双层网络上多智能体系统的部分分量一致性
2023-10-04杨珺博马忠军李科赞
杨珺博,马忠军,2†,李科赞,2
(1.桂林电子科技大学数学与计算科学学院,广西桂林 541004;2.桂林电子科技大学广西密码学与信息安全重点实验室,广西桂林 541004)
1 引言
近十几年来,随着人工智能技术的快速发展,多智能体系统的群聚行为已成为研究热点[1-3].一致性作为多智能体系统中一种重要的集体动力学行为,其核心是多个智能体在控制协议的作用下,其位置或速度等状态变量渐近趋同.多智能体系统的一致性在无人飞行器编队、传感器网络和智能交通等领域得到了广泛地应用.
多智能体系统的一致性最早由文献[4]提出,随后,不同种类的一致性问题被先后讨论,如文献[5]提出了一种离散时间一致性协议,并讨论了具有固定结构的二阶多智能体系统在非饱和输入条件下的恒同一致性问题;文献[6]考虑了领导-跟随多智能体系统的分布式模糊容错滞后一致性问题;文献[7]探讨了由一阶和二阶智能体组成的混合阶多智能体系统的平均一致滤波问题;文献[8]研究了含未知耦合权重的一阶非线性领导-跟随多智能体系统的实用一致性问题;文献[9]讨论了具有有向拓扑不确定非线性多智能体系统的固定时滞二分一致性问题;文献[10]探究了二阶多智能体系统的聚类一致性问题.
多层网络是当今复杂网络领域最前沿的研究方向之一[11-14],多层网络的同步或一致性等问题引起了许多研究者的兴趣.文献[15]讨论了双层双向加权星型网络的同步问题;文献[16]探讨了具有非线性动力学和多层定号有向图拓扑的领导-跟随多智能体系统的二分一致性问题;文献[17]研究了受通信边缘攻击的双层多领导-跟随智能体系统的恒同一致问题;文献[18]层间耦合具有脉冲效应的多智能体系统在脉冲牵制控制下的同步问题.
上述文献研究的一致性问题均考虑的是多智能体系统中所有(或部分)智能体的全部状态变量渐近趋同(即恒同一致).然而,在某些情况下,由于实际应用方面的一些因素或需要,并不要求智能体中的全部分量达成一致,仅部分相关分量达成一致就可满足所需控制效果.因此,文献[19]率先提出部分分量一致性的定义,并导出了领导-跟随多智能体系统在牵制控制下达成部分分量一致的充分条件;文献[20]在文献[19]的基础上,导出了领导-跟随多智能体系统在自适应牵制控制下达成部分分量一致的充分条件;文献[21]则探讨了领导-跟随多智能体系统在间歇牵制控制下的部分分量一致性.
上述文献探讨的是单层网络中多智能体系统的部分分量一致性问题,没有考虑双层网络的情形.双层网络能很好地描述各层子网络内部的相互作用和两层子网络之间的相互作用,相对于单层网络来说更符合一些复杂多智能体系统的拓扑特性(如一些城市内部的公共交通系统含有公交车和地铁这两层子网络).因此,研究双层网络上多智能体系统的部分分量一致性很有必要.然而,双层网络上的部分分量一致性问题目前还尚未有研究成果发表.本文的主要创新点在于将单层网络中多智能体系统的部分分量一致性推广到双层网络中,其中,本文的双层网络中两层子网络的拓扑与层间节点间的层间耦合强度均可以不同.
本文第2节给出文中所需的部分变元稳定性理论、图论和矩阵理论的相关知识;第3节研究了双层领导-跟随非线性多智能体系统的部分分量一致性问题,并导出该系统实现部分分量一致的充分条件;在第4节中,数值模拟验证了理论结果的正确性;第5节给出结论并讨论.
2 预备知识
考虑n维非自治常微分方程组
定义3[22]若式(1)的平凡解关于y稳定且吸引,则称式(1)的平凡解关于部分变元y渐近稳定.
定义4[22]若函数ξ ∈C[R+,R+]或(C[(0,r),R+])是连续的严格单调上升函数,且有ξ(0)=0,则称ξ属于K类函数,记为ξ ∈K.
引理1[22]令ζ,ψ,α都是K类函数,若存在函数V(t,x)满足ζ(‖y‖)≤V(t,x)≤ψ(‖y‖),它的导数
则式(1)的平凡解关于y渐近稳定.
引理2[19]任取H∈RN×N,B∈Rn×n,则存在nN阶置换矩阵P=Ps,···,P1(Pi是第1类初等行变换矩阵),使得等式P(H ⊗B)P-1=B ⊗H成立,其中:i=1,···,s,s∈N+;⊗表示克罗内克积.
引理3[23]对任意的半正定对称矩阵Q∈Rn×n,矩阵Θ∈RN×N,有
其中:x∈RnN;y∈RnN;IN表示N阶的单位矩阵.
