基于有限马尔可夫链嵌入法的智慧路灯系统联合Signature计算
2023-11-06路靖雯
易 鹤, 李 想, 路靖雯
(北京化工大学 经济管理学院,北京 100029)
0 引言
随着科技的发展,装备系统逐渐呈现出大型化和复杂化特点,使得系统失效风险大为提高,系统可靠性问题开始引起人们的关注[1-3]。智慧路灯作为一种集照明设备和传感设备于一体的公共基础设施载体,能够通过各种传感器实时收集道路数据、监测道路状况,并通过照明设备实时管理汽车流量,对我国的智慧城市规划建设有重要意义[4]。智慧路灯可以根据实际应用的场景布放不同的照明模块和传感模块,以实现照明、广告 (LED屏)、广播 (音柱)、Wi-Fi、监控和报警等不同功能,而这些模块可能有不同的需求数量和覆盖范围等[5]。城市管理部门需根据不同路段的车道类型选择适合的路灯型号和铺设方式。
近年来,国内外关于智慧路灯系统的研究层出不穷,内容涉及到系统软硬件设计与实现、节能策略与控制算法、相关技术手段与实证研究等诸多方面。例如,TUNG等[6]基于Led灯和Lora无线通信技术研究了智慧路灯控制系统的开发与实现;GUPTA等[7]针对LiFi支持的智慧路灯系统设计了一种高能效的静态随机存储器单元;ARJUN等[8]调查研究了物联网在智慧路灯系统开发中的应用方式以及其中使用的各类组件。目前,研究者们已经意识到可靠性在智慧路灯系统研究中的重要性[6,9],但基于可靠性的系统建模与分析仍有较大空白。
事实上,对于某个路段上的智慧路灯系统,为研究相关可靠性问题,可将其看作共用部件的若干个线形n中取连续k型冗余系统。例如,某型号智慧路灯由照明设备和传感设备构成,这两种设备的功能覆盖范围分别为15.5米和29.5米。在一条长70米的路段上,若以10米为间距铺设8个该型号的智慧路灯,则可以近似地认为这些智慧路灯构成的照明系统失效当且仅当有至少连续3个路灯失效,而它们构成的传感系统失效当且仅当有至少连续5个路灯失效。为了更好地刻画这类系统的结构性质,本文将以共用部件的两个线形n中取连续k型冗余系统为例,给出基于有限马尔可夫链嵌入法的联合Signature计算方法。该方法用于此类系统的可靠性分析和结构比较,为道路规划的管理决策问题提供理论依据。
Signature理论是可靠性理论中用于描述系统结构的重要工具[10,11]。对于由n个独立同分布部件构成的单调关联系统,其Signature被定义为一个n维向量s=(s1,…,sn),这里元素si=P{T=Xi:n},i=1,…,n,表示第i个部件失效导致系统失效的概率[12]。该指标的提出克服了大型复杂系统结构难以刻画的问题,并给出了基于随机序的系统结构比较方法[13-15]。针对不同类型的单调关联系统,Signature指标有很多种,例如极小/大Signature、动态Signature、条件Signature、次序Signature、累积Signature和尾Signature等。本文要讨论的是针对共用部件的两个单调关联系统提出的联合Signature[16]。
