒(集团)有限公司)与镜头型号为ML-MC25HR(茉丽特科技有限公司)的图像传感器进行图像采集。实验设备计算机(小米科技责任有限公司)硬件CPU为Intel i5-11320H,主频为3.2 GHz,内存为16 GB,硬盘规格为512 GB,实验编程工具为Matlab R2022a。
在温度为(20±2) ℃、相对湿度为(65±2)%的标准环境下,对表2中纱线样品进行测试。
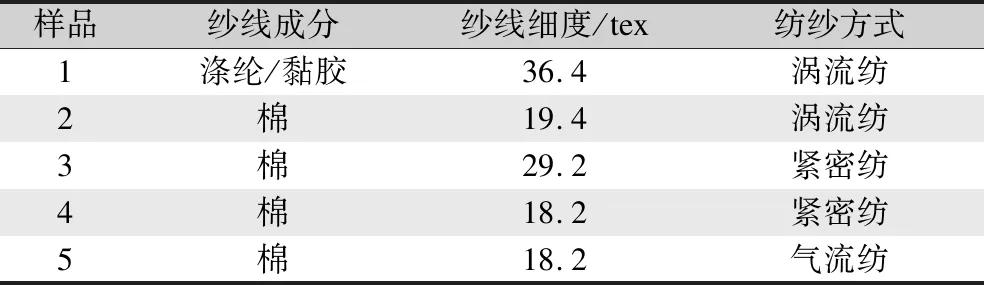
表2 纱线样品信息
将本文方法与标准FZ/T 01086—2020《纺织品 纱线毛羽测定方法 投影计数法》测试结果、USTER®TESTER5条干测试仪测试结果及ZweigleHL400毛羽测试仪测试结果进行对比。
本文每个纱线样品采集图像大小为1 920像素×1 200像素,截取每张图片中间610行,取37张图片,纱线实际长度约为1 m,统计毛羽根数及长度,测5次取平均值。计算毛羽H值并将其转换为长度为1 m纱线上的毛羽根数分布。
USTER®TESTER5条干测试仪测试每种纱线样品长度为100 m,得到毛羽H值,测5次取平均值。
ZweigleHL400毛羽测试仪测试每种纱线样品长度为100 m,得到毛羽根数分布,测5次取平均值。并将其转换为长度为1 m纱线上的毛羽根数分布。
标准FZ/T 01086—2020《纺织品 纱线毛羽测定方法 投影计数法》每个纱线样品长度为10 m,统计毛羽根数分布,测5次取平均值。并将其转换为长度为1 m纱线上的毛羽根数分布。
4.1 与USTER®TESTER5条干测试仪结果对比
将本文方法测得的毛羽数据转换为毛羽H值,与USTER®TESTER5条干测试仪结果进行对比,如表3所示。
本方法与USTER®TESTER5条干测试仪测得的5种纱线样品中,样品4的毛羽H值最大,样品5的毛羽H值最小,测试结果具有一致性,本方法测得的5种纱线样品的毛羽H值均大于USTER®TESTER5条干测试仪毛羽H值。由于USTER®TESTER5条干测试仪存在检测盲区,难以检测到纱线毛羽的全部信息,因此其结果比本方法测得的毛羽H值小。

表3 本方法与USTER®TESTER5条干测试仪结果
4.2 与标准FZ/T 01086—2020和ZweigleHL400毛羽测试仪结果对比
将本文方法测得的毛羽数据与ZweigleHL400毛羽测试仪的数据和标准FZ/T 01086—2020《纺织品 纱线毛羽测定方法 投影计数法》测试数据进行比较,如表4所示。本方法测得的5种纱线样品3 mm及以上的长毛羽数量均比标准FZ/T 01086—2020和ZweigleHL400毛羽测试仪的结果多,其中测得的纱线样品3,本方法3 mm及以上的长毛羽数量比标准FZ/T 01086—2020和ZweigleHL400毛羽测试仪的结果分别多54根/m和75根/m,因为标准FZ/T 01086—2020和ZweigleHL400毛羽测试仪测试的是毛羽的投影长度,而长毛羽多为弯曲形态,本文方法的检测结果更全面。

表4 本方法与标准及ZweigleHL400毛羽测试仪结果
5 结 论
本文提出了一种基于多视角图像的纱线三维建模及毛羽长度测量方法,通过多视角图像采集装置获取多视角纱线图像,构建纱线及条干三维模型,获取毛羽的三维点云。采用基于统计滤波原理的方法对毛羽三维点云去除条干噪点,再对每一z坐标下的毛羽点云进行二维DBSCAN聚类处理,对每一聚类求其中心的三维坐标,即得到对应的毛羽细化点。基于毛羽三维细化方法,结合纱线条干数据,确定各根毛羽起点,依次遍历,将同一根毛羽的细化点归为一个集合,则确定毛羽根数,再计算每一集合中三维毛羽细化点的欧拉距离并依次累加,并通过像素值与实际距离的转换即可计算出毛羽长度,完成毛羽测量。实验结果表明:1) 本方法能够准确获取纱线三维信息,实现毛羽长度的精确测量;2) 本方法相较于USTER®TESTER5条干测试仪及ZweigleHL400毛羽测试仪能更加全面准确地获得毛羽信息,具有一定的实际意义;3) 在后续的研究中,将优化毛羽细化点三维路径规划和毛羽长度计算的方法。

《丝绸》官网下载

中国知网下载
