基于演化博弈的生产作业现场工人安全纽带缔结的驱动机制研究
2023-11-06吴春林翟峰羽赵墨非
吴春林, 杨 洋, 翟峰羽, 赵墨非
(1.北京航空航天大学 经济管理学院,北京 100191; 2.东北财经大学 投资工程管理学院,辽宁 大连 116023)
0 引言
安全是人类最基本的需求,社会经济发展和追求美好生活必须以安全为前提。习近平总书记强调,人命关天,发展绝不能以牺牲人的生命为代价。目前,我国安全生产形势依然严峻复杂, 2020年全国生产安全事故3.8万余起,死亡人数高达2.74万余人[1]。作为最危险的行业之一,建筑业每年都有近4000人死于施工现场[1]。受个体先天差异、岗位角色差异、组织环境差异等影响,工人不安全行为在现场具有极为多样、动态且复杂的表现,一直是事故防控体系最薄弱的环节[2],对于科学研究还是安全管理实践都是根本性难题。
传统上,改进作业现场工人安全状况的最直接思路是加强管理,通过制定严格的规章制度,禁止工人的不安全行为[3-6]。这一思路属于“自上而下”,通过法规约束,实现“要工人安全”;但很显然,对工人的约束规则制定不同于对自动机器(Automata)的规则设定,工人会自主进行决策,决定是否遵守法规约束,是完全遵守还是打折扣地遵守,因此,考虑工人的决策偏好,激发工人产生“我要安全”的主观意愿尤为重要。事实上,近年来一批文献发现:与硬性安全规章相比,工人对同一作业小组内班组长、工友等相似层级人员的安全提醒、指导和沟通有更高的接受度[7],当工人面临安全问题或身处险境时,可以倚赖同组工友保护自己免受伤害。TRÖSTER等[8]研究将工人间的个体纽带引入考虑,假设作业现场人员之间存在两种纽带关系,工作型纽带单纯是以工作为目的而产生的信息传递和人际互动,不依赖于双方的情感和友谊基础,可以为单向关系,也可以为双向关系;而友谊型纽带可以为个体提供社会和情感支持,其形成依赖于双方的互惠和积极反馈,必须为双向关系。根据社会交换理论,在接受他人帮助后,工人也会主动帮助他人,如向工友传递有价值的安全信息、传授安全知识与技能、提醒身处险境的工友注意安全等,这些无形的安全纽带实现了人员的互帮互惠,从而及时、全面地控制现场安全隐患,防范安全事故[7]。本文即从工人自主结成安全纽带的策略性问题出发,研究其对作业安全的影响。
本文采用演化博弈方法刻画作业现场工人的动态安全交互关系。工人个体具备有限理性,根据自身需求和未来损益预期而调整行为策略、追求个体利益改善、并依据过去与工友的多次交互博弈的结果,来缓慢调整自身是否发起安全交互的决策倾向性和概率,直至纽带稳定,这些特征较好地对作业现场工人的决策环境进行了概括[9-12]。尤其值得注意的是,工人间缔结友谊型纽带对工人的收益具有超模性[13],即友谊型纽带的缔结会导致工人双方收益的增多,且增多的额外收益具有不确定性,该种额外收益能在模型中发挥“引力点”的作用,吸引并驱动工人双方通过发起安全交互而缔结友谊型纽带以获得更多的收益,进一步地,影响工人双方最终作出的决策。