指标计算问题一直是Signature领域研究的热点和难点,现有方法包括定义法、路/割集法、可靠度法、二元决策图法、生成函数法、马氏过程法和模块分解法等,这些方法各有优劣和适用范围[17-19]。其中,可靠度法利用Signature和系统可靠度一一对应的性质,将Signature计算问题转化为可靠度计算问题,其计算效率取决于可靠度计算方法的效率。通过这样的问题转化,可靠度函数中包含的信息被分解成了系统结构信息(Signature)和部件寿命分布信息,此前不能由可靠度函数直接求得的一些量(如已知失效部件数时的系统剩余寿命分布等)也变得容易求解。对于本文中要研究的共用部件的线形n中取连续k型冗余系统而言,使用传统的定义法计算这两个系统的联合Signature需要分别考虑n!种部件失效顺序下系统状态的变化过程,当n较大时计算效率非常低。因此,本文将给出一种基于有限马尔可夫链嵌入法的联合Signature计算方法。该方法的思想是先用有限马尔可夫链嵌入法求出系统的联合可靠度函数,再根据联合Signature与联合可靠度函数的关系计算出联合Signature。
有限马尔可夫链嵌入法[20,21]是一种将可靠性问题转化为有限状态马尔可夫链的方法,其核心思想是通过巧妙的状态定义和依次添加部件来生成特定的状态转移规律。由于在系统可靠性计算方面优势突出且有着统一的解析表达式,该方法被广泛应用于可靠度计算[22],特别是用于线形/圈形n中取连续k型冗余系统[23,24]及其衍生系统[25-27]的可靠度计算。近年来,除了常见的n中取k的F系统和G系统以及n中取(m个)(含稀疏d的)连续k的F系统和G系统之外,该方法还被用于许多其他n中取连续k型冗余系统的可靠度计算等[28,29]。当n非常大时,该方法还可以通过特征值分解简化计算,因此用来计算可靠度指标时有较高的效率。
综上,本文以共用部件的线形n中取连续k型冗余系统模型来研究智慧路灯系统的可靠性问题,并基于有限马尔可夫链嵌入法,给出了计算其联合Signature的新方法。本文的主要贡献在于:一方面,针对由照明设备和传感设备构成的智慧路灯系统,建立了共用部件的线形n中取连续k1的F系统和线形n中取连续k2的F系统模型,缩短了智慧路灯系统可靠性分析的现实需求与相关可靠性理论之间的距离。另一方面,针对这类冗余系统模型的联合Signature计算问题,给出了比传统定义法计算效率更高的基于有限马尔可夫链嵌入法的计算方法。该方法有效地降低了计算的复杂度,为联合Signature的计算问题提供了更实用的理论工具,其应用范围包括但不仅限于此类系统,未来可广泛应用于无线通讯、管道运输、质量控制、模式识别等诸多领域的系统可靠性分析[25]。
1 智慧路灯系统模型
智慧路灯由照明设备和传感设备构成。设某型号智慧路灯的照明设备和传感设备的功能覆盖范围分别为a米和b米。在一条长(n-1)l米的路段上,以l米为间距单侧铺设n个该型号智慧路灯。设智慧路灯失效时同时失去照明功能和传感功能。由于这n个智慧路灯是同型号的,不妨假设它们的寿命相互独立且服从同一连续分布。若某时刻恰有连续k个智慧路灯s+1,…,s+k失效,且其中不包含路段两端点处的路灯1和路灯n(即s=1,…,n-k-1),如图1所示,则原先这k个智慧路灯覆盖的区域将主要由其左右两端工作的路灯s和路灯s+k+1提供照明和传感功能。