无信号控制交通场景的人车博弈行为分析及决策建模
2023-10-24李海洋曲大义杨子奕陈意成邵德栋
李海洋,曲大义,*,杨子奕,陈意成,邵德栋
(青岛理工大学 a.机械与汽车工程学院;b.土木工程学院,青岛 266525)
在发展中国家,行人交通在城市交通系统中占据主导地位[1]。资料显示,我国城市交通出行中,超过1/5为行人交通[2]。行人交通虽然是所有交通方式开始和结束必不可少的组成部分[3],但因其存在易受伤害等自身特点与车流交通相比呈现弱势[4-5]。数据显示,全球每年约有百万人死于交通事故,其中约50%为行人和自行车骑行者[6],我国发生在无信号控制人行横道区域的行人事故超过1/3,其中死亡事故占比超过37%[7]。无信号控制的路段和交叉口斑马线处,由于缺乏交通信号灯和相应的空间渠化措施,难以分离行人和车辆在时、空上的通行权,因此易造成人车冲突,危及交通安全[8-9]。由此可见,无信号控制场景下,行人过街过程中存在人-车冲突,分析人-车冲突的决策过程和决策影响因素对于揭示人-车冲突机理,减少人-车冲突事故具有重要意义。
近年来,针对人车冲突与博弈决策行为分析,国内外学者做了部分研究,如YAN等研究了右转车辆和过街行人之间的相互作用和博弈过程,建立了元胞自动机模型[10];QIU等对路口交通参与者的交通行为进行研究,构建了交通行为博弈模型[11];周雪峰等针对无信号控制路段上行人与车辆存在抢行的问题,建立了完全信息静态和动态两种博弈模型[12];刘博通分别分析了车辆和过街行人对风险的感知情况及二者的决策行为,得到了二者感知风险的变化规律和影响决策行为的因素[13];刘丽娟等基于博弈论,对行人和车辆的决策行为过程进行分析,建立了只考虑时间因素、同时考虑时间和风险因素的支付矩阵,并讨论了Nash均衡[14];王璐等提出了基于脏脸博弈的模型,分析了车型、行人等待时间和个体认知能力异质性对人车冲突的影响[15];CHENG等使用不完全信息动态博弈模型研究了人车通行的碰撞风险,揭示了人车博弈中行人最佳决策与车辆运行速度存在相关性[16];李新波建立了人车博弈模型,应用累计前景理论选出博弈双方的最佳策略[17];杨玉婷以时间和安全效用函数构造博弈收益矩阵,建立了基于冲突的不完全信息静态博弈模型[18];韩喜双等将人车博弈分为行人先行和车辆先行两类情景,利用扩展式博弈模型,揭示了行人过街决策机理[19];魏丽英等建立了人车冲突演化动力学模型[20];雷爱国等将过街行人心理分为3个阶段,并构建各阶段的人车博弈矩阵,分析均衡点表明:行人和车辆演化博弈最终有2个稳定状态[21];邝先验等将车辆分为礼让与不礼让2种类型,并考虑机动车礼让比例,在元胞自动机模型的基础上,引入动态博弈更新规则,模拟无信号控制处的交通冲突[22]。
综上所述,国内外学者在对人车冲突进行博弈解析的过程中,往往将行人和车辆的行动简化为单纯的合作博弈或非合作博弈模型,没有对博弈的阶段性变化和行人的主观因素进一步考虑,难以体现人车冲突时,行人与车辆驾驶人生理、心理的动态变化过程和决策的变化性。因此本文将利用静态博弈模型、不完全信息动态博弈模型对人车决策全过程进行分析,同时考虑行人的生理、心理特性,进一步解析无信号控制场景下的人车冲突。
1 人车冲突现象分析
在无信号控制的交叉口和路段斑马线处,行人与车辆常产生路权冲突,常见的人车冲突场景包括:
1) 车辆距离斑马线较远(满足行人安全心理距离),行人能够以正常速度通过。此时,行人与车辆可达成共识:行人安全通过后,车辆驶过斑马线。
