基于参数在线辨识的PMSM鲁棒预测电流控制*
2023-09-25粟慧龙汤梦姣
粟慧龙,汤梦姣,程 翔
(湖南铁道职业技术学院智能控制学院,湖南 412001)
0 引言
永磁同步电机(PMSM)因其动态转矩响应快、调速范围宽等优点,已成为城市轨道车辆、船舶推进、高速电梯、风力发电等复杂机电系统的关键和核心部件[1-2]。PMSM因其非线性特性和固有的耦合问题,通常采用磁场定向控制[3-4]。在同步旋转坐标系下,可以通过改变电机定子电流的大小和方向来实现磁场和转矩的解耦,使交流电机的控制难度与直流电机的控制相似。因此,电流控制回路的性能对PMSM控制系统的品质起着至关重要的作用。
近年来,滞环电流控制[5]、模糊PI控制[6]和预测电流控制[7]等高效的电流控制策略广受青睐。其中,DPCC由于原理简单、动态响应快等优点,成为了PMSM系统中被广泛使用的一种电流优化控制策略。然而,DPCC是基于PMSM离散数学模型的控制算法,对模型参数的依赖性较高[8]。在实际应用中,受到温度、负载扰动、外磁场以及永磁体氧化等因素影响,会引起PMSM的定子电阻、电感和永磁体磁链等参数的变化[9]。参数变化导致的模型参数失配,会使系统的控制性能下降,甚至降低电机的使用寿命。此外,在离散控制系统中,电流采样的延时也会影响DPCC的性能[10]。因此,对常规DPCC的优化,以提高其容错性和鲁棒性是有必要的。
电机实际参数的变化被当成扰动进行观测和补偿是解决DPCC模型参数失配的主要方法之一。ZHANG等[11]提出了一种改进的DPCC方法,通过对定子电流的预测和参数扰动的估计,补偿了一拍延迟和参数不匹配的影响。JIANG等[12]设计了一种带有高阶滑模观测器的DPCC和滑模控制策略,同时提升了对负载和参数变化的抗扰性。WANG等[13]提出了一种基于增强预测模型和指数扩展状态观测器的DPCC方法,不仅提高了系统对参数和负载扰动的鲁棒性,还消除了时滞的影响。上述改进的DPCC方法虽然能够有效的解决参数不匹配和电流采样延迟的问题,但观测器的构造过于复杂,而且无法准确的跟踪电机参数的变化。另一类解决DPCC对参数敏感问题的方法是结合参数在线辨识技术。YAO等[14]提出了一种带参数辨识的DPCC方法,实现了系统在电机定子电阻和电感参数不准确下的零稳态电流误差和无差拍动态电流响应。ZHOU等[15]采用卡尔曼滤波算法分别对电感和磁链进行有效识别,有效改善了DPCC驱动系统的性能。结合参数在线辨识的方法能够较好的解决模型参数失配的影响,但对在线辨识方法的性能要求也较高。
为解决模型参数失配和一拍延时对PMSM控制系统的不良影响,本文提出了一种基于参数在线辨识的NR-DPCC方法。基于改进的Adaline神经网络结构,设计了定子电感和永磁体磁链的参数辨识器,并利用在线辨识的参数来实时更新控制器中的固定参数以提高系统对电机参数的鲁棒性。同时,电流预测值被用来替换当前时刻的采样电流以补偿一拍延时的影响。最后,通过RT-Lab硬件在环仿真实验验证了所提方法的可行性和鲁棒性。
1 预测电流控制及参数失配分析
1.1 PMSM预测电流控制
忽略电机铁芯饱和、涡流和磁滞损耗等条件下,永磁同步电机的状态方程可以表示为[10]:
(1)
式中:id、iq、ud、uq分别为定子电流和电压的d、q轴分量,ψr、Ld、Lq和R为永磁体磁链、d、q轴电感和定子电阻的标称值,ωe为电角速度。
考虑模型参数失配时,采用前向欧拉法对式(1)进行离散化,可得PMSM的离散状态方程为:
(2)
式中:Ts和k分别为采样周期与采样时刻,ΔR、ΔLd、ΔLq和Δψr为模型参数的失配误差。
在离散控制系统中,由于电流采样延时,传统的预测电流控制存在一拍延时的影响,即在kTs时刻计算出的控制电压u(k),到下一时刻才能被应用。PWM更新机制和电流采样时序如图1所示。
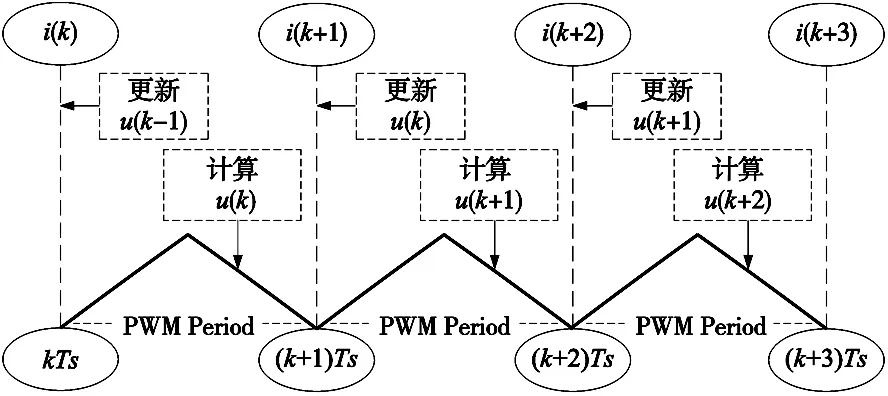
图1 PWM更新机制和电流采样时序图
电机正常运行的情况下,常规DPCC控制器在kTs时刻的输出电压矢量为:
u(k)=F(k)-1[i*(k+1)-E(k)i(k)-P(k)]
(3)
永磁同步电机正常运行时,基于常规DPCC的驱动系统结构如图2所示。首先,将转速环PI控制器输出的交轴给定电流信号、直轴给定电流信号和经坐标变换后的实际响应电流信号代入式(3)所示的预测控制器,计算出下一时刻应作用的电压矢量;然后,通过SVPWM方法合成电压源逆变器所需的开关信号;最后,产生新的响应电流矢量信号又反馈至控制器形成闭环控制。