引理4[24]对任意的对称矩阵A∈RN×N和对称正定(半正定)矩阵B∈Rn×n,对任意向量x∈RNn都有以下不等式成立:
其中λmin(·),λmax(·)分别表示矩阵(·)的最小特征值和最大特征值.
接下来给出本文要用到的图论知识.多智能体系统的通信拓扑通常用图来表示,其中每个节点代表一个智能体,每条边代表两个智能体之间的信息交互.令G={V,E,A}表示一个有向图,其中:V={1,2,···,N}是由N个智能体构成的节点集;E ⊆V×V是智能体信息交互的边集;A=aij∈RN×N表示图G的邻接矩阵,其中aij表示多智能体系统中第i个智能体和第j个智能体之间的信息交互.若eij ∈E,则aij>0,即多智能体系统中第i个智能体到第j个智能体有一条有向边,否则aij=0.定义aii=0,即图G不存在环(多智能体系统中第i个智能体与自身的连边),多智能体系统中第i个智能体的邻居节点集可被定义为Ni={j|(i,j)∈E}.图G对应的Laplace矩阵为L=lij∈RN×N,其中:
3 主要结果
本文考虑的系统由双层网络构成,每层子网络包含N个智能体,两层子网络由同一个领导智能体牵制,xi(t)=(xi1···xin)T∈Rn与yi(t)=(yi1···yin)T∈Rn分别表示第1层与第2层子网络第i个跟随智能体的状态变量,x0(t)∈Rn表示领导智能体的状态变量,构建系统如下:
其中:f(xi)=(f1(xi)···fn(xi))T是非线性连续函数;c>0表示层内耦合强度;ui(t)∈Rn,vi(t)∈Rn分别表示第1 层与第2 层子网络的牵制控制器;B=diag{β1,···,βN}∈RN×N(βi>0,i=1,···,N)表示多智能体系统的层间耦合强度矩阵;Γ=diag{γ1,···,γh,···,γn}∈Rn×n(γh>0,h=1,···,l)为表征两个节点状态变量中各个分量耦合情形的n维矩阵;L=lij∈RN×N,W=wij∈RN×N分别表示第1层与第2层子网络的Laplace矩阵.
定义第1层与第2层子网络的领导-跟随牵制矩阵D1=diag{d11,···,d1N}∈RN×N,D2=diag{d21,···,d2N}∈RN×N,当第1层或第2层第i个跟随智能体接收到领导智能体信息时,dki>0,否则dki=0(k=1,2).设计牵制控制器,即
其中c与Γ的定义与式(2)中相同.定义第1层与第2层子网络的相关误差,即
得误差系统
相应地,误差系统(4)可写成向量形式
其中对任意的q=1,2,···,n有
其中1N表示元素全为1的N维列向量.
接下来,文章给出双层网络部分分量一致的定义与本文将用到的一个假设.
定义5若存在1 ≤l≤n,对任何初始条件,系统(2)的解满足
则称网络(2)关于前l个分量实现部分分量一致.
假设1[21]假设存在常数ε>0,使得非线性函数(·):RnN →RnN满足不等式
定理1在有向网络拓扑下,当每层子网络的每一个连通分支中都至少有一个节点被牵制时,令Φ=diag{ϕ1,ϕ2,···,ϕN}>0,
若系统(2)满足假设1且使得
选取Lyapunov函数
把函数(7)沿着式(6)的轨迹对t求导,有
由假设1可得
因为Ξ是半正定对角矩阵,故由引理3可知
由定理的不等式条件µ<0.因此,由引理1可知式(5)的零解是关于部分变元渐近稳定的,即满足
因此,系统(2)达成关于前l个分量的部分分量一致.
证毕.
令B=βIN(β>0),当系统(2)的双层子网络通讯拓扑与领导-跟随牵制矩阵都相同时,则易得定理1的推论.
推论1在无向网络拓扑下,令L0=L=W,D0=D1=D2,B=βIN(β>0),若系统(2)满足假设1,且系统(2)中每层子网络的每一个连通分支中都至少有一个节点被牵制,且使得
此外,若Γ=diag{γIl,0n-l},γ>0则式(8)可进一步简化为
4 数值模拟
令系统(2)中每层子网络中的N=10,n=3,其通信拓扑如图1所示.
下面考虑双层网络上多智能体系统关于前两个分量的一致性问题(即l=2).令第1层子网络中第i个智能体的演化方程为
第2层子网络中第i个智能体的演化方程为
取ε=3,D1=diag{1,0,0,0,0,0,0,0,0,0},D2=diag{0,0,0,0,1,0,0,0,0,0},Φ=I10,令L,W分别为
则(Φ)s与(Φ)s的最小特征值分别为λ1=0.0020,λ2=0.0335.取c=16,Γ=diag{2,1,1},B=diag{1,2,0.5,0.6,2,1,0.3,0.4,0.9,0.8},运用MATLAB软件计算得到误差轨迹如图2所示.