2) 车辆距离斑马线很近(明显小于停车视距),行人无法安全通过。此时,行人与车辆可达成共识:行人等待车辆通过斑马线后再通过。
3) 车辆距离斑马线位置较为“尴尬”(介于停车视距与安全心理距离之间),行人和车辆均可尝试先行通过。此时,行人与车辆常常难以达成共识,会出现双方相互打手势、一方或双方同时加速或减速、车辆摁喇叭等行为。
其中,场景1),2)情况都较为简单,行人与车辆能够直接达成共识。而场景3)较为复杂,行人与车辆往往需要1轮至多轮博弈才能达成共识。
博弈双方行人和车辆均有两个策略可以选择,即通过与不通过。可将行人的策略合集记为Sp={C,D},C表示穿越,D表示等待;将车辆的策略合集记为Sc={T,R},T表示通过,R表示让行。由于行人与车辆各有两种策略,因此初始决策时会出现如表1所示的4种情况:

表1 纯策略矩阵
情况①:行人选择穿越,车辆选择通过。此时对应上述冲突场景3),说明行人与车辆在第一阶段的博弈中互不相让,易产生交通事故。因此在这种情况下,行人与车辆接下来会进行第二阶段博弈,以达到安全通过的目的。
情况②:行人选择穿越,车辆选择让行。此时对应上述冲突场景1),行人能够安全过街,同时车辆也能在行人过街后安全通过。
情况③:行人选择等待,车辆选择通过。此时对应上述冲突场景2),行人无法安全过街,因此行人只能等待车辆通过后再过街。
情况④:行人选择等待,车辆选择让行。此时对应上述冲突场景3),说明行人与车辆在第一阶段的博弈中互相让行,导致双方均无法通行。此时行人与车辆会进行第二阶段博弈,以达到通行的目的。
通过上述分析不难发现,行人与车辆在一开始就能达成一方让行,另一方通过是最为高效的,即情况②③。但行人与车辆在第一阶段博弈失败,产生了互不相让和互相让行的情况也较为常见,即情况①④。对于情况①④,接下来就进入到人车博弈的第二阶段——序贯博弈的过程,即行人与车辆一方先决策,另一方后决策。
2 博弈影响要素分析
博弈主要由博弈参与者、策略以及策略对应的收益构成[23]。影响人车博弈过程的因素主要包括行人等待时间、策略选择概率、行人紧张度、策略支付,同时也将延误、风险度、行人风格和车辆驾驶人风格等融合考虑。
2.1 行人等待时间
行人过街心理与行人等待时间相关,行人等待时间越长,行人心理越容易变得急躁和不耐烦,进而导致行人冒险过街的概率增高。卢守峰等[24]研究发现行人过街最大等待时间约为40~50 s;冯树民等[25]得出我国大部分行人过街可容忍的等待时间为50 s。
结合相关研究[15,24-27]和行人等待时间的规律特性能够发现,行人等待时间与冒险穿越概率之间的关系与生物学中种群增长的S型曲线模型[28]具有极高相似性,因此可对生物学中种群增长模型进行修正,构造概率影响系数,如式(1)所示,可反映行人等待时间对冒险穿越概率的影响。
(1)
式中:ζ为概率影响系数;k为行人心理忍耐极限,可在0~2之间取值,数值越大反映行人越接近心理忍耐极限;k0为行人初始心理感受;r为心理忍耐程度增长率,与行人风格相关;t为行人等待时间。
当行人心理忍耐极限k为2,行人初始心理感受k0为1,概率影响系数ζ随心理忍耐程度增长率r和行人等待时间t变化的函数图像如图1所示。从图1可以看出,ζ随着r和t的增大而增大,同时曲率也随之增大。图2为当r=25%时概率影响系数ζ函数图像。从图2可以看出,冒险概率随行人等待时间的增加,分为3个明显不同的阶段:1)行人等待时间少于20 s时,冒险穿越概率较低;2)等待20~35 s后,冒险穿越概率迅速增大;3)35 s后冒险穿越概率接近最大。
