深海液压动力单元振动噪声跨介质传播建模
2023-10-28李天昊杨奕婷刘银水
李天昊, 崔 岩, 杨奕婷, 刘银水
(华中科技大学 机械科学与工程学院, 湖北 武汉 430074)
引言
同电气、机械等传动方式相比,液压传动具有承载能力高、功率重量比大、动力源集中化等优势[1-2],因此液压动力单元(HPU, Hydraulic Power Unit)常被用于各种深海装备中。随着各国对深海领域的竞争进入白热化,深潜器等深海军事设备越来越重视其声隐身性,而在深潜器推进器不工作时,液压系统的噪声是装备噪声最主要的来源[3]。研究液压动力单元振动噪声跨介质的过程对于提升我国深海军事设备隐身性具有重要意义。
国内外学者对液压动力单元的元件噪声做了很多研究。程效锐等[4]通过CFD仿真,研究了叶片出口斜率对离心泵噪声的影响。强彦等[5]探究了流量、转速对外啮合齿轮泵噪声的影响,其进行流场计算和模态计算,结合实验分析,结果表明其运转的基频及其倍频为流致噪声的主要频率。BABIKIR H A等[6]采用神经网络法预测了斜盘柱塞泵的噪声。
除了关注动力源的噪声,关注管路、阀门噪声的相关研究也很丰富。ARIYADI H M等[7]研究了燃料电池充气阀门开度对噪声的影响,对狭窄流道进行了仿真。HAN H S等[8]对冰箱蒸发器的入口管道进行了实验分析,在管路使用了透明的材料,以观察内部流动和相变状态。
国内外的相关研究主要着眼于某个具体元件的噪声,关于系统级的噪声研究较少。目前FIEBIG W等[9-10]对系统级噪声有着较为深入的研究,其通过麦克风阵列测量了整个液压动力单元系统在液压泵激励下的噪声辐射状态,并总结了整个系统中振动噪声传递的途径。该实验是在地面环境进行的,而有关深海环境下的液压动力单元噪声的相关研究较少。海深对于噪声传播有着不可忽略的影响,因为在深海下高压会导致传播声介质的性质发生很大的改变[11-12]。
本研究从简化液压动力单元几何模型入手,构建其在深海高压环境下声振跨介质传播的物理模型,通过声传播分析,包括近场声压级的分析和远场声压级指向性分析,探究声源位置、海深对液压动力单元振动噪声传播的影响。
1 有限元模型
1.1 物理模型
本研究关注的液压动力单元几何模型如图1a所示,从上至下看,该单元由顶部泵侧壳体盖、泵侧壳体、壳体内部的静音泵、泵和电机的连接法兰、电机、电机侧壳体和底部电机侧壳体盖组成。在仿真中采用的简化模型如图1b所示,其壳体还原了真实的液压动力单元的尺寸,内部的电机-泵组合体则简化为圆柱体。

图1 液压动力单元Fig.1 Hydraulic power unit
由于电机-泵组合体形状近似于圆柱体,且在声学仿真中作为激振源存在,其对于噪声和振动跨介质传播的影响远小于外侧的壳体,根据QU Yegao等[3]的研究,当关注点在于外侧壳体对噪声振动的传播时,对几何模型的这种简化是合理的。
1.2 边界条件