此外,生产安全不同于其他管理学问题。在演化博弈过程中,安全纽带的缔结通常依赖于反复尝试过程中的损益的激励和引导。然而“安全无小事”,每一次损益的实现都可能带来财产乃至生命的代价。因此,对缔结安全纽带的演化博弈系统而言,重要的不仅是演化结果,还有演化速率。本文从微观视角寻找驱动系统加速演化至理想状态的关键因素,使系统在短时间内到达稳定点。
综上所述,本文运用演化博弈方法分析作业现场工人间安全纽带的缔结机理及促使该过程快速进行的方法,以促使工人“要我安全”向“我要安全”的意愿转变,解决作业现场工人不安全行为的治理问题。
1 作业现场工人安全交互演化博弈模型构建
本文考察任意一对作业现场工人,并对双方的策略和收益进行如下假设和说明:
(1)工人间安全行为的发起的博弈中,将博弈双方工人分别记为工人A和工人B。工人有两种策略,即可以选择发起安全交互(I)或不发起安全交互(NI)。双方基于有限理性,在博弈过程中不断学习进而调整策略,直至形成稳定策略。
(2)若工人A和工人B不与彼此发生安全交互,在对方有困难(陷入安全险境、遭受安全隐患)时也不提供任何帮助,则双方不缔结任何安全纽带,双方的安全意识和安全知识也不会得到有效提升,记双方此时收益为0。
(3)当工人单方发起安全交互,如:工人A主动向工人B发起安全交互,工作型纽带便会缔结。工人A的利他行为有一定概率(P1)被领导识别,并获得奖励R1(R1≥0),受协助的工人B以提升自身安全意识和安全知识,获得收益R2(不论是否被领导识别)。此外,对于博弈双方均发起安全交互,设置参数Q(Q≤1),用以区分在博弈中因双方发起先后或发起情况不同导致R1不同(例如,当A先发起,可设置Q1=0.9,Q2=0.8;当只有一方发起时Q=1)。
(4)由于双方的主观性格因素(SPF)、双方对组织的归属感(SOB)等的差异,使得友谊型纽带无法在每一次共同发起安全交互时都能形成,因此假设友谊型纽带缔结的概率为P3。
(5)工人主动与别人发生安全交互需消耗成本,如时间成本、精力成本以及潜在的事故风险,假设该成本为C。根据以上假设,在不同策略组合条件下,工人收益矩阵如表1所示。
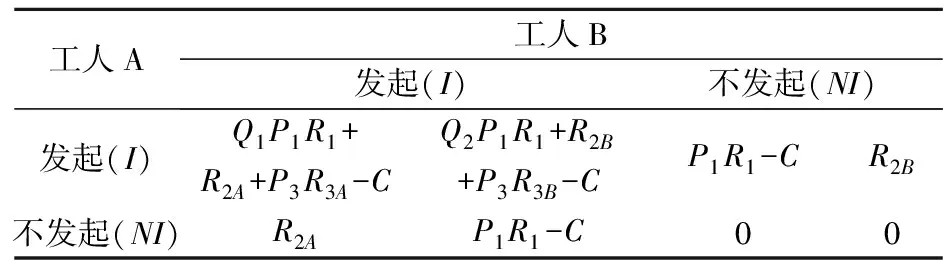
表1 演化博弈支付矩阵
2 演化博弈分析
2.1 复制动态方程与系统演化平衡点的求解
假设作业现场工人A采取发起(I)策略的比例记为x(0≤x≤1),则采取不发起(NI)比例的概率为1-x;同时,假设作业现场工人B采取发起(I)策略的比例为y(0≤y≤1),采取不发起(NI)策略的比例为1-y。