图2 基于DPCC的PMSM驱动系统结构
1.2 参数敏感性分析

(4)
由式(4)可知,当发生磁链参数失配时(Δψr≠0、ΔLs=0、ΔR=0),q轴响应电流会偏离参考电流,且电流偏差的大小与转速和Δψr的大小正相关。当发生电感参数失配时(ΔLs≠0、Δψr=0、ΔR=0),d轴响应电流会偏离参考电流,且电流偏差的大小与转速和ΔLs的大小正相关。当发生电阻参数失配时(ΔR≠0、Δψr=0、ΔLs=0),d轴和q轴响应电流都会受到影响,但电流偏差的大小与Ts有关。通常情况下,Ts为几kHz,ΔR为几百mΩ或更小,即TsΔR项非常小,故在一定条件下,电阻参数失配对响应电流偏差的影响可以忽略。
令响应电流与参考电流的偏差为:
(5)
根据式(5),利用本文搭建的基于DPCC的PMSM驱动系统,在MATLAB/Simulink中进行了不同的转速n和失配率λ下的电流偏差仿真实验验证,如图3~图5所示。由仿真结果可知:磁链和电感参数失配对d-q轴电流偏差的影响更大,电阻参数失配对电流偏差的影响非常小,与对式(4)的分析一致。

(a) d轴电流偏差 (b) q轴电流偏差

(a) d轴电流偏差 (b) q轴电流偏差

(a) d轴电流偏差(b) q轴电流偏差
2 具有参数更新的预测电流控制
2.1 鲁棒无差拍预测电流控制
根据上述参数敏感性分析可知,基于常规DPCC的PMSM驱动系统对电机的电感和磁链参数比较敏感,响应电流的准确性依赖电机的实际参数值。因此,提出改进的预测电流控制算法来消除电流偏差,提高控制系统对电机参数的鲁棒性是有必要的。
根据式(3),用在线辨识的电感和磁链参数实时更新控制器中的固定参数,可得考虑参数失配的NR-DPCC控制器理想输出电压矢量为:
(6)