本研究中,液压动力单元的固体结构采用316L不锈钢材料,壳体内为液压油,壳体外部为海水。壳体内的电机-泵组合体作为激振源,对其设置周期性的体积力。水的黏度很低,可以忽略黏性耗散[13],采用常规的声学模型;而液压油黏度非常高,且随海深发生显著变化,因此对液压油域设置热黏性声学模型。在每个固液交界处设置流固耦合模型,计算域半球形边缘设置为无反射条件。液压动力单元底部所在平面一般为艇身壁面,由于壁面的尺寸远大于液压动力单元,且特性阻抗远高于海水和液压油,故在仿真中将壁面设置为无限大的硬声场边界,如图2所示。
在仿真中设置了海水深度和电机-泵组合体与外壳的偏心量2个变量,以研究噪声传播与这2个参数的关系。海水深度设置了0, 1000, 2000, 3000 m 4个数值,环境压强随之而变,由于补偿器的存在,壳体内外压强相等;偏心量设置为0(即同心),20, 40, 60, 80 mm。图3为偏心量的示意图。

图3 电机-泵组合体与壳体的偏心量Fig.3 Offset between motor-pump assembly and shell
对于本研究,海深的变化最主要会影响压强,压强的变化会影响到一些与声传播相关的物理性质,其中包括介质的密度、黏度和声速。海水和液压油的密度-压强-温度的数据分别来自于ROMEO R等[14]和GRZYBOWSKI A等[11]的相关研究,通过密度和压强的函数关系可以求得声速[15],海水声速vs和液压油声速vo数据如图4a所示。此外,液压油的动力黏度μ数据见图4b(温度固定为25 ℃)。
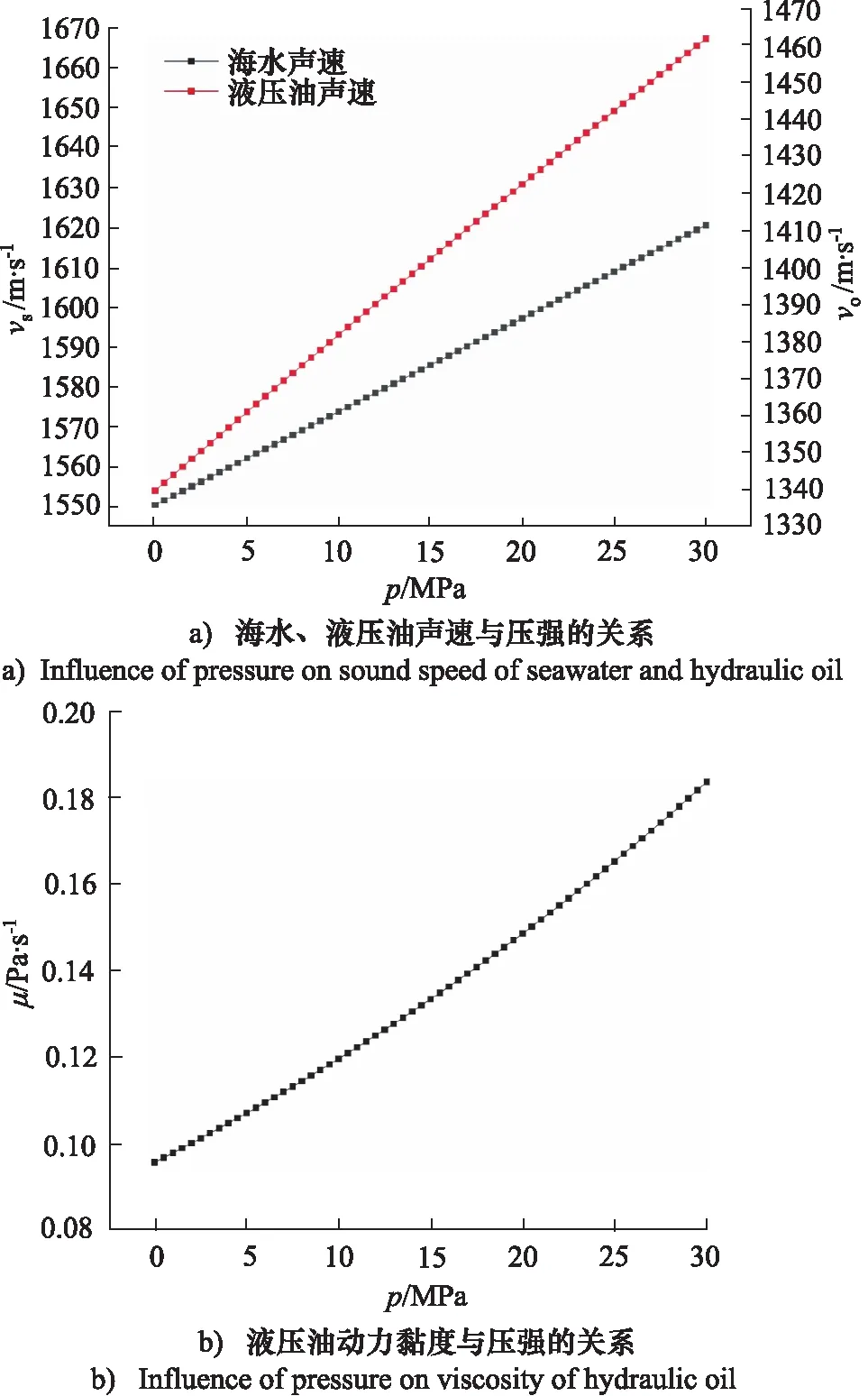
图4 海深对声传播的影响Fig.4 Influence of sea depth on sound propagation
2 结果与讨论
2.1 海深对噪声振动传播的影响
为探究在相同工况下,海深对噪声振动传播的影响,以液压动力单元中的电机-泵组合体相对壳体偏心量为0时为例,进行了近场声压级和远场声传播指向性进行了分析。图5a、图5b、图5c、图5d分别对应0, 1000, 2000, 3000 m海深下的近场声压级云图。由于固体既可传播横波也可传播纵波,一般不采用声压级描述固体结构的振动,故图中固体部分为白色。

图5 液压动力单元在0~3000 m海深下近场声压级Fig.5 Near field sound pressure level contour of hydraulic power unit at depth of 0~3000 m
从结果可知,随着海深的增加,液压动力单元的近场声压级最大值和最小值都发生了降低,可见虽然海深增加会导致密度和声速的上升,这是有利于声能量的传播的,但是又因为液压油的黏性耗散大大增加,根据计算结果,由浅至深的黏性耗散最大值分别为4.5×10-9,5.39×10-9,6.36×10-9,7.51×10-9W/m3,这导致了总体上辐射出的声能量的降低。黏性耗散的最大值均出现在电机-泵组合体的圆柱体边缘处,在圆柱体发生振动时,其表面附近的流体流速最快处正是在这种边缘处,这与流体力学理论相符。此外,在所有海深下,最大声压都出现于液压动力单元壳体外部,最小声压出现在壳体内部。