根据表1所示的博弈支付矩阵,当工人A选择发起(I)策略时,其获得的期望收益为:
U1A=y(Q1P1R1+R2A+P3R3A-C)+(1-y)(P1R1-C)
(1)
当工人A选择不发起(NI)策略时,其获得的期望收益为:
U2A=yR2A
(2)
因此,工人A在上述两个策略条件下的综合期望收益为:
(3)
同理,可以得到工人B采取发起(I)策略时的期望收益为:
U1B=x(Q2P1R1+R2B+P3R3B-C)+
(1-x)(P1R1-C)
(4)
工人B采取不发起(NI)策略的期望收益为:
U2B=xR2B
(5)
综上,工人B在上述两个策略条件下的综合期望收益为:
(6)

=x(1-x)[y(Q1P1R1+P1R3A-
P1R1)+P1R1-C]
(7)
同理,设M(y)表示工人B采取发起(I)策略的概率的变化率,工人B采取发起(I)策略的复制动态方程为:
=y(1-y)[x(Q2P1R1+P3R3B-
P1R1)+P1R1-C]
(8)
工人A和工人B的安全交互可由微分方程构成的二维动态系统描述,具体如式(9)所示:
(9)
由微分方程稳定性理论[15]可知,复制动态方程稳定点是其零点处一阶导数小于0的点,即需满足:
{dF(x)/dx≤0|F(x)=0,x∈[0,1]}
(10)
因此,令F(x)=0,可解得x=0,x=1或x0=(P1R1-C)/[(1-Q2)P1R1-P3R3B] ;同理,令M(y)=0,可解得y=0,y=1或y0=(P1R1-C)/[(1-Q1)P1R1-P3R3A] ,因此,系统的平衡点为E1(0,0),E2(0,1),E3(1,0),E4(1,1),E5(x0,y0)。且当(1-Q2)P1R1-P3R3B
2.2 演化平衡点稳定性分析
根据FRIEDMAN[9]提出的方法,对于由微分方程系统描述的动态博弈过程,平衡点的稳定性和演化稳定点,可由该动力系统的雅可比矩阵的局部稳定性分析得出。为了分析在不同参数条件下平衡点的稳定情况,设置三个条件。条件一:P1R1-C<0;条件二:Q1P1R1+P3R3A-C<0;条件三:Q1P1R1+P3R3B-C<0。三个条件的满足与否,会产生8种不同情景,且每种情景对应一种可能成立的稳定点组合。可根据雅克比矩阵的稳定性来验证这些点组合是否为双方最终达成的演化稳定策略。对x′,y′分别关于x,y求偏导数,相应的雅可比矩阵为:
(11)
记行列式为detJ,矩阵的迹为trJ,由FREIDMAN提出的方法可知:只有当detJ>0,trJ<0时,策略为演化稳定策略[9]。将4个平衡点代入雅克比矩阵,如表2所示。

表2 系统演化稳定性表征
由表2可进一步得到博弈双方不同条件下的平衡点组合,归纳于命题1中。
命题1系统均衡收敛的情形如下:
a.如果P1R1-C<0,Q1P1R1+P3R3A-C<0且Q1P1R1+P3R3B-C<0,仅有平衡点(0,0)。
