一种全方位运动八足机器人的创新设计
2023-10-09吴世强
孙 筠,吴世强
(湖北第二师范学院 物理与机电工程学院,武汉 430205)
1 设计背景分析
在自然界和人类社会中,存在一些人类无法到达的地方和可能危及人类生命的特殊场合,如其他行星表面、灾难发生的矿井、防灾救援和反恐斗争等,对这些危险环境进行不断地探索和研究,寻求一条解决问题的可行途径成为科学技术发展和人类社会进步的需要。[1]在以上特殊场合主要运用机器人代替人类进行作业,不同场合对机器人有不同的要求,如在路况不同的情况下要求机器人有良好的行走功能。
行走机器人主要行走方式有多足式、车轮式和履带式,三种方式各有优缺点。车轮式和履带式在平坦地形上行驶时速度快、平稳、控制简单,但在不平坦或松软地形时机动性大大降低。在该背景下多足机器人应运而生,主要在地形不规则、崎岖时表现出明显优势。[2]
目前对四足、六足机器人研究较多,随着对危险环境监测和探索的深入,对多足机器人的灵活性与智能性提出了更高的要求。八足机器人相比于四足、六足而言运动更加灵活,承载能力更强,可携带的探测器和传感器更多,可操作性和智能性更强。
2 八足机器人的机械结构设计
2.1 躯体设计
如图1和图2所示,躯体设计成正八边形结构,上下壳体分开设计,八足平均分配到正八边形的8个角上,每个角开一个直径15mm 小孔,用于外侧舵机与控制板连接、USB 数据线与电脑连接以及充电插口的连接。躯体内部空出,用来放置电池、控制板、遥控模块、控制线等,躯体上平面为一个平面,可以为安装机械臂、传感器、摄像头、探测器等装置提供位置。壳体内侧每个角开两个直径3.5mm圆柱小孔,用于上下壳体通过螺钉贯穿连接。

图1 躯体下盖模型图

图2 躯体上盖模型图
2.2 足部设计
足部采用开环三杆机构,它是可以实现全方位运动的特殊结构,相比于多杆机构而言加入腿部水平运动关节,其结构如图3所示。其中AB可绕A点在水平面内转动形成一个转动副,BC可绕B点在竖直平面内转动形成一个转动副,CD可绕C点在竖直平面内转动形成一个转动副。其中机架一个(D点与地面接触,A点只算作固定在躯体上,实际是可动的),活动构件3个形成9个自由度,3个转动副形成6个约束,由此可知每个腿上剩余自由度为3,在腿部配备三个舵机带动关节运动,原动机与自由度数量相等,腿部各关节的位置可以通过控制舵机的旋转角度来实现。与传统多杆机构的腿部相比结构更简单,加入水平转动关节[3],更加易于实现身体转动,但缺点是控制电机更多、耗能更大、运动时需要协调各电机的转动情况(运动步态复杂)。
运用三维建模软件SolidWorks建立腿部模型,如图4所示,两个半基节呈十字形背靠背,通过两颗紧定螺钉连接为一个基节;舵机与舵机舱过度配合进行连接;关节连接方法是一侧小孔与突起配合转动,另一侧舵盘与关节用紧定螺钉连接。为了提高机器人运动灵活性,八足机器人可以用8足配合运动也可以用6足配合运动。当只用6足配合运动时,不参与运动的两足可以用来夹取物体,使得机器人功能更加丰富。将腿部分为6只基础腿部和2只夹取腿部。为保证夹取的可靠性,两腿的内侧要求平整,这也是夹取腿部与基础腿部的区别。腿部模型图如图4、图5所示,第二、第三舵机转动控制腿部外侧两关节抬起落下,第一舵机转动控制整个腿部在水平面内向前、向后转动。

图5 夹取左腿模型图
2.3 整体结构设计
八足机器人3D模型如图6所示,8只脚安装在八边形壳体的8个角上,其中2只夹取腿部在最前面(左右各一),6只基础腿部在后面。躯体壳上平面可以为其他机械结构、传感仪器等提供安装位置。