远场声传播指向性的含义是:在选定的截面上,在距离指定中心固定的距离上,不同方向具有不同的声压级,这样的特性即为远场指向性。远场指向性反映了一个噪声源的声能量辐射的集中程度,对于有些场合,具有强的指向性意味着可以在能量有限时将声信号传播至更远,但是反之也会更容易被探测到。对于本研究,传播距离取100 m,以液压动力单元底面圆心为中心,取2个截面进行研究,这2个截面分别如图6a、图6b所示,记为底面和侧面。远场指向性图中的极轴(即0°方向)对应于图6中的箭头,且该轴与电机-泵组合体的偏心方向一致。
其中底面与液压动力单元的底面重合,侧面会通过壳体和电机-泵组合体两者的轴线。对于本小节,因为电机-泵组合体是居中的,几何模型是对称的,故底面不存在指向性,由浅至深,底面远场声压级分别为40.91, 40.67, 40.44, 40.21 dB,随着海深的增加而降低,这与近场声压级的分析相吻合。侧面指向性图如图7所示。
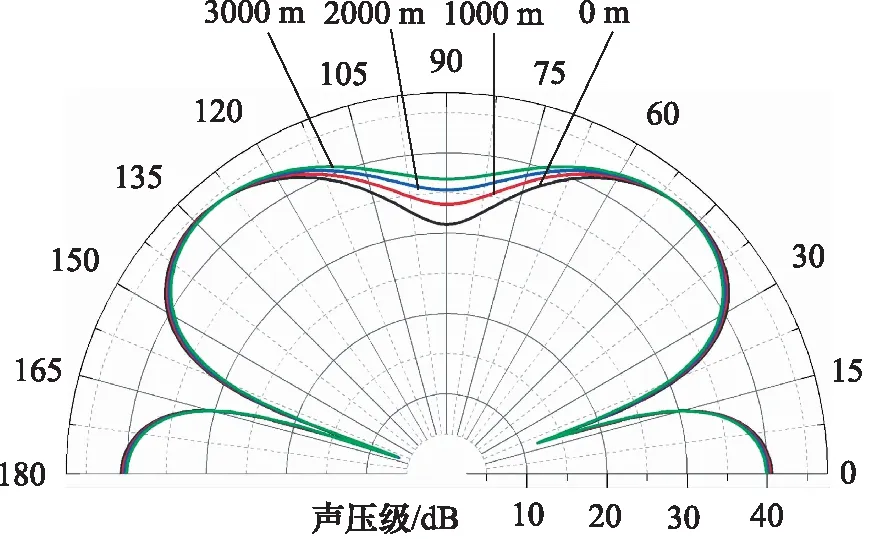
图7 不同海深下侧面远场声压级指向性Fig.7 Lateral far field directivity of sound pressure level at different sea depth
从指向性图可以看出,远场声压级的指向性与近场声压级云图的声压强弱分布有很高的相似性。在0°~60°(120°~180°)之间在不同海深下声压级相差极小。在这一区间,根据导出数据,随着深度的增加,声压级有一定的降低,相比于0海深,该区间的平均声压级分别下降了0.4%,0.9%,1.3%。随着海深的增加,最大声压级也有所降低,由浅至深分别为44.42,44.35,44.28,44.22 dB,这与近场声压级的结果相符。
在液压动力单元顶部区域即60°~120°的区间,海深对远场声压级产生了显著影响,且深度越深,外部声压级反而越大,这可能是由于声速改变导致的声波干涉的变化,也与液压动力单元壳体的模态有关。从能量守恒的角度分析,虽然在更大的海深下声能量在液压油当中发生了更多的衰减,但是总体上声能量更加集中地从壳体顶部的圆周辐射至外部,导致了在更深的海深下顶部远场声压级更高。
2.2 电机-泵组合体位置对噪声振动传播的影响
固定海深为3000 m,在激振源即电机-泵组合体放置在不同的位置时,声传播的近场声压级云图如图8a~图8e所示,其分别代表了偏心量为0, 20, 40, 60, 80 mm时的云图。

图8 电机-泵组合体与壳体在不同偏心量下的声压级云图Fig.8 Sound pressure level contour of hydraulic power unit with different offset between motor-pump assembly and shell