b.如果P1R1-C<0,Q1P1R1+P3R3A-C<0且Q1P1R1+P3R3B-C>0,仅有平衡点(0,0)。
c.如果P1R1-C<0,Q1P1R1+P3R3A-C>0且Q1P1R1+P3R3B-C<0,仅有平衡点(0,0)。
d.如果P1R1-C<0,Q1P1R1+R3R3A-C>0且,Q1P1R1+P3R3B-C>0,系统有平衡点(0,0)与(1,1)。
e.如果P1R1-C>0,Q1P1R1+P3R3A-C<0且Q1P1R1-C<0,系统有平衡点(0,1)与(1,0)。
f.如果P1R1-C>0,Q1P1R1+P3R3A-C<0且Q1P1R1+P3R3B-C>0,仅有平衡点(0,1)。
g.如果P1R1-C>0,Q1P1R1+P3R3A-C>0且Q1P1R1+P3R3B-C<0,仅有平衡点(1,0)。
h.如果P1R1-C>0,Q1P1R1+P3R3A-C>0且Q1P1R1+P3R3B-C>0,仅有平衡点(1,1)。
以子命题a为例,当条件一、二、三均满足,即P1R1-C<0,Q1P1R1+P3R3A-C<0且Q1P1R1+P3R3B-C<0,将该三式带入表2中可计算得到(P1R1-C)2>0,且2(P1R1-C)<0,由FRIEDMAN[9]提出的判定定理可知,该条件下(0,0)点对应的行列式的值detJ>0且迹trJ<0,可判定(0,0)点为稳定点。对于(0,1)点,Q1P1R1+P3R3A-C<0且P1R1-C<0,故对应的行列式detJ=(Q1P1R1+P3R3A-C)×(C-P1R1)<0,因此(0,1)点为不稳定点。同理,Q1P1R1+P3R3B-C<0且P1R1-C<0,故(1,0)点所对应的行列式的值小于0,因此(1,0)点也不是稳定点。对于(1,1)点,由于Q1P1R1+P3R3A-C<0且Q1P1R1+P3R3B-C<0,其对应的迹小于0,因此(1,1)点也不是稳定点。同理,对于子命题b至g,将条件带入表2中,计算方法如上述过程,则命题可得到证明。
由于本文主要讨论工人的决策如何快速向双方同时发起安全策略演化(即如何快速演化至(1,1)),可发现命题1的子命题d与h中,(1,1)点均为稳定点,即博弈双方均可能演化至该点。其中h中,由于仅存在(1,1)为稳定点,因此整个系统经过一段时间的演化后,只会在(1,1)点达到稳定。对于情况d,(0,0)也是稳定点,工人的决策将会在(发起,发起)与(不发起,不发起)间演化。接下来,本文即针对d情形进行演化博弈稳定性分析。
2.3 博弈双方策略稳定性分析
当时间t不断增大时,系统中,博弈双方的策略会在多次博弈后演化至稳定。对于一个由微分方程组成的动态系统,当F′(x)<0时,且x本身是稳定状态的平衡点时,则x为博弈一方的稳定策略。根据Friedman提出的方法,可用雅克比矩阵的局部稳定性来验证双方所形成的策略组合是否为演化稳定策略(ESS),并分析影响策略选择的因素。