易知路灯s和路灯s+k+1之间的距离为(k+1)l,因此智慧路灯系统的照明系统和传感系统是否失效取决于(k+1)l/2与对应设备的功能覆盖范围a和b的大小关系。将使得(k+1)l/2≥a成立的最小整数记为k1,使得(k+1)l/2≥b成立的最小整数记为k2。则当n较大时,可以近似地认为照明系统失效当且仅当有至少连续k1个智慧路灯失效,传感系统失效当且仅当有至少连续k2个智慧路灯失效,即可以近似地将这n个智慧路灯构成的照明系统和传感系统看做共用部件的线形n中取连续k1的F系统和线形n中取连续k2的F系统。

图1 连续k个智慧路灯失效示意图
为了研究这类智慧路灯系统的结构特性,本文将于第2部分针对共用部件的线形n中取连续k1的F系统和线形n中取连续k2的F系统,给出其联合可靠度函数的计算方法,并在此基础上于第3部分进一步给出刻画其结构特性的联合Signature指标的计算方法。相关算例研究和一些结论与展望分别见本文的第4部分和第5部分。
2 联合可靠度计算
假设系统Φ1和Φ2是共用部件的线形n中取连续k1的F系统和线形n中取连续k2的F系统,共用的n个部件的寿命独立同分布,且寿命分布F(x)为(0,∞)上的连续函数。不失一般性地假设k1
情形1t1≤t2
此时,定义状态空间为S=SW∪SF的马尔可夫链{Y(t),t=1,…,n},这里
SW={(i,j):0≤i≤k1-1,i≤j≤k2-1}
SF={(k1,k2)}
(1)
其中,工作状态Y(t)=(i,j)∈SW表示前t个部件组成的子系统在t1时刻至多有连续k1-1个部件失效,且部件t,…,t-i+1(i≥1)失效而部件t-i工作,而在t2时刻至多有连续k2-1个部件失效,且部件t,…,t-j+1(j≥1)失效而部件t-j工作,详见图2,其状态编号为

图2 马尔可夫链的工作状态示意图
(2)
而失效状态(k1,k2)表示前t个部件组成的子系统在t1时刻至少有连续k1个部件失效,或在t2时刻至少有连续k2个部件失效,其状态编号为
e(k1,k2)=e(k1-1,k2-1)+1
(3)
这里N表示工作状态的个数。令p0=F(t1),p1=F(t2)-F(t1),p2=1-F(t2),将所有状态按编号从小到大的顺序排列后,该马尔可夫链的(一步)转移概率矩阵为

=(p0I{A0}+p1I{A1}+p2I{A2})(N+1)×(N+1)
(4)


情形2t1>t2
此时,定义状态空间为S=SW∪SF的马尔可夫链{Y(t),t=1,…,n},这里
SW={(i,j):0≤i≤k1-1,0≤j≤i}
SF={(k1,k2)}
(5)
其中,工作状态(i,j)∈SW和失效状态(k1,k2)的定义与情形1相同,其状态编号分别为
(6)
(7)
这里N:=e(k1,k2)-1表示工作状态的个数。令p0=F(t2),p1=F(t1)-F(t2),p2=1-F(t1),将所有状态按编号从小到大的顺序排列后,该马尔可夫链的(一步)转移概率矩阵为
=(p0I{A0}+p1I{A1}+p2I{A2})(N+1)×(N+1)
(8)


3 联合Signature的计算