随着偏心量的改变,可以预见声压级云图将不再对称。在偏心量为0时,振动噪声主要从上方的泵侧壳体盖和壳体传出,而当偏心量增大后,振动从更多的方向辐射出去。不过偏心量为60 mm时是一个特例,从声压级云图的分布上来看,其噪声辐射的特点与偏心量为0的时候很相似,都在壳体外部左右两侧有较为明显的声影区,在上侧壳体内部也有一道非常明显的声影区,而且相比较其他偏心量的声压级云图,60 mm 偏心量的云图较为对称。正是因为60 mm的偏心量设置与0偏心量有着相似的声振传播形式,60 mm 时的最大声压级也与0偏心量接近,甚至最小声压级远低于0偏心量的设置。
与上一小节偏心量为0时研究海深对声振传播的影响相比,本小节改变了偏心量,几何结构失去了原本的对称性,故除了侧面会存在指向性,底面也会存在指向性。图9为不同偏心量设置下的远场声压级指向性图,其中图9a代表截面为底面,图9b代表截面为侧面。
从图9a可看出,当激振源偏置后,指向性呈现出“四叶草”的形状,只有偏心量为60 mm时是一个例外,呈现出腰部轻微内收的“操场形”,和无偏心量时的远场特性比较接近,这也与图8近场声压级云图的结果相吻合。有偏心量时,在90°和270°方向声压级均大于无偏心量时,且对于40, 60, 80 mm这3种偏心量设置,该位置为远场声压的极大值,对于20 mm偏心量则为次极大值;而在0°方向,除了60 mm偏心量设置,其他几种设置的声压级均大于无偏心量。可见除了偏心量为60 mm,虽然有偏心量时在某些特定角度存在声影区,声压级明显低于无偏心量,但是在其极大值和次级大值区间却远大于无偏心量的声压级,总体上会更容易被探测到。而偏心量为60 mm时,在绝大部分方向声压级低于无偏心量的设置,其最高声压级也没有明显高于无偏心量的设置,所以通过其他设计合理避免声压级极大值暴露在外,60 mm偏心量是一个有利于减振降噪和声隐身的设计。
从图9b侧面指向性可看出,20 mm和80 mm偏心量远场声压级极大值出现在了0°方向,其他设置下则出现在液压动力单元壳体顶部的边缘附近的方向(45°左右)。激振源偏置后壳体顶部边缘方向远场声压级均高于无偏心量,且除了60 mm的设定,在0°方向也高于无偏心量的声压级。60 mm的远场指向性图形状与无偏心量很相似, 相比于无偏心量, 其在0°至15°的声能量更多地从壳体上部辐射出去了。
3 结论
通过有限元计算,分析了深海液压动力单元在不同海深下和电机-泵组合体在不同位置下对振动噪声传播的影响。仿真结果表明,随着海深增加,介质密度变大声速变快等有利于声传播因素的影响小于黏度变大造成黏性耗散的影响,在更大的海深下,液压动力单元的近远场噪声声压级均有降低。电机-泵组合体的位置对声传播影响是非常明显的,偏置其位置总体上不利于减振降噪,仅有偏心量为60 mm时,声压级在大部分方向显著降低,在少部分方向少量升高。对激振源采用合适的偏心量,在合理配合其他结构设计时,使得噪声传播的声影区暴露在外,可以达到减振降噪的目的。