图6 八足机器人3D模型图
3 运动步态分析设计
无论是三角步态还是四角步态,运动原理是相同的。支撑相与地面接触并转动,摆动相在空中抬起和落下、减小摩擦和恢复水平位置,为下一周期运动作准备,摆动相与支撑相互交替循环实现各种运动。[4]
三角步态与四角步态的主要差异是腿分组不同。三角步态如图7所示,后侧的六只脚中L1、L3、R2为一组,L2、R1、R3为一组。四角步态如后文图9所示,八只脚中L1、L3、R2、R4为一组,L2、L4、R1、R3为一组。

图7 三角前行原理图
3.1 三角步态分析设计
三角步态前行运动原理如图7所示。
0至T/2时间内L2逆时针转动,R1 R3顺时针提供向前位移。避免摩擦L1 L3 R2在0至T/4抬起后,T/4至T/2落下。(L2 R1 R3为支撑组,L1 L3 R2为摆动组)
到临界点时,T/2至T时间内L1 L3逆时针转动,R2顺时针转动,提供向前位移。为了恢复在第一个T/2时间内的支撑腿(L2 R1 R3)的位置,为下次支撑做准备,所以在T/2至3T/4时间内L2抬起并顺时针转动、R1 R3抬起并逆时针转动,在3T/4至T时间内L2落下并顺时针转动、R1 R3落下并逆时针转动,并且位置恰好与这组腿的初始位置重合。(L1 L3 R2为支撑组,L2 R1 R3为摆动组)
达到时间T时,换作L2 R1 R3为支撑组,L1 L3 R2为摆动组,这两组不断交替,完成前行动作。
后退相比于前行而言,原理是一样的,只是每次支撑腿在水平方向上的转动方向都相反。
躯体右转动只需支撑相交替在水平方向向左转动,转动情况如图8所示。左转原理以此类推。
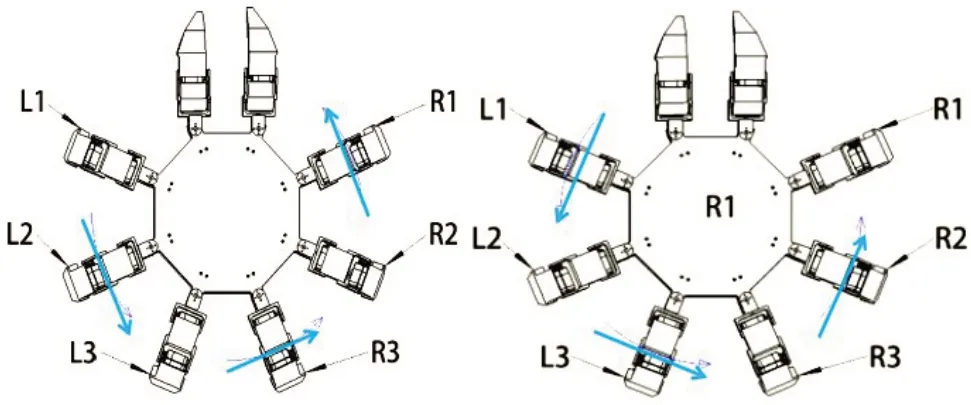
图8 三角右转原理图
根据运动原理得出各舵机的转动情况如表1和表2所示。步态表中a是水平面内转动的角度,b是竖直平面内转动的角度。经过实际调试a=30°,b=40°。

表1 三角前行步态表

表2 三角右转步态表
(编号原则:L11:左边第一条腿上的1号舵机,L12:左边第一条腿上的2号舵机,L13:左边第一条腿上的3号舵机,R11:右边第一条腿上的1 号舵机,R22:右边第二条腿上的2 号舵机,R33:右边第三条腿上的3 号舵机,余下的以此类推)
3.2 四角步态分析设计
四角前行相比于三角前行而言,按图9 所示交替变换支撑腿与摆动腿。以此类推可得四角步态后退原理。其余四角步态运动原理依据四角步态的分组情况和三角步态运动原理类比可得出。