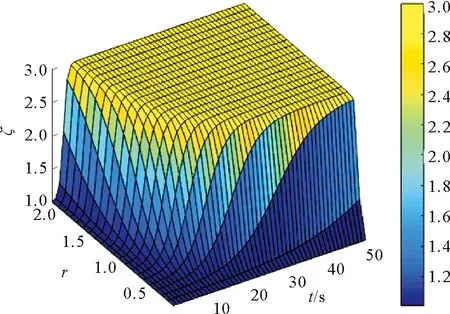
图1 概率影响系数ζ三维曲面
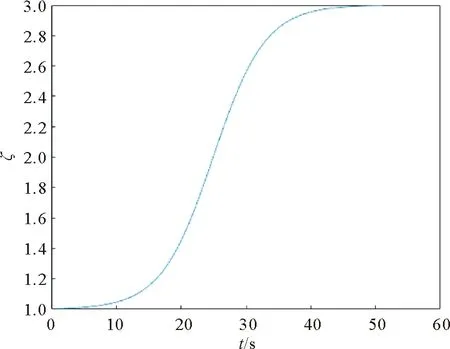
图2 r=25%时概率影响系数ζ函数图像
2.2 博弈策略选择概率
由前文分析可知,行人与车辆在估计自身通行时间和对方通行时间后,通过比较彼此通行时间大小作出决策,因此行人和车辆的策略选择概率可采用如下方法表示[15]:
(2)
(3)

则行人选择等待的概率为1-Pp,车辆选择让行的概率为1-Pc。
由于上述策略选择概率仅考虑了行人与车辆对彼此通行时间的判断过程,无法体现行人等待时间的影响,因此需用Pp与ζ相乘,在博弈中代入修正的行人选择穿越的概率P′p,即
(4)
2.3 行人紧张度
行人紧张度能反映行人在过街过程中,面对车辆时产生的焦虑情绪,主要表现为在过街过程中的加速、减速、转向、停止等行为上。
一般情况下,行人紧张度与行人、车间的距离呈负相关,与车辆速度呈正相关,且不同风格的行人面对同一情况下的心理压力也不同,可通过行人心理压力场进行衡量,行人心理压力场场强可表示为
(5)
式中:E为行人心理压力场场强;εp为风格特性修正系数;ve为速度修正项;tc为车辆反应时间;d为车辆与行人距离;Ls为行人过街安全心理距离;vi为第i车道车辆速度。
行人过街安全心理距离Ls可表示为[29]
Ls=vi(nLc/vp+tp)+Cs
(6)
式中:n为车道数;Lc为车道宽度;vp为行人速度;tp为行人反应时间;Cs为车辆距行人的安全距离。
行人过街时,在其周围会形成一个如图3所示以行人为焦点的椭圆形心理压力场[30],行人受到的心理压力(反映行人紧张度)与车辆在心理压力场中所处位置的场强大小、车辆与行人间距和速度以及角度密切相关。椭圆等势线可表示为

图3 心理压力场等势线
(7)
(8)
(9)
(10)
式中:r为等势线上的点到行人距离;a为椭圆半长轴;b为椭圆半短轴;c为椭圆半焦距;θ为等势线上某点和行人连线与行人运动方向所在直线所成的角度;Δt为车辆运动时间。
联立式(7)—(10)可得:
(11)
当θ=90°,即车辆与行人处于同一车道时,由式(11)可得
d=vi·Δt·(2r+1)
(12)
将式(6)(12)代入式(5)中可得:
(13)
2.4 策略与支付
支付效用函数可反映决策者的收益情况,主要包括延误、风险、紧张支付,而且与行人风格与车辆驾驶人风格相关,同时还受行人等待时间的影响。设up为行人效用,uc为车辆效用,则二者的支付效用函数可表示为
(14)
(15)
(16)

为了较为直观地体现不同风格、不同阶段下行人与车辆的策略选择,可设定各类支付效用的初始值,见表2、表3。

表2 行人效用支付
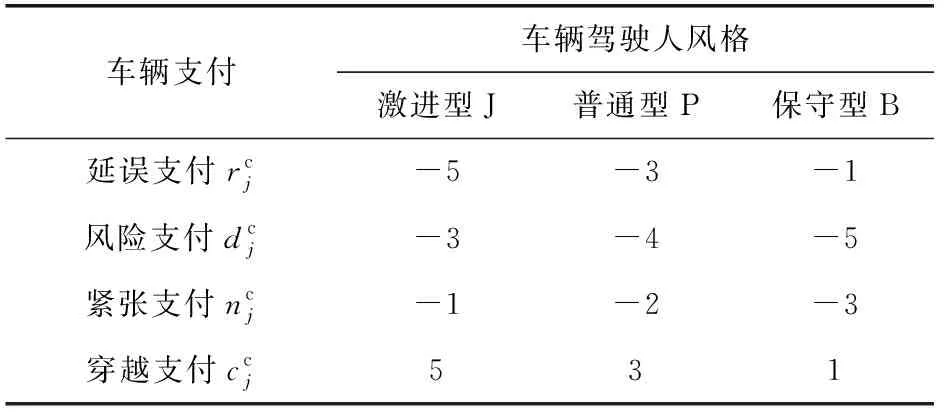
表3 车辆效用支付
对支付效用初始值的设定,分析如下:
1) 根据前文分析,随着等待时间的变长(即从阶段1到阶段3),行人冒险穿越概率会增大,因此行人的延误支付、风险支付的绝对值均增大。由于不同风格行人对延误和风险的在意程度不同,因此数值设置也有差别。

行人穿越支付为正数,表示获得通行权的收益,均设定为 1。可理解为,在阶段1,行人穿越而机动车避让的话,行人总的效用支付为:延误支付+穿越支付,即 1-1=0,行人总支付效用为0,同理,车辆也没有额外支付,与实际情况相符。