(7)
基于NR-DPCC的PMSM驱动系统结构如图6所示。由图6可知,实现鲁棒无差拍预测电流控制的关键在于对电机定子电感和永磁体磁链的在线辨识,同时预测下一时刻的电流值。下一时刻电流预测值代替当前时刻采样电流可以补偿一拍延时的影响;在线辨识的电机参数值来实时更新控制器中的固定参数值可以提高系统对电机参数的鲁棒性。
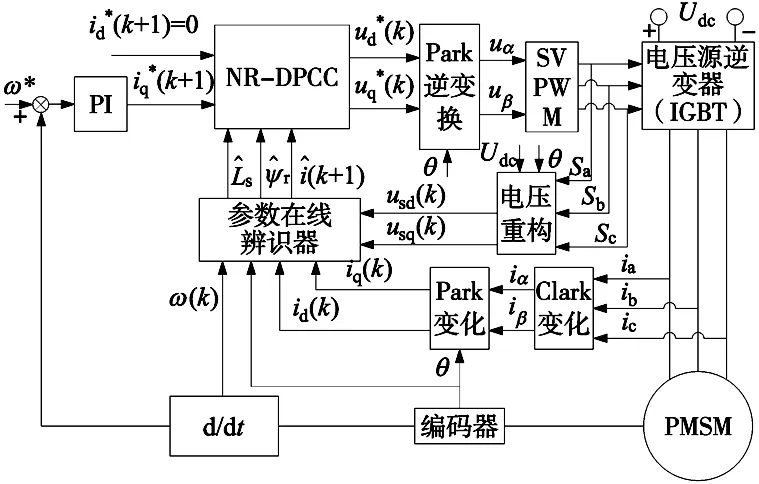
图6 基于NR-DPCC的PMSM驱动系统结构
2.2 新型Adaline神经网络算法
Adaline神经网络参数辨识方法将实际电机与辨识模型分别作为参考与可调模型,在输入相同情况下通过权值自适应学习算法使参考与可调模型两者之间的输出差值收敛到零,进而对可调模型中的权值进行辨识。传统Adaline神经网络算法的结构如图7所示。
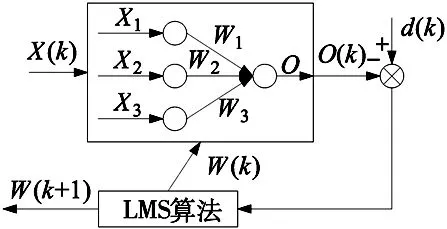
图7 Adaline神经网络系统结构
Adaline神经网络的输出激励函数为:
(8)
式中:Wi、Xi、O(k)分别为网络的权值、输入和输出。若d(k)为目标输出,η为权值的收敛步长,则基于最小均方(least mean square,LMS)的Adaline神经网络权值调整算法为:
Wi(k+1)=Wi(k)+2ηXi[d(k)-O(k)]
(9)
为保证算法的收敛性,式(6)中η需满足[16]:

(10)
上述基于LMS的传统Adaline神经网络辨识系统中,由于权值的收敛步长η是一个定值,它很难同时兼顾系统的收敛速度与辨识精度[16]。当收敛步长η的值设置较大时,系统初始收敛速度较快,但稳态失调也会更大;当设置较小的η时,稳态失调会很小,但初始收敛速度慢,同时系统变化的跟踪能力也会变差。因此,为了削弱这一矛盾,需要对基于LMS的传统Adaline神经网络算法进行优化。
本文利用双曲正切函数的特性,提出了一种应用于电机系统的变步长LMS权值调整算法,具体表示如下:
(11)
式中:η(k)为变步长函数,α为步长函数幅值,β为步长斜率因子。
若令ε(k)=d(k)-O(k)为目标输出和网络输出之间的系统误差,则式(11)所示的变步长函数η(k)与ε(k)之间的关系如图8所示。所提变步长算法利用双曲正切函数tanh(·)的特性来动态调整网络权值的收敛步长,通过设定一个较大的步长函数幅值α来提高系统的初始收敛速度,而当系统误差ε(k)趋向于0的时候,η(k)将随着ε(k)的减少而减少,以进一步提升系统的稳态精度。此外,改变β可以调整η(k)的缓变特征。因此,在实际应用中,选择合理的α和β可以使辨识系统同时具备较快的收敛速度和较小的稳态误差,以提升参数在线辨识的性能。