对于工人A:
对F(x)关于x求导,得:
F′(x)=(1-2x)[y(Q1P1R1+P3R3A-
P1R1)+P1R1-C]
(12)
当F′(x)<0时,记:
y0=(P1R1-C)/[(1-Q1)P1R1-P3R3A]
(13)
命题2当满足命题1中d情形时:
(1)当工作满意度期望值P3R3A<(1-Q1)P1R1时,工人双方会选择“不发起”策略。
(2)当工作满意度期望值P3R3A>(1-Q1)P1R1时,工人双方会选择“不发起”或“发起”策略。
(3)当工作满意度的期望值P3R3A<(1-Q1)P1R1时,因P1R1-C<0,安全投资总额固定且作业现场工人因博弈双方均发起安全交互使得工人获得的领导者的青睐和奖励减少的收益差额部分与缔结友谊型纽带所获得的收益的大小关系确定,可计算得对于∀x∈[0,1],由于存在F′(0)<0,F′(1)>0,说明此时x=0时稳定决策,即工人双方会选择“不发起”策略。
当工作满意度的期望值P3R3A>(1-Q1)P1R1时,因P1R1-C<0且Q1P1R1+P3R3A-C<0,可知对于任意一个x均有y属于一个开集,使得F′(0)<0,F′(1)>0或F′(0)>0,F′(1)<0,且临界值y=y0。说明对于不同初值的(x,y),在系统经演化后博弈双方可能会同时选择“发起”或同时选择“不发起”策略。
2.4 作业现场工人双方演化博弈结果的比较静态分析
为具体分析影响双方是否发起安全行为的因素,选择研究演化稳定点为(1,1),(0,0)时的情景,即满足命题1中子命题d的条件。
依据雅可比矩阵的稳定性分析,(1,1),(0,0)为演化稳定点组合,(1,0),(0,1)为不稳定点组合。对于点((P1R1-C)/((1-Q2)P1R1-P3R3B),(P1R1-C)/((1-Q1)P1R1-P3R3A)),其雅可比矩阵detJ<0,而trJ=0,则记其为鞍点。
对于(x0,y0)未知的情况,建立ABCM面积S1和区域面积S2的函数计算式,四边形面积即代表工人演化至某均衡点的概率,因而四边形面积表达式的参数为系统演化稳定策略的影响因素,若S2>S1,系统将朝着理想点D(1,1)演化的概率更大。即当初始条件确定时,当任意落在S2中的点(x0,y0)都会向(1,1)演化,可知初始状态在M点附近时,细微变化都会影响最终演化结果。根据演化相位图中信息可求得:

(14)

当其他参数不发生变化时,求S2关于C的导数,得到:
(15)

所以该偏导数的值小于0,即当其他参数保持不变的情况下,随着参数C的增加,四边形的面积S2会逐渐减小,博弈双方向(不发起,不发起)演化的概率增大。这说明随着工人发起安全行为的成本的增加,工人更可能会趋向于不发起安全行为。