2) 对于车辆来说,车辆并不知道行人处于哪个阶段,车辆的决策主要与自身相关,因此根据车辆驾驶人风格不同,合理设定各项支付初始值。
3 博弈模型构建
行人过街与车辆发生冲突后,双方开始做出的决策往往没有先后次序,几乎同时作出决策,因此属于同时博弈。若在初始阶段的博弈达成共识,则博弈结束;若第一阶段的博弈无法达成共识,即产生了人车互让或互不相让的情况,则会进入下一阶段博弈——序贯博弈,在这个阶段,冲突双方会尽可能在揣测对方的意图后做出决策,并在接下来的行动中进一步修正,直到双方达成通行共识。
3.1 博弈基本假设
由于行人过街存在诸多的干扰性、不确定性因素,因此在运用博弈理论研究人车冲突问题时需要对博弈双方以及部分条件进行合理化假设:
1) 将过街行人与车辆视作博弈的双方,且双方均为理性人,即双方的决策都是以实现自身效用最大为目标。
2) 过街行人与车辆彼此互不了解、不清楚对方的行为风格及倾向。
3) 假设过街行人与车辆是在道路、环境条件良好,视距良好的情况下进行博弈。
3.2 混合策略博弈模型
混合策略博弈是指在给定信息情况下,能够以某种概率选择不同策略的博弈。行人与车辆博弈的混合策略收益矩阵见表4,行人与车辆选择不同策略时产生的收益函数为up和uc,例up(C,T)为行人选择穿越策略且车辆选择通过策略时行人的收益函数。支付效用注释见表5。

表4 行人与车辆博弈的混合策略收益矩阵

表5 支付效用注释
表4中行人和车辆的期望收益可分别表示为
φp=up(C,T)P′pPc+up(C,R)P′p(1-Pc)+up(D,T)(1-P′p)Pc+up(D,R)(1-P′p)(1-Pc)
(17)
φc=uc(C,T)P′pPc+uc(C,R)P′p(1-Pc)+uc(D,T)(1-P′p)Pc+uc(D,R)(1-P′p)(1-Pc)
(18)
通过将式(17)中行人的收益函数φp对Pc求导并令其导数为0,可得P′p为
(19)
同理将车辆的收益函数φc对P′p求导并令其导数为0,可得Pc为
(20)
当博弈中不存在纯策略纳什均衡,行人和车辆的策略选择概率P′p和Pc必须满足上述条件时,才能得到混合策略博弈的纳什均衡。
3.3 序贯博弈模型
序贯博弈是博弈双方选择策略有时间先后的博弈形式。当行人与车辆在混合策略博弈阶段没有达成共识时,此时进入序贯博弈阶段,在该阶段分为行人先行和车辆先行两种情况。
3.3.1 “行人先行”序贯博弈模型
当行人先行动时,车辆会推测行人的行动,然后决定自己的行动,其博弈过程及支付效用,如图4所示的博弈树。
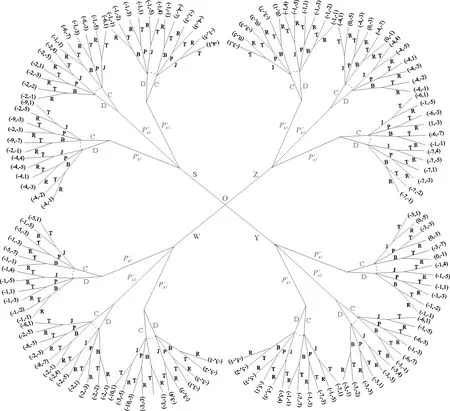
图4 “行人先行”博弈树O—博弈树起点;Z,Y,S,W—支配型、影响型、思考型、稳健型行人;P′p1,P′p2,P′p3—处于行人等待阶段1,2,3的概率;C,D—行人穿越和等待;J,P,B—激进型、普通型、保守型车辆驾驶人;T,R—车辆通过和让行
在该博弈模型中,行人与车辆的博弈过程为:博弈开始时,行人可分为支配型、影响型、思考型、稳健型,4种类型的行人分别以概率P′p1,P′p2,P′p3处于不同等待阶段,然后行人进行决策,策略集为{穿越,等待},表示为Sp={C,D};接着3种类型(激进型、普通型、保守型)的车辆驾驶人进行决策,策略集为{通过,让行},表示为Sc={T,R};最后博弈双方得到的支付效用结果按照表5所示的函数表达进行计算,结果标注在博弈树终止节点旁。