考虑共用n个部件的两个单调关联系统Φ1和Φ2,假设部件寿命X1,…,Xn独立同分布,且分布函数F(x)是(0,∞)上的连续函数,则这两个系统的联合Signature可定义为矩阵s=(si,j,1≤i,j≤n),si,j=P{T1=Xi:n,T2=Xj:n},这里si,j为第i个部件失效导致系统Φ1失效且第j个部件失效导致系统Φ2失效的概率,T1,T2分别为系统Φ1和Φ2的寿命,Xi:n,Xj:n分别为部件寿命X1,…,Xn的第i个和第j个次序统计量[15]。基于联合Signature的联合可靠度函数可简记为
(9)

(10)
对公式(9)中系统Φ1和Φ2的联合可靠度函数R(t1,t2)求偏导可知,
(11)
容易证得,联合可靠度函数和联合(生存)Signature是一一对应的,其中任何一个都可以通过另外一个以及分布函数F(x)得到,因此可以将联合(生存)Signature的计算问题转化为联合可靠度函数的计算问题。基于有限马尔可夫链嵌入法的联合可靠度函数计算方法已于第2部分给出,该方法主要适用于共用部件的n中取连续k型冗余系统及其衍生系统。
4 算例
城市管理部门计划在某重要交通路段上铺设智慧路灯,为该路段提供智慧照明和传感监控。经测算,若使用8个某种旧型号的智慧路灯,则该路段的照明系统Φ1失效当且仅当有至少连续3个路灯失效,传感系统Φ2失效当且仅当有至少连续5个路灯失效。假设路灯的寿命独立同分布,且分布函数连续,则令第3部分中n=8,k1=3,k2=5,即可得到两系统的联合可靠度函数R(t1,t2)。再由式(9)-式(11)可知,两系统的联合Signature为:
这表明,以概率3/140,照明系统在第3个路灯失效时失效,传感系统在第5个路灯失效时失效;以概率1/28,照明系统在第4个路灯失效时失效,传感系统在第5个路灯失效时失效;以概率1/70,照明系统和传感系统均在第5个路灯失效时失效;以此类推。
其中,以两系统均在第5个路灯失效时失效为例,由排列组合知识可知,第3,4,5个路灯失效时所有路灯的可能状态分布情况总共有1120种,其中使得两系统均在第5个路灯失效时失效的情况有16种(详见图3),因此对应的概率为16/1120=1/70,即根据定义求联合Signature也可得到相同的结果。
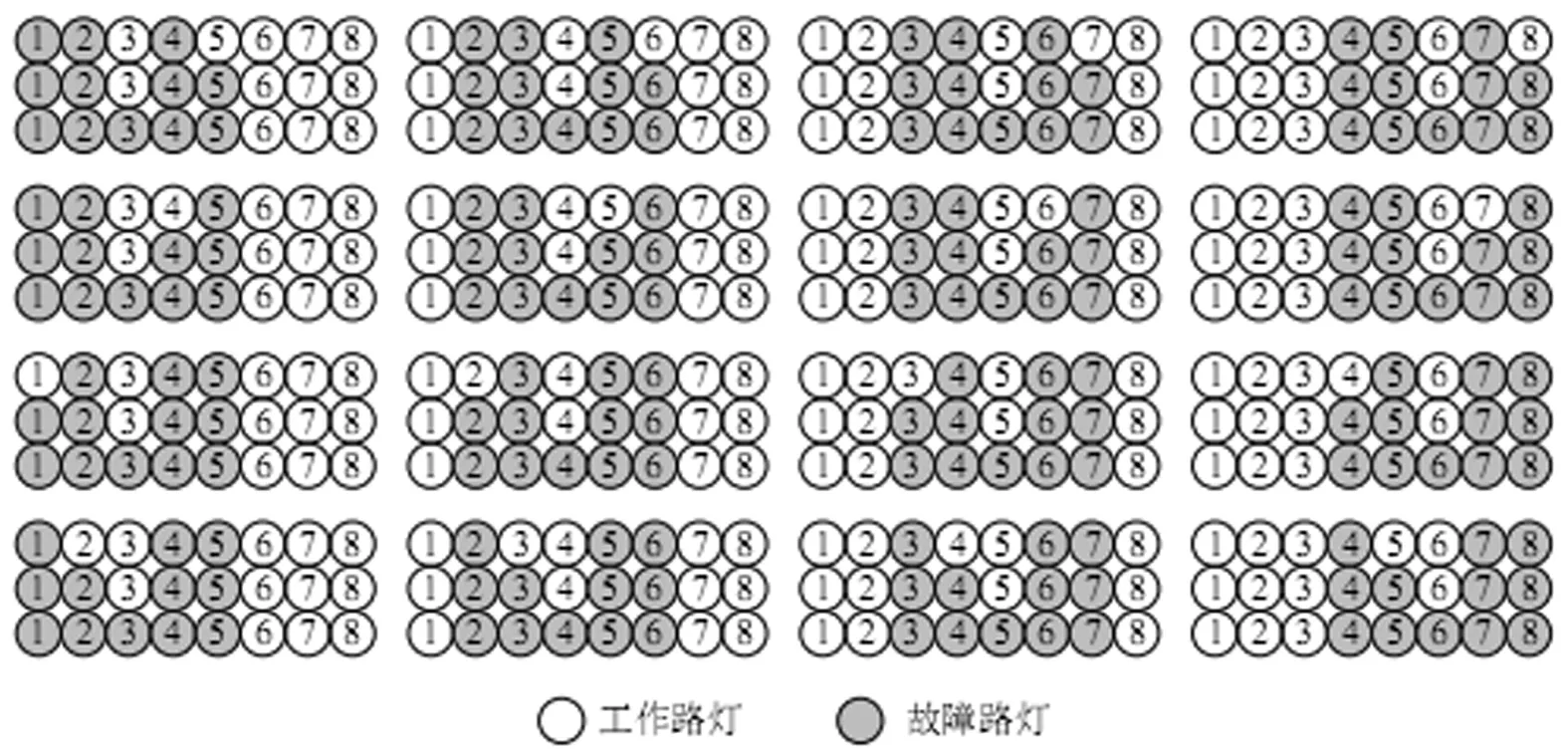
图3 第3,4,5个路灯失效时所有路灯的状态
为了从计算效率的角度比较本文中的有限马尔可夫链嵌入法与传统定义法的差别,在同一计算机(CPU:i5-4460,内存:4GB)上分别用这两种方法计算共用部件的线形n中取连续3的F系统和线形n中取连续5的F系统的联合Signature,运行时间见表1 (其中“-”表示运行时间超过2小时)。如表1所示,和定义法相比,有限马尔可夫链嵌入法在计算联合Signature时明显效率更高,尤其是当部件数n较大时。原因在于定义法需要分别考虑n!种部件失效顺序下系统状态的变化过程。
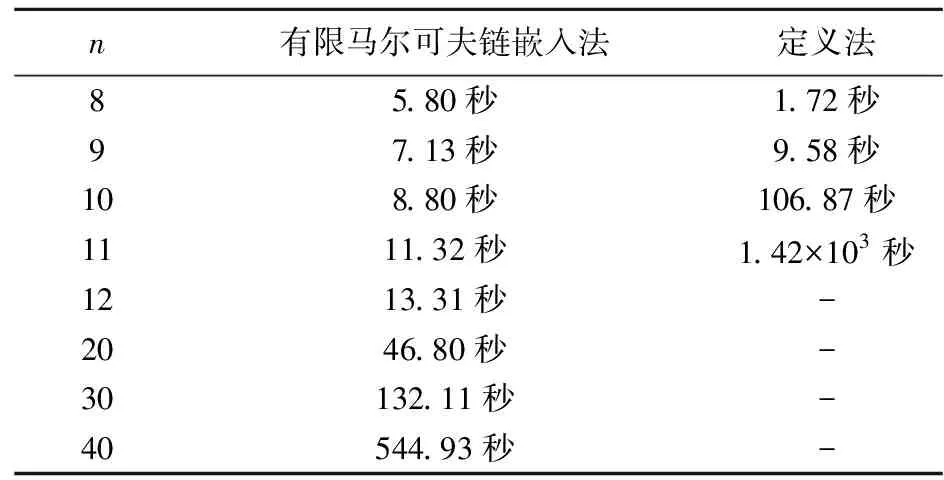
表1 有限马尔可夫链嵌入法与定义法的运行时间