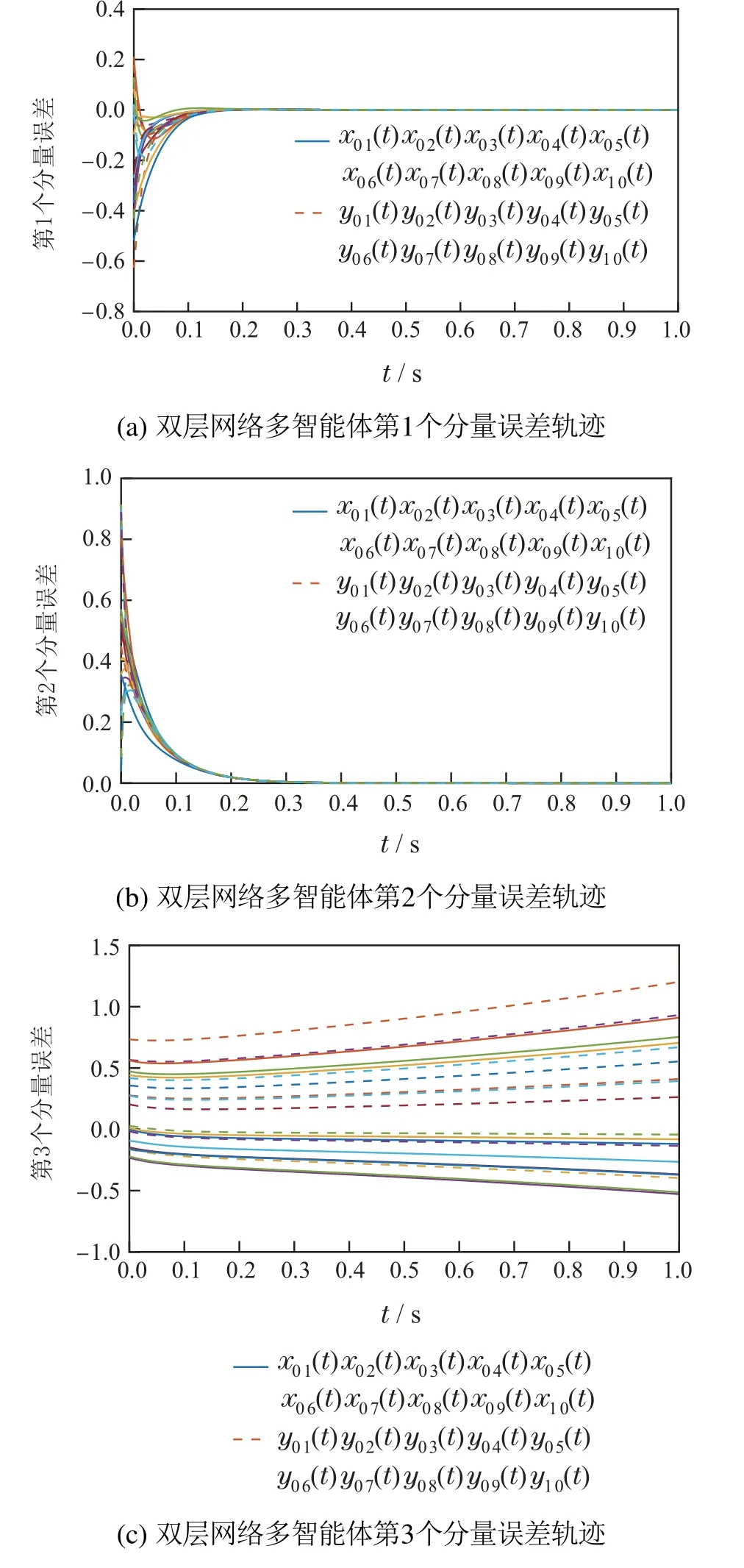
图2 跟随者与领导者的误差轨迹(c=16)Fig.2 The time evolution of the state errors between the leader and the followers
其中图2(a)与图2(b)表示在牵制控制器(3)的作用下双层网络中所有智能体的前两个分量都能达成一致,而图2(c)表明第3个分量没有达成一致.因此,误差系统(6)的零解关于部分变元渐近稳定,即系统(2)在控制协议(3)下实现了部分分量一致性.
5 结论
本文将单层网络上的多智能体系统部分分量一致性相关结论推广到双层网络中,导出了双层网络上具有非线性动力学的领导-跟随多智能体系统在牵制控制下的部分分量一致性问题,得到了双层网络上多智能体系统达成部分分量一致的充分条件,并通过MATLAB 进行数值模拟验证了该充分条件的正确性.需要注意的是,本文系统中第1层子网络与第2层子网络的领导-跟随牵制矩阵可以不同,且每层子网络的通讯拓扑结构也可以不同.下一步,笔者将讨论双层网络在事件触发控制下的部分分量一致性问题.