由图4可以看出,Z型(支配型)行人的3个阶段中,策略C与策略D带来的收益相比,0>-1,0>-4,-6>-7;Y型(影响型)行人的3个阶段策略C与策略D带来的收益相比0>-1,-1>-3,-1>-5,因此支配型和影响型行人的策略C属于占优策略。同理,S型(思考型)行人的阶段2和阶段3中,策略C与策略D带来的收益相比-1>-2,-2>-4,因此策略C也属于占优策略。
当行人的策略确定后,车辆选择策略T或R取决于车辆的支付效用。
若行人先行动选择策略C,则机动车选择策略T的期望收益为
dc=4(P′p1+P′p2+P′p3)Pc(1-3-7)=-36Pc
(21)
若行人先行动选择策略C,则机动车选择策略R的期望收益为
dc=4(P′p1+P′p2+P′p3)(1-Pc)(-5-3-1)=-36(1-Pc)
(22)
因此,当Pc>0.5时,若车辆期望收益dc>-36Pc,车辆则选择策略T;若-36(1-Pc)
若行人先行动选择策略D,则机动车选择策略T的期望收益为
dc=4(P′p1+P′p2+P′p3)Pc(4+1-2)=12Pc
(23)
若行人先行动选择策略D,则机动车选择策略R的期望收益为
dc=4(P′p1+P′p2+P′p3)(1-Pc)(-5-3-1)=-36(1-Pc)
(24)
因此,若车辆期望收益dc>-12Pc,车辆则选择策略T;若-36(1-Pc) 3.3.2 “车辆先行”序贯博弈模型 当车辆先行动时,行人会推测车辆的行动,然后决定自己的行动,其博弈过程及支付效用,如图5所示的博弈树。 图5 “车辆先行”博弈树O—博弈树起点;Z,Y,S,W—支配型、影响型、思考型、稳健型行人;P′p1,P′p2,P′p3—处于行人等待阶段1,2,3的概率;C,D—行人穿越和等待;J,P,B—激进型、普通型、保守型车辆驾驶人;T,R—车辆通过和让行 在该博弈模型中,行人与车辆的博弈过程为:博弈开始时,车辆驾驶人可分为激进型、保守型、普通型,3种类型的车辆驾驶人进行决策,策略集为{通过,让行},表示为Sc={T,R};然后4种类型(支配型、影响型、思考型、稳健型)的行人分别以概率P′p1,P′p2,P′p3处于不同等待阶段,行人进行决策,策略集为{穿越,等待},表示为Sp={C,D};最后博弈双方得到的支付效用结果按照表5所示的函数表达进行计算,结果标注在博弈树终止节点旁。 由图5可以看出,J型(激进型)车辆驾驶人选择策略T和策略R带来的收益相比,1和4均大于-5;P型(普通型)车辆驾驶人选择策略T和策略R带来的收益相比,1>-3,因此激进型和普通型车辆驾驶人的策略T属于占优策略。同理,B型(保守型)车辆驾驶人选择策略T和策略R带来的收益相比,-2和-7均小于-1,因此策略R属于占优策略。 当车辆的策略确定后,行人选择策略C或D取决于行人的支付效用。 若车辆先行动选择策略T,则行人选择策略C的期望收益为 dp=3[(-4-3-3-5)PcP′p1+(-6-4-6-8)PcP′p2+(-9-6-7-10)PcP′p3] =-3Pc(15P′p1+24P′p2+32P′p3) (25) 若车辆先行动选择策略T,则行人选择策略D的期望收益为 dp=3[(-1-1-1-1)Pc(1-P′p1)+(-2-4-3-2)Pc(1-P′p2) +(-4-7-5-3)Pc(1-P′p3)]=-3Pc[4(1-P′p1)+11(1-P′p2)+19(1-P′p3)] (26) 