对于其他因素,如P1,R1,Q1,Q2,P3等分析方法相同,所得结论汇总如表3所示。
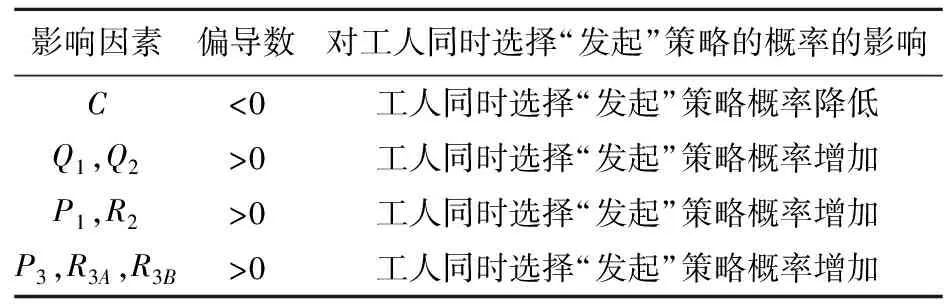
表3 双方博弈影响因素的分析结果
3 演化速率分析
演化博弈,即博弈双方基于以往经验选择相应策略。本文用t表示该系统在处于特定环境下从演化过程开始至双方演化至稳定点的整个过程所经历的时间。显然,对于同样的系统环境,若经验积累的过程越快,则演化的速率越高。而对于不同的系统环境,本文从微观视角研究演化时间t,有助于寻找加速系统演化至理想状态的关键因素,从而使系统在短时间内到达稳定状态。
为探究系统环境参数与期望时间t的关系,联立发起安全交互概率的微分方程表达式:
(16)
可通过求解该非齐次非线性微分方程组得到x与y关于时间t的表达式。对于工人A发起安全交互的比例x,设求解后表达式为x=W(t)+μ1。当t0=0时,系统处于初始未演化状态。当演化完成,工人选择发起安全交互比例x与y为1或0,即当t>t1,对于任意x和t都有x′=0,即x′=x″=0。因此,工人A发起安全交互的演化时间为系统演化完成的时刻减去系统开始演化的时刻,即t-t0,又因为t0=0,所以工人A发起安全交互的演化时间为t1。同理,工人B发起安全交互比例为y=G(t)+μ1,演化时间为t2。则整个系统的演化时间为t1与t2的较大值。由t1与t2分别对应的是W′(t)=W″(t)=0、G′(t)=G″(t)=0的解,且表达式含环境变量C,R1,Q1等,演化时间与环境变量的取值有关。
对于方程组的求解,由于其为一般非齐次非线性微分方程组,并无显示解,因此本文通过设定特定情景,利用Matlab 2018b软件对模型进行数值仿真,并进行分析。
4 演化博弈模型的仿真分析
为了定量分析各因素对系统最终演化结果以及演化速率的影响,本文使用Matlab 2018b软件对该系统进行了仿真分析。此时,博弈系统的最终稳定状态取决于博弈模型中的参数值以及双方初始发起安全交互的比例(x,y)。本文选用ode45指令求解复制动态方程、以及模拟系统的演化过程,讨论系统中参数对演化结果与速率的影响。各参数的初始值设定如表4所示,通过设定一定的系统参数初值,可得到系统演化趋势图如图1(a)-图1(d)所示。
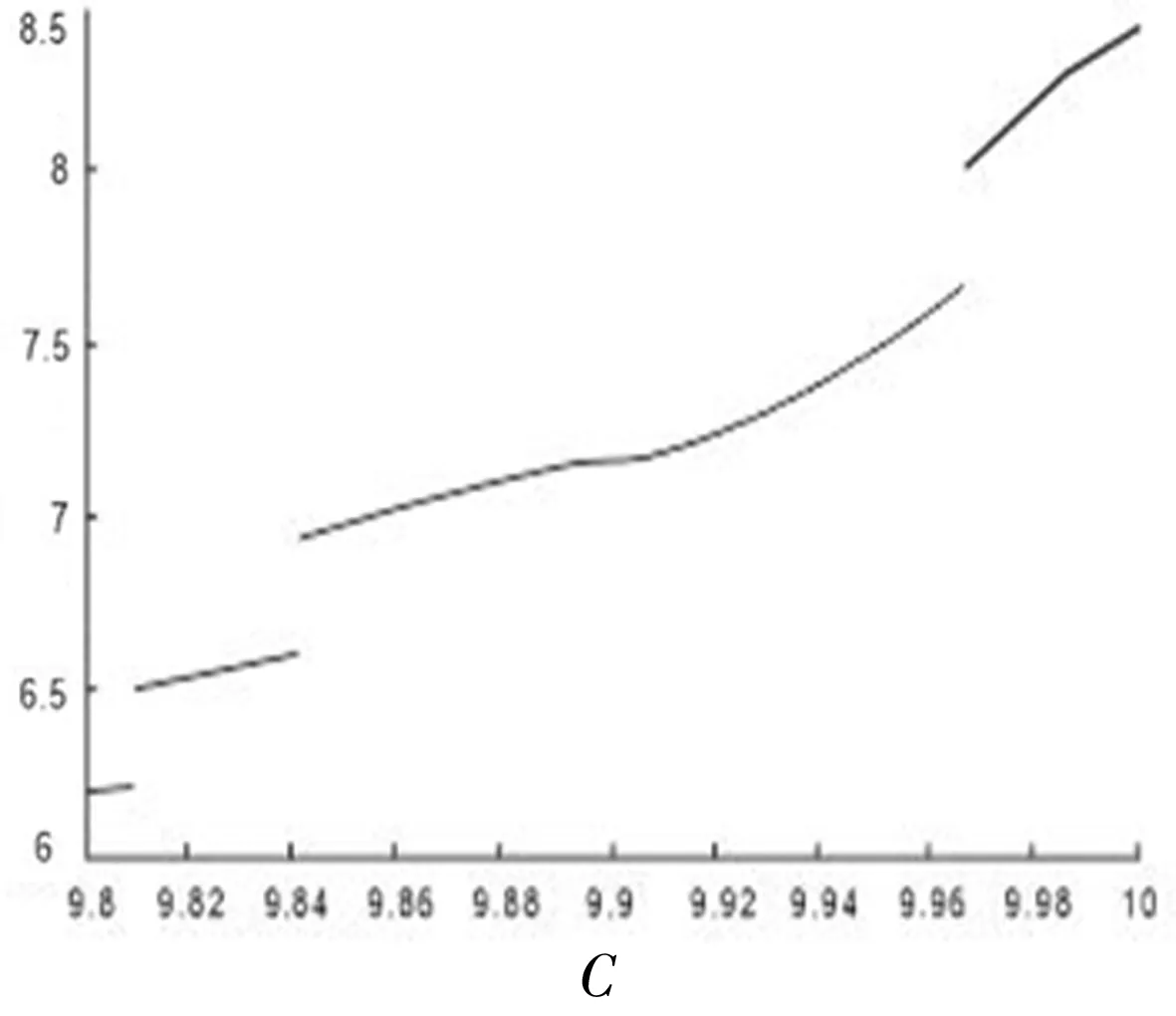
(a)发生安全交互的成本(C)的影响
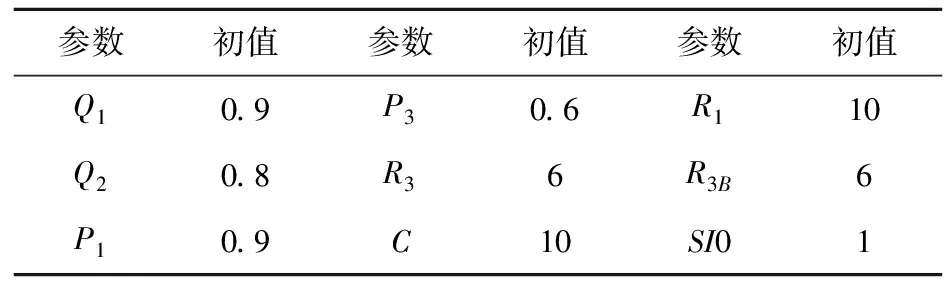
表4 参数初始化数值表
4.1 工人发起安全交互的初始比例