(a) β=3,α=0.02,0.1,0.2(b) α=0.2,β=3,30,300
2.3 参数辨识器的设计
式(1)的稳态离散化状态方程可以表示为:
(12)
式中:usd(k)和usq(k)分别为d轴和q轴重构电压,具体表示为:
(13)
式中:θ为转子位置角,UAN=(2Sa-Sb-Sc)Udc/3、UBN=(2Sb-Sa-Sc)Udc/3、UCN=(2S-Sa-Sb)Udc/3为逆变器交流侧相电压,Sa、Sb和Sc为逆变器开关状态,Udc为直流母线电压。
当采用id=0的控制策略时,式(9)可以近一步简化为:
(14)
根据式(11)和式(14),设网络结构为:Wi=Ls(k),Xi=ωe(k)iq(k),d(k)=-usd(k),O(k)=Ls(k)ωe(k)iq(k),则可得Ls的Adaline神经网络辨识器为:
(15)
同理,设网络结构为:Wi=ψr(k),Xi=ωe(k),d(k)=-usq(k)-Riq(k),O(k)=ψr(k)ωe(k),则可得ψr的Adaline神经网络辨识器为:
(16)
此外,由式(2)、式(15)和式(16)可得下一时刻的电流预测值为:
(17)
3 实验结果与分析
为了验证NR-DPCC方法的有效性,对PMSM驱动系统进行了硬件在环仿真实验(hardware-in-the-loop simulation,HILS)。RT-Lab实验平台由TMS320F2812 DSP控制器、OP5600仿真机、上位机监控接口、示波器及相关软件组成,如图9所示。OP5600用于构建逆变器、PMSM和其他系统组件。所提NR-DPCC方法在TMS320F2812 DSP上执行。电机的主要参数如表1所示。采样频率设置为5 kHz,给定转速为1000 r/min,负载转矩为10 N·m,直流母线电压为311 V。此外,为了确保各参数辨识器的收敛特性,步长函数的幅值分别设置为:α1=2.5×10-10,α2=7×10-8;步长函数的斜率因子分别设置为:β1=40,β2=5。
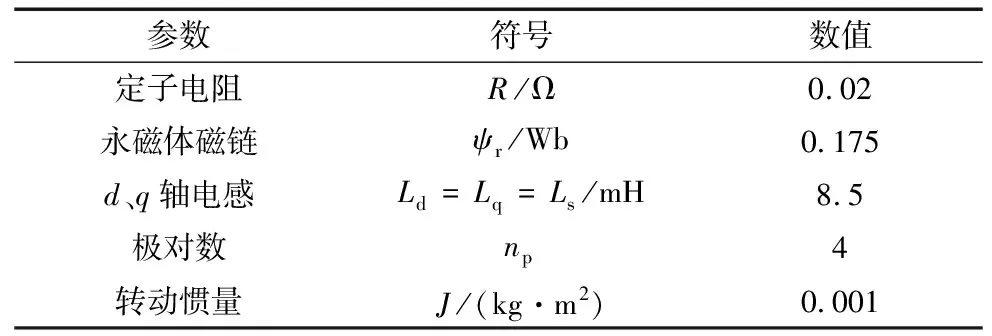
表1 电机主要参数
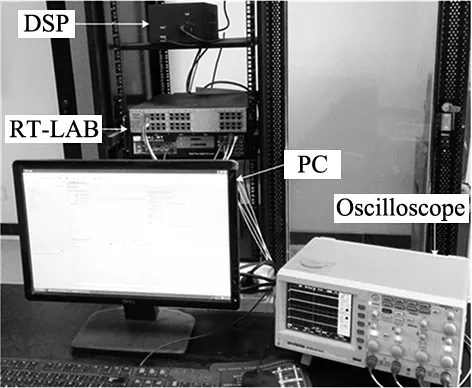
图9 RT-LAB实验台
为了验证磁链失配下参数辨识器和响应电流的性能,在0.15 s时启动磁链和电感参数辨识器,在0.5 s时模拟磁链参数由标称值0.175 Wb突变至0.087 5 Wb。
图10为磁链参数失配下的参数辨识结果。由图10a可知,磁链的辨识结果能在20 ms内收敛到参考值,其稳态辨识值波动在±0.002 5 Wb左右,且在发生参数突变时,磁链辨识器能够快速准确的跟踪上参考值。由图10b可知,电感辨识结果的收敛时间约为50 ms,在无参数失配时,电感稳态辨识结果的波动约为±0.08 mH;在发生磁链参数失配时,电感稳态辨识结果波动增加至±0.15 mH,其原因是系统存在强耦合。实验结果表明:所设计的参数辨识器,能够精准在线跟踪磁链参数的变化,这为控制器参数的更新提供了依据。
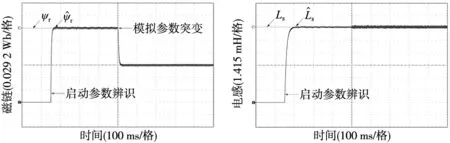
(a) 磁链在线辨识 (b) 电感在线辨识
图10 磁链参数失配下的参数辨识结果
图11显示了常规DPCC方法和所提NR-DPCC方法在磁链参数失配下的d-q轴电流响应波形。可以看出在无参数失配的情况下,常规DPCC和所提NR-DPCC的性能一样好。然而,在磁链参数失配的情况下,常规DPCC的q轴响应电流无法精准的跟踪上参考电流,其电流偏差约为0.7 A,如图11a所示。当采用所提NR-DPCC方法时,控制器中的磁链和电感参数得到实时的更新,避免了模型参数失配的问题,此时q轴响应电流能够准确的跟踪参考电流,如图11b所示。实验结果表明,所提NR-DPCC方法通过实时在线更新磁链参数的变化,能够实现磁链参数失配下的精准电流响应。