因此,当15P′p1+24P′p2+32P′p3>4(1-P′p1)+11(1-P′p2)+19(1-P′p3)时,若行人期望收益dp>-3Pc[4(1-P′p1)+11(1-P′p2)+19(1-P′p3)],车辆则选择策略D;若-3Pc(15P′p1+24P′p2+32P′p3) 当15P′p1+24P′p2+32P′p3<4(1-P′p1)+11(1-P′p2)+19(1-P′p3)时,若行人期望收益-3Pc[4(1-P′p1)+11(1-P′p2)+19(1-P′p3)] 若车辆先行动选择策略R,则行人选择策略C的期望收益为 dp=3[(-1+0+0-1)(1-Pc)P′p1+(-1+0-1-2)(1-Pc)P′p2 +(-2-1-1-3)(1-Pc)P′p3]=-3(1-Pc)(2P′p1+4P′p2+7P′p3) (27) 若车辆先行动选择策略R,则行人选择策略D的期望收益为 dp=3[(-1-1-1-1)(1-Pc)(1-P′p1)+(-2-4-3-2)(1-Pc)(1-P′p2) +(-4-7-5-3)(1-Pc)(1-P′p3)]=-3(1-Pc)[4(1-P′p1)+11(1-P′p2)+19(1-P′p3)] (28) 因此,当2P′p1+4P′p2+7P′p3>4(1-P′p1)+11(1-P′p2)+19(1-P′p3)时,若行人期望收益dp>-3(1-Pc)[4(1-P′p1)+11(1-P′p2)+19(1-P′p3)],车辆则选择策略D;若-3(1-Pc)(2P′p1+4P′p2+7P′p3) 当2P′p1+4P′p2+7P′p3<4(1-P′p1)+11(1-P′p2)+19(1-P′p3)时,若行人期望收益dp> -3(1-Pc)(2P′p1+4P′p2+7P′p3),车辆则选择策略C;若-3(1-Pc)[4(1-P′p1)+11(1-P′p2)+19(1-P′p3)] 通过求解博弈模型均衡解的过程可以看出,博弈存在人车冲突的情形(行人选择策略C,车辆选择策略T),此种情况下容易造成安全事故和多次博弈。因此,可以通过管理手段和控制手段加以干预,使得行人在选择策略C(穿越)时,车辆选择策略T(通过)的支付效用减少而选择策略R(让行)带来的支付效用足够大,促使车辆选择策略R,即避让行人。 同时也存在人车互让的情形(行人选择策略D,车辆选择策略R),此种情况下会造成通行效率低下和多次博弈。因此,可以通过技术手段提高人-车-路的协同程度,在保证安全的情况下,提高通行效率。 针对无信号控制场景下,行人过街过程中行人与车辆存在冲突的现状,基于博弈论,分析了人车冲突过程中的决策行为。通过对行人过街过程进行分析,能够发现行人与车辆的博弈过程受多因素影响,包括行人等待时间、策略选择概率、行人紧张度、策略支付,同时也将延误、风险度、行人风格和车辆驾驶人风格等融合考虑。通过将上述多因素进行综合分析,合理确定了支付效用函数以及支付效用初始值,并根据人车博弈过程构建了3类博弈模型,即混合策略博弈模型、“行人先行”序贯博弈模型和“车辆先行”序贯博弈模型。 通过分析上述3类博弈模型的纳什均衡解和不同情况下博弈双方(行人和车辆)的收益,描述了行人过街和车辆之间的决策行为过程,得到了收益区间与策略选择的关系,得出了行人和车辆在不同情况下的占优策略和策略选择情况。研究结果表明:不同风格的行人和车辆驾驶人,在不同阶段、不同行动顺序下决策收益不同,占优策略存在差异。分析人-车冲突的决策过程和决策影响因素对于揭示人-车冲突机理,减少人-车冲突事故具有重要意义。
4 结论