工人发起安全交互的初始比例是本文系统中的一个重要参数,它影响着工人是否选择发起安全交互。设置三组不同的(x,y)的初值(如表5所示),得到系统演化过程的仿真结果。结果表明了在给定参数不变的情况下,当工人发起安全交互的初始比例均等于0.5时,博弈双方的策略均最终演化至发起安全交互。由情况1、情况2与情况3相互对比可发现,若某一方工人发起安全交互的比例较低(如情况2与情况3),则博弈系统需经过更长的一段时间才能演化至博弈双方均选择发起安全交互,或演化至博弈双方均不发起安全交互。在此情况下,由于演化从起点至终点的位移发生变化,固探究期望时间t失去意义,因此本文仅探究环境参数对于期望时间的影响。

表5 三组不同(x,y)的初值
4.2 博弈系统环境参数
工人发起安全交互的成本、工人发起安全交互后得到的期望奖励、缔结安全纽带的期望收益以及收益系数均是决定工人的收益情况的关键因素,因此影响着工人发起安全交互的比例以及系统演化的速率。根据表五初值进行仿真实验的结果说明:降低工人发起安全交互的成本或提高工人发起安全交互后得到的期望奖励、缔结安全纽带的期望收益以及收益系数能促使工人的决策向发起安全交互演化,并能缩短工人双方均发起安全交互的系统的演化时间。
5 结论与建议
本文构建了作业现场工人安全纽带缔结演化博弈模型,分析了作业现场工人之间安全交互策略选择动态变化过程,发现单方发起安全交互获得的组织奖励小于发起成本,或工人双方均发起安全交互情况下获得的组织奖励小于缔结友谊型安全纽带得到的收益时,博弈双方最终演化稳定策略为(1,1),(0,0)。作业工人策略选择以及工人发起安全交互概率最终沿哪条路径演化与博弈初始状态以及博弈支付矩阵的参数密切相关。系统演化的速率与工人发起安全交互的次数正相关,且受系统环境参数初值影响。基于以上分析结论,并结合生产安全事故高发的行业工人的特点,提出如下管理建议:
(1)构建核心作业团队。为减少工人不安全行为,使工人主动发起安全交互,鼓励企业培育并建立自有核心作业工人队伍,提升工人专业技能与安全知识。并制定安全交互奖励机制,对乐于进行利他互动的工人予以专项奖励。
(2)完善职业技能培训体系。强化企业技能培训主体作用,推行终身职业技能培训制度,可统一在培育基地培训,增强组织凝聚力、归属感,提高工人们的风险感知能力,从而促进工人从情感上更愿意发起安全交互行为。
(3)健全保障薪酬支付的长效机制。聘用工人时须签订劳动合同,未订立劳动合同并实名登记的工人不得进入现场作业,推动按项目参加工伤保险,结合实名制管理,确保工伤保险覆盖作业现场所有工人,让工人感受到政府或企业对自己人身的关怀。
(4)关注并调动工人发起安全交互的主观能动性。设计用于测试工人主动发起安全交互意愿的问卷,于招聘工人时用作参考,选取更主动发起安全交互的工人,以减少不安全行为,减少安全事故的发生。同时,在作业期间定期开展工人安全交互主观能动性测验并对测验成绩优秀者给予一定奖励,以调动工人发起安全交互主观能动性。