假设还有一种新型号的寿命分布相同的智慧路灯可供选择,其照明设备的功能覆盖范围更小,但传感设备的功能覆盖范围更大。经测算,若使用8个新型号的智慧路灯,则该路段的照明系统Φ1失效当且仅当有至少连续2个路灯失效,传感系统Φ2失效当且仅当有至少连续6个路灯失效。类似地可以求出两个新系统的联合Signature为:
由两个旧系统的联合Signature和两个新系统的联合Signature可知,旧系统以概率
优于新系统, 以概率
劣于新系统。这里0.4317>0.1206,也就是说,在概率意义上,使用新型号的智慧路灯有更大的可能性会使智慧路灯系统可靠性变差,因此更推荐在该路段使用旧型号的智慧路灯。
5 结论
本文基于共用部件的线形n中取连续k型冗余系统模型来研究智慧路灯系统,并针对这类系统给出了基于有限马尔可夫链嵌入法的联合Signature计算方法。相比于传统定义法,该方法有统一的表达式,计算简单,效率更高,实用性更强。本文的主要贡献在于为智慧路灯系统的管理决策提供了基于可靠性建模的理论依据,丰富和发展了联合Signature的计算方法体系。在实践方面,针对由照明设备和传感设备构成的智慧路灯系统,建立了共用部件线形n中取连续k1的F系统和线形n中取连续k2的F系统模型。在理论方面,对这类冗余系统模型的联合Signature计算问题,给出了比定义法更加简单高效的基于有限马尔可夫链嵌入法的计算方法。该方法的适用范围和有限马尔可夫链嵌入法类似,主要包括共用部件的n中取连续k型冗余系统(n中取k系统、n中取连续k系统、n中取m个连续k系统、n中取含稀疏d的连续k系统和n中取m个含稀疏d的连续k系统等)及相关混合系统。未来研究包括但不限于:
(1)本文中假设智慧路灯只有工作和失效两个状态,但实际中照明设备和传感设备的失效可能不同时发生,因此建立多状态系统模型可以更好地研究智慧路灯系统的可靠性问题。在后续研究中,可以进一步考虑将本文的方法拓展到多状态Signature指标的计算问题中去。
(2)本文中假设智慧路灯是单侧铺设的,但实际中还存在双侧对称和双侧不对称等不同的铺设方式,因此在后续研究中可以针对不同的智慧路灯铺设方式分别建立不同的模型(如2×n中取连续2×k型冗余系统模型等),从而更好地研究相关可靠性问题。
(3)本文中假设所有的智慧路灯都是同一型号的,并且都由照明设备和传感设备构成,在后续研究中还可以考虑不同型号、不同设备类型的智慧路灯构成的复杂道路系统,并针对其部件重要度[30]等相关问题展开进一步研究。
(4)本文中没有考虑基于联合Signature指标的智慧路灯优化配置问题,在后续研究中可以综合考虑成本等因素展开深入研究。此外,当实际系统对计算效率有更高的要求时,可以用两端同时进行的有限马尔可夫链嵌入法[22]对本文中的方法进行改进和优化,从而进一步提高计算效率。
实际上,本文的研究内容可以广泛应用于可靠性领域中的诸多系统,智慧路灯系统只是其中比较有代表性的一个。例如,由若干个中继站构成的对两种不同类型的信号进行传输的通讯系统、若干次在两个不同标准下用于划分设备等级的启动验证试验、以及由若干个服务站构成的同时为人员和车辆提供补给的长途线路运输系统等,都可以用共用部件的线形n中取连续k1的F系统和线形n中取连续k2的F系统模型来描述。