(a) 传统DPCC下的d-q轴电流响应 (b) 所提NR-DPCC下的d-q轴电流响应
为了验证电感失配下参数辨识器和响应电流的性能,在0.15 s时启动磁链和电感参数辨识器,在0.5 s时模拟电感参数由标称值8.5 mH突变至4.25 mH。
图12为电感参数失配下的参数辨识结果。由图12a可知,磁链辨识结果在20 ms内收敛到了参考值,其稳态辨识值波动在±0.002 5 Wb左右,且在发生电感参数突变时,对磁链辨识的影响不明显。由图12b可知,在发生参数突变时,电感辨识器能够快速准确的跟踪上参考值,电感突变辨识结果的收敛时间约为52 ms,其稳态辨识结果的波动在±0.085 mH左右。实验结果表明:所设计的参数辨识器,能够精准在线跟踪电感参数的变化。

(a) 磁链在线辨识 (b) 电感在线辨识
图13显示了常规DPCC方法和所提NR-DPCC方法在电感参数失配下的d-q轴电流响应波形。同样在无参数失配的情况下,常规DPCC和所提NR-DPCC的性能一样好。然而,在电感参数失配的情况下,常规DPCC的d轴响应电流无法精准的跟踪上参考电流,其电流偏差约为1.1 A,同时q轴响应电流的脉动变大,如图13a所示。当采用所提NR-DPCC方法时,d轴电流的偏差达到了可以忽略的程度,如图13b所示。实验结果表明,所提NR-DPCC方法通过在线更新电感参数的变化,能够实现电感参数失配下的精准电流响应。

(a) 传统DPCC下的d-q轴电流响应 (b) 所提NR-DPCC下的d-q轴电流响应
4 结论
为了解决控制器参数和电机实际参数不匹配及控制电压一拍延时对PMSM控制系统的不良影响,本文提出了一种应用于永磁同步电机驱动系统性能优化的NR-DPCC方法。结论如下:
(1)通过对PMSM参数敏感性分析,可知磁链和电感参数的失配对响应电流与参考电流的偏差影响更明显,而电阻参数失配对响应电流偏差的影响很小,且在一定条件下可以忽略;
(2)本文采用Adaline神经网络的方法设计了参数辨识器,并提出一种应用于电机系统的变步长LMS权值调整算法,可以使辨识系统同时具备较快的收敛速度和较小的稳态误差;
(3)与常规DPCC方法相比,所提NR-DPCC方法通过实时更新控制器中的参数,并用下一时刻电流预测值替换当前时刻的采样电流,避免了模型参数失配和一拍延迟的影响,有效的提升了控制系统在参数失配下的性能。
由于本文只重点针对磁链和电感参数失配对PMSM驱动系统电流响应性能的影响进行了研究,后续研究工作将考虑未知负载扰动的影响,以进一步提升系统的鲁棒性。