图9 四角前行原理图
四角前行步态如表3所示,其他步态表结合运动原理可推出。

表3 四角前行步态表
4 控制系统的设计
4.1 驱动部件的选择
八足机器人负荷较小,所有24个可活动关节采取同一型号的舵机驱动。选择舵机时需要考虑的参数有输出的转动速度、扭矩大小、工作电压、尺寸、重量、材料等。根据机器人腿部结构大小、整体重量、舵机参数以及驱动能力等因素综合分析后,选择MG995 型号的舵机,该舵机最大转动角度为180°,最大输出扭矩为13kg·cm。
4.2 控制模块的选择
机器人控制板选用基于ARM Cortex-M3 内核高性能STM32 单片机的24 路舵机控制板,该控制板运行速度快,控制精度高,可对24 个舵机进行独立控制,以保证各个动作执行的流畅性和精准性。支持上位机软件对动作组在线调试、脱机运行和下载,拥有16M 的大容量内存,可以容纳230 个动作组,每个动作组可以容纳510 个动作。支持手机蓝牙控制和PS2 手柄控制(遥控范围约为10m,距离增加可在控制板上连接高频发射器)。
4.3 控制方案的设计
根据八足机器人腿部各种运动状态时的动作姿态,可得出在相应时间各舵机旋转的角度。运动具有较高的对称性,可在上位机里面设定大致参数后下载到第100 组(第100 组可脱机运行)里面进行运行调试,调试达到要求后下载到对应的动作组即可。手柄或手机按下动作指令到机器人实现对应运动的原理如图10 所示。

图10 动作指令到实现运动原理图
5 实验测试
八足机器人的部分标准零部件可直接采购,剩余非标准件采用常规的机加工与3D打印机进行加工。每个关节的舵机与舵机舱过盈配合连接,关节一侧是小孔与突起连接(突起直径5mm,孔直径5mm,高度为2mm)形成轴与孔的过渡配合,舵机齿与舵盘过盈配合连接,舵盘与关节通过自锁螺钉连接以此完成每个可转动关节的连接;上下壳体之间通过长螺钉贯穿舵机连接。实物如图11所示。
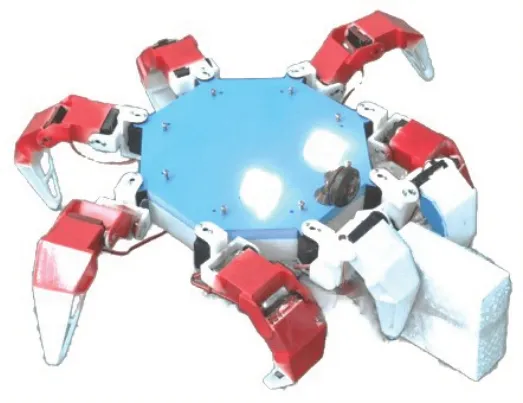
图11 八足机器人实物图
将对应动作下载至控制板,得出以下运动测试结果。四角步态运动时,每组都有交错四只脚与地面接触,重心位置变化不大,运动平稳;三角步态运动时,前侧两足可以完成夹取物体动作,且不受三角步态运动影响,依靠后侧六足交替实现运动,运动稳定性也较好。
6 总结
八足机器人腿部结构运用简单的开环三杆机构实现全方位运动,相比传统多杆机构而言结构更简单,特别是在实现身体转动时优势明显。每条腿三个自由度,既可以调节腿部在空间的位置,又可以调节身体重心。设计创新点主要包含:
(1)运动实时性强。可以通过PS2手柄(装上蓝牙模块可手机蓝牙控制)实时控制机器人,手柄最多可以控制执行21组动作。
(2)运动步态多样。既可以四角步态运动也可以三角步态运动,且在三角步态运动时剩余两足可单独夹取物体,不受三角步态影响。
(3)智能操控性高。选择的控制板可以与其他单片机通信,配合传感器可提高机器人的智能水平。
(4)应用场景丰富。机器人上盖装有摄像头,处于视野盲区内时,可通过实时监控画面,进行一定距离的遥控,也可应用在环境检测等方